World Journal of Mechanics, 2012, 2, 334-338
doi:10.4236/wjm.2012.26039 Published Online December 2012 (http://www.SciRP.org/journal/wjm)
Copyright © 2012 SciRes. WJM
Stability Control of Stretch-Twist-Fold Flow by Using
Numerical Methods
Shahab Ud-Din Khan1, Yonglu Shu1, Salah Ud-Din Khan2
1Department of Mathematics and Statistics, Chongqing University, Chongqing, China
2Sustainable Energy Technologies Center, King Saud University, Riyadh, KSA
Email: shahab.furqan@gmail.com
Received September 21, 2012; revised October 24, 2012; accepted November 5, 2012
ABSTRACT
In this study, the multistep method is applied to the STF system. This method has been tested on the STF system, which
is a three-dimensional system of ODE with quadratic nonlinearities. A computer based Matlab program has been de-
veloped in order to solve the STF system. Stable and unstable position of the system has been analyzed graphically and
finally a comparison as well as accuracy between two-step sizes with detail. Newton’s method has been applied to show
the best convergence of this system.
Keywords: STF System; Chaos; Modified Method; Fixed Point Iteration Method; Newton’s Method
1. Introduction
The distinction between slow and fast dynamos was first
drawn by Vainshtein & Zeldovich (1972) in this research;
we describe the stretch-twist-fold (STF) fast dynamo,
which is the archetype of the elementary models of the
process. Basically, stretch-twist-fold is applied in fluid
mechanics in aerospace. In space, any fluid can be D-
Tracked easily so a magnetic field is required to compel
the fluid to be in the same orbit and this method is called
STF system. In this paper, we will investigate the accu-
racy of numerical method. The Multistep method was
first introduced by Goldstine, Herman H. in the begin-
ning of 1977’s. This iterative method has proven rather
successful in dealing with various scientific problems
[1-4] since it provides analytical solutions, which is a
standard numerical method. This method has also been
applied to solve nonlinear systems of ordinary differen-
tial equations. For example, H. B. Keller [5] presented an
extensive comparative study on the accuracy of the
multistep method and C. Lubich [6] studied the effects of
time steps on the stiff problem. J. O. Fatokun and I. K. O.
Ajibola [7] studied multistep method for integrating or-
dinary differential equations on manifolds. Differential
equations are used to model problems in science and en-
gineering that involve the change of some variables with
respect to another. Most of their problems require the
solution to an initial-value problem that is the solution to
a differential equation that satisfies a given initial condi-
tion. In most real-life situations the differential equation
that models the problem is too complicated to solve ex-
actly and one of two approaches is taken to approximate
the solution. The first approach is to simplify the differ-
ential equation to one that can be solved exactly and then
use the solution of the simplified equation to approxi-
mate the solution to the original equation. The other ap-
proach, which we will examine in this paper, uses meth-
ods for approximating the solution of the original prob-
lem. This is the approach that is most commonly taken,
since the approximation methods give more accurate
results and realistic error information. The objective of
this research is to solve STF system and test nonlinear
behavior with different time steps. This modified method
is able to find a stable and unstable position of STF sys-
tem. This method can also give the exact values after
iteration results. Newton’s method is able to show the
best convergence than fixed point iteration method.
2. Stretch-Twist-Fold Flow (STF)
The STF flow is defined as
222
8,
11 33,
2,
xtz xy
ytxy zxz
ztx yzxy
(1)
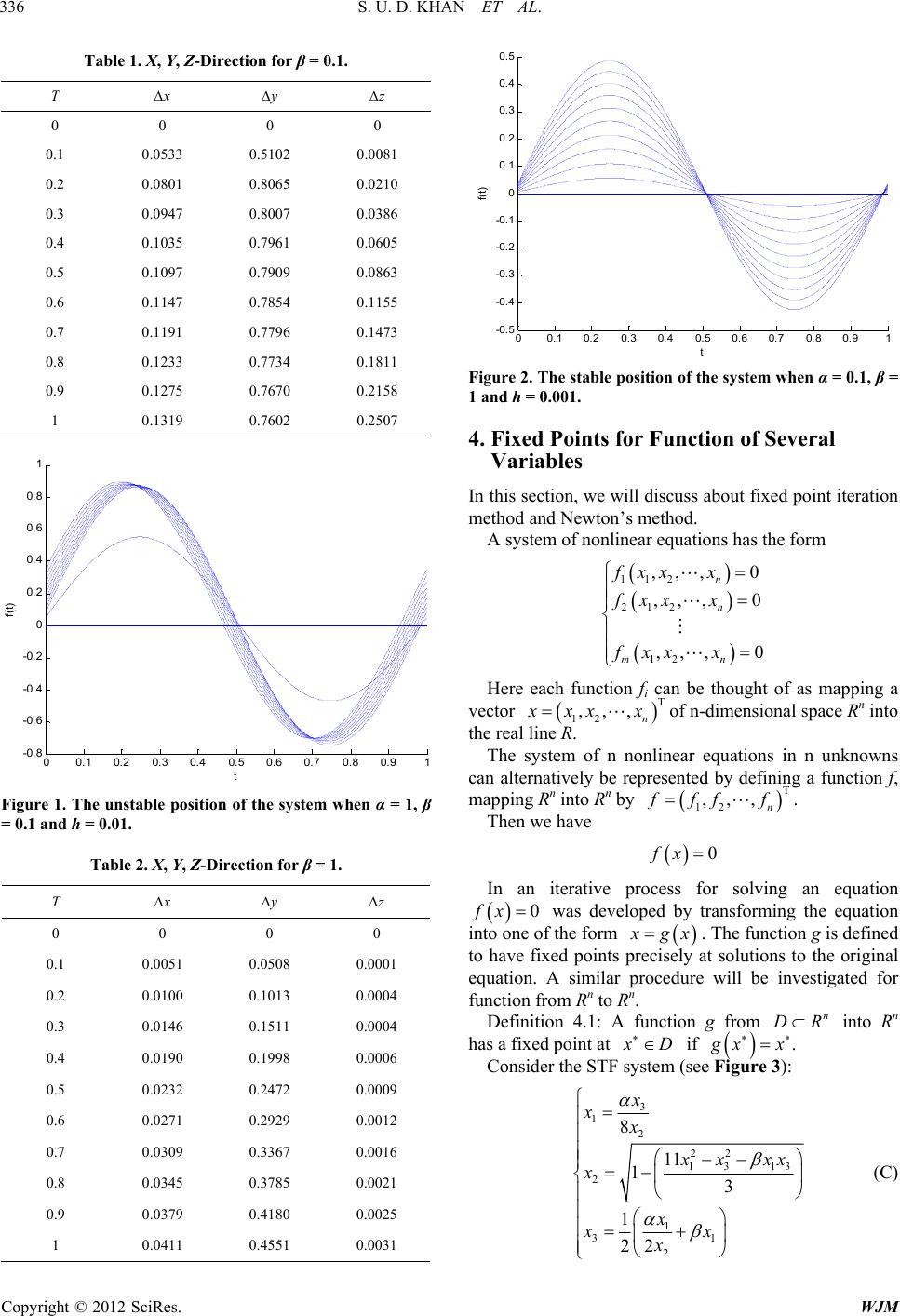
where α = 0.1, β = 1 are positive real parameters and re-
lated to the ratios of intensities of the stretch, twist and
fold ingredients of the flow.
3. Description of Methods
The methods we consider in this section do not produce
a continuous approximation to the solution of the ini-
tial-value problem. Rather, approximations are found at