Paper Menu >>
Journal Menu >>
 Intelligent Control and Automation, 2010, 1, 48-58 doi:10.4236/ica.201.11006 Published Online August 2010 (http://www.SciRP.org/journal/ica) Copyright © 2010 SciRes. ICA Maximizing of Asymptomatic Stage of Fast Progressive HIV Infected Patient Using Embedding Method Hassan Zarei, Ali Vahidian Kamyad, Sohrab Effati Department of Applied Mathematics, Ferdowsi University of Mashhad, Mashhad, Iran E-mail: zarei2003@yahoo.com Received July 7, 2010; revised July 15, 2010; accepted July 23, 2010 Abstract A system of ordinary differential equations, which describe various aspects of the interaction of HIV with healthy cells in fast progressive patient, is utilized, and an optimal control problem is constructed to prolong survival and delay the progression to AIDS as far as possible, subject to drug costs. Optimal control problem is approximated by linear programming model using measure theoretical approach and suboptimal combina- tions of reverse transcriptase inhibitor (RTI) and protease inhibitor (PI) drug efficacies are proposed. The Comparison of healthy CD4+ T-cells counts, virus particles and immune response, before and after the treatment is introduced. Keywords: HIV Model, Optimal Control, Measure Theory, Linear Programming 1. Introduction Human Immunodeficiency Virus infects CD4+ T-cells, which are an important part of the human immune sys- tem, and other target cells. The infected cells produce a large number of viruses. Medical treatments for HIV have greatly improved during the last two decades. Highly active antiretroviral therapy (HAART) allows for the effective suppression of HIV-infected individuals and prolongs the time before the onset of Acquired Immune Deficiency Syndrome (AIDS) for years or even decades and increase life expectancy and quality to the patient but antiretroviral therapy cannot eradicate HIV from infected patients because of long-lived infected cells and sites within the body where drugs may not achieve effective levels [1-3]. HAART contain two major types of anti-HIV drugs, reverse transcriptase inhibitors (RTI) and protease inhibitors (PI). Reverse transcriptase in- hibitors prevent HIV from infecting cells by blocking the integration of the HIV viral code into the host cell ge- nome. Protease inhibitors prevent infected cells from replication of infectious virus particles, and can reduce and maintain viral load below the limit of detection in many patients. Moreover, treatment with either type of drug can also increase the CD4+ T-cell count that are target cells for HIV. Many of the host–pathogen interaction mechanisms during HIV infection and progression to AIDS are still unknown. Mathematical modeling of HIV infection is of interest to the medical community as no adequate animal models exist in which to test efficacy of drug regimes. These models can test different assumptions and provide new insights into questions that is difficult to answer by clinical or experimental studies. A number of mathe- matical models have been formulated to describe various aspects of the interaction of HIV with healthy cells, See [4]. The basic model of HIV infection is presented by Perelson et al. [5] that contain three state variables healthy CD4+ T-cells, infected CD4+ T-cells and con- centration of free virus. Another model is presented in [6] that although maintaining a simple structure, the model offers important theoretical insights into immune control of the virus based on treatment strategies Furthermore this modified model is developed to describe the natural evolution of HIV infection, as qualitatively described in several clinical studies [7]. Some authors use mathematical model for HIV infec- tion in conjunction with control theory to achieve appro- priate goals, by incorporating the effects of therapy on an HIV-infected individuals. For example, these goals my be maximizing the level of healthy CD4+ T-cells and minimizing the cost of treatment [8-12], maximizing immune response and minimizing both the cost of treat- ment and viral load [13,14], maximizing both the level of healthy CD4+ T-cells and immune response and mini- mizing the cost of treatment [15], Maximizing the level of healthy CD4+ T-cells while minimizing both the side effects and drug resistance [16] and maximizing survival  H. ZAREI ET AL. Copyright © 2010 SciRes. ICA 49 time of patient subject to drug cost [17] and etc. The papers [18-21] consider only RTI medication while the papers [22,23] consider only PIs. In [24-27] all effects of a HAART medication are combined to one control variable in the model. In [13,28-31] dynamical multidrug therapies based on RTIs and PIs are designed. In this paper, we consider a mathematical model of HIV dynamics that includes the effect of antiretroviral therapy, and perform an analysis of optimal control re- garding appropriate goal. The paper is organized as follows. In Section 2, the underlying HIV mathematical model is described. Our formulation of the control problem which attempts to delay appearance of AIDS as far as possible is described in Section 3. Formulated optimal control problem is ap- proximated by linear programming (LP) problem. Re- lated procedure is described in Section 4. Numerical re- sults obtained from using LP model are presented in Sec- tion 5. Finally Section 6 is assigned to concluding re- marks. 2. Presentation of a Working Model In this paper, the pathogenesis of HIV is modeled with a system of ordinary differential equations (ODEs) de- scribed in [7]. This model can be viewed as an extension of basic HIV Models of Perelson et al. [5]. x dx rxv (1) y rxv ayyz (2) wcxywqyw bw (3) zqywhz (4) 1P vkuy v (5) 0 R rru (6) Most of the terms in the model have straightforward interpretations as following: The first equation represents the dynamics of the con- centration of healthy CD4+ T-cells (x). The healthy CD4+ T-cells are produced from a source, such as the thymus, at a constant rate λ, and die at a rate dx. The cells are infected by the virus at a rate rxv. The second equation describes the dynamics of the concentration of infected CD4+ T-cells (y). The infected CD4+ T-cells result from the infection of healthy CD4+ T-cells and die at a rate ay and killed by cytotoxic T-lymphocyte effec- tors CTLe(z) at a rate ρyz. The population of CTLs is subdivided into precursors or CTLp (w), and effectors or CTLe (z). Equations (3)-(4) describe the dynamics of these compartments. In accordance with experimental findings [32] establishment of a lasting CTL response depends on CD4+ T-cell help, and that HIV impairs T helper cell function. Thus, proliferation of the CTLp population is given by cxyw and is proportional to both virus load (y) and the number of uninfected T helper cells (x). CTLp differentiation into effectors occurs at a rate cqyw. Finally, CTLe die at a rate hz. Equation (5) describes the dynamics of the free-virus particles (v). These free-virus particles are produced from infected CD4+ T-cells at a rate ky and are cleared at a rate τv. Model also contain an index of the intrinsic virulence or aggressiveness of the virus (r). This index increases line- arly in the case of an untreated HIV-infected individual, with a growth rate that depends on the constant r0 Finally Equation (6) describes the dynamic of this index. In model variables uP and uR denotes protease inhibitors (PI) and reverse transcriptase inhibitors (RTI), respectively. uR reduces infection rate of healthy CD4+ T-cells by reducing the growth rate of the aggressiveness of the virus (r) and uP prevents virus production by reducing the production rate from infected CD4+ T-cells. The model has several parameters that must be as- signed for numerical simulations. The descriptions, nu- merical values and units of the parameters are summa- rized in Table 1. These descriptions and values were taken from [7]. We note that Equations (1)-(6) with these parameters, model dynamics of fast progressive patients (FPP). 3. Optimal Control Formulation In clinical practice, Anti-retroviral therapy is initiated at t0, the time at which CD4+ T-cell counts reach 350 cells/μl. The transition from HIV to AIDS occurred when patients CD4+ T-cell count falls below 4AIDS CD around 200 cells/μl. Our aim is to propose drug regimen Table 1. Parameter Values for the HIV model. ParametersValue/Unit Description λ 7 cellsµl-1day-1 Healthy CD4+ Production d 7 × 10-3 day-1 Healthy CD4+ clearance a 0.0999 day-1 Infected CD4+ clearance ρ 2 µlcells-1 day-1 Infected CD4+ kill c 5 × 10-6 µl2cells-2day-1 CTLp proliferation q 6 × 10-4 µlcells-1day-1 CTLp differentiation b 0.017 day-1 CTLp clearance h 0.06 day-1 CTLe clearance k 300 copiesml-1cells-1 µlday-1 Virus production τ 0.2 day-1 Virus clearance r0 10-9 copies-1ml day-2 Virulence growth  H. ZAREI ET AL. Copyright © 2010 SciRes. ICA 50 to maximize asymptomatic stage time or equivalently prolong survival and delays the progression to AIDS as far as possible, subject to drug costs. This can be mod- eled as follows: Assume that the onset of AIDS occurs after time f t. Hence we should have: 0 4,4,, f AIDSAIDS f x tCD xtCDttt (7) We follow [8] and [22] in assuming systemic costs of the PI and RTI drugs treatment is proportional to 2() P ut and 2() R ut at time t respectively. Therefore Overall cost of the PI and RTI drugs treatment is 0 2() f P t tutdt and 0 2() f R t tutdt respectively and overall cost of treatment is given by 00 22 () () ff PR tt tt utdt utdt . Because symmetric costs for two types of drugs are in different scale, coeffi- cient σ is set to balance them. Administration of drugs in high dose, are toxic to the human body. Moreover emer- gence of drug resistant strains is one of the basic com- plications in drug treatments. Many authors have ignored drug resistance issues, since fixing a maximum cost for a drug regime is equivalent to only administering a limited amount of chemotherapeutic agent. If that limited amount is chosen to be sufficiently small positive , the risk of drug resistance can be largely ignored. Therefore we impose following constraint on drug cost: 0 22 f PR t tut utdt (8) Setting, (, ,,,,) x ywzvr and ()(,) P R utu u the differential Equations (1)–(6) can be represented in a generalized form as: 1156 156 224 12323 3 23 4 25 0 ,, 1P R d a cqb tgttut qh ku ru (9) Now with respect to above descriptions and (7) and (8) the optimal drug regime problem can be stated as fol- lows: 0 , max f f t t ut dt (10) subject to ,, g tu (11) 0 22 f PR t tut utdt (12) 100 1 ,4 f AIDS ttCD (13) 10 4, , AIDS f tCD ttt (14) We refer to this time optimal control problem as TOCP. Some problems may arise in the quest for the optimal solution. For example, may not exist control function (. )u and corresponding state (.) and final time f t that satisfy in (11)-(14). In order to overcome these difficulties in the next section we transfer the TOCP into a modified problem in measure space. 4. Approximation of TOCP by Linear Programming Model Using the measure theory for solving optimal control problems based on the idea of Young [33], which was applied for the first time by Wilson and Rubio [34], has been theoretically established by Rubio in [35]. Then the method has been extended and improved by Mehne et al. [36] for solving time optimal control problems that leads to approximation of problem by linear programming (LP) model. We shall follow their approach here. 4.1. Transformation to Functional Space We assume that state variable (.) and control input (.)u, get their values in the compact sets 1 AA 6 6 A and 2 12 UUU , respectively. Set 0, f J tt . Definition 4.1.1. We define a triple ,, f pt u to be admissible if the following conditions hold: 1) The vector function (.) be absolutely continuous and belongs to A for all tJ. 2) The function (.)u takes its value in the set U and is Lebesgue measurable on J . 3) p satisfies in the system (11)–(14), i.e. on 0 J , the interior set of J . We assume that the set of all admissible triples is non- empty and denote it by W. Let p be an admissible triple and B be an open ball in 6 containing J A and CB be the space of all real-valued continuous differentiable functions on it. Let CB and define g as follows:  H. ZAREI ET AL. Copyright © 2010 SciRes. ICA 51 6 1 , ,, ,, ,, g j jj dt t ttutdt tt tt gt tutt (15) for each ,(),()ttut , where J AU. The function g is in the space C, the set of all con- tinuous functions on the compact set . Since p ,, f tu is an admissible triple, we have 0 00 ,, ,, f tg t ff ttutdt tt tt (16) for all CB . Let 0 DJ be the space of infi- nitely differentiable all real-valued function with com- pact support in 0 J . Define: 0 ,,,,, 1,, 6 j jj ttutt tgttutt jDJ (17) Then if ,, f pt u be an admissible triple for 1,, 6,j and 0 DJ , from (17) we have 00 0 0 0 ,, ,, | ,, ff f f f tt j j tt tt jj t t t j j t ttutdtt tdt g ttuttdtt t gt tutttdt since the function (.) has compact support in 0 J , so 00 f tt and j j g so 0 ,, 0 f tj tttutdt (18) Also by choosing the functions which are dependent only on time, we have: 0 1 ,, , f t tttutdta C (19) where 1 C is the space of all functions in C that depend only on time and a is the integral of on J . Equations (16), (18) and (19) are really weak form of (11), (13) and (14). We note that, the role of constraint (13) is considered on the right side of equation (16) by considering functions CB which are monomials of 1 . Furthermore, the constraint (14) is considered, by choosing appropriate set A . Now we consider the following positive linear functional on C . :,,, pJ FFttutdtFC (20) Proposition 4.1.1. Transformation p p of ad- missible triples in W into the linear mappings p defined in (20) is an injection. Proof. We must show that if 12 pp, then 12 p p . Let ,, ,1,2 j jfjj pt uj be different admissible triples. If 12 f f tt , then there is a subinterval of 1 0,f tt , say 1 J , where 12 () ()tt for each 1 tJ . A continuous function F can be constructed on so that the right-hand side of (20) corresponding to 1 p and 2 p are not equal. For instance, assume F is independent of u such that for all 1 tJ , this function is positive on the appropriate portion of the graph of 1()t , and zero on 2()t , then the linear functional are not equal. In other word if 12 f f tt , then 1 p and 2 p have dif- ferent domains and are not equal. Thus, the TOCP (10)-(14) is converted to following optimization problem in functional space: 1 p p Maximi ze (from (10)) (21) Subject to , g pCB (from (16)) (22) 0 0, 1,...,6, j pjDJ (from (18)) (23) 1 , paC (from (19)) (24) pH (from (12)) (25) where 22 ,, pR H ttut utut . 4.2. Transformation to Measure Space Let M denotes the space of all positive Radon measures on . By the Riesz representation theorem, there exists a unique positive Radon measure on such that: ,, ,, , pJ FFttutdt FtudFF C (26) So, we may change the space of optimization problem  H. ZAREI ET AL. Copyright © 2010 SciRes. ICA 52 to measure spaces. In other words, the optimization prob- lem in functional space (21)-(25) can be replaced by the following new problem in measure space: Maximize 1 M (27) Subject to , gCB (28) 0 0, 1,...,6, jjDJ (29) 1 ,aC (30) H (31) We shall consider the maximization of (27) over the set Q of all positive Radon measures on satisfying (28)-(31). The main advantages of considering this measure theoretic from of the problem is the existence of an optimal measure in the set Q which this point can be studied in a straightforward manner without having to impose conditions such as convexity which may be arti- ficial. Theorem 4.2.1. The measure theoretical problem of maximizing (27) with equality and inequality constraints (28)-(31) has an optimal solution . Proof. As we will show in the next, (29) and (30) are special version of (28). Therefore, the set Q can be writ- ten as 12 QQ Q where 1:g CB QM and 2:QM H . Assume that ,, f pt u is an admissible triple. It is well known that, the set 0 :1 f M tt is compact in weak*-topology. Furthermore, 1 Q as inter- section of inverse image of closed singleton sets under continuous functions g is also closed. It can be shown in a similar way that 2 Q is closed. Thus, Q is a closed subset of a compact set. This proves the compactness of the set Q. Since the functional 1 mapping the compact set Q on the real line, is continuous and so has a maximum on the compact set Q. Next, based on analysis in [35], the problem (27)-(31) is approximated by a LP problem and a triple p* which approximate the action of Q is achieved. 4.3. Approximation Problem (27)-(31) is an infinite dimensional linear pro- gramming problem and all the functions in (28)-(31) are linear with respect to measure . Of course, it is an infinite dimensional LP problem, because M is infinite dimensional space. It is possible to approximate the solution of this problem by the solution of a finite- dimensional LP of sufficiently large dimension. Also, from the solution of this new finite dimensional LP we induce an approximated admissible triple in a suitable manner. We shall first develop an intermediate problem, still infinite-dimensional by considering the maximiza- tion (27), not over the set Q but over a subset of M with only a finite numbers of the constraints in (28)–(31) being satisfied. This will be achieved by choosing countable sets of functions whose linear com- binations are dense in the sets CB , 1 C and 0 DJ , and then selecting a finite number of them. As- sume the set :1,2,... ii be such that the linear combinations of the functions iCB are uni- formly dense in CB . For instance, these functions can be taken to be monomials in t and the components of the vector . As we will show in the next, some of these monomials are suitable for our problem and are as fol- lows: 11 and ,0,1,1,2,..., 2,3, 4,5, 6 ij ji h tij h (32) Let set :1,2,... ii be such that linear combina- tions of the functions 0 iDJ are uniformly dense in 0 DJ . For r = 1, 2, … some of these functions can be taken as follows [36]: 0 21 2 sin 0 l r rt ttt tT otherwise and 0 2 2 1cos 0 l r rt ttt tT otherewise (33) where 0l Ttt and l t is a lower bound for optimal time which can be obtained using controllability. Finally, let set :1,2,... ii be such that linear combinations of the functions 1 iC are uni-  H. ZAREI ET AL. Copyright © 2010 SciRes. ICA 53 formly dense in 1 C. These functions can be consid- ered monomials in t as follows: (),0,1,2... s stts (34) Remark 1. With respect to (15) and (17) it can be seen that (29) and (30) are also achieved from (28) by setting ,j ttt t and 0 ,t tt d re- spectively. The first approximation will be completed by using above subjects and the following propositions. Proposition 4.3.1. Consider the linear program con- sisting of the maximizing function 1 over the set M Q of measures in M satisfying: ,1,, g ii iM H Then max (1) M MQ tends to max (1) Q as M →∞. Proof. We have 12M QQ QQ ; hence, 12 . M Therefore, {} n is non increasing and bounded sequence then converges to a number such that . We show that, . Set 1 M M RQ . Then, RQ and max (1) R . It is sufficient to show RQ. Assume R and ()CB . Since Linear combinations of the functions ,1,2,... jj are uniformly dense in CB , there is the Sequence ,1,2,... kj span j such that k tends to uniformly as k→∞. Hence, 1 S, 2 S and 3 S tend to zero as k→∞ where 1sup k S , 2sup t tk S and 3sup k S . We have R , and functional f f is linear. Therefore, g kk and 123 ,,,, ,, ,, 2 t ggg kk k tk k ttgtu ttd SgtudSd S Since the right-hand side of the above inequality tends to zero as k→∞, while left-hand side is independent of k, therefore () g . Thus RQ and which implies . Proposition 4.3.2. The measure in the set M Q at which the functional (1) attains its maximum has the form 1 1 () M j j j z (35) where 0, jj z and )(z is unitary atomic meas- ure with the support being the singleton set {} j z , charac- terized by()( )(),zFFz z . Proof. See appendix of [35]. Therefore, with respect to above descriptions we re- strict our attention to finding measure in form 1 1() M j j jz , which maximizes functional 1 and satisfies in (31) and M number of constraints in the form of (28)-(30). Clearly, 1 1 ()( ), M jj j F FzF ()C . Therefore, by choosing 1 M number of functions in the form of (32), S number of functions in the form of (34) and 2 M number of functions in the form of (33), which leads to 22 6 M M number of functions of the type (17) where are numbered sequentially as , h 2 1,...,hM , infinite dimensional problem (27)-(31) is approximated with following finite dimensional nonlin- ear programming (NLP) problem: 1 0, 1 Maximize jj M j zM j (36) Subject to 1 1 1 , 1,..., Mg ji ji j ziM (37) 1 2 1 0, 1,..., M jh j j zhM (38) 1 1 ,1,, M js j j zas S (39) 1 1 M jj j Hz (40) where, 12 M MM S . We confront with NLP with more than 2( 1)M unknowns j , ,1,...,1 j zj M. Finally, the following proposition enables us to approxi- mate the problem via the finite dimensional linear pro- gramming problem. Proposition 4.3.3. Let 12 , ,..., N N y yy be a cou- ntable dense subset of , for any N sufficiently large number. Given 0 , a measure ()vM can be  H. ZAREI ET AL. Copyright © 2010 SciRes. ICA 54 found such that: 1 1,..., gg ii viM (41) 2 1,..., hh vhM (42) 1,..., ss vsS (43) vH H (44) where measure v has the form 1 1 M jj j vz (45) where the coefficients ,1,...,1 jjM are the same as optimal measure (35), and zj ΩN, j = 1,…, M + 1. Proof. We rename functions g i ’s, h ’s, s v’s and H sequentially as ,1,2,..., 1 j fj M. Then, for j = 1,…, M + 1, 1 1 1 , 1 max M jijiji i M ijiji ij i vff zf z fz fz . j f ’s are continues. Therefore, , max ij can be made less than 1 1 M j j by choosing ,1,2,..., 1 i zi M, suffi- ciently near to i z. For construction of dense subset N , J is divided to S subintervals as follows: 00 1,,1,2,...,1 11 s sTsT Jtts S SS and , Slf J tt (46) Furthermore, intervals Ai’s and Uj’s are divided into ni and mj subintervals respectively, then the set Ω is divided into N = Sn1 n2 n3 n4 n5 m1 m2 cells. One point is chosen from each cell. In this way we will have a grid of points, which are numbered sequentially as j y1 (, ,..., j j t 6,, ) j jj PR uu , j = 1,…, N. Remark 2. It is well known that each function type (34) can be approximated in a nice way by a linear com- bination of characteristic function of subintervals of J. In practice we consider ()(), 1,..., s sJ ttsS instead of functions of the type (34), where s J ’s are given by (46) and s J denotes the characteristic function of s J . The main reason for this choice of s ’s is related to their essential role in construction of control functions. For more details see [35,36]. Considering (45) the NLP (36)-(40) is converted to the following LP: 01 Maximize j N j j (47) subject to 1 1 , 1,..., Ng ji ji j yiM (48) 2 1 0, 1,..., N jh j j yhM (49) 1 N jj j Hy (50) 1 1 21 11 1 1 l j j Sl j jSl Sl j fl jS l T S T S tt (51) , 2,3,4,5,6 if i tAi (52) where N lS . Of course, we need only to construct the function (.)u, since the (.) is simply the corresponding solution of differential Equations (1)-(6) which can be estimated numericall. Using simplex method, nonzero optimal solution 12 ,,, p ii i , 12 p ii i of LP (47)-(52) can be found where p cannot exceed the num- ber of constraints i.e., 12 1pM MS . Setting 00it , piecewise control pair () () P utu t, () R ut which approximate the action of the optimal con- trol, is constructed based on these nonzero coefficients as follows [35,36]: 1 00 ,, ,1,2,..., 0 iii i jjh h jj PR hh uu t utj p otherewise It should be remembered, i j P u and i j R u are respec- tively 7th and 8th components of j i y.  H. ZAREI ET AL. Copyright © 2010 SciRes. ICA 55 5. Numerical Results In our implementation, we set 114M and chosen func- tions from CB are as follows: 11 22 12 3 4 5 611213141516 ,,,,,,,,, ,, ,,tt Furthermore, we set 22M. Hence, we have 212M number of functions in the form of (17). Parameter S is set to 11 and desired lower bound for optimal time is set to 2007.5(5.5) l t years. Setting (0,0)u, and solv- ing ODE (1)-(6) using 4th order Runge-Kutta method, shows that at 0620t, 0(350,12.40,1.26,0.16,t 18454) . Starting points of our simulation runs are: x(0) = 103 cellsµl-1, v(0) = 104 copiesml-1, y(0) = 0 cellsµl-1, w(0) = 10-3 cellsml-1, z(0) = 10-7cellsµl-1 and r(0) = 2 × 10-7 mlcopies-1day-1. Maximum values for uP and uR, are 0.7 and 9 × 10-10 respectively [7]. Therefore, the coefficient for balanc- ing both PI and RTI costs in (8) is set to 2 -10 0.7 910 . Furthermore, the total costs are bounded above by 480 . By using controllability, considered ranges for states and controls and corresponding parti- tions for construction of yj, j=1,…, N are summarized in Table 2. Note that, selected values from the set U1 for construction of yj’s are 0, 0.4 and 0.7. These values indi- cate off, moderate and strong PI-therapy. Similarly, cor- responding values for RTI control are 0, 5 × 10-10 and 9 × 10-10 [7]. Therefore, we have linear programming with M = 33 constraints and N = 59405 unknowns, that is solved using simplex method and environment of MAT- LAB. Implementing the corresponding LP model, the sub- optimal time has been found 2133.2 (71.11) f tMonths . Figure 1 shows the resulting suboptimal control pair. The response of the system to the control functions is depicted in Figure 2. Figure 2(a) shows that condition (14) violates in a subinterval of J, which is due to ap- proximate nature of control pair and can be ignored. Be- cause, the length of this subinterval is very small as compared to the length of J. We found 1( )199.28 f t , which is close to exact value i.e., 200. From Figures 2(a) and 2(b), we see drop in the number of CD4+ T-cells, and a rise in viral load following the initial infection until about the third month. After this time, CD4+ T-cells start recovering and virus starts decreasing due to the immune response, but can never eradicate virus completely. Then CD4+ T-cells level decreases and viral load increases due to de struction of immune system in absence of treatment. Figures 2(b) and 2(c) show a clear correlation between the CTLe and virus population. As the virus increases upon initial infection, CTLe increases in order to decrease the virus. Once this is accomplished, virus decreases. Then virus grows back slowly, and this trig- gers an increase in the CTLe population. CTLe, further increases in an attempt to keep the virus at constant lev- els but lose the battle because of virus-induced impair- ment of CD4+ T-cell function, in absence of treatment (dotted line). Memory CTL responses depend on the Table 2. Considered ranges for states and controls and cor- responding number of partitions. State Range Number of partitions 1 A1 = [200, 1000] n 1 = 5 2 A2 = [5, 30] n 2 = 3 3 A3 = [0, 1.6] n 3 = 2 4 A4 = [0, 1.3] n 4 = 2 5 A5 = [500, 35000] n 5 = 10 6 A6 = [0, 2 × 10-7] n 6 = 1 P u U1 = [0, 0.7] m 1 = 3 R u U2 = [0, 9 × 10-10] m 2 = 3 Figure 1. The suboptimal piecewise constant control pair (.) P u and (.) R u. 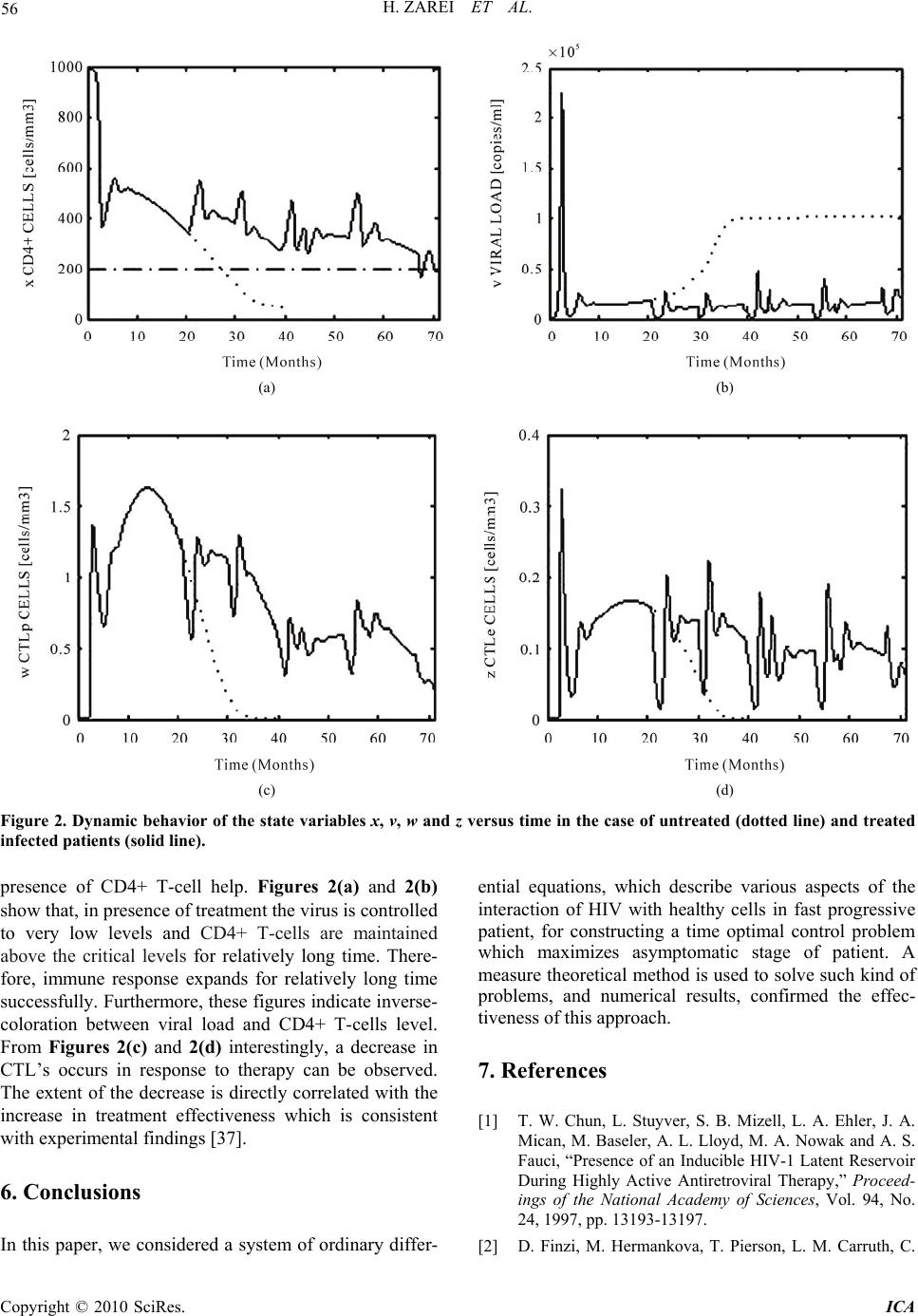 H. ZAREI ET AL. Copyright © 2010 SciRes. ICA 56 (a) (b) (c) (d) Figure 2. Dynamic behavior of the state variables x, v, w and z versus time in the case of untreated (dotted line) and treated infected patients (solid line). presence of CD4+ T-cell help. Figures 2(a) and 2(b) show that, in presence of treatment the virus is controlled to very low levels and CD4+ T-cells are maintained above the critical levels for relatively long time. There- fore, immune response expands for relatively long time successfully. Furthermore, these figures indicate inverse- coloration between viral load and CD4+ T-cells level. From Figures 2(c) and 2(d) interestingly, a decrease in CTL’s occurs in response to therapy can be observed. The extent of the decrease is directly correlated with the increase in treatment effectiveness which is consistent with experimental findings [37]. 6. Conclusions In this paper, we considered a system of ordinary differ- ential equations, which describe various aspects of the interaction of HIV with healthy cells in fast progressive patient, for constructing a time optimal control problem which maximizes asymptomatic stage of patient. A measure theoretical method is used to solve such kind of problems, and numerical results, confirmed the effec- tiveness of this approach. 7. References [1] T. W. Chun, L. Stuyver, S. B. Mizell, L. A. Ehler, J. A. Mican, M. Baseler, A. L. Lloyd, M. A. Nowak and A. S. Fauci, “Presence of an Inducible HIV-1 Latent Reservoir During Highly Active Antiretroviral Therapy,” Proceed- ings of the National Academy of Sciences, Vol. 94, No. 24, 1997, pp. 13193-13197. [2] D. Finzi, M. Hermankova, T. Pierson, L. M. Carruth, C.  H. ZAREI ET AL. Copyright © 2010 SciRes. ICA 57 Buck, R. E. Chaisson, T. C. Quinn, K. Chadwick, J. Margolick, R. Brookmeyer, et al., “Identification of a Reservoir for HIV-1 in Patients on Highly Active Anti- retroviral Therapy,” Sci ence , Vol. 278, No. 5341, 1997, pp. 1295-1300 [3] J. K. Wong, M. Hezareh, H. F. Gunthard, D. V. Havlir, C. C. Ignacio, C. A. Spina and D. D. Richman, “Recovery of Replication-Competent HIV Despite Prolonged Suppres- sion of Plasma Viremia,” Scienc e, Vol. 278, No. 5341, 1997, pp. 1291-1295. [4] M. M. Hadjiandreou, R. Conejeros and V. S. Vassiliadis, “Towards a Long-Term Model Construction for the Dy- namic Simulation of HIV Infection,” Mathematical Bio- sciences and Engineering, Vol. 4, No. 3, 2007, pp. 489- 504. [5] A. S. Perelson, A. U. Neumann, M. Markowitz, et al., “HIV-1 Dynamics in Vivo: Virion Clearance Rate, In- fected Cell Life-Span, and Viral Generation Time,” Sci- ence, Vol. 271, No. 5255, 1996, pp. 1582-1586. [6] D. Wodarz and M. A. Nowak, “Specific Therapy Re- gimes Could Lead to Long-Term Immunological Control of HIV,” Proceedings of the National Academy of Sci- ences, Vol. 96, No. 6, 1999, pp. 14464-14469. [7] A. Landi, A. Mazzoldi, C. Andreoni, M. Bianchi, A. Cavallini, M. Laurino, L. Ricotti, R. Iuliano, B. Matteoli and L. Ceccherini-Nelli, “Modelling and Control of HIV Dynamics,” Computer Methods and Programs in Bio- medicine, Vol. 89, No. 2, 2008, pp. 162-168. [8] K. R. Fister, S. Lenhart and J. S. McNally, “Optimizing Chemotherapy in an HIV Model,” Electronic Journal of Differential Equations, Vol. 1998, No. 32, 1998, pp. 1- 12. [9] M. M. Hadjiandreou, R. Conejeros and D. I. Wilson, “Long-Term HIV Dynamics Subject to Continuous The- rapy and Structured Treatment Interruptions,” Chemical Engineering Science, Vol. 64, No. 7, 2009, pp. 1600- 1617. [10] W. Garira, D. S. Musekwa and T. Shiri, “Optimal Control of Combined Therapy in a Single Strain HIV-1 Model,” Electronic Journal of Differential Equations, Vol. 2005, No. 52, 2005, pp. 1-22. [11] J. Karrakchou, M. Rachik and S. Gourari, “Optimal Con- trol and Infectiology: Application to an HIV/AIDS Model,” Journal of Applied Mathematics and Computing, Vol. 177, No. 2, 2006, pp. 807-818. [12] A. Heydari, M. H. Farahi and A. A. Heydari, “Chemo- therapy in an HIV Model by a Pair of Optimal Control,” Proceedings of the 7th WSEAS International Conference on Simulation, Modelling and Optimization, Beijing, 2007, pp. 58-63. [13] B. M. Adams, H. T. Banks, H. D. Kwon and H. T. Tran, “Dynamic Multidrug Therapies for HIV: Optimal and STI Control Approaches,” Mathematical Biosciences and Engineering, Vol. 1, No. 2, 2004, pp. 223-241. [14] F. Neri, J. Toivanen and R. A. E. Mäkinen, “An Adaptive Evolutionary Algorithm with Intelligent Mutation Local Searchers for Designing Multidrug Therapies for HIV,” Applied Intelligence, Vol. 27, No. 3, 2007, pp. 219-235. [15] R. Culshaw, S. Ruan and R. J. Spiteri, “Optimal HIV Treatment by Maximizing Immune Response,” Journal of Mathematical Biology, Vol. 48, No. 5, 2004, pp. 545-562. [16] O. Krakovska and L. M. Wahl, “Costs Versus Benefits: Best Possible and Best Practical Treatment Regimens for HIV,” Journal of Mathematical Biology, Vol. 54, No. 3, 2007, pp. 385-406. [17] C. D. Myburgh and K. H. Wong, “An Optimal Control Approach to Therapeutic Intervention in HIV Infected Individuals,” Proceedings of the Third International Con- ference on Control Theory and Applications, Pretoria, South Africa, 2001. [18] B. M. Adams, H. T. Banks, M. Davidian, H. D. Kwon, H. T. Tran, S. N. Wynne and E. S. Rosenberg, “HIV Dy- namics: Modeling, Data Analysis, and Optimal Treatment Protocols,” Journal of Computational and Applied Math- ematics, Vol. 184, No. 1, 2005, pp. 10-49. [19] J. Alvarez-Ramirez, M. Meraz and J. X. Velasco-Her- nandez, “Feedback Control of the Chemotherapy of HIV,” International Journal of Bifurcation and Chaos, Vol. 10, No. 9, 2000, pp. 2207-2219. [20] S. Butler, D. Kirschner and S. Lenhart, “Optimal Control of Chemotherapy Affecting the Infectivity of HIV,” In: O. Arino, D. Axelrod, M. Kimmel and M. Langlais, Eds., Advances in Mathematical Population Dynamics: Mole- cules, Cells, Man, World Scientific, Singapore, pp.104- 120. [21] H. Shim, S. J. Han, C. C. Chung, S. Nam and J. H. Seo, “Optimal Scheduling of Drug Treatment for HIV Infec- tion: Continuous dose Control and Receding Horizon Control,” International Journal of Control, Automation, and Systems, Vol. 1, No. 3, 2003, pp. 401-407. [22] D. Kirschner, S. Lenhart and S. Serbin, “Optimal Control of the Chemotherapy of HIV Infection: Scheduling, Amounts and Initiation of Treatment,” Journal of Mathematical Biology, Vol. 35, No. 7, 1997, pp. 775-792. [23] U. Ledzewicz and H. Schättler, “On Optimal Controls for a General Mathematical Model for Chemotherapy of HIV,” Proceedings of the 2002 American Control Con- ference, Anchorage, Vol. 5, 2002, pp. 3454-3459. [24] R. Zurakowski, M. J. Messina, S. E. Tuna and A. R. Teel, “HIV Treatment Scheduling Via Robust Nonlinear Model Predictive Control,” Proceedings of the 5th Asian Control Conference, Melbourne, Vol. 1, 2004, pp. 25-32. [25] R. Zurakowski and A. R. Teel, “Enhancing Immune Re- sponse to HIV Infection Using MPC-Based Treatment Scheduling,” Proceedings of the 2003 American Control Conference, Denver, Vol. 2, 2003, pp. 1182-1187. [26] R. Zurakowski, A. R. Teel and D. Wodarz, “Utilizing Alternate Target Cells in Treating HIV Infection through Scheduled Treatment Interruptions,” Proceedings of the 2004 American Control Conference, Melbourne, Vol. 1, 2004, pp. 946-951. [27] R. Zurakowski and A. R. Teel, “A Model Predictive Con- trol Based Scheduling Method for HIV Therapy,” Jour- nal of Theoretical Biology, Vol. 238, No. 2, 2006, pp. 368-382. [28] H. T. Banks, H. D. Kwon, J. Toivanen and H. T. Tran,  H. ZAREI ET AL. Copyright © 2010 SciRes. ICA 58 “An State Dependent Riccati Equation Based Estimator Approach for HIV Feedback Control,” Optimal Control Applications and Methods, Vol. 27, No. 2, 2006, pp. 93- 121. [29] M. A. L. Caetano and T. Yoneyama, “Short and Long Period Optimization of Drug Doses in the Treatment of AIDS,” Anais da Academia Brasileira de Ciências, Vol. 74, No. 3, 2002, pp. 379-392. [30] A. M. Jeffrey, X. Xia and I. K. Craig, “When to Initiate HIV Therapy: A Control Theoretic Approach,” IEEE Transactions on Biomedical Engineering, Vol. 50, No. 11, 2003, pp. 1213-1220. [31] J. J. Kutch, P. Gurfil, “Optimal Control of HIV Infection with a Continuously-Mutating Viral Population,” Pro- ceedings of the 2002 American Control Conference, An- chorage, Vol. 5, 2002, pp. 4033-4038. [32] P. Borrow, A. Tishon, S. Lee, J. Xu, I. S. Grewal, M. B. Oldstone and R. A. Flavell, “CD40L-Deficient Mice Show Deficits in Antiviral Immunity and Have an Im- Paired Memory CD8 CTL,” Journal of Experimental Medicine, Vol. 183, No. 5, 1996, pp. 2129-2142. [33] C. Young, “Calculus of Variations and Optimal Control Theory,” Sunders, Philadelphia, 1969. [34] D. A. Wilson and J. E. Rubio, “Existence of Optimal Controls for the Diffusion Equation,” Journal of Optimi- zation Theory and Applications, Vol. 22, 1977, pp. 91- 101. [35] J. E. Rubio, “Control and Optimization: The Linear Treatment of Non-linear Problems,” Manchester Univer- sity Press, Manchester, 1986. [36] H. H. Mehne, M. H. Farahi and A. V. Kamyad, “MILP Modelling for the Time Optimal Control Problem in The Case of Multiple Targets,” Optimal Control Applications and Methods, Vol. 27, No. 2, 2005, pp. 77-91. [37] X. Jin, et al., “An Antigenic Threshold for Maintaining Human Immunodeficiency Virus Type 1-Specific Cyto- toxic T Lymphocytes,” Molecular Medicine, Vol. 6, 2000, pp. 803-809. |