Paper Menu >>
Journal Menu >>
 Applied Mathematics, 2010, 1, 153-158 doi:10.4236/am.2010.13020 Published Online September 2010 (http://www.SciRP.org/journal/am) Copyright © 2010 SciRes. AM Modified Efficient Families of Two and Three-Step Predictor-Corrector Iterative Methods for Solving Nonlinear Equations Sanjeev Kumar1, Vinay Kanwar2, Sukhjit Singh3 1Department of Applied Sciences, ICL Institute of Engineering and Technology, Sountli, India 2University Institute of Engineering and Technology, Panjab University, Chandigarh, India 3Department of Mathematics, Sant Longowal Institute of Engineering and Technology, Longowal, India E-mail: sanjeevbakshi1@gmail.com, vmithil@yahoo.co.in, sukhjit_d@yahoo.com Received June 9, 2010; revised July 13, 2010; accepted July 16, 2010 Abstract In this paper, we present and analyze modified families of predictor-corrector iterative methods for finding simple zeros of univariate nonlinear equations, permitting 0fx near the root. The main advantage of our methods is that they perform better and moreover, have the same efficiency indices as that of existing multipoint iterative methods. Furthermore, the convergence analysis of the new methods is discussed and several examples are given to illustrate their efficiency. Keywords: Nonlinear Equations, Iterative Methods, Multipoint Iterative Methods, Newton’s Method, Traub-Ostrowski’s Method, Predictor-Corrector Methods, Order of Convergence 1. Introduction One of the most important and challenging problems in computational mathematics is to compute approximate solutions of the nonlinear equation 0fx (1) Therefore, the design of iterative methods for solving the nonlinear equation is a very interesting and important task in numerical analysis. Assume that Equation (1) has a simple root r which is to be found and let 0 x be our initial guess to this root. To solve this equation, one can use iterative methods such as Newton’s method [1,2] and its variants namely, Halley’s method [1-6], Chebyshev’s method [1-6], Chebyshev-Halley type methods [6] etc. The requirement of 0fx is an essential condition for the convergence of Newton’s method. The above- mentioned variants of Newton’s method have also two problems which restrict their practical applications rig- orously. The first problem is that these methods require the computation of second order derivative. The second problem is that like Newton’s method, these methods require the condition that 0fx in the vicinity of the root. For the first problem, Nedzhibov et al. [5] derived many families of multipoint iterative methods by discre- tizing the second order derivative involved in Cheby- shev-Halley type methods [6]. We mention below only one root-finding technique (2.1) from [5], namely 1 , 2 n nn n nn nn nn n fx zxfx fx fz xz f xfxfz , (2) where . For different specific values of , vari- ous multipoint iterative methods may result from (2). For 1 in (2), we get 12 nnn nn nn n fxfx fz xx f xfxfz . (3) This is the famous Traub-Ostrowski’s formula [1,2,4,5, 7,8], which is an order four formula. This method re- quires one evaluation of the function and two evaluations of its derivative per iteration. Thus the efficiency index [2] of this method is equal to 34 1.587 which is bet- ter than the one of Newton’s method 221.414. Fur- thermore, Sharma and Guha [8] have developed a variant  S. KUMAR ET AL. Copyright © 2010 SciRes. AM 154 of Traub-Ostrowski’s method (3) which is defined by 1 , , 2 , 2 n nn n nn nn nn n nnn nn nn n fx zxfx fz fx yzf xfxfz fyfx afz xy fx fxafz , (4) where a is a parameter. This family requires an additional evaluation of function f x at the point ite- rated by Traub-Ostrowski’s method (3), consequently, the local order of convergence is improved from four to six. For 0a, we obtain the method developed by Grau and Díaz-Barrero [7] defined by 1 , , 2 , 2 n nn n nn nn nn n nn nn nn n fx zxfx fz fx yzf xfxfz fy fx xy fx fxfz . (5) All these multipoint iterative methods are variants of Newton’s method. Therefore, they require sufficiently good initial approximation and fail miserably like New- ton’s method if at any stage of computation, the deriva- tive of the function is zero or very small in the vicinity of the root. Recently, Kanwar and Tomar [3,4] proposed an alter- native to the failure situation of Newton’s method and its various variants. They also derived modifications over the different families of Nedzhibov et al. [5] multipoint iterative methods. Unfortunately, the various families introduced by Kanwar and Tomar [3] produces only multipoint iterative methods of order three. Recently, Mir et al. [9] have proposed a new predic- tor-corrector method (designated as Simpson-Mamta method (SM)), which is defined by 22 1 2, 4 6, 4/2 n nn nnn n nn nnn n fx zx fxpfxf x fx xx fxfzxfz . (6) where p is chosen as a positive or negative sign so as to make the denominator largest in magnitude. This method is obtained by combining the quadratically convergent method due to Mamta et al. [10] and cubically conver- gent method due to Hasnov et al. [11]. This method will not fail like existing methods if f x is very small or even zero in the vicinity of the root. This method re- quires one evaluation of the function and three evalua- tions of its derivative per iteration. Thus the efficiency index of this method is equal to 431.316 which is not better than the one of Newton’s method 221.414 or Traub-Ostrowski’s method 34 1.587. More recently, Gupta et al. [12] have developed a family of ellipse methods given by 1222 n nn nn fx xx f xpfx , (7) where 0p and in which 0fx is permitted at some points in the vicinity of the root. The beauty of this method is that it converges quadratically and more- over, has the same error equation as Newton’s method. Therefore, this method is an efficient alternative to Newton’s method. In this paper, we present two families of predictor- corrector iterative methods based on quadratically con- vergent ellipse method (7), Nedihzbov et al. family (2) and the well-known Traub-Ostrowski’s Formula (3). 2. Development of Methods 2.1. Two-Step Iterative Method and its Order of Convergence Our aim is to develop a scheme that retains the order of convergence of Nedzhibov et al. family (3) and which can be used as an alternative to existing techniques or in cases where existing techniques are not successful. Thus we begin with the following predictor-corrector iterative scheme 222 1222 , , 2 n nn nn nn nn nn nn fx zx fx pfx fz fx xz fx fz fx pfx , (8) where the positive sign is taken if 0 x r and the nega- tive sign is taken if 0 x r. Geometrically, if slope of the curve 0 f x at the point 00 , x fx is nega- tive, then take positive sign otherwise, negative. It is interesting to note that by ignoring the term in p, pro- posed family (8) reduces to Nedzhibov et al. family (2). For 1 in (8), we get  S. KUMAR ET AL. Copyright © 2010 SciRes. AM 155 1222 2 nnn nn nn nn fxfx fz xx f xfz fx pfx , (9) This is the modification over the Formula (3) of Traub- Ostrowski [2,5,7], and is also an order four formula. This method requires same evaluation of the function and its derivative as Traub-Ostrowski’s method per iteration. Thus the efficiency index [2] of this method is equal to 34 1.587 which is better than the one of Newton’s method22 1.414 or SM method 431.316. More importantly, this method will not fail even if the deriva- tive of the function is small or even zero in the vicinity of the root. The asymptotic order of this method is presented in the following theorem. Theorem 1. Suppose f x is sufficiently differen- tiable function in the neighborhood of a simple root r and that 0 x is close to r, then the iteration scheme (8) has 3rd and 4th order convergence for 1) 1 , 2) 1 , respectively. Proof: Since f x is sufficiently differentiable, ex- panding n f x and n f x about x r by Taylor’s expansion, we have 2345 6 2345nnnnnn n fx frececececeOe (10) and 2345 234 5 12 345 nnnnnn fxfrcecececeO e (11) where nn exr and 1, 2,3,... ! k k fr ck kfr Using Equations (10) and (11), we have 223345 232 4232 2374 n nnnn n n fx ececcecccceOe fx (12) Therefore, 222 2 2 22233 245 22322342 1 11 44814 63. 22 nn nn n n n nnnn n fx fx fx pfxfx fxp fx ececc pecccccpeOe (13) 22233245 22322342 11 4410146 3. 22 nn nnn fzf rceccp ecccccp eOe (14) 22234 23 23 21244 . nn nnnn fxfzf r ececccpeOe (15) Using Equations (12), (13) and (15), we obtain 222 2232 32224 242323 1644 22 8325 44. n nn nn nn fz cecccp e fx fz ccccp ccpeOe (16) Using Equations (13)-(16) in Equation (8), we obtain, 2 2322 45 12232 217834914 4. 2 nn nn p ececcc eOe (17)  S. KUMAR ET AL. Copyright © 2010 SciRes. AM 156 While for 1 in (18), we have 3245 12 23 12. 2 nnn ecccpeOe (18) Thus Equation (18) establishes the maximum order of convergence equal to four, for iteration scheme (8). This completes the proof of the theorem. 2.2. Three-Step Iterative Method and its Order of Convergence On similar lines, we also propose a modification over the Formula (4) of Sharma and Guha [8]. Mir and Zaman [13] have considered three-step quadrature based iterative methods with sixth, seventh and eight order of conver- gence for finding simple zeros of nonlinear equations. Milovannović and Cvetković [14] further presented modifications over three-step iterative methods consid- ered by Mir and Zaman [13]. Also Rafiq et al. [15] have presented similar three-step iterative method based on Newton’s method with sixth-order convergence. All these modifications are targeted at increasing the local order of convergence with a view of increasing their ef- ficiency index. But all these methods are variants of Newton’s method and will not work if f x is very small or zero in the vicinity of the root. To overcome this problem, now we begin with the following predictor- corrector iterative scheme 222 222 1222 , , 2 , n nn nn nn nn nn nn nnn nn nn nn fx zx fx pfx fz fx yz fx fz fx pfx fyfx afz xy fx bfz fx pfx (19) where a and b are parameters to be determined from the following convergence theorem. Theorem 2. Let : f IR denote a real valued function defined on I, where I is a neighborhood of sim- ple root r of . f x Assume that f x is sufficiently differentiable function in I. Then the iteration scheme (19) defines a one-parameter (.., )iea family of sixth order convergence if 2ba and satisfies the following error equation: 22 226 1223 23 7 122 412 4 . n n n e cccpaccpe Oe (20) Proof: follows on the similar steps as given in the pre- vious theorem. The proposed scheme (19) is now given by 222 222 1222 , , 2 , 2 n nn nn nn nn nn nn nnn nn nn nn fx zx fx pfx fz fx yz fx fz fx pfx fyfxafz xy fx a fz fx pfx (21) where a . Note that for 0,p we obtain method (4) obtained by Sharma and Guha [8] and for ,0,0pa , we obtain method (5) developed by Grau and Díaz- Barrero [7]. 3. Numerical Results In this section, we shall present the numerical results obtained by employing the iterative methods namely Newton’s method (NM), Traub-Ostrowski’s method (3) (TOM), Simpson-Mamta method (6) (SM), modified Traub-Ostrowski’s method (9) (MTOM), method (4) for 1a (3 M ) and modified method (21) for 1a (3 M M) respectively to solve nonlinear equations given in Table 1. The results are summarized in Table 2. We use 15 10 as tolerance. Computations have been performed using C in double precision arithmetic. Here all the formulas are tested for 1/2p. The fol- lowing stopping criteria are used for computer programs: 1) 1nn xx , 2) 1n fx . The behaviors of existing multipoint iterative schemes and proposed modifications can be compared by their corresponding correction factors. The correction factor () , () n n f x f x which appears in the existing multipoint itera- tive schemes is now modified by 222 () () () n nn f x f xpfx , where 0p . This is always well defined, even if ()0. n fx It is investigated that formulas (8) and (21) give very good approximation to the root when p is taken in between 01p . This is because that for small value of p, the ellipse will shrink in the vertical direction and extend along horizontal direction. This means that our next approximation will move faster to- wards the desired root. However, for 1p but not very large, the formulas work if the initial guess is very close 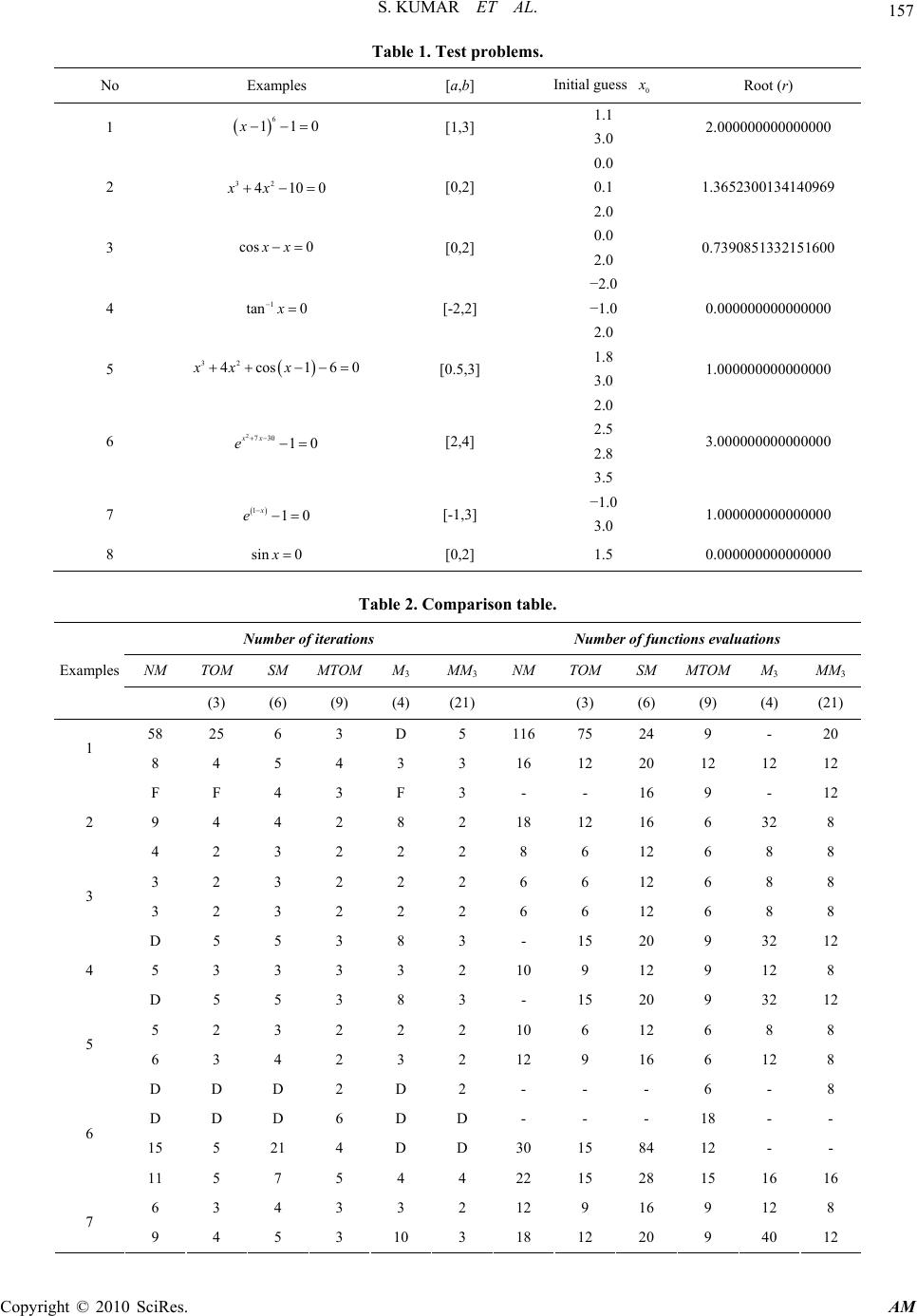 S. KUMAR ET AL. Copyright © 2010 SciRes. AM 157 Table 1. Test problems. No Examples [a,b] Initial guess 0 x Root (r) 1.1 1 6 110x [1,3] 3.0 2.000000000000000 0.0 0.1 2 32 4100xx [0,2] 2.0 1.3652300134140969 0.0 3 cos 0xx [0,2] 2.0 0.7390851332151600 −2.0 −1.0 4 1 tan 0x [-2,2] 2.0 0.000000000000000 1.8 5 32 4cos160xx x [0.5,3] 3.0 1.000000000000000 2.0 2.5 2.8 6 2730 10 xx e [2,4] 3.5 3.000000000000000 −1.0 7 110 x e [-1,3] 3.0 1.000000000000000 8 sin 0x [0,2] 1.5 0.000000000000000 Table 2. Comparison table. Number of iterations Number of functions evaluations Examples NM TOM SM MTOMM3 MM3 NM TOM SM MTOM M3 MM3 (3) (6) (9) (4) (21) (3) (6) (9) (4) (21) 58 25 6 3 D 5 116 75 24 9 - 20 1 8 4 5 4 3 3 16 12 20 12 12 12 F F 4 3 F 3 - - 16 9 - 12 9 4 4 2 8 2 18 12 16 6 32 8 2 4 2 3 2 2 2 8 6 12 6 8 8 3 2 3 2 2 2 6 6 12 6 8 8 3 3 2 3 2 2 2 6 6 12 6 8 8 D 5 5 3 8 3 - 15 20 9 32 12 5 3 3 3 3 2 10 9 12 9 12 8 4 D 5 5 3 8 3 - 15 20 9 32 12 5 2 3 2 2 2 10 6 12 6 8 8 5 6 3 4 2 3 2 12 9 16 6 12 8 D D D 2 D 2 - - - 6 - 8 D D D 6 D D - - - 18 - - 15 5 21 4 D D 30 15 84 12 - - 6 11 5 7 5 4 4 22 15 28 15 16 16 6 3 4 3 3 2 12 9 16 9 12 8 7 9 4 5 3 10 3 18 12 20 9 40 12 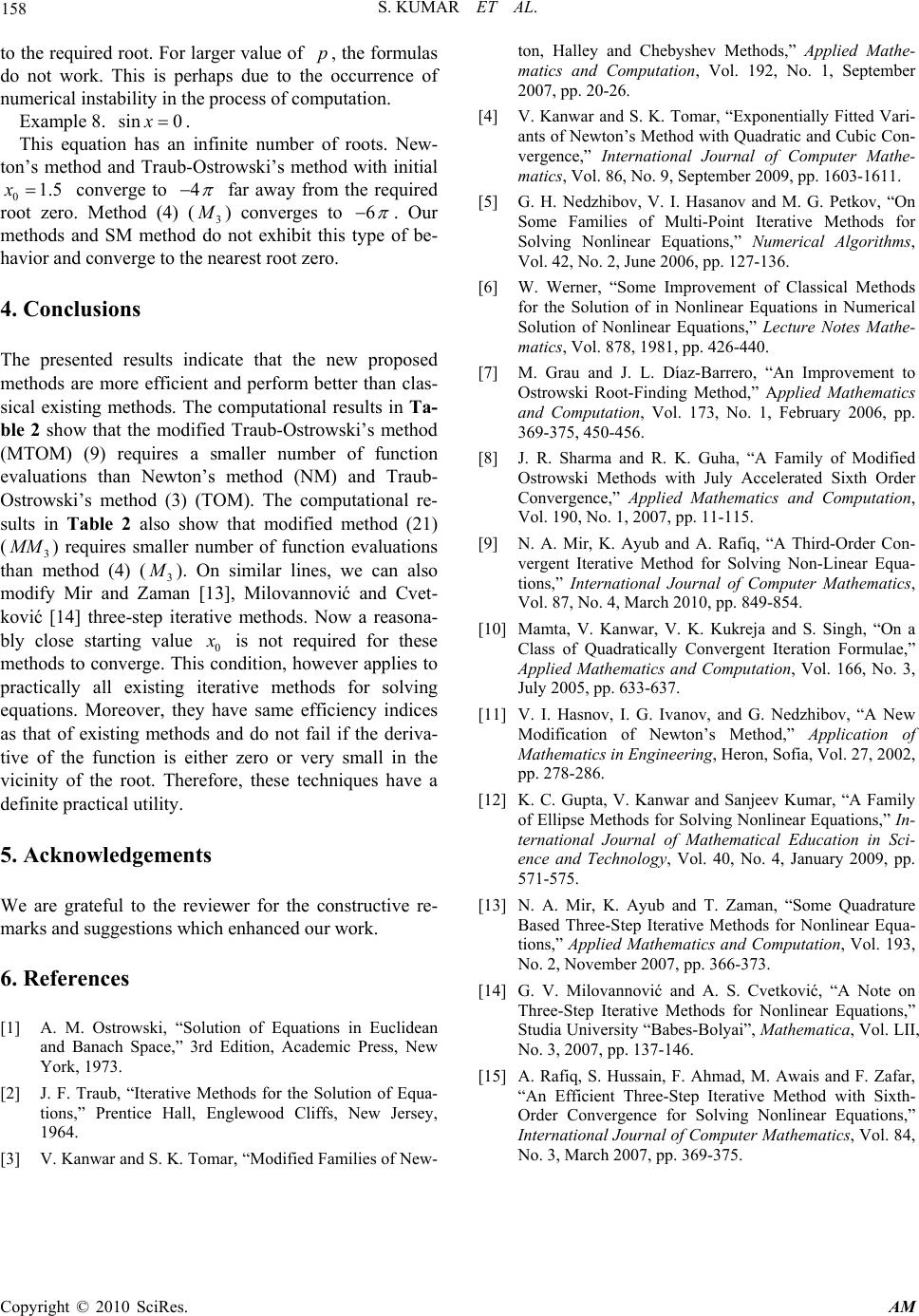 S. KUMAR ET AL. Copyright © 2010 SciRes. AM 158 to the required root. For larger value of p, the formulas do not work. This is perhaps due to the occurrence of numerical instability in the process of computation. Example 8. sin 0x. This equation has an infinite number of roots. New- ton’s method and Traub-Ostrowski’s method with initial 01.5x converge to 4 far away from the required root zero. Method (4) (3 M ) converges to 6 . Our methods and SM method do not exhibit this type of be- havior and converge to the nearest root zero. 4. Conclusions The presented results indicate that the new proposed methods are more efficient and perform better than clas- sical existing methods. The computational results in Ta- ble 2 show that the modified Traub-Ostrowski’s method (MTOM) (9) requires a smaller number of function evaluations than Newton’s method (NM) and Traub- Ostrowski’s method (3) (TOM). The computational re- sults in Table 2 also show that modified method (21) (3 M M) requires smaller number of function evaluations than method (4) (3 M ). On similar lines, we can also modify Mir and Zaman [13], Milovannović and Cvet- ković [14] three-step iterative methods. Now a reasona- bly close starting value 0 x is not required for these methods to converge. This condition, however applies to practically all existing iterative methods for solving equations. Moreover, they have same efficiency indices as that of existing methods and do not fail if the deriva- tive of the function is either zero or very small in the vicinity of the root. Therefore, these techniques have a definite practical utility. 5. Acknowledgements We are grateful to the reviewer for the constructive re- marks and suggestions which enhanced our work. 6. References [1] A. M. Ostrowski, “Solution of Equations in Euclidean and Banach Space,” 3rd Edition, Academic Press, New York, 1973. [2] J. F. Traub, “Iterative Methods for the Solution of Equa- tions,” Prentice Hall, Englewood Cliffs, New Jersey, 1964. [3] V. Kanwar and S. K. Tomar, “Modified Families of New- ton, Halley and Chebyshev Methods,” Applied Mathe- matics and Computation, Vol. 192, No. 1, September 2007, pp. 20-26. [4] V. Kanwar and S. K. Tomar, “Exponentially Fitted Vari- ants of Newton’s Method with Quadratic and Cubic Con- vergence,” International Journal of Computer Mathe- matics, Vol. 86, No. 9, September 2009, pp. 1603-1611. [5] G. H. Nedzhibov, V. I. Hasanov and M. G. Petkov, “On Some Families of Multi-Point Iterative Methods for Solving Nonlinear Equations,” Numerical Algorithms, Vol. 42, No. 2, June 2006, pp. 127-136. [6] W. Werner, “Some Improvement of Classical Methods for the Solution of in Nonlinear Equations in Numerical Solution of Nonlinear Equations,” Lecture Notes Mathe- matics, Vol. 878, 1981, pp. 426-440. [7] M. Grau and J. L. Díaz-Barrero, “An Improvement to Ostrowski Root-Finding Method,” Applied Mathematics and Computation, Vol. 173, No. 1, February 2006, pp. 369-375, 450-456. [8] J. R. Sharma and R. K. Guha, “A Family of Modified Ostrowski Methods with July Accelerated Sixth Order Convergence,” Applied Mathematics and Computation, Vol. 190, No. 1, 2007, pp. 11-115. [9] N. A. Mir, K. Ayub and A. Rafiq, “A Third-Order Con- vergent Iterative Method for Solving Non-Linear Equa- tions,” International Journal of Computer Mathematics, Vol. 87, No. 4, March 2010, pp. 849-854. [10] Mamta, V. Kanwar, V. K. Kukreja and S. Singh, “On a Class of Quadratically Convergent Iteration Formulae,” Applied Mathematics and Computation, Vol. 166, No. 3, July 2005, pp. 633-637. [11] V. I. Hasnov, I. G. Ivanov, and G. Nedzhibov, “A New Modification of Newton’s Method,” Application of Mathematics in Engineering, Heron, Sofia, Vol. 27, 2002, pp. 278-286. [12] K. C. Gupta, V. Kanwar and Sanjeev Kumar, “A Family of Ellipse Methods for Solving Nonlinear Equations,” In- ternational Journal of Mathematical Education in Sci- ence and Technology, Vol. 40, No. 4, January 2009, pp. 571-575. [13] N. A. Mir, K. Ayub and T. Zaman, “Some Quadrature Based Three-Step Iterative Methods for Nonlinear Equa- tions,” Applied Mathematics and Computation, Vol. 193, No. 2, November 2007, pp. 366-373. [14] G. V. Milovannović and A. S. Cvetković, “A Note on Three-Step Iterative Methods for Nonlinear Equations,” Studia University “Babes-Bolyai”, Mathematica, Vol. LII, No. 3, 2007, pp. 137-146. [15] A. Rafiq, S. Hussain, F. Ahmad, M. Awais and F. Zafar, “An Efficient Three-Step Iterative Method with Sixth- Order Convergence for Solving Nonlinear Equations,” International Journal of Computer Mathematics, Vol. 84, No. 3, March 2007, pp. 369-375. |