 World Journal of Mechanics, 2012, 2, 281-287 doi:10.4236/wjm.2012.26034 Published Online December 2012 (http://www.SciRP.org/journal/wjm) Copyright © 2012 SciRes. WJM New Consistent Numerical Modelling of a Travelling Accelerating Concentrated Mass Bartlomiej Dyniewicz1, Czeslaw I. Bajer1,2 1Institute of Fundamental Technological Research, Polish Academy of Sciences, Warsaw, Poland 2The Faculty of Automotive and Construction Machinery Engineering, Warsaw University of Technology, Warsaw, Poland Email: bdynie@ippt.gov.pl Received September 4, 2012; revised October 6, 2012; accepted October 18, 2012 ABSTRACT This paper deals with vibrations of structures subjected to moving inertial loads. In literature structures are usually sub- jected to massless forces. In numerical applications, however, the direct influence of the inertia of a moving object is usually neglected since the characteristic matrices, although simple, can not be easily derived. The paper presents a di- rect, non-iterative treatment of the motion of a mass along the finite element edge. The general characteristic matrices of finite elements that carry an inertial particle are given and can be applied directly to almost all types of structures. Numerical tests and a comparison with examples from the literature and especially with analytical results, prove the efficiency and accuracy of our analysis. Keywords: Vibrations; Moving Mass; Moving Inertial Load; Time Integration 1. Introduction Increasing the speed and weight of vehicle gives rise to new problems, poorly studied as of yet. These are mainly the adverse exploitation effects caused by wave phe- nomena. Problems show up when we perform computer simulations. In the case of wave problems, the numerical description of moving inertial loads requires great mathe- matical care. Otherwise we get a wrong solution. There is no commercial computing package that would enable the direct simulation of moving loads, both gravity and iner- tia. Perhaps this is due to the lack of universal matrices describing such moving inertial loads. Analytical and semi-analytical results for simply sup- ported or cantilever beams under a moving mass are known [1-4]. This solution is based on the classical separation of variables. It results in the finite trigonomet- ric series which fulfils boundary conditions. The inter- esting solution to the problem of interaction between moving bodies and structures is essentially simplified owing to separation of the two objects [5]. However, with more realistic structures usually the finite element approach is applied. Accurate results are fundamental for decisions at a design stage. An accurate estimation of the dynamic influence is essential for proper modelling. Ac- curate results are important not only for increasing the durability and reliability of systems: predicting the level of the dynamic response of structures under a moving load allows of protecting the environment, especially populated urban centres or historical places. The development of computer methods has led to a se- ries of works on numerical calculations, especially using the finite element method. This method is much more versatile than analytical or semi-analytical methods. Pa- pers discussing moving loads with constant or periodic amplitude [6,7] rely on the step by step modification of the right hand side vector of the resulting system of alge- braic equations. The results have been presented in pa- pers devoted to modelling the motion of a vehicle as a group of oscillators [8-10]. These problems require the coincidence of displacements and forces of two subsys- tems: the main structure and the moving oscillator. For the balance of the respective quantities in both systems, a simple iterative procedure is applied. The convergence of such an iterative scheme is limited to a certain range of parameters, such as the travelling velocity, stiffness of the structure, inertia, and especially the time step. Other- wise the iterative procedure must be more complex and time consuming. In addition, the oscillator can not re- place the point mass. In the limiting case of infinite spring stiffness, it has been shown that the moving oscil- lator problem for a simply supported beam is not equiva- lent, in a strict sense, to the moving mass problem [11]. The insertion of the inertia of the moving load effect requires not only modification of the right hand side vector, but also selected parts of the global inertia, damping, and stiffness matrices of the system, at every  B. DYNIEWICZ, C. I. BAJER Copyright © 2012 SciRes. WJM 282 time step. The first study to discuss the influence of the inertia of a moving mass was reported in [12]. An inertial load moving at a constant speed on the Euler beam was considered. Further works [13-15] are also related to beams or plates in which the nodal parameters are inter- polated by cubic polynomials. Let us apply them to the pure hyperbolic equation of the string vibrations. Unfor- tunately, the results there are wrong. Simulations fail because of the divergence of the solution. In literature, we can also find examples of the space- time finite element method applied to moving loads. The idea is based on the equilibrium of the energy of a struc- ture in time interval (Figure 1). It is based on the weak formulation and allows us to solve much more complex problems, including moving concentrated physical parameters. This approach was successfully applied to simple moving mass problem, solved by discrete methods [16,17]. Although the space-time approach in the case of a dif- ferential equation with constant coefficients and station- ary discretization results in practically the same algo- rithms as classical time integration methods, most engi- neers chose methods of the Newmark group for compu- tations. A simple modification of the inertia matrix by adding the AD hoc moving mass lumping in nodes in the Newmark algorithm or direct differentiation of the accel- eration of the mass particle according to the moving ar- gument and then incorporation of the resulting matrices to the solution scheme fail. The practice of numerical simulations, however, re- quires simplicity and efficiency of procedures. Charac- teristic matrices for an inertial particle should be capable of being easily incorporated into computer procedures. Thus all existing commercial codes would gain new pos- sibilities of calculations. We will focus our attention on this aim. We will derive correct matrices which can be applied to discrete solutions by methods of the Newmark group of all types of differential equations, especially a string, the Bernoulli-Euler beam or the Timoshenko beam. They differ from matrices used in literature. Numerical tests Figure 1. The mass trajectory in space and time. and a comparison with test examples published so far are given. 2. Mathematical Model Let us consider differential equations of structures con- taining a concentrated mass. We will focus our attention on the term which describes forces induced by a moving inertial particle. In the case of a string we can write the equation in the form: 22 22 2 2 ,, d, d wxtwxt NA xt wft t xftP xftmt (1) Here, ,wxt is the vertical deflection of the mid- line, m is the moving mass, N is the tension of the string, is the mass density per unit length, P is the external point force, and there is usually a gravitation force mg. The position of the moving point can be described with a quadratic function with respect to time 2 0 1 =2 tx vtvt (2) where 0 is an initial position of the mass. v and v denote the mass velocity and acceleration respectively. We impose initial conditions ,0 0wx , 0 ,0 t wxtt and boundary conditions 0, 0wt , ,0wlt . The Bernoulli-Euler beam is described by the equation 42 42 2 2 ,, d, d wxtwxt EI A xt wft t xftP xftmt (3) with initial conditions ,0 0wx , 0 ,0 t wxtt and boundary conditions 0, 0wt, ,0wlt , 2222 0, 0,, 0,wt xwlt x and the Timoshen- ko beam 22 22 2 2 ,,, d, d w xtw xtxt GA Akx tx wft t xftP xftmt (4) 22 22 ,, , , 0 xtxtw xt GA EIx t kx tx with the same boundary and initial conditions as for the Bernoulli-Euler beam. Here, EI is the bending stiffness, GAk is the shear stiffness, is the rotatory inertia of the cross section of the beam, and is the angle of  B. DYNIEWICZ, C. I. BAJER Copyright © 2012 SciRes. WJM 283 rotation of the cross section. In each type of problem we have identical inertial terms 22 d,d ftmwft tt . Below we will consider only this term, since the remaining parts of the equations are treated in the classical way by the finite element method. Let us follow the direct derivation commonly carried out in the literature. The acceleration of a mass particle moving at a varying speed v in the space-time domain is described by the Renaudot formula 222 22 2 2 2 d, ,, 2 d ,, xft xft ft xft wft twxtwxt vxt tt wxt wxt vv x x (5) where t describes the position of the load. The above formula represents simply the chain rule of derivation. The corresponding parts of the equation describe the lat- eral acceleration, Coriolis acceleration, centrifugal accel- eration and acceleration associated with the change of particle velocity. These names are generally not adequate in the case of all structures. Let us compare two different problems: the vibrations of a string and longitudinal vi- brations of a bar. In both cases we have the identical governing equation. However, in the case of longitudinal displacements we can not call the forces described by terms of the equation as centrifugal or Coriolis. 3. The Finite Element Carrying the Moving Mass Particle We must underline here that the derived matrices con- tribute only the point mass effects. They must be simply added to classical matrices elaborated for a structure, i.e. for a string or a beam. The full discrete motion equation is 11 1 1 ii i mm m ii m Mw CCwKKw Fe (6) Here, M is the inertia matrix of a structure, Mm is a moving mass matrix, added only to the inertia matrix of the element on which it travels. The same occurs in the case of a damping matrix of the structure C and the point mass Cm, and in the case of a stiffness matrix of the structure K and the point mass Km. The vector 1i is the vector of external forces established in time 1i t and i m e is the right hand side vector resulting from the the mass inertia term, established at the beginning of the time interval 1 , ii tt . We will concentrate our attention on the mass influence only, thus we will derive matrices Mm, Cm, Km, and i m e in the equation 11 1ii ii mm mm wCwKwe (7) The matrices of the finite element that carry the iner- tial particle are composed from two sets: matrices de- scribing the element of a structure and matrices that in- corporate the mass influence. Since the elemental matri- ces are commonly known, below we will consider only the influence of the moving mass. The solution of this problem concerns a mass particle moving on a general finite element. This can be applied to all types of structures: strings, beams, plates, shells, etc. Below we will derive the resulting matrices which will then be applied and tested with an Euler and a Ti- moshenko beam. Let us consider a finite element of length b of the edge of the mass trajectory. The mass particle m passes through the finite element with a varying velocity v in the time interval h, starting at the point 0 x (Figure 2). The equation of virtual energy which describes the motion of the inertial particle can be written in the fol- lowing form 2 2 0 d, d d b m wft t wxxftmx t (8) where a virtual displacements wx can be described with a function 12 1xx wxw w bb (9) Quantities marked by * . refer to a virtual state. w1 and w2 are nodal transverse virtual displacements at the ends of a finite element. We take first-order polynomials as the shape functions describing the interpolation of the displacements: 12 ,1 xx wxtw twt bb (10) Here, 1 wt and 2 wt are the nodal displacements in time. This is a natural assumption since the finite ele- ment edge is straight in the case of simple shape func- tions describing linear displacement distributions in the element. In such a case the third term of (5) reduces to zero. That is why we must write the Renaudot formula (5) in a different form: 0 Figure 2. The mass trajectory in the space-time finite element. 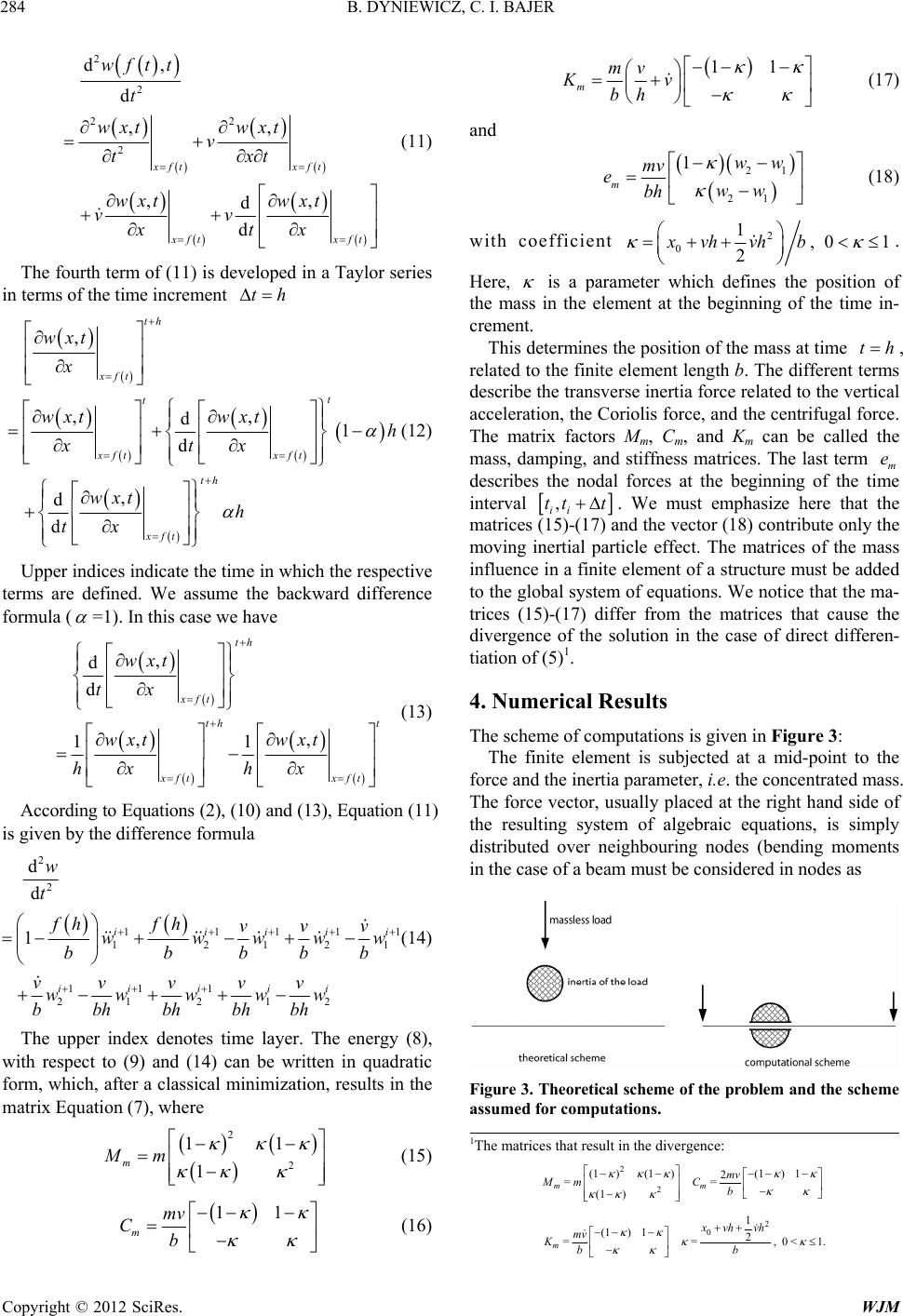 B. DYNIEWICZ, C. I. BAJER Copyright © 2012 SciRes. WJM 284 2 2 22 2 d, d ,, ,, d d xft xft xft xft wft t t wxt wxt vxt t wxt wxt vv xtx (11) The fourth term of (11) is developed in a Taylor series in terms of the time increment th , ,, d1 d , d d th xft t t xft xft th xft wxt x wxtwxth xtx wxth tx (12) Upper indices indicate the time in which the respective terms are defined. We assume the backward difference formula ( =1). In this case we have , d d ,, 11 th xft th t xft xft wxt tx wxt wxt hx hx (13) According to Equations (2), (10) and (13), Equation (11) is given by the difference formula 2 2 11111 12121 111 21 212 d d 1iiiii iiiii w t fhfh vvv wwwww bbbbb vv v vv wwwww bbhbhbhbh (14) The upper index denotes time layer. The energy (8), with respect to (9) and (14) can be written in quadratic form, which, after a classical minimization, results in the matrix Equation (7), where 2 2 11 1 m Mm (15) 11 m mv Cb (16) 11 m mv Kv bh (17) and 21 21 1 m ww mv eww bh (18) with coefficient 2 0 1,0 1 2 xvhvh b . Here, is a parameter which defines the position of the mass in the element at the beginning of the time in- crement. This determines the position of the mass at time th , related to the finite element length b. The different terms describe the transverse inertia force related to the vertical acceleration, the Coriolis force, and the centrifugal force. The matrix factors Mm, Cm, and Km can be called the mass, damping, and stiffness matrices. The last term m e describes the nodal forces at the beginning of the time interval , ii tt t . We must emphasize here that the matrices (15)-(17) and the vector (18) contribute only the moving inertial particle effect. The matrices of the mass influence in a finite element of a structure must be added to the global system of equations. We notice that the ma- trices (15)-(17) differ from the matrices that cause the divergence of the solution in the case of direct differen- tiation of (5)1. 4. Numerical Results The scheme of computations is given in Figure 3: The finite element is subjected at a mid-point to the force and the inertia parameter, i.e. the concentrated mass. The force vector, usually placed at the right hand side of the resulting system of algebraic equations, is simply distributed over neighbouring nodes (bending moments in the case of a beam must be considered in nodes as Figure 3. Theoretical scheme of the problem and the sche me assumed for computations. 1The matrices that result in the divergence: 2 2 (1 )(1 )(1 )1 2 == (1 ) mm mv MmC b 2 0 1 (1) 12 ==,0<1. m xvh vh mv Kbb 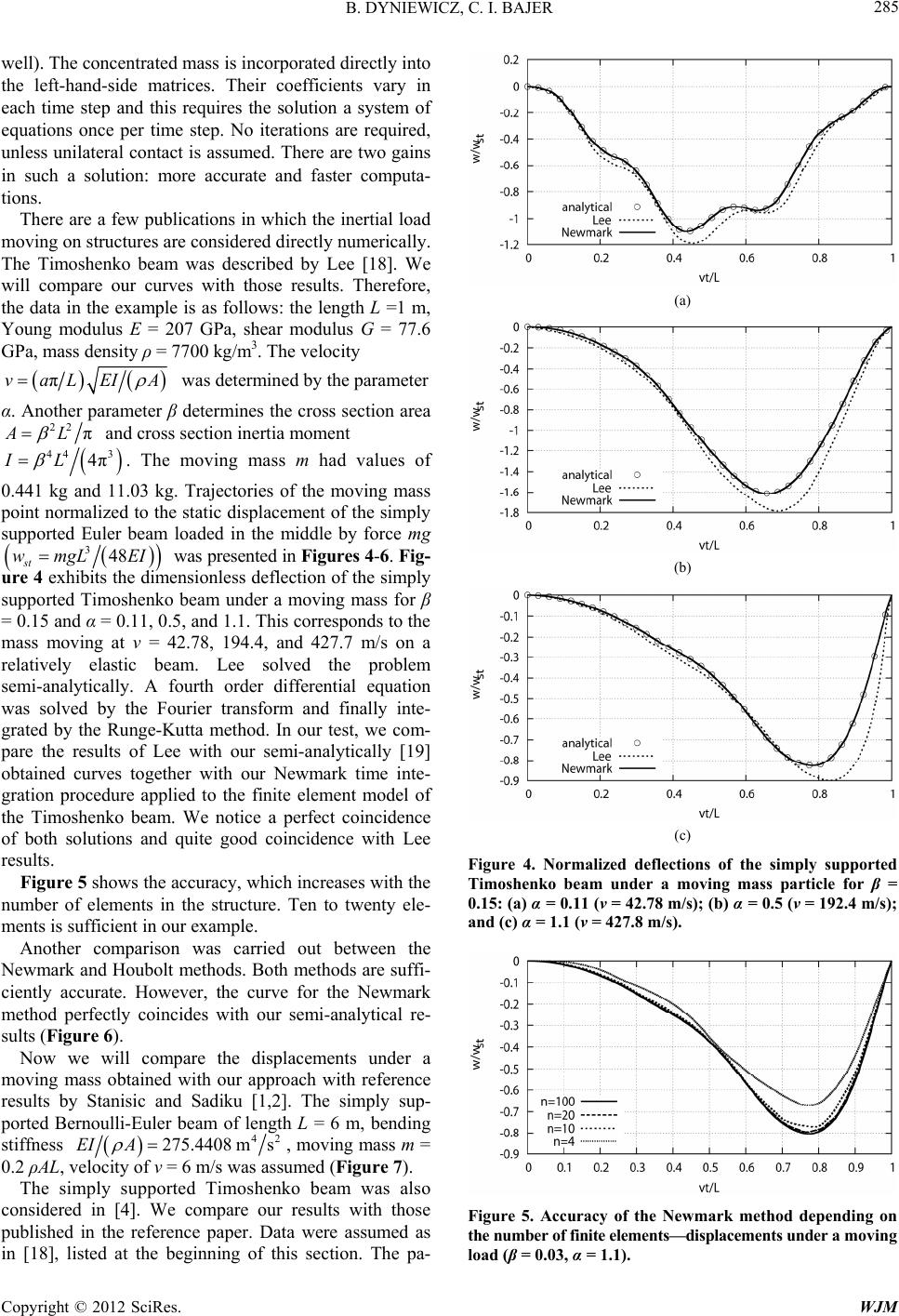 B. DYNIEWICZ, C. I. BAJER Copyright © 2012 SciRes. WJM 285 well). The concentrated mass is incorporated directly into the left-hand-side matrices. Their coefficients vary in each time step and this requires the solution a system of equations once per time step. No iterations are required, unless unilateral contact is assumed. There are two gains in such a solution: more accurate and faster computa- tions. There are a few publications in which the inertial load moving on structures are considered directly numerically. The Timoshenko beam was described by Lee [18]. We will compare our curves with those results. Therefore, the data in the example is as follows: the length L =1 m, Young modulus E = 207 GPa, shear modulus G = 77.6 GPa, mass density ρ = 7700 kg/m3. The velocity πvaLEIA was determined by the parameter α. Another parameter β determines the cross section area 22πAL and cross section inertia moment 44 3 4πIL . The moving mass m had values of 0.441 kg and 11.03 kg. Trajectories of the moving mass point normalized to the static displacement of the simply supported Euler beam loaded in the middle by force mg 348 st wmgL EI was presented in Figures 4-6. Fig- ure 4 exhibits the dimensionless deflection of the simply supported Timoshenko beam under a moving mass for β = 0.15 and α = 0.11, 0.5, and 1.1. This corresponds to the mass moving at v = 42.78, 194.4, and 427.7 m/s on a relatively elastic beam. Lee solved the problem semi-analytically. A fourth order differential equation was solved by the Fourier transform and finally inte- grated by the Runge-Kutta method. In our test, we com- pare the results of Lee with our semi-analytically [19] obtained curves together with our Newmark time inte- gration procedure applied to the finite element model of the Timoshenko beam. We notice a perfect coincidence of both solutions and quite good coincidence with Lee results. Figure 5 shows the accuracy, which increases with the number of elements in the structure. Ten to twenty ele- ments is sufficient in our example. Another comparison was carried out between the Newmark and Houbolt methods. Both methods are suffi- ciently accurate. However, the curve for the Newmark method perfectly coincides with our semi-analytical re- sults (Figure 6). Now we will compare the displacements under a moving mass obtained with our approach with reference results by Stanisic and Sadiku [1,2]. The simply sup- ported Bernoulli-Euler beam of length L = 6 m, bending stiffness 42 275.4408 msEI A , moving mass m = 0.2 ρAL, velocity of v = 6 m/s was assumed (Figure 7). The simply supported Timoshenko beam was also considered in [4]. We compare our results with those published in the reference paper. Data were assumed as in [18], listed at the beginning of this section. The pa- (a) (b) (c) Figure 4. Normalized deflections of the simply supported Timoshenko beam under a moving mass particle for β = 0.15: (a) α = 0.11 (v = 42.78 m/s); (b) α = 0.5 (v = 192.4 m/s); and (c) α = 1.1 (v = 427.8 m/s). Figure 5. Accuracy of the Newmark method depending on the number of finite elements—displacements under a moving load (β = 0.03, α = 1.1). 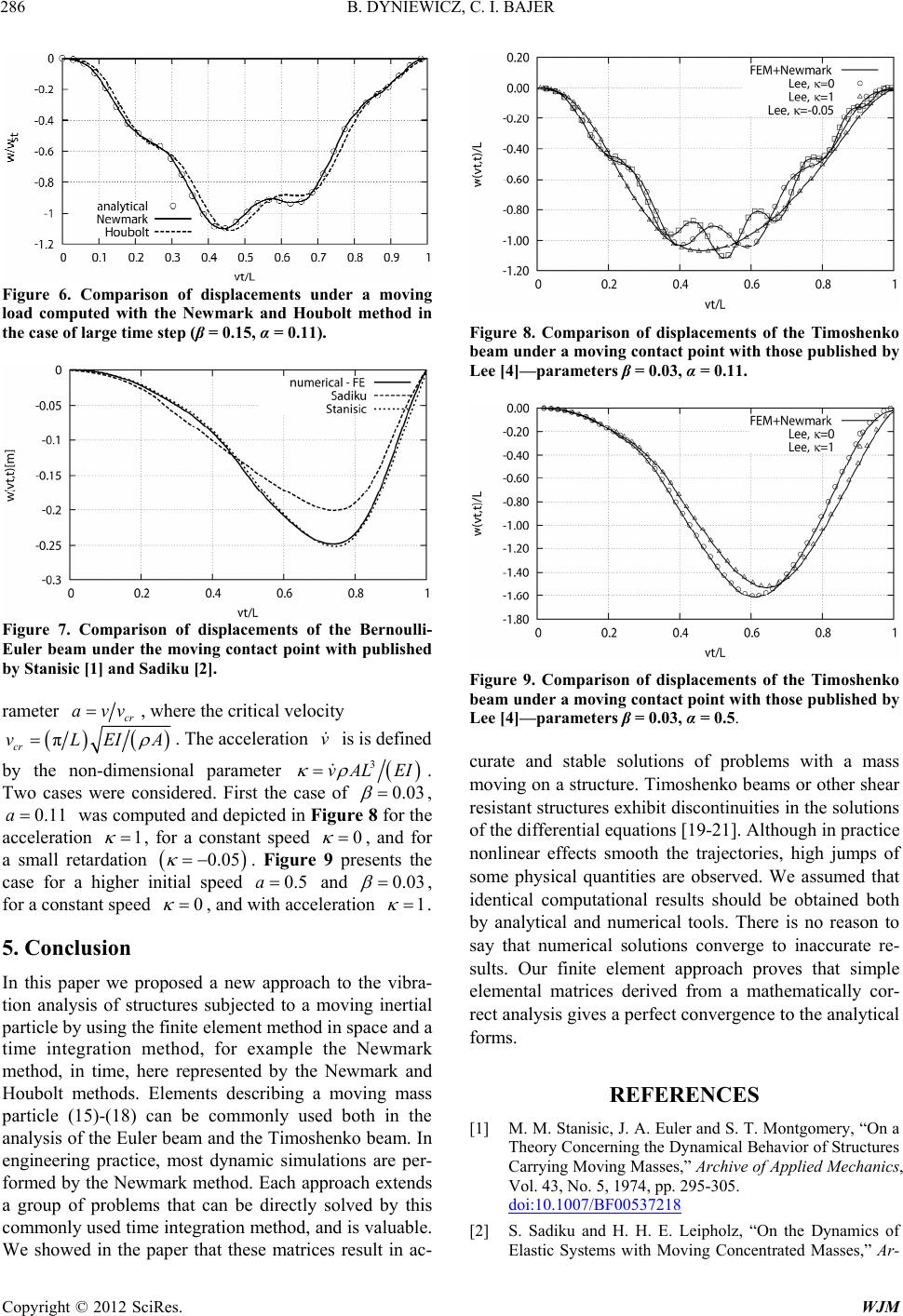 B. DYNIEWICZ, C. I. BAJER Copyright © 2012 SciRes. WJM 286 Figure 6. Comparison of displacements under a moving load computed with the Newmark and Houbolt method in the case of large time step (β = 0.15, α = 0.11). Figure 7. Comparison of displacements of the Bernoulli- Euler beam under the moving contact point with published by Stanisic [1] and Sadiku [2]. rameter cr avv, where the critical velocity π cr vLEIA . The acceleration v is is defined by the non-dimensional parameter 3 vAL EI . Two cases were considered. First the case of 0.03 , 0.11a was computed and depicted in Figure 8 for the acceleration 1 , for a constant speed 0 , and for a small retardation 0.05 . Figure 9 presents the case for a higher initial speed 0.5a and 0.03 , for a constant speed 0 , and with acceleration 1 . 5. Conclusion In this paper we proposed a new approach to the vibra- tion analysis of structures subjected to a moving inertial particle by using the finite element method in space and a time integration method, for example the Newmark method, in time, here represented by the Newmark and Houbolt methods. Elements describing a moving mass particle (15)-(18) can be commonly used both in the analysis of the Euler beam and the Timoshenko beam. In engineering practice, most dynamic simulations are per- formed by the Newmark method. Each approach extends a group of problems that can be directly solved by this commonly used time integration method, and is valuable. We showed in the paper that these matrices result in ac- Figure 8. Comparison of displacements of the Timoshenko beam under a moving contact point with those published by Lee [4]—parameters β = 0.03, α = 0.11. Figure 9. Comparison of displacements of the Timoshenko beam under a moving contact point with those published by Lee [4]—parameters β = 0.03, α = 0.5. curate and stable solutions of problems with a mass moving on a structure. Timoshenko beams or other shear resistant structures exhibit discontinuities in the solutions of the differential equations [19-21]. Although in practice nonlinear effects smooth the trajectories, high jumps of some physical quantities are observed. We assumed that identical computational results should be obtained both by analytical and numerical tools. There is no reason to say that numerical solutions converge to inaccurate re- sults. Our finite element approach proves that simple elemental matrices derived from a mathematically cor- rect analysis gives a perfect convergence to the analytical forms. REFERENCES [1] M. M. Stanisic, J. A. Euler and S. T. Montgomery, “On a Theory Concerning the Dynamical Behavior of Structures Carrying Moving Masses,” Archive of Applied Mechanics, Vol. 43, No. 5, 1974, pp. 295-305. doi:10.1007/BF00537218 [2] S. Sadiku and H. H. E. Leipholz, “On the Dynamics of Elastic Systems with Moving Concentrated Masses,” Ar- 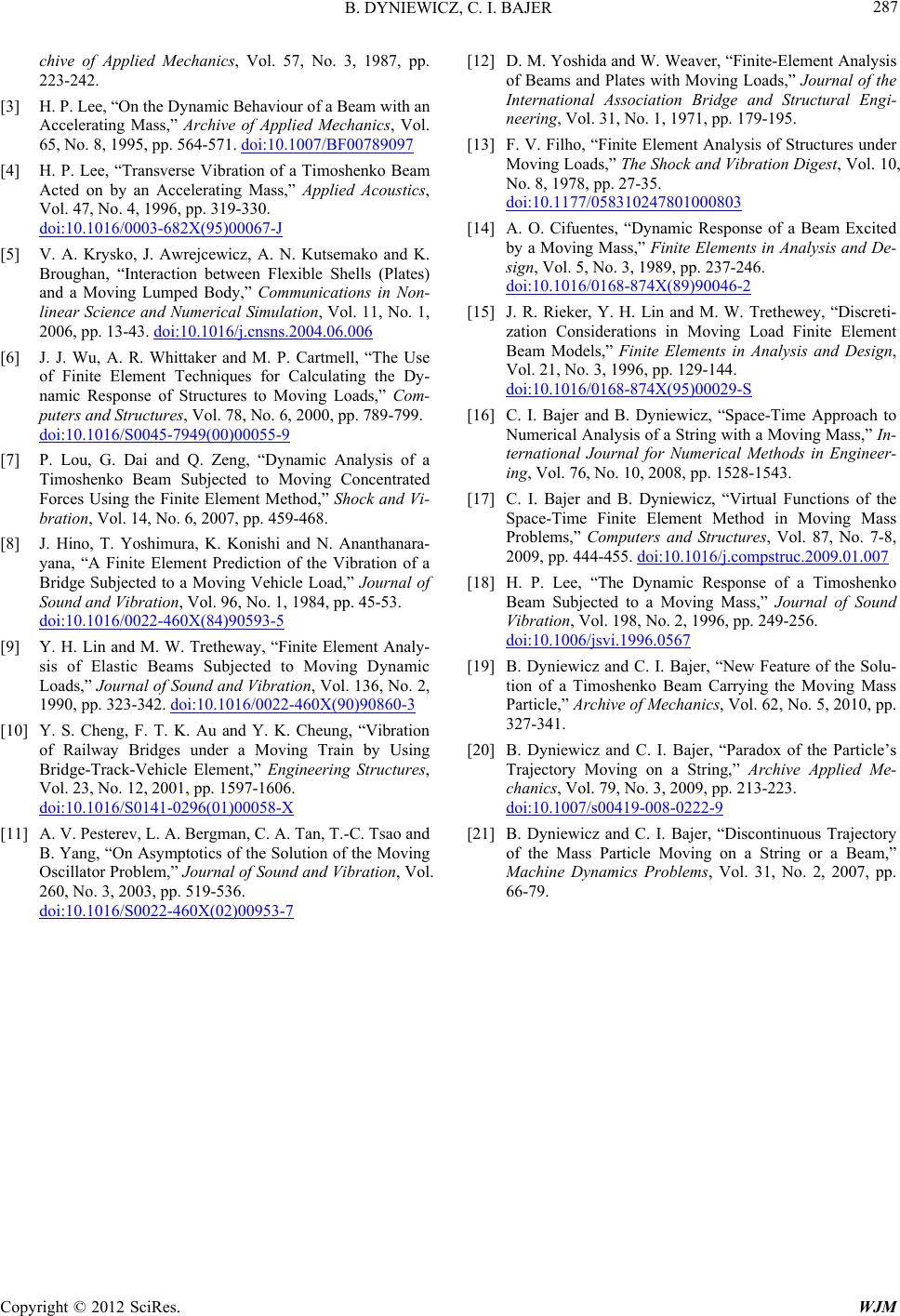 B. DYNIEWICZ, C. I. BAJER Copyright © 2012 SciRes. WJM 287 chive of Applied Mechanics, Vol. 57, No. 3, 1987, pp. 223-242. [3] H. P. Lee, “On the Dynamic Behaviour of a Beam with an Accelerating Mass,” Archive of Applied Mechanics, Vol. 65, No. 8, 1995, pp. 564-571. doi:10.1007/BF00789097 [4] H. P. Lee, “Transverse Vibration of a Timoshenko Beam Acted on by an Accelerating Mass,” Applied Acoustics, Vol. 47, No. 4, 1996, pp. 319-330. doi:10.1016/0003-682X(95)00067-J [5] V. A. Krysko, J. Awrejcewicz, A. N. Kutsemako and K. Broughan, “Interaction between Flexible Shells (Plates) and a Moving Lumped Body,” Communications in Non- linear Science and Numerical Simulation, Vol. 11, No. 1, 2006, pp. 13-43. doi:10.1016/j.cnsns.2004.06.006 [6] J. J. Wu, A. R. Whittaker and M. P. Cartmell, “The Use of Finite Element Techniques for Calculating the Dy- namic Response of Structures to Moving Loads,” Com- puters and Structures, Vol. 78, No. 6, 2000, pp. 789-799. doi:10.1016/S0045-7949(00)00055-9 [7] P. Lou, G. Dai and Q. Zeng, “Dynamic Analysis of a Timoshenko Beam Subjected to Moving Concentrated Forces Using the Finite Element Method,” Shock and Vi- bration, Vol. 14, No. 6, 2007, pp. 459-468. [8] J. Hino, T. Yoshimura, K. Konishi and N. Ananthanara- yana, “A Finite Element Prediction of the Vibration of a Bridge Subjected to a Moving Vehicle Load,” Journal of Sound and Vibration, Vol. 96, No. 1, 1984, pp. 45-53. doi:10.1016/0022-460X(84)90593-5 [9] Y. H. Lin and M. W. Tretheway, “Finite Element Analy- sis of Elastic Beams Subjected to Moving Dynamic Loads,” Journal of Sound and Vibration, Vol. 136, No. 2, 1990, pp. 323-342. doi:10.1016/0022-460X(90)90860-3 [10] Y. S. Cheng, F. T. K. Au and Y. K. Cheung, “Vibration of Railway Bridges under a Moving Train by Using Bridge-Track-Vehicle Element,” Engineering Structures, Vol. 23, No. 12, 2001, pp. 1597-1606. doi:10.1016/S0141-0296(01)00058-X [11] A. V. Pesterev, L. A. Bergman, C. A. Tan, T.-C. Tsao and B. Yang, “On Asymptotics of the Solution of the Moving Oscillator Problem,” Journal of Sound and Vibration, Vol. 260, No. 3, 2003, pp. 519-536. doi:10.1016/S0022-460X(02)00953-7 [12] D. M. Yoshida and W. Weaver, “Finite-Element Analysis of Beams and Plates with Moving Loads,” Journal of the International Association Bridge and Structural Engi- neering, Vol. 31, No. 1, 1971, pp. 179-195. [13] F. V. Filho, “Finite Element Analysis of Structures under Moving Loads,” The Shock and Vibration Digest, Vol. 10, No. 8, 1978, pp. 27-35. doi:10.1177/058310247801000803 [14] A. O. Cifuentes, “Dynamic Response of a Beam Excited by a Moving Mass,” Finite Elements in Analysis and De- sign, Vol. 5, No. 3, 1989, pp. 237-246. doi:10.1016/0168-874X(89)90046-2 [15] J. R. Rieker, Y. H. Lin and M. W. Trethewey, “Discreti- zation Considerations in Moving Load Finite Element Beam Models,” Finite Elements in Analysis and Design, Vol. 21, No. 3, 1996, pp. 129-144. doi:10.1016/0168-874X(95)00029-S [16] C. I. Bajer and B. Dyniewicz, “Space-Time Approach to Numerical Analysis of a String with a Moving Mass,” In- ternational Journal for Numerical Methods in Engineer- ing, Vol. 76, No. 10, 2008, pp. 1528-1543. [17] C. I. Bajer and B. Dyniewicz, “Virtual Functions of the Space-Time Finite Element Method in Moving Mass Problems,” Computers and Structures, Vol. 87, No. 7-8, 2009, pp. 444-455. doi:10.1016/j.compstruc.2009.01.007 [18] H. P. Lee, “The Dynamic Response of a Timoshenko Beam Subjected to a Moving Mass,” Journal of Sound Vibration, Vol. 198, No. 2, 1996, pp. 249-256. doi:10.1006/jsvi.1996.0567 [19] B. Dyniewicz and C. I. Bajer, “New Feature of the Solu- tion of a Timoshenko Beam Carrying the Moving Mass Particle,” Archive of Mechanics, Vol. 62, No. 5, 2010, pp. 327-341. [20] B. Dyniewicz and C. I. Bajer, “Paradox of the Particle’s Trajectory Moving on a String,” Archive Applied Me- chanics, Vol. 79, No. 3, 2009, pp. 213-223. doi:10.1007/s00419-008-0222-9 [21] B. Dyniewicz and C. I. Bajer, “Discontinuous Trajectory of the Mass Particle Moving on a String or a Beam,” Machine Dynamics Problems, Vol. 31, No. 2, 2007, pp. 66-79.
|