 J. Software Engineering & Applications, 2010, 3, 767-775 doi:10.4236/jsea.2010.38089 Published Online August 2010 (http://www.SciRP.org/journal/jsea) Copyright © 2010 SciRes. JSEA 767 A Genetic Approach to Analyze Algorithm Performance Based on the Worst-Case Instances* So-Yeong Jeon, Yong-Hyuk Kim Department of Computer Science and Engineering, Kwangwoon University, Seoul, Korea. Email: presentover@gmail.com, yhdfly@kw.ac.kr Received June 29th 2010; revised July 15th 2010; accepted July 29th 2010. ABSTRACT Search-based software engineering has mainly dealt with automated test data generation by metaheuristic search tech- niques. Similarly, we try to generate the test data (i.e., problem instances) which show the worst case of algorithms by such a technique. In this paper, in terms of non-functional testing, we re-define the worst case of some algorithms, re- spectively. By using genetic algorithms (GAs), we illustrate the strategies corresponding to each type of instances. We here adopt three problems for examples; the sorting problem, the 0/1 knapsack problem (0/1KP), and the travelling salesperson problem (TSP). In some algorithms solving these problems, we could find the worst-case instances suc- cessfully; the successfulness of the result is based on a statistical approach and comparison to the results by using the random testing. Our tried examples introduce informa tive guidelines to the use of genetic a lgorithms in generating the worst-case instance, which is defined in the aspect of algorithm performance. Keywords: Search-Based Software Engineering, Automated Test Data Generation, Worst-Case Instance, Algorithm Performance, Genet i c Al go ri t hms 1. Introduction In search-based software engineering, researchers have been interested in the automated test data generation so that it would be helpful for testing the software. Since, in general, test data generation is an undecidable problem, metaheuristic search techniques have been used to find the test data. McMinn’s survey [1] summarizes previous studies. In the part of non-functional testing, these stud- ies had a bias to generate the test data that show the best/worst-case execution time. But if we analyze an al- gorithm, not the entire program, there can be many measures other than the execution time, in terms of non-functional testing. Finding test data (or problem instances) for an algo- rithm is as important as finding those of the entire pro- gram. The reason is that algorithms in a program can affect the entire performance of the program and we can exploit problem instances for the algorithms in analyzing them. In fact, Johnson and Kosoresow [2] tried to find the worst-case instance for online algorithms, for the lower bound proof. Also, Cotta and Moscato [3] tried to find the worst-case instance for shell sort to estimate the lower bound of the worst-case complexity. Nevertheless, to the best of our knowledge, such tri- als are currently quite fewer than those in the field of software testing. Of course, fore-mentioned trials are good as initiative studies. But the trials did not intro- duce various strategies for constructing metaheuristics to generate the worst-case instance. Differently from the fore-mentioned studies, in this paper, we introduce various strategies to construct ge- netic algorithms (GAs) [4]1 in generating the worst- case (problem) instance which is defined in the aspect of algorithm performance. For this, we try to find the worst-case instance of three example problems for some algorithms; the (internal) sorting problem, the 0/1 knapsack problem (0/1KP), and the travelling sales- person problem (TSP). These are well-known problems and each can show different strategy to construct a GA. Since we tried not to use the problem-specific knowl- edge in the construction, our suggested GAs can be extended to generate the instances of other similar problems. For the sorting problem, we take as test al- gorithm not only shell sort but also many well-known 1For the sorting problem and the 0/1 knapsack problem, strictly speak- ing, we use memetic algorithms [5], which are GAs combined with local search. But we mainly focus on the GA rather than local search algorithm. Without classification, we just call our searching algorith GA, in this paper. *The present Research has been conducted by the Research Grant o Kwangwoon University in 2010.  A Genetic Approach to Analyze Algorithm Performance Based on the Worst-Case Instances 768 sorting algorithms; quick sort, heap sort, merge sort, insertion sort, and advanced quick sort. For the 0/1KP and the TSP, we test the algorithm based on a greedy approach, comparing to the known-optimal algorithms which are based on the dynamic programming. The remaining part of this paper is organized in the following. In Section 2, we introduce GAs and the three adopted problems with their popular algorithms. Also we define the worst-case instance for each prob- lem, in terms of non-functional testing. In Section 3, we present our GAs for finding the worst-case instance. In Section 4, we explain our experiment plan and the results. We make conclusions in Section 5. 2. Search Technique and Three Problems with Algorithms 2.1 Search Technique: Genetic Algorithms The genetic algorithm (GA) [4] is a non-deterministic algorithm. A non-deterministic algorithm makes guesses, which may or may not be the answer of the problem the algorithm wants to solve. So, it consists of two phases; the guess phase and the evaluation phase. In the guess phase, guesses are made. In the evaluation phase, those guesses are evaluated by how close they are to the right answer. For evaluating guesses, the objective function is defined. This function takes a guess and returns the nu- merical value which indicates how close the guess is to the right answer. In other words, a deterministic algo- rithm searches for an object which maximizing the given objective function. How does GA make a guess? By the principle of evo- lution. GA manages multiple guesses or individuals. We call the set of individual population. A new individual can be constructed by two operations; crossover and mu- tation. The crossover takes two individuals and returns one new individual. This new one is made by assembling each pattern of the two individuals. The mutation takes one individual and returns the individual which has slightly changed pattern from the taken individual. A pattern is found in the representation of the individual. Thus, the way an individual is represented is closely re- lated to the way of making individuals. GA substitutes new individuals for some part of the population; this op- eration is called replacement. How do we select individuals (in the population) for the crossover and the mutation as the input? Which indi- viduals should we replace? By the qualities and the fit- nesses [4] of the individuals. These are evaluated in the evaluation phase. The quality of an individual is the re- turn value of the objective function. The fitness of an individual is evaluated using some part of the population or the entire population, as well as the individual to be evaluated. The fitnesses (not qualities) of the individuals are directly used to selection; fitness evaluation strategies are designed to increase the chances that some individu- als with low qualities are selected. Note that using only qualities for selecting individuals can lose the diversity of the population and narrow the search range of GAs. Using the above operations, GA evolves the population until given stop condition is satisfied. On the other hand, a local search algorithm can be combined with a GA. Given an individual, the local search tries to find out the individual with the best qual- ity near the given individual. A GA combined with local search algorithms is called a memetic algorithm (MA) [5]. Since we want to generate the worst-case instance, each individual is a problem instance. Also, we should define the objective function so that this function returns the value indicating how close given individual is to the worst case. Thus the definition of the function depends on our definition of the worst case. Also, the way an in- stance is represented and strategies of crossover, muta- tion, replacement, fitness evaluation, and stop condition should be defined. 2.2 Sorting Problem In the sorting problem, we are given an array of elements and their comparison operator. The correct solution of this problem is a sorted array in ascending (or descending) order. For the sorting problem, we assume that the com- parison between elements takes so long time that it con- trols the total execution time. An instance of the problem is an array of elements to be sorted where the size of the array is fixed. Let the worst-case instance (array) be the instance that needs the most element-comparisons to sort. In this paper, we will test the following well-known sorting algorithms: quick sort, merge sort, heap sort, in- sertion sort, shell sort, and advanced quick sort. Quick sort and merge sort [6] use the divide-and- conquer strategy. In the quick sort, a pivot element [6] is typically taken as the first element in the array to be di- vided into two partitions; we use the same method in the tested our quick sort. Heap sort [6] mainly uses a data structure called heap [6]. Insertion sort [6] inserts each element of the array into the already-sorted part of the array one by one. Shell sort [7] uses insertion sort re- peatedly using sequence of increments [8]. In tested shell sort, we use the sequence as the reverse order of {hn}, where n ≥ 0 and hn+1 = 3 × hn + 1 with h0 = 1, where the sequence is bounded above the size of sorted array. To improve the quick sort, the advanced quick sort [6] takes as a pivot element the median element of three elements which are randomly chosen from the array to be divided into partitions. 2.3 Zero/One Knapsack Problem Let itemi be an ordered pair vi , wi where vi is its value and wi is its weight. For a given set S = {item1, item2, …, Copyright © 2010 SciRes. JSEA  A Genetic Approach to Analyze Algorithm Performance Based on the Worst-Case Instances 769 itemn}, we want to put items in S into the knapsack where the maximum capacity W is given as cw × ∑wi where i=1, 2, ..., n. Here cw (0, 1) is called the weight coefficient. The optimal solution of the problem is the subset A of S such that ∑ vi (itemi A) is maximized and ∑ wi W (itemi A), where ∑ vi (itemi A) is called the objective value. An algorithm based on the greedy approach [9] for this problem orders items in non-increasing order according to the ‘value per unit weight’ or profit density. Then, it tries to put the items in sequence satisfying that the total weight of the knapsack does not exceed W. We will test the above algorithm in terms of the objec- tive value. An instance of this problem is the set S where the size of S and cw is fixed. Let the worst-case instance be the instance maximizing (O−P)/O, where P is the ob- jective value obtained by the above algorithm and O is the objective value obtained by an optimal algorithm based on dynamic programming [9]. 2.4 Travelling Salesperson Problem A weighted, directed graph G(V, E) is given, where V = {1, 2, ..., n} is a set of cities. An edge e(i, j) E weighted by cij represents that it costs cij to go from cityi to cityj. An example is given in Figure 1. The optimal solution for the TSP is the tour, which is a Hamiltonian circuit of G, that takes the lowest (optimal) total cost if the tour exists. For our test, we assume that there always exists at least one tour although the tour is too expensive. The graph G can be represented as an N × N adjacency matrix as in Figure 1. In a greedy approach we consider, we start from city1. To make a tour, we visit the adjacent city to which we 029 100 106 4 100 708 631000 C æö ÷ ç÷ ç÷ ç÷ ç÷ ç÷ =ç÷ ÷ ç÷ ç÷ ç÷ ç÷ ç÷ ç èø Figure 1. Two representations of an instance for TSP. NOTE. The cost to go from city1 to city2 is 2. This cost is the [1, 2]-th element of the matrix C. On the other hand, the cost to go from city2 to city1 is 1. This cost is the [2, 1]-th element of the matrix C can go from the current city at the lowest cost under the restraint that the city to go has not been visited before. Once the tour is constructed, 2-opt [10] improves this tour. Since the given graph is directed, two tours are de- rived from a base tour at one move in 2-opt; one derived tour is the reverse order of the other derived tour. We will test an algorithm which uses the greedy ap- proach with 2-opt in terms of the objective value (the tour cost). An instance of this problem is the graph G(V, E) where the size of V is fixed. So, let the worst-case instance be the instance maximizing (P−O)/O, where P is the objective value obtained by the above algorithm and O is the objective value obtained by an optimal algorithm based on dynamic programming [9]. 3. Genetic Algorithms 3.1 Framework and Things in Common There exist some trials to design somewhat different GAs [11-13] rather than just adopting traditional design. We also adopt a non-traditional framework of GAs. In our framework, the initialization of a population is done first. Then the following procedure is repeated until the stop condition we set is satisfied: 1) Fitness evaluation is done first. 2) Two parents are selected from the population. 3) One new individual is created by the crossover of the two parents. The other two new individuals are created by the local search from the mutation of each parent; one indi- vidual from one parent and another from the other parent. Steps 2) and 3) are repeated until sufficiently many new individuals are created. 4) Some individuals are replaced from the population with the new individuals. The strategy of the population initialization, fitness evaluation, selection, replacement, and stop condition are fixed in our GAs. The strategies of other operations are different for each problem; these strategies will be intro- duced in the next sections. The initialization of the popu- lation is based on random generation. For the fitness evaluation, we used one based on population sharing [4]. The formula is as follows: Fi = fi / ∑ j{1,2, ..., n} s(dij), (1) where Fi is the fitness of the i-th individual, fi is given as (Ci − Cmin) + (Cmax − Cmin) / (k − 1), Ci is the quality of the i-th individual, Cmin is the minimum quality among individuals, Cmax is the maximum quality among individuals, k (k >1) is a selective pressure, n is the population size, s(dij) is given as 1−(dij/) , dij is the distance between the i-th individual and the j-th one, and is the longest distance among all dij's. Copyright © 2010 SciRes. JSEA 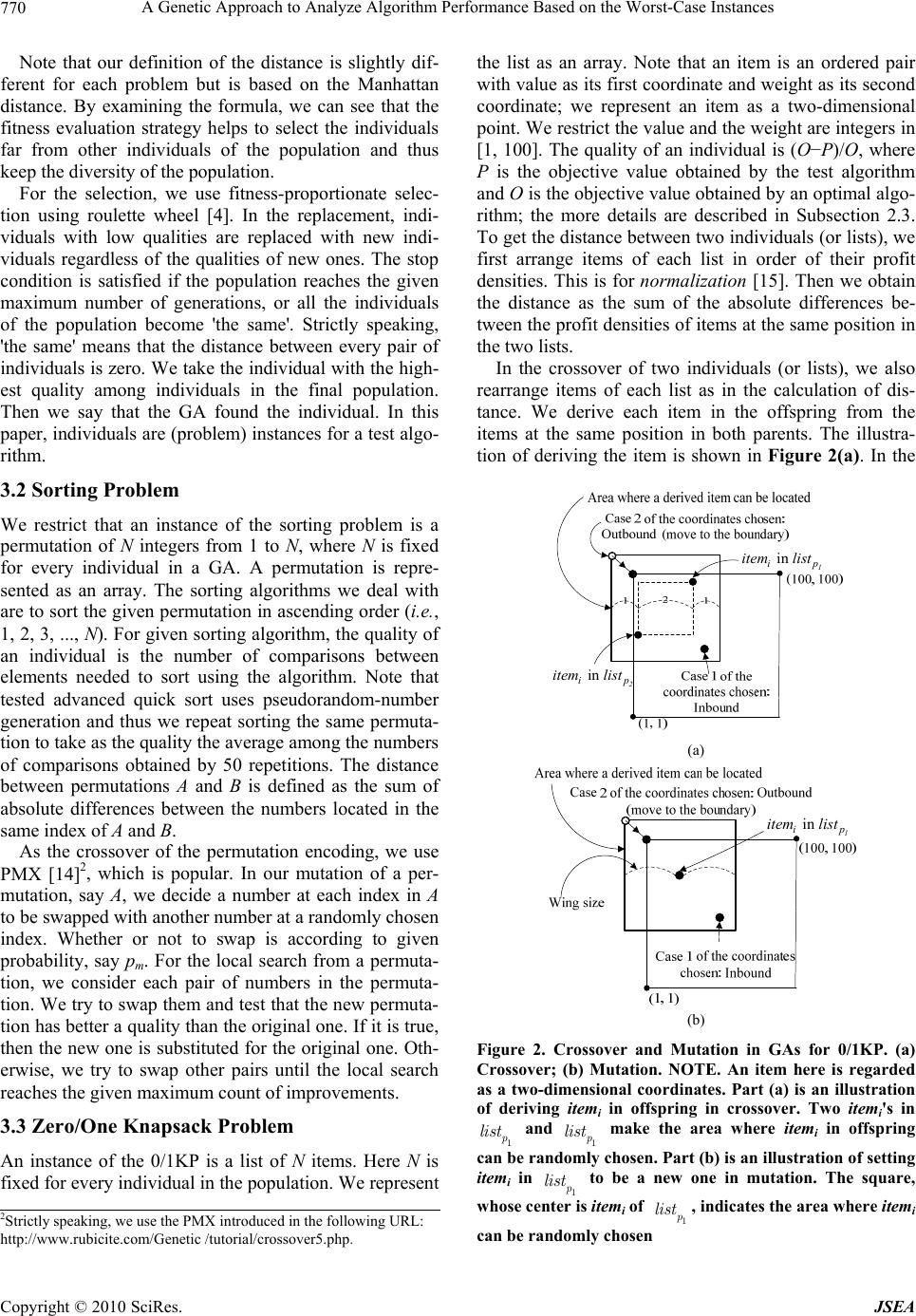 A Genetic Approach to Analyze Algorithm Performance Based on the Worst-Case Instances 770 Note that our definition of the distance is slightly dif- ferent for each problem but is based on the Manhattan distance. By examining the formula, we can see that the fitness evaluation strategy helps to select the individuals far from other individuals of the population and thus keep the diversity of the population. For the selection, we use fitness-proportionate selec- tion using roulette wheel [4]. In the replacement, indi- viduals with low qualities are replaced with new indi- viduals regardless of the qualities of new ones. The stop condition is satisfied if the population reaches the given maximum number of generations, or all the individuals of the population become 'the same'. Strictly speaking, 'the same' means that the distance between every pair of individuals is zero. We take the individual with the high- est quality among individuals in the final population. Then we say that the GA found the individual. In this paper, individuals are (problem) instances for a test algo- rithm. 3.2 Sorting Problem We restrict that an instance of the sorting problem is a permutation of N integers from 1 to N, where N is fixed for every individual in a GA. A permutation is repre- sented as an array. The sorting algorithms we deal with are to sort the given permutation in ascending order (i.e., 1, 2, 3, ..., N). For given sorting algorithm, the quality of an individual is the number of comparisons between elements needed to sort using the algorithm. Note that tested advanced quick sort uses pseudorandom-number generation and thus we repeat sorting the same permuta- tion to take as the quality the average among the numbers of comparisons obtained by 50 repetitions. The distance between permutations A and B is defined as the sum of absolute differences between the numbers located in the same index of A and B. As the crossover of the permutation encoding, we use PMX [14]2, which is popular. In our mutation of a per- mutation, say A, we decide a number at each index in A to be swapped with another number at a randomly chosen index. Whether or not to swap is according to given probability, say pm. For the local search from a permuta- tion, we consider each pair of numbers in the permuta- tion. We try to swap them and test that the new permuta- tion has better a quality than the original one. If it is true, then the new one is substituted for the original one. Oth- erwise, we try to swap other pairs until the local search reaches the given maximum count of improvements. 3.3 Zero/One Knapsack Problem An instance of the 0/1KP is a list of N items. Here N is fixed for every individual in the population. We represent the list as an array. Note that an item is an ordered pair with value as its first coordinate and weight as its second coordinate; we represent an item as a two-dimensional point. We restrict the value and the weight are integers in [1, 100]. The quality of an individual is (O−P)/O, where P is the objective value obtained by the test algorithm and O is the objective value obtained by an optimal algo- rithm; the more details are described in Subsection 2.3. To get the distance between two individuals (or lists), we first arrange items of each list in order of their profit densities. This is for normalization [15]. Then we obtain the distance as the sum of the absolute differences be- tween the profit densities of items at the same position in the two lists. In the crossover of two individuals (or lists), we also rearrange items of each list as in the calculation of dis- tance. We derive each item in the offspring from the items at the same position in both parents. The illustra- tion of deriving the item is shown in Figure 2(a). In the in 1 ip item list in 2 ip item list (a) in 1 ip item list (b) Figure 2. Crossover and Mutation in GAs for 0/1KP. (a) Crossover; (b) Mutation. NOTE. An item here is regarded as a two-dimensional coordinates. Part (a) is an illustration of deriving itemi in offspring in crossover. Two itemi's in 1 and 1 make the area where itemi in offspring can be randomly chosen. Part (b) is an illustration of setting itemi in 1 li to be a new one in mutation. The square, whose center is itemi of , indicates the area where itemi can be randomly chosen p list p list p st 1 p list 2Strictly speaking, we use the PMX introduced in the following URL: http://www.rubicite.com/Genetic /tutorial/crossover5.php. Copyright © 2010 SciRes. JSEA  A Genetic Approach to Analyze Algorithm Performance Based on the Worst-Case Instances 771 mutation from an individual, the probability of changing each item in the individual to be new one is pm. Once an item is determined to be changed, we determine the area of the square where the point indicating a new item can be located. The center of the square is the point indicat- ing the original item. The edge length of the square is determined using the following probability weight func- tion of wing size or (edge length)/2: y = a × (x − x1) + y1, where a < 0 , y is the probability weight of choosing x as a wing size, y1 is the probability weight of choosing x1, and x1 is the maximum wing size. We set y1 to be 1 and set x1 to be floor((UB −LB)/2), with UB = 100 and LB = 1. For a given wing size, the illustration of the changing an item to be a new one is shown in Figure 2(b). In the local search from an individual (or a list), we try to slightly move each item in the list and test that the new list has a better quality than old one. If it is true, then the new one is substituted for the original one. Otherwise, we try to move the next item in the list. The way of slightly moving the item (v, w) is as follows: moving to (v+1, w), (v−1, w), (v, w+1), (v, w−1), (v+1, w+1), (v−1, w−1), (v+1, w−1), or (v−1, w+1), excluding one out of the boundary of [1, 100]; we take the best way among all the possible ways. 3.4 Travelling Salesperson Problem Every instance of the TSP is represented as an N × N adjacency matrix. The N, which is the number of cities, is fixed for every individual in the population. The (i, j) element of the matrix is the cost to go from cityi to cityj. We restrict that every element of the matrix is an integer in [1, 100]. The TSP does not limit the values to be inte- gers. But the bounds reduce the time for finding the worst case, which is still helpful. We will try to find the worst-case instance for two different versions of the problem. In one version, the input instance G is always represented as a symmetric matrix. In the other version, G may be represented as an asymmetric matrix. The dis- tance between two individuals is the sum of absolute differences between (i, j) elements of two matrices. The quality of an individual is (P−O)/O, where P and O are described in Subsection 2.4. For the crossover of two matrices, we use geographic crossover [16-18]. The geographic crossover can gener- ate sufficiently diverse offspring with moderate difficulty in implementing. For the mutation from an individual (or a matrix), our approach is to move each (i, j) element of the matrix with given probability pm. We regard an ele- ment as a point on the number line. If an element is decided to be moved, the element can be moved ran- domly within the interval whose center is the original element. The interval size is decided by the probability weight function of the size. The function is quite similar to one in the 0/1KP. The small size is taken more often than the big one. If we take large interval and the ele- ment moves out of [1, 100], we adjust the location to the closest boundary of the interval. We do not use the local search here. 4. Experimental Results Using the framework and the strategies explained in Sec- tion 3, we tried to find the worst-case instances of test algorithms. We used the computer of which CPU model is Intel Core2 Duo T8100 @ 2.10 GHz. In Table 1, we show the parameters in common for every GA. The us- age of the mutation probability (pm) in Table 1 is de- scribed in Subsections 3.2, 3.3, and 3.4 respectively for the three test problems. Table 2 shows parameters in common for every random testing [1]. We ran the same GA fifty times to check whether our GAs are stochasti- cally reliable. We say that two GAs are the same if and only if they are for the same problem and they belong to the same classification; we propose the classification in Tables 3-5, respectively for each problem. The weight coefficient in Table 4 is described in Subsection 2.3. The probability weight function of wing size in the same table is described in Subsection 3.3. The probability weight function in Table 5 is similar to one in Table 4. This function is referred to in Subsection 3.4. Table 1. Parameters in common for every GA Maximum number of generations 1,000 Selective pressure 3 # of individuals to be replaced for the next generation 30 Population size 100 Mutation probability pm 0.15 # of independent runs of GA 50 Table 2. Parameters in common for every random testing # of instances randomly generated 30,000 # of independent runs of the random testing 50 Table 3. Classification and parameters of GAs for algo- rithms solving sorting problem Size of permutations: 10, 20, 30, or 40 (For advanced quick sort, we tested only on size 10 and 20.) Classification basis Sorting algorithm: quick sort, merge sort, heap sort, in- sertion sort, shell sort, or advanced quick sort Elements of permutation {1,2, ..., N} Limitation of improvement counts in local search The smallest integer bigger than or equal to N×0.25+ 1k n C (denotes the combination.) k n C Copyright © 2010 SciRes. JSEA 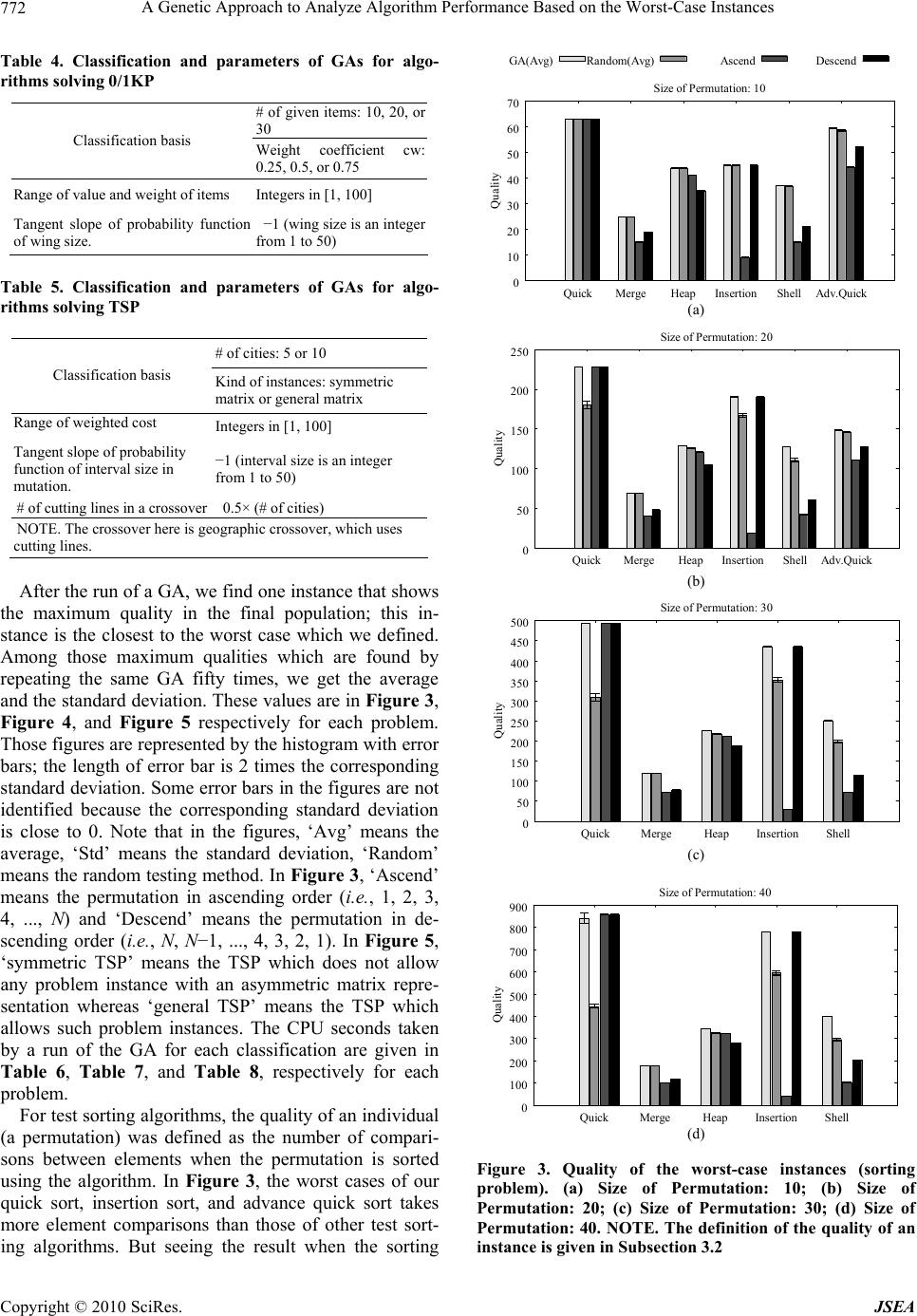 A Genetic Approach to Analyze Algorithm Performance Based on the Worst-Case Instances 772 Table 4. Classification and parameters of GAs for algo- rithms solving 0/1KP # of given items: 10, 20, or 30 Classification basis Weight coefficient cw: 0.25, 0.5, or 0.75 Range of value and weight of items Integers in [1, 100] Tangent slope of probability function of wing size. −1 (wing size is an integer from 1 to 50) Table 5. Classification and parameters of GAs for algo- rithms solving TSP # of cities: 5 or 10 Classification basis Kind of instances: symmetric matrix or general matrix Range of weighted cost Integers in [1, 100] Tangent slope of probability function of interval size in mutation. −1 (interval size is an integer from 1 to 50) # of cutting lines in a crossover 0.5× (# of cities) NOTE. The crossover here is geographic crossover, which uses cutting lines. After the run of a GA, we find one instance that shows the maximum quality in the final population; this in- stance is the closest to the worst case which we defined. Among those maximum qualities which are found by repeating the same GA fifty times, we get the average and the standard deviation. These values are in Figure 3, Figure 4, and Figure 5 respectively for each problem. Those figures are represented by the histogram with error bars; the length of error bar is 2 times the corresponding standard deviation. Some error bars in the figures are not identified because the corresponding standard deviation is close to 0. Note that in the figures, ‘Avg’ means the average, ‘Std’ means the standard deviation, ‘Random’ means the random testing method. In Figure 3, ‘Ascend’ means the permutation in ascending order (i.e., 1, 2, 3, 4, ..., N) and ‘Descend’ means the permutation in de- scending order (i.e., N, N−1, ..., 4, 3, 2, 1). In Figure 5, ‘symmetric TSP’ means the TSP which does not allow any problem instance with an asymmetric matrix repre- sentation whereas ‘general TSP’ means the TSP which allows such problem instances. The CPU seconds taken by a run of the GA for each classification are given in Table 6, Table 7, and Table 8, respectively for each problem. For test sorting algorithms, the quality of an individual (a permutation) was defined as the number of compari- sons between elements when the permutation is sorted using the algorithm. In Figure 3, the worst cases of our quick sort, insertion sort, and advance quick sort takes more element comparisons than those of other test sort- ing algorithms. But seeing the result when the sorting 0 10 20 30 40 50 60 70 Quick Merge Heap Insertion Shell Adv.Qui ck Quality Size of Permutation: 10 GA(Avg) Random(Avg) Ascend Des cen d (a) 0 50 100 150 200 250 Quick Merge Heap Insertion Shell Adv.Qui ck Qua l it y Size of Permutation: 20 (b) 0 50 100 150 200 250 300 350 400 450 500 Quick Merge Heap Insertion Sh ell Qua lit y Size of Permutation: 30 (c) 0 100 200 300 400 500 600 700 800 900 Quick Merge Heap Insertion Shell Quality Size of Permutation: 40 (d) Figure 3. Quality of the worst-case instances (sorting problem). (a) Size of Permutation: 10; (b) Size of Permutation: 20; (c) Size of Permutation: 30; (d) Size of Permutation: 40. NOTE. The definition of the quality of an instance is given in Subsection 3.2 Copyright © 2010 SciRes. JSEA 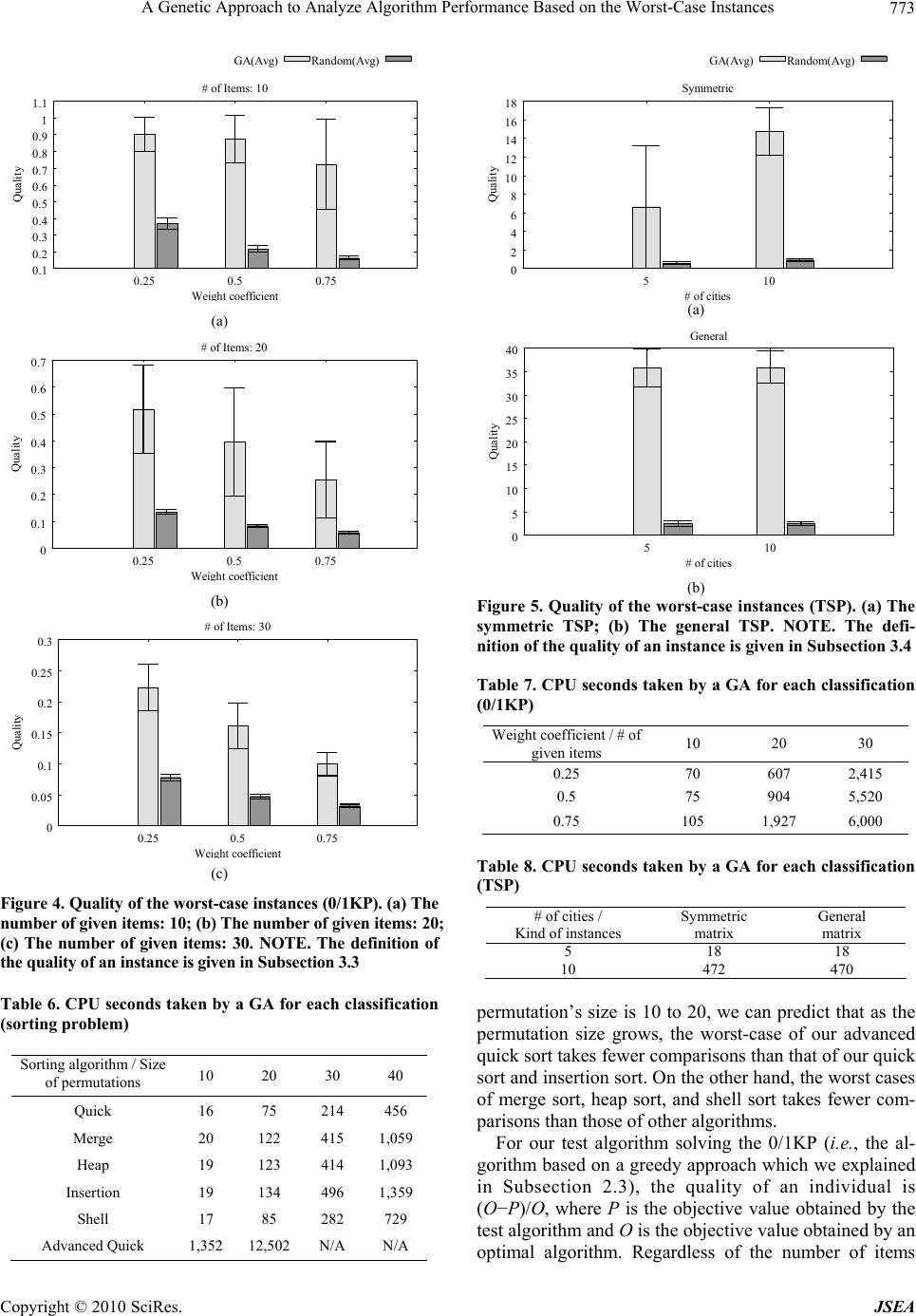 A Genetic Approach to Analyze Algorithm Performance Based on the Worst-Case Instances 773 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 0.25 0.5 0.75 Quality Wei ht coefficient # of Items: 10 GA(Avg) Ran dom (Avg) (a) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.25 0.5 0.75 Quality Wei ht coefficient # of Items: 20 (b) 0 0.05 0.1 0.15 0.2 0.25 0.3 0.25 0.5 0.75 Quality Wei ht coefficient # of Items: 30 (c) Figure 4. Quality of the worst-case instances (0/ 1KP). (a) The number of given items: 10; (b) The num ber of given items: 20; (c) The number of given items: 30. NOTE. The definition of the quality of an in st ance is given in Subsection 3.3 Table 6. CPU seconds taken by a GA for each classification (sorting problem) Sorting algorithm / Size of permutations 10 20 30 40 Quick 16 75 214 456 Merge 20 122 415 1,059 Heap 19 123 414 1,093 Insertion 19 134 496 1,359 Shell 17 85 282 729 Advanced Quick 1,352 12,502 N/A N/A 0 2 4 6 8 10 12 14 16 18 510 Quality # of cities Symmetr ic GA(Avg)Random(Avg) (a) 0 5 10 15 20 25 30 35 40 510 Qual ity # of cities Gener a l (b) Figure 5. Quality of the worst-case instances (TSP). (a) The symmetric TSP; (b) The general TSP. NOTE. The defi- nition of the quality of an instance is given in Subsection 3.4 Table 7. CPU seconds taken by a GA for each classification (0/1KP) Weight coefficient / # of given items 10 20 30 0.25 70 607 2,415 0.5 75 904 5,520 0.75 105 1,927 6,000 Table 8. CPU seconds taken by a GA for each classification (TSP) # of cities / Kind of instances Symmetric matrix General matrix 5 18 18 10 472 470 permutation’s size is 10 to 20, we can predict that as the permutation size grows, the worst-case of our advanced quick sort takes fewer comparisons than that of our quick sort and insertion sort. On the other hand, the worst cases of merge sort, heap sort, and shell sort takes fewer com- parisons than those of other algorithms. For our test algorithm solving the 0/1KP (i.e., the al- gorithm based on a greedy approach which we explained in Subsection 2.3), the quality of an individual is (O−P)/O, where P is the objective value obtained by the test algorithm and O is the objective value obtained by an optimal algorithm. Regardless of the number of items Copyright © 2010 SciRes. JSEA 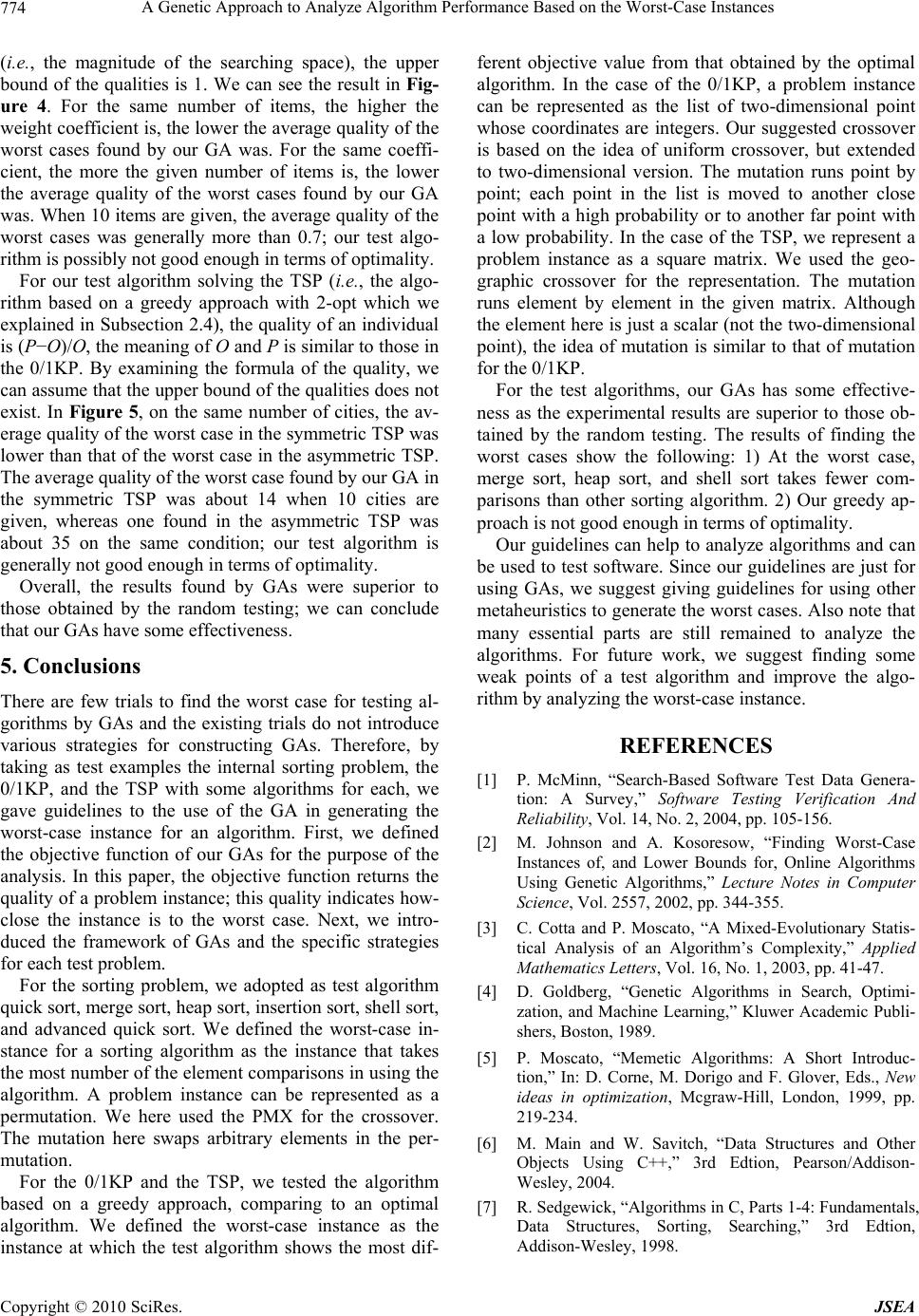 A Genetic Approach to Analyze Algorithm Performance Based on the Worst-Case Instances 774 (i.e., the magnitude of the searching space), the upper bound of the qualities is 1. We can see the result in Fig- ure 4. For the same number of items, the higher the weight coefficient is, the lower the average quality of the worst cases found by our GA was. For the same coeffi- cient, the more the given number of items is, the lower the average quality of the worst cases found by our GA was. When 10 items are given, the average quality of the worst cases was generally more than 0.7; our test algo- rithm is possibly not good enough in terms of optimality. For our test algorithm solving the TSP (i.e., the algo- rithm based on a greedy approach with 2-opt which we explained in Subsection 2.4), the quality of an individual is (P−O)/O, the meaning of O and P is similar to those in the 0/1KP. By examining the formula of the quality, we can assume that the upper bound of the qualities does not exist. In Figure 5, on the same number of cities, the av- erage quality of the worst case in the symmetric TSP was lower than that of the worst case in the asymmetric TSP. The average quality of the worst case found by our GA in the symmetric TSP was about 14 when 10 cities are given, whereas one found in the asymmetric TSP was about 35 on the same condition; our test algorithm is generally not good enough in terms of optimality. Overall, the results found by GAs were superior to those obtained by the random testing; we can conclude that our GAs have some effectiveness. 5. Conclusions There are few trials to find the worst case for testing al- gorithms by GAs and the existing trials do not introduce various strategies for constructing GAs. Therefore, by taking as test examples the internal sorting problem, the 0/1KP, and the TSP with some algorithms for each, we gave guidelines to the use of the GA in generating the worst-case instance for an algorithm. First, we defined the objective function of our GAs for the purpose of the analysis. In this paper, the objective function returns the quality of a problem instance; this quality indicates how- close the instance is to the worst case. Next, we intro- duced the framework of GAs and the specific strategies for each test problem. For the sorting problem, we adopted as test algorithm quick sort, merge sort, heap sort, insertion sort, shell sort, and advanced quick sort. We defined the worst-case in- stance for a sorting algorithm as the instance that takes the most number of the element comparisons in using the algorithm. A problem instance can be represented as a permutation. We here used the PMX for the crossover. The mutation here swaps arbitrary elements in the per- mutation. For the 0/1KP and the TSP, we tested the algorithm based on a greedy approach, comparing to an optimal algorithm. We defined the worst-case instance as the instance at which the test algorithm shows the most dif- ferent objective value from that obtained by the optimal algorithm. In the case of the 0/1KP, a problem instance can be represented as the list of two-dimensional point whose coordinates are integers. Our suggested crossover is based on the idea of uniform crossover, but extended to two-dimensional version. The mutation runs point by point; each point in the list is moved to another close point with a high probability or to another far point with a low probability. In the case of the TSP, we represent a problem instance as a square matrix. We used the geo- graphic crossover for the representation. The mutation runs element by element in the given matrix. Although the element here is just a scalar (not the two-dimensional point), the idea of mutation is similar to that of mutation for the 0/1KP. For the test algorithms, our GAs has some effective- ness as the experimental results are superior to those ob- tained by the random testing. The results of finding the worst cases show the following: 1) At the worst case, merge sort, heap sort, and shell sort takes fewer com- parisons than other sorting algorithm. 2) Our greedy ap- proach is not good enough in terms of optimality. Our guidelines can help to analyze algorithms and can be used to test software. Since our guidelines are just for using GAs, we suggest giving guidelines for using other metaheuristics to generate the worst cases. Also note that many essential parts are still remained to analyze the algorithms. For future work, we suggest finding some weak points of a test algorithm and improve the algo- rithm by analyzing the worst-case instance. REFERENCES [1] P. McMinn, “Search-Based Software Test Data Genera- tion: A Survey,” Software Testing Verification And Reliability, Vol. 14, No. 2, 2004, pp. 105-156. [2] M. Johnson and A. Kosoresow, “Finding Worst-Case Instances of, and Lower Bounds for, Online Algorithms Using Genetic Algorithms,” Lecture Notes in Computer Science, Vol. 2557, 2002, pp. 344-355. [3] C. Cotta and P. Moscato, “A Mixed-Evolutionary Statis- tical Analysis of an Algorithm’s Complexity,” Applied Mathematics Letters, Vol. 16, No. 1, 2003, pp. 41-47. [4] D. Goldberg, “Genetic Algorithms in Search, Optimi- zation, and Machine Learning,” Kluwer Academic Publi- shers, Boston, 1989. [5] P. Moscato, “Memetic Algorithms: A Short Introduc- tion,” In: D. Corne, M. Dorigo and F. Glover, Eds., New ideas in optimization, Mcgraw-Hill, London, 1999, pp. 219-234. [6] M. Main and W. Savitch, “Data Structures and Other Objects Using C++,” 3rd Edtion, Pearson/Addison- Wesley, 2004. [7] R. Sedgewick, “Algorithms in C, Parts 1-4: Fundamentals, Data Structures, Sorting, Searching,” 3rd Edtion, Addison-Wesley, 1998. Copyright © 2010 SciRes. JSEA  A Genetic Approach to Analyze Algorithm Performance Based on the Worst-Case Instances Copyright © 2010 SciRes. JSEA 775 [8] D. Knuth, “The Art of Computer Programming, Volume 3: Sorting and Searching,” 2nd Edtion, Addison-Wesley, New York, 1998. [9] R. Neapolitan and K. Naimipour, “Foundations of Algorithms Using C++ Pseudocode,” 3rd Edtion, Jones and Bartlett Publishers, Inc., 2008. [10] C. Papadimitriou and K. Steiglitz, “Combinatorial Opti- mization: Algorithms and Complexity,” Prentice-Hall, New Haven, 1981. [11] L. Eshelman, “The CHC Adaptive Search Algorithm: How to Have Safe Search When Engaging in Non- traditional Genetic Recombination,” In: G. Rawlins, Ed., Foundations of Genetic Algorithms, Morgan Kauffman, San Mateo, 1991, pp. 265-283. [12] G. Harik, F. Lobo and D. Goldberg, “Compact Genetic Algorithm,” IEEE Transactions on Evolutionary Compu- tation, Vol. 3, No. 4, 1999, pp. 287-297. [13] J. Grefenstette, “Genetic Algorithms for Changing Enviro- nments,” Proceedings Parallel Problem Solving from Nature, Amsterdam, Vol. 2, 1992, pp. 137-144. [14] D. Goldberg and R. Lingle, “Alleles, Loci, and the Traveling Salesperson Problem,” Proceedings of the International Conference on Genetic Algorithms, Hills- dale, 1985, pp. 154-159. [15] S. Choi and B. Moon, “Normalization in Genetic Algorithms,” Genetic and Evolutionary Computation— GECCO-2003, Lecture Notes in Computer Science, Vol. 2723, Springer-Verlag, Berlin, 2003, pp. 862-873. [16] T. Bui, B. Moon, “On Multi-Dimensional Encoding/ Crossover,” Proceedings of the 6th International Confe- rence on Genetic Algorithms, San Francisco, 1995, pp. 49-56. [17] B. Kahng and B. Moon, “Toward More Powerful Recombinations,” Proceedings of the 6th International Conference on Genetic Algorithms, San Francisco, 1995, pp. 96-103. [18] C. Im, H. Jung and Y. Kim, “Hybrid Genetic Algorithm for Electromagnetic Topology Optimization,” IEEE Transactions on Magnetics, Vol. 39, No. 1, 2003, pp. 2163-2169.
|