Paper Menu >>
Journal Menu >>
 International Journal of Modern Nonlinear Theory and Application, 2012, 1, 125-129 http://dx.doi.org/10.4236/ijmnta.2012.14019 Published Online December 2012 (http://www.SciRP.org/journal/ijmnta) Stability Behavior of the Zero Solution for Nonlinear Damped Vectorial Second Order Differential Equation Mohamed A. Ramadan1, Samah M. El-Kholy2 1Department of Mathematics, Faculty of Science, Minufiya University, Shebeen El-koom, Egypt 2Department of Engineering Physics and Mathematics, Faculty of Engineering, Kafr El-Sheikh University, Kafr El-Sheikh, Egypt Email: mramadan@eun.eg, ramadanmohamed13@yahoo.com, samahelkholy77@ yahoo.com Received October 7, 2012; revised November 9, 2012; accepted November 18, 2012 ABSTRACT In this paper, a theoretical treatment of the stability behavior of the zero solution of nonlinear damped oscillator in the vectorial case is investigated. We study the sufficient conditions for the boundedness of solution of the nonlinear damped vectorial oscillator and the conditions for the stability of the zero solution to be uniformly stable as well as as- ymptotically stable. Keywords: Zero Solution; Damped Oscillator; Uniformly Stable; Asymptotically Stable 1. Introduction We consider the nonlinear second order vectorial differ- ential equation of the form 2,ftt t xxxgx0 .R (1) where; 12 ,,, ,:,and, : ,, n n nn tRxxx R tRRR fttR x gx Stability problems for the second order ordinary differ- ential equation has been intensively and widely studied [1-5]. Based on Schauder fixed point theorem T. A. Bur- ton and T. Furumochi [2] introduced a new method to study the stability of the zero solution for Equation (1). This problem is considered also by Gheorghe Morosanu and Cristian Vladimirescu [5,6]. In [6], they used rela- tively classical arguments to prove the stability of the zero solution of Equation (1). While in [5], they obtained new stability results for this ordinary differential equa- tion under more general assumptions. Their approach al- lows extensions to both the vector case and the case of the whole real line. In [7] the dynamics of various oscil- lators had been studied. 2. The Main Results In the next theorem we state sufficient conations for the boundedness of the solution of Equation (1) are given. Theorem 1 If the following hypotheses are hold: 1) 1 f tCR and 0, 0ft t. 2) 1,tCR is decreasing and 1t , tR . 3) n R, n CR R g and g is locally Lipschit- zian in 1,, n x x, 4) g satisfies the following estimate ,tfto g xx , , where tR denotes some norm in . then the solution of Equation (1) is bounded. n R Proof For the n-dimensional system, we have T 12 12 ,,,,,,, m nn x xxyyy Rz, where m = 2n. Applying the transformation, ii i y xftx and 1, 2,,in Equation (1) can be converted into a first order system of differential equations of the form: , A tBt t zzzrz (2) where 1) 12 34 A tAt At A tAt and are m × m matrices. 1 00 0 Bt Bt 2) 14 A tAt ftI, 2 A tI, 3 A ttI , and 2 f tf t I 1 Bt 0nn are n × n matrices. Note that, and I are the zero and the identity matrices, respectively. 3) T 1 ,0 ,, n tgtgt rxx x 1 0 , n t gx which is a 2m1 vector. For ,1,2,,ij n , let is an arbitrary fixed and let 00t C opyright © 2012 SciRes. IJMNTA  M. A. RAMADAN, S. M. EL-KHOLY 126 11 012010 ,, 21 022020 0 ,, 10 0 ,, , ,, , , ,, m ijin j m nijnin j mm m zttzttz tt ZZ zttzttztt Ztt ZZ zttz tt (3) be a fundamental matrix solution to the linear system: A t zz (4) which equal to the identity matrix for . 0 Consider with tt 00z0 z small enough, and let us denote by 00t 00 ,,ttzz 0 z the unique solution of Equa- tion (2) which equal to at . By hypotheses (1) 0 tt and (2), 0 z 0 ,,ttz is defined on a maximal right inter- val, 0,tl, and satisfies the following integral equation: 0 1 000 0000000 ,,,,,,,, ,,d t t ttZ ttZ ttZstBsstssts zzzzzrzz This gives us the following integral inequality: 0 1 000 0000000 ,,,,,e,,,,,d t t ttZ ttZ ttZstBsstssts zzzzzrzz (5) where . T 010e Equations (3) and (4) give us the following differential equations: ,,ijij nij zftzz , , , , (6) ,,nijij nij ztzftz (7) ,,injinj ninj zftzz (8) ,,nin jin jninj ztzftz (9) for . ,1,2,,ij n Since is a decreasing function, so Equations (6) and (7) lead to: t 22 22 ,, ,, 1 2ij nijij nij tz zfttzz 0 2d 22 ,, 0 e t t f uu ij nij tz zt (10) By the same way we can obtain from Equations (8) and (9) the following: 0 2d 22 ,, e t t f uu in jnin j tz z (11) For T 12 12 ,,,,,,, m nn x xxyyy Rz, consider the norm 2 1 m i i z z, where is the norm defined in . m R For T 001 02001020 ,,,,,,, m nn x xxyyy Rz we have: ,, ,0,0 0 00 ,, ,0,0 0 22 ,0,0,0, 0 11 1 ,ijin jijin j nijnin jnijnin j nn n ijjinjjnijjnin jj ij j ZZZZ Ztt ZZZ Z zx zyzx zy xy x zxy y satisfies (4), then we get: Using Shwartz inequality, Minkowski inequality [8] and suitable assumptions lead to: 0 2d 00 00 ,31e t tfu u Zttn t z z (12) We have also: 00tst 1 00 T 1020 0 ,,e ,, ,,,, m Ztt Zst tst tsttst 1 00 0 1 22 00 1 ,,e ,, ,, i i n ii n i Ztt Zst ttsttst Since 2,, mtst t is a decreasing function of , we get: t Copyright © 2012 SciRes. IJMNTA  M. A. RAMADAN, S. M. EL-KHOLY 127 22 2 2 0000 ,,,,,,,,e S 2d t f uu in i ini t tsttsts sstsst So, d 1 00 0 ,, e t S fu u Ztt Zstent (13) As mentioned the system satisfies the integral inequality (5), then inequalities (12) and (13) give 0 1 0000000000 ,,,,,e,,,,,d t t ttZ ttZ ttZstBsstssts zzzzzrzz 0 dd 2 0000 000 ,,31ee tt ttS fu utfuu ttntn tnfs 0 t ,,,df sstss zz z For all t we can replace g by another function say g defined as follows. By hypothesis (4) it follows that there exists a zzgx (14) 0 such that if x, then ,tfto gx x We defined the function by: :nn RRR g ,if ,,if gt tgt ave xx gx xx and we h x, t0. ry ,x It is clear that for eveR tR n ,tgx fto x is of class and is locally Lipschitzian g in n CR R n12 ,,, x xx ginal function . So, we w g satisfies ill admit from now that the all the properties of the ori g. Since 1 f CR we get from inequality (14) that: 0 00 0 0 ,,31e t tfu t ttn t D 0 00 ,, d t s t s du z zz u g zz 0,ttl , with positive constant D [9,10]. This givess the followin 0000 0 ,,31 ,, Dh ttntett l zzz (15) Thus 00 ,,tt z zas well as 00 ,,tt z z are bounded on and so 0,tl 00 ,,tt z z can be extended to the right of l. This contradicts the maximality of l. This means that the solution of Equation (1) is bonded. The proof of theorem 1 is complete. Theorem 2 If the hypotheses of theorem 1 are hold and lowing assumption is satisfied: 1) There exist two constants such that: u the fol- ,0hk 2,ftf tkftth then the zero solution of Equation (1) is uniformly stable solution. If in addition 2) 0 dft t holds, thzero solution en the of Equation (1) is asymptotically stable. Proof n Our stability question is reduced to the stability of the zero solutio 0t z will be divided into two intervals. In the to the system (2). The interval of tfirst interval we have 0,tth and in the second interval ,th . lh and si on a ma Firstly, with nce the hypotheses of theorem 1 are hold, and then the solution ,tz of Equation 00 ,tz l right interval (1xima) is defined 0,tl. It is proved in theorem 1 that the solution is bounded and 00 ,,tt z z cantended to the right of l. Therefore, be ex 00 ,,tt z z exists on 0,tl with lh. Assume hl . We are going to find an estimate for 00 ,,tt z z on the interval ,hl . From hypothesis (1) of theorem 2, we have for thl : , ,,, d t unk fsstgsszz x dd 000 0 ,,31e,e t SS t fuufu ttnhhtnh zzz z 0 , h 00 dd 0 , , t hS fu u nhnkfs fs z z 00 00 h 00 00 e,,,, d t fu ustst s zzxz ,3 1e, t tthtn h z z Copyright © 2012 SciRes. IJMNTA 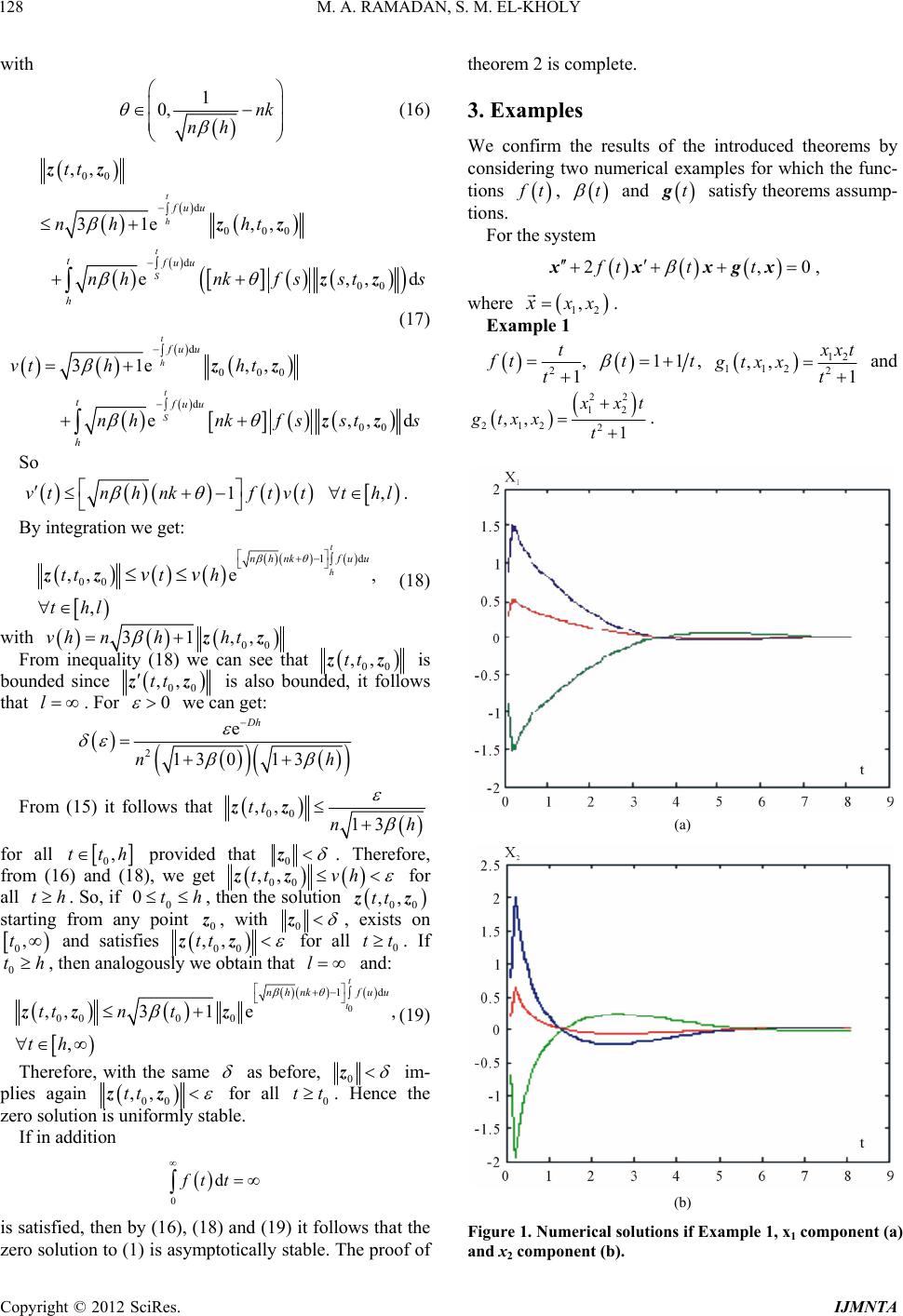 M. A. RAMADAN, S. M. EL-KHOLY 128 with 1 0, nk nh (16) 00 d 000 d 00 ,, 31e ,, e t h t S fuu tfuu h tt nh ht nhnkfs sts zz zz zz , ,d (17) d 000 d 00 31e ,, e, t h t S fuu tfuu h vt hht nhnkfssts zz zz So ,d 1,vtnh nkftvtthl . By integration we get: 1d 00 ,,e , , t h nhnk fuu ttt h thl vv zz (18 with ) 00 31,,vh nhht zz From inequality (18) we can see that 00 ,,tt z z is bounded since 00 ,,tt z z is also bounded, it folls that For ow l .0 we can get: 2 e 13013 Dh nh From (15) it follows that 00 ,, 13 tt nh zz for all 0,tth provided that 0 zore, from (16) and (1t . Theref , we ge8) 00 ,,ttvh zz for all th o, if h, then the solution . S00 t starting 00 ,,ttzz from any point 0 z , with 0 z, exists on 0 t , and satisfies 00 ,,tt zz for al usly we btain that l 0 tt. If and: 0 th, then analogool 0 1d 0 e , t nhnkfuu (19 ,th Therefore, with the same 00 0 ,,31ttnt zz z) t as before, 0 z im- plies again 00 ,,tt zHence the If in z for all 0 tt. zero solution is uniformly stable. addition 0 dft t is satisfied, then by (16), (18) and (19) it follows tha zero solution to (1) is asymptotically stable. The proof of theorem 2 is complete. 3. Examples We confirm the results of the introduced theorems by considering two numerical examples for which the func- tions t the f t, t and tg satisfy theorems assump- tions. For the system 2,ft t t0 xxxgx where , 12 , x xx . Example 1 21 t ft t , 11tt , 12 112 2 ,, 1 x xt gtxxt and 22 12 212 2 ,, 1 x xt gtxx t . (a) (b) Figure 1. Numerical solutions if Example 1, x1 component (a) and x2 component (b). Copyright © 2012 SciRes. IJMNTA 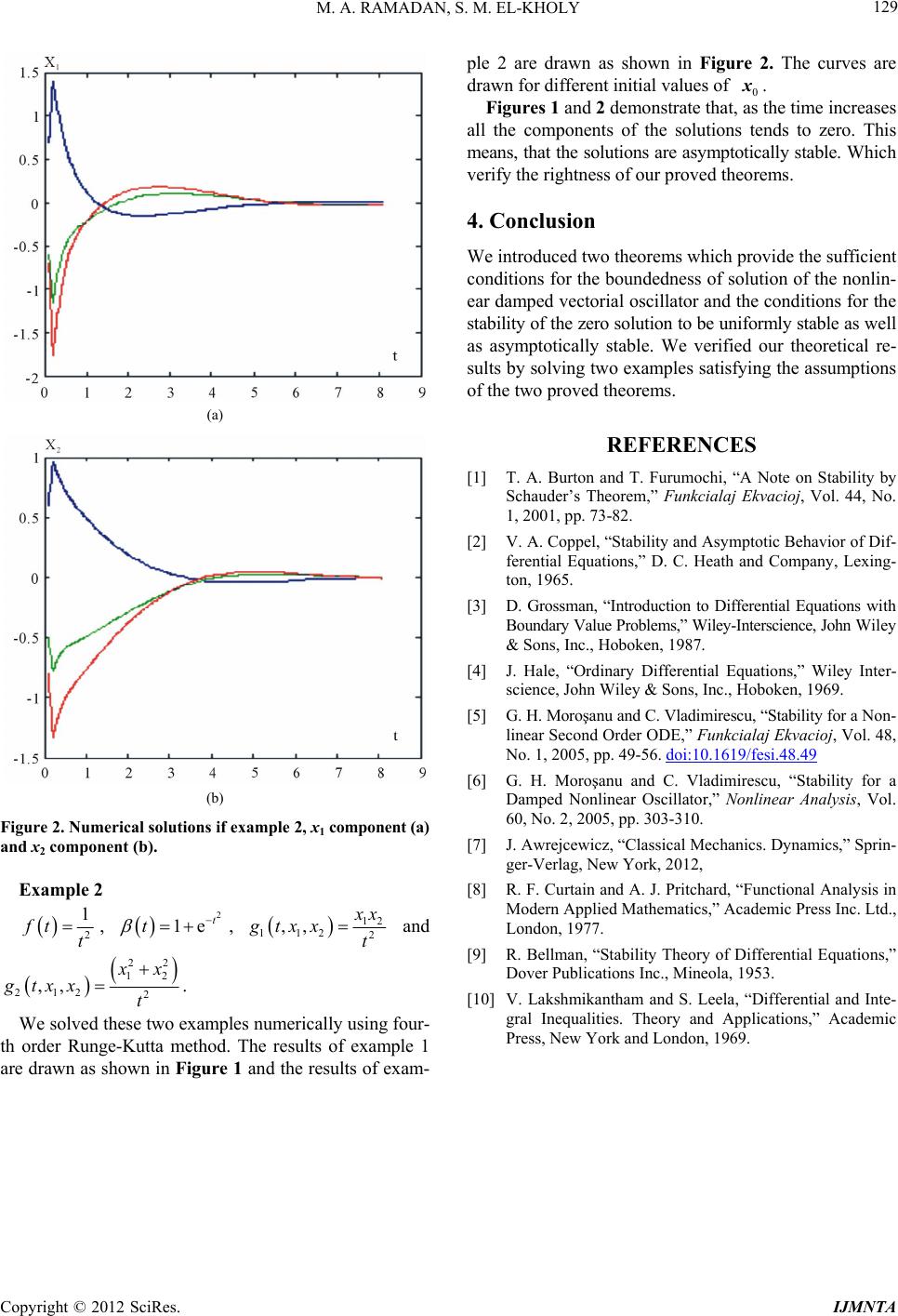 M. A. RAMADAN, S. M. EL-KHOLY 129 (a) (b) Figure 2. Numerical solutions if example 2, x1 component (a) and x2 component (b). Example 2 2 1 ft t , , 2 1e t t 12 112 2 ,, x x gtxx t and 22 12 2 212 ,, x x t . gt xx We solved these two examples numerically using th order Runge-Kutta method. The results of example 1 are drawn as shown in Figure 1 and the results of exam- own in Figure 2. The curves are rawn for different initial values of d 2 demonstrate time increases all the compents of the solutions tends to zero. means, that te aptotically stable. W verify the rightness of our proved theorems. 4. Conclusion ifo ly stable as well as REFERENCES nd T. Furumochi, “A Note on Stability by 87. [4] J. Hale, “Ordina,” Wiley Inter- science, John Woken, 1969. four- ple 2 are drawn as sh d0 x. that, as the Figures 1 an on This he solutions arsymhich We introduced two theorems which provide the sufficient conditions for the boundedness of solution of the nonlin- ear damped vectorial oscillator and the conditions for the stability of the zero solution to be unrm asymptotically stable. We verified our theoretical re- sults by solving two examples satisfying the assumptions of the two proved theorems. [1] T. A. Burton a Schauder’s Theorem,” Funkcialaj Ekvacioj, Vol. 44, No. 1, 2001, pp. 73-82. [2] V. A. Coppel, “Stability and Asymptotic Behavior of Dif- ferential Equations,” D. C. Heath and Company, Lexing- ton, 1965. [3] D. Grossman, “Introduction to Differential Equations with Boundary Value Problems,” Wiley-Interscience, John Wiley & Sons, Inc., Hoboken, 19 ry Differential Equations iley & Sons, Inc., Hob [5] G. H. Moroşanu and C. Vladimirescu, “Stability for a Non- linear Second Order ODE,” Funkcialaj Ekvacioj, Vol. 48, No. 1, 2005, pp. 49-56. doi:10.1619/fesi.48.49 [6] G. H. Moroşanu and C. Vladimirescu, “Stability for a Damped Nonlinear Oscillator,” Nonlinear Analysis, Vol. 60, No. 2, 2005, pp. 303-310. [7] J. Awrejcewicz, “Classical Mechanics. Dynamics,” Sprin- ger-Verlag, New York, 2012, [8] R. F. Curtain and A. J. Pritchard, “Functional Analysis in l and Inte- Modern Applied Mathematics,” Academic Press Inc. Ltd., London, 1977. [9] R. Bellman, “Stability Theory of Differential Equations,” Dover Publications Inc., Mineola, 1953. [10] V. Lakshmikantham and S. Leela, “Differentia gral Inequalities. Theory and Applications,” Academic Press, New York and London, 1969. Copyright © 2012 SciRes. IJMNTA |