A. O. ADESANYA ET AL.
344
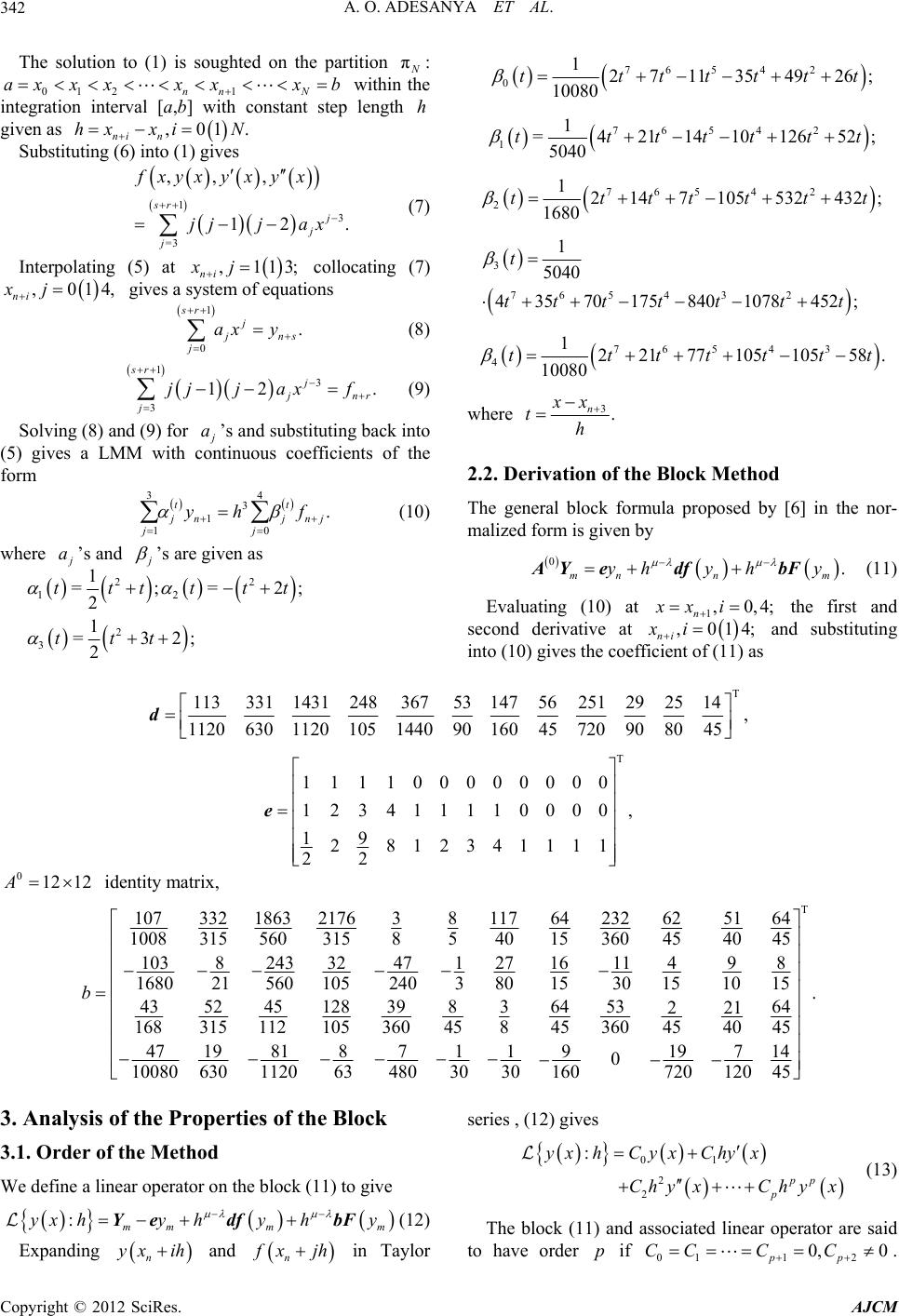
Table 2. Showing result of pr oble m 2, h = 0.1.
XVAL ERC NRC ERR ERR IN [14]
0.1 0.004987516654767 0.004987518195317 1.54055(–09) 1.189947(–11)
0.2 0.019801063624459 0.019801073469968 9.84550(–09) 3.042207(–09)
0.3 0.043999572204435 0.043999595857285 2.36528(–08) 7.779556(–08)
0.4 0.076867491997406 0.076867535270603 4.32732(–08) 7.749556(–07)
0.5 0.117443317649723 0.117443356667842 3.90181(–08) 3.398961(–06)
0.6 0.164557921035623 0.164557928005710 6.97008(–08) 9.501398(–06)
0.7 0.216881160706204 0.216881108673223 5.20329(–08) 1.756558(–06)
0.8 0.272974910431491 0.272974775207245 1.35224(–07) 2.745889(–05)
0.9 0.331350392754953 0.331349917920840 4.74834(–07) 3.888082(–05)
1.0 0.390527531852589 0.390526462491195 1.06936(–06) 5.137153(–05)
corrector method proposed by [11] and [15]. It should be
noted that this method performs better when the step size
(h) is within the stability interval.
REFERENCES
[1] A. O. Adesanya and T. A. Udoh, “Improved Continuous
Method for Direct Solution of General Second Order Or-
dinary Differential Equation,” Journal of Nigeria Asso-
ciation of Mathematical Physics, Vol. 13, 2008, pp. 59-
62.
[2] D. O. Awoyemi, “A P-Stable Linear Multistep Method
for Solving Third Order Ordinary Differential Equation,”
International Journal of Computer Mathematics, Vol. 80,
No. 8, 2003, pp. 85-991.
doi:10.1080/0020716031000079572
[3] D. O. Awoyemi and M. O. Idowu, “A Class of Hybrid
Collocation Method for Third Order Ordinary Differential
Equation,” International Journal of Computer Mathe-
matics, Vol. 82, No. 10, 2005, pp. 1287-1293.
doi:10.1080/00207160500112902
[4] S. N. Jator, “A Sixth Order Linear Multistep Method for
Direct Solution of
=,,
fxyy
,” International
Journal of Pure and Applied Mathematics, Vol. 40, No. 1,
2007, pp. 457-472.
[5] S. N. Jator and J. Li, “A Self Starting Linear Multistep
Method for the Direct Solution of the General Second
Order Initial Value Problems,” International Journal of
Computer Mathematics, Vol. 86, No. 5, 2009, pp. 817-
836. doi:10.1080/00207160701708250
[6] D. O. Awoyemi, E. A. Adebile, A. O. Adesanya and T. A.
Anake, “Modified Block Method for Direct Solution of
Second Order Ordinary Differential Equation,” Interna-
tional Journal of Applies Mathematics and Computation,
Vol. 3, No. 3, 2011, pp. 181-188.
[7] J. D. Lambert, “Computational Methods in Ordinary Dif-
ferential Equation,” John Wiley & Sons Inc., Hoboken,
1973.
[8] S. O. Fatunla, M. N. O. Ikhile and F. O. Otunta, “A Class
of P-Stable Linear Multistep Numerical Method,” Inter-
national Journal of Computer Mathematics, Vol. 72,
1999, pp. 1-13. doi:10.1080/00207169908804830
[9] S. J. Kayode and D. O. Awoyemi, “A Multi-Derivative
Collocation Method for Fifth Order Ordinary Differential
Equation,” Journal of Mathematics and Statistics, Vol. 6,
No. 1, 2010, pp. 60-63. doi:10.3844/jmssp.2010.60.63
[10] Z. Omar and M. Suleiman, “Parallel R-Point Implicit
Block Method for Solving Higher Order Ordinary Dif-
ferential Equation Directly,” Journal of ICT, Vol. 3, No.
1, 2003, pp. 53-66.
[11] L. F. Shampine and H. A. Watts, “Block Implicit One
Step Methods,” Journal of Math of Computation, Vol. 23,
No. 108, 1969, pp. 731-740.
doi:10.1090/S0025-5718-1969-0264854-5
[12] S. J. Kayode, “A Zero Stable Method for Direct Solution
of Fourth Order Ordinary Differential Equations,” Ameri-
can Journal of Applied Sciences, Vol. 5, No. 11, 2009, pp.
1461-1466.
[13] B. T. Olabode and Y. Yusuf, “A New Block Method for
Special Third Order Ordinary Differential Equation,”
Journal of Mathematics and Statistics, Vol. 5, No. 3,
2009, pp. 167-170.
[14] D. O. Awoyemi, M. O. Udoh and A. O. Adesanya, “Non-
Symmetric Collocation Method for Direct Solution of
General Third Order Initial Value Problems of Ordinary
Differential Equation,” Journal of Natural and Applied
Mathematics, Vol. 7, 2006, pp. 31-37.
[15] S. Abbas, “Derivation of a New Block Method Similar to
the Block Trapezoidal Rule for the Numerical Solution of
First Order IVP’s,” Science Echoes, Vol. 2, 2006, pp. 10-
24.
Copyright © 2012 SciRes. AJCM