Comparison between Neural Network and Adaptive Neuro-Fuzzy Inference System for
Forecasting Chaotic Traffic Volumes
253
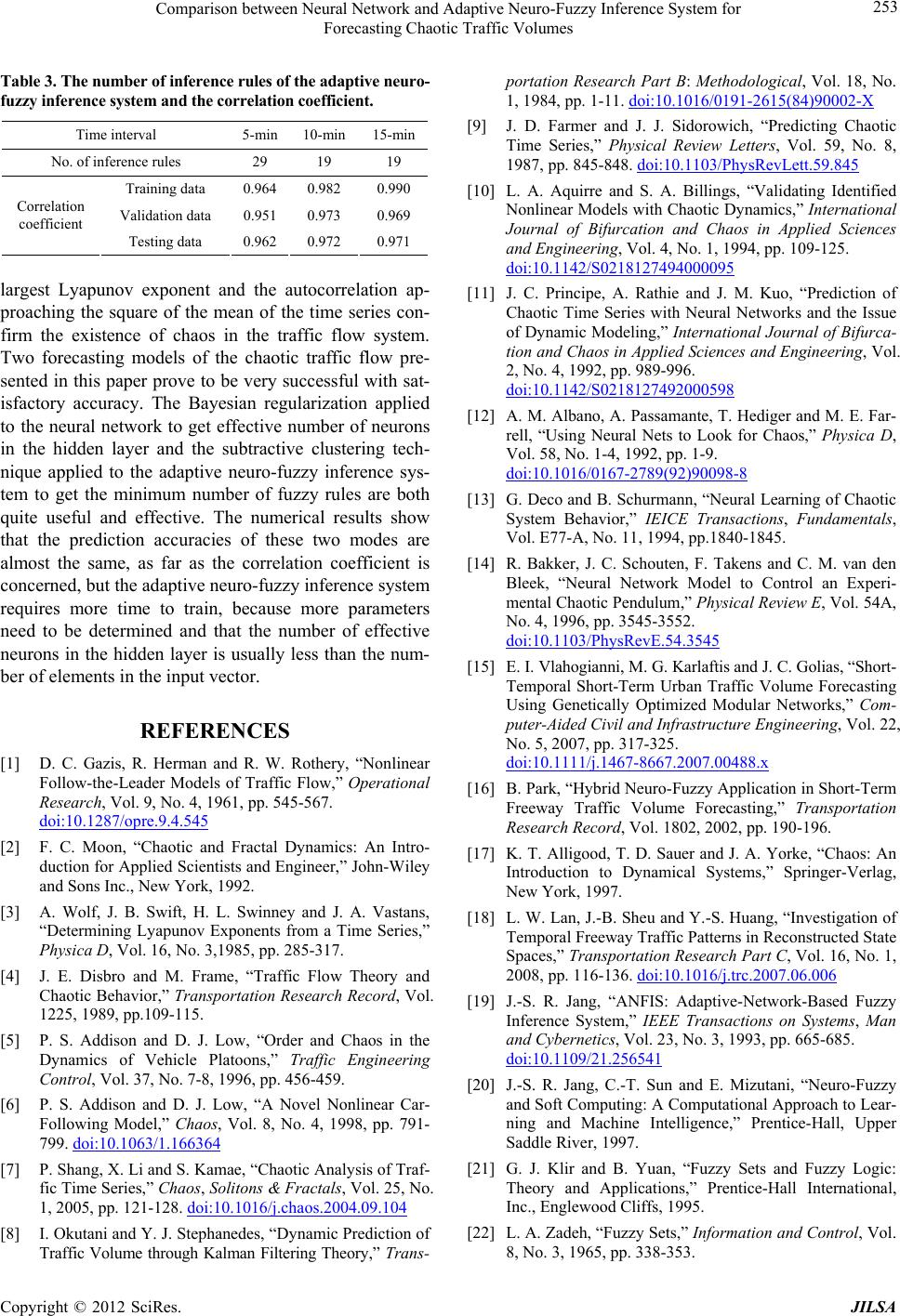
Table 3. The number of inference rules of th e ad ap tive neuro-
fuzzy inference system and the correlation coefficient.
Time interval 5-min 10-min 15-min
No. of inference rules 29 19 19
Training data 0.964 0.982 0.990
Validation data 0.951 0.973 0.969
Correlation
coefficient
Testing data 0.962 0.972 0.971
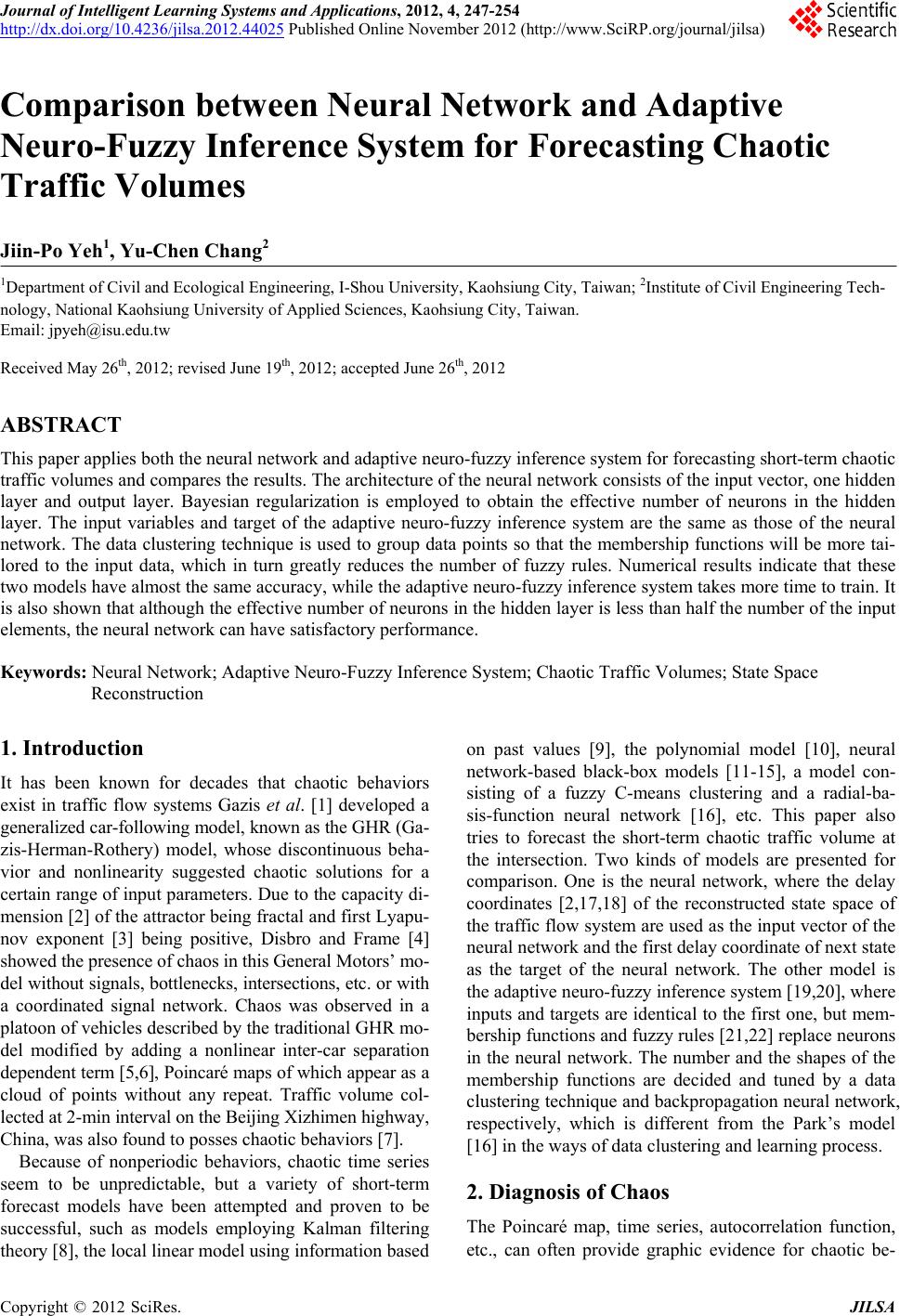
largest Lyapunov exponent and the autocorrelation ap-
proaching the square of the mean of the time series con-
firm the existence of chaos in the traffic flow system.
Two forecasting models of the chaotic traffic flow pre-
sented in this paper prove to be very successful with sat-
isfactory accuracy. The Bayesian regularization applied
to the neural network to get effective number of neurons
in the hidden layer and the subtractive clustering tech-
nique applied to the adaptive neuro-fuzzy inference sys-
tem to get the minimum number of fuzzy rules are both
quite useful and effective. The numerical results show
that the prediction accuracies of these two modes are
almost the same, as far as the correlation coefficient is
concerned, but the adaptive neuro-fuzzy inference system
requires more time to train, because more parameters
need to be determined and that the number of effective
neurons in the hidden layer is usually less than the num-
ber of elements in the input vector.
REFERENCES
[1] D. C. Gazis, R. Herman and R. W. Rothery, “Nonlinear
Follow-the-Leader Models of Traffic Flow,” Operational
Research, Vol. 9, No. 4, 1961, pp. 545-567.
doi:10.1287/opre.9.4.545
[2] F. C. Moon, “Chaotic and Fractal Dynamics: An Intro-
duction for Applied Scientists and Engineer,” John-Wiley
and Sons Inc., New York, 1992.
[3] A. Wolf, J. B. Swift, H. L. Swinney and J. A. Vastans,
“Determining Lyapunov Exponents from a Time Series,”
Physica D, Vol. 16, No. 3,1985, pp. 285-317.
[4] J. E. Disbro and M. Frame, “Traffic Flow Theory and
Chaotic Behavior,” Transportation Research Record, Vol.
1225, 1989, pp.109-115.
[5] P. S. Addison and D. J. Low, “Order and Chaos in the
Dynamics of Vehicle Platoons,” Traffic Engineering
Control, Vol. 37, No. 7-8, 1996, pp. 456-459.
[6] P. S. Addison and D. J. Low, “A Novel Nonlinear Car-
Following Model,” Chaos, Vol. 8, No. 4, 1998, pp. 791-
799. doi:10.1063/1.166364
[7] P. Shang, X. Li and S. Kamae, “Chaotic Analysis of Traf-
fic Time Series,” Chaos, Solitons & Fractals, Vol. 25, No.
1, 2005, pp. 121-128. doi:10.1016/j.chaos.2004.09.104
[8] I. Okutani and Y. J. Stephanedes, “Dynamic Prediction of
Traffic Volume through Kalman Filtering Theory,” Trans-
portation Research Part B: Methodological, Vol. 18, No.
1, 1984, pp. 1-11. doi:10.1016/0191-2615(84)90002-X
[9] J. D. Farmer and J. J. Sidorowich, “Predicting Chaotic
Time Series,” Physical Review Letters, Vol. 59, No. 8,
1987, pp. 845-848. doi:10.1103/PhysRevLett.59.845
[10] L. A. Aquirre and S. A. Billings, “Validating Identified
Nonlinear Models with Chaotic Dynamics,” International
Journal of Bifurcation and Chaos in Applied Sciences
and Engineering, Vol. 4, No. 1, 1994, pp. 109-125.
doi:10.1142/S0218127494000095
[11] J. C. Principe, A. Rathie and J. M. Kuo, “Prediction of
Chaotic Time Series with Neural Networks and the Issue
of Dynamic Modeling,” International Journal of Bifurca-
tion and Chaos in Applied Sciences and Engineering, Vol.
2, No. 4, 1992, pp. 989-996.
doi:10.1142/S0218127492000598
[12] A. M. Albano, A. Passamante, T. Hediger and M. E. Far-
rell, “Using Neural Nets to Look for Chaos,” Physica D,
Vol. 58, No. 1-4, 1992, pp. 1-9.
doi:10.1016/0167-2789(92)90098-8
[13] G. Deco and B. Schurmann, “Neural Learning of Chaotic
System Behavior,” IEICE Transactions, Fundamentals,
Vol. E77-A, No. 11, 1994, pp.1840-1845.
[14] R. Bakker, J. C. Schouten, F. Takens and C. M. van den
Bleek, “Neural Network Model to Control an Experi-
mental Chaotic Pendulum,” Physical Review E, Vol. 54A,
No. 4, 1996, pp. 3545-3552.
doi:10.1103/PhysRevE.54.3545
[15] E. I. Vlahogianni, M. G. Karlaftis and J. C. Golias, “Short-
Temporal Short-Term Urban Traffic Volume Forecasting
Using Genetically Optimized Modular Networks,” Com-
puter-Aided Civil and Infrastructure Engineering, Vol. 22,
No. 5, 2007, pp. 317-325.
doi:10.1111/j.1467-8667.2007.00488.x
[16] B. Park, “Hybrid Neuro-Fuzzy Application in Short-Term
Freeway Traffic Volume Forecasting,” Transportation
Research Record, Vol. 1802, 2002, pp. 190-196.
[17] K. T. Alligood, T. D. Sauer and J. A. Yorke, “Chaos: An
Introduction to Dynamical Systems,” Springer-Verlag,
New York, 1997.
[18] L. W. Lan, J.-B. Sheu and Y.-S. Huang, “Investigation of
Temporal Freeway Traffic Patterns in Reconstructed State
Spaces,” Transportation Research Part C, Vol. 16, No. 1,
2008, pp. 116-136. doi:10.1016/j.trc.2007.06.006
[19] J.-S. R. Jang, “ANFIS: Adaptive-Network-Based Fuzzy
Inference System,” IEEE Transactions on Systems, Man
and Cybernetics, Vol. 23, No. 3, 1993, pp. 665-685.
doi:10.1109/21.256541
[20] J.-S. R. Jang, C.-T. Sun and E. Mizutani, “Neuro-Fuzzy
and Soft Computing: A Computational Approach to Lear-
ning and Machine Intelligence,” Prentice-Hall, Upper
Saddle River, 1997.
[21] G. J. Klir and B. Yuan, “Fuzzy Sets and Fuzzy Logic:
Theory and Applications,” Prentice-Hall International,
Inc., Englewood Cliffs, 1995.
[22] L. A. Zadeh, “Fuzzy Sets,” Information and Control, Vol.
8, No. 3, 1965, pp. 338-353.
Copyright © 2012 SciRes. JILSA