Paper Menu >>
Journal Menu >>
 Energy and Power Engineering, 2010, 2, 148-153 doi:10.4236/epe.2010.23022 Published Online August 2010 (http://www.SciRP.org/journal/epe) Copyright © 2010 SciRes. EPE Regional Coordination for under Frequency Load Shedding Mohamad Ahmad Anuar, Hassan Bevrani, Takashi Hiyama Department of Computer Science and Electrical Engineering, Kumamoto University, Kumamoto, Japan E-mail: anuarpen@yahoo.co.uk Received April 12, 2010; revised May 25, 2010; accepted July 2, 2010 Abstract Frequency deviation can be used as an indicator of imbalance between supply and demand. When generation is insufficient, it can cause frequency decline in a power system operation. Implementing under frequency load shedding (UFLS) is one of the common methods to overcome this problem. This paper proposes a novel approach for adaptive load shedding. The concept is an extension of shared and targeted load shedding using reserve margin. The optimal system configuration is then selected from those candidates to fulfill operational objectives. Operational constraints related to system parameters, threshold frequency, total of load shed and control area including line capacity are considered. An example using four sub-areas connected to an exter- nal system shows that the proposed regional coordination as an adaptive UFLS is feasible. Keywords: Load Shedding, Multi-Area Power Systems, Load Frequency Control, Emergency Control 1. Introduction Frequency deviation can be used as an indicator of imba- lance between generation and demand. At the same time, it is needed to make sure that the system frequency is in allowable range. Transmission operator or balancing au- thority should ensure that the transmission system is ope- rated so that instability, uncontrolled separation or cas- cading outages will not occur as result of the most severe single contingency and specified multiple contingencies [1]. Practically, transmission operator or balancing auth- ority has the capability and authority to shed load rather than the risk of an uncontrolled failure in the intercon- nection when generation or transmission capacity is in- sufficient. The operators of large scale electrical power systems must be constantly alert of possibilities of a sys- tem failure. This was one of the reasons of cascading problem which occurred in North America blackout on August 14, 2003 [2]. The system experienced asynchro- nous oscillation which lasted for about 1 min 40 s, and no out-of-step relays acted to island the asynchronous system and settle the oscillation. When asynchronous oscillation exists for such a long time, surely the power system will experience cascading tripping of generators, and the system blackout will happen because of load- generation imbalance. Previous studies on the load shedding scheme can be categorized into static and adaptive schemes [3]. In static scheme, a certain amount of load is shed when the sys- tem frequency falls below certain threshold. This scheme is the most simple and used by most utilities. Whereas, adaptive methods are used to consider the characteristics of the power system, generator dynamic behavior under large disturbance and nonlinear interacting generators [4-6]. Almost, both above described methods are based on frequency threshold and/or frequency gradient. The under frequency load shedding is triggered/initiated when the frequency drops below the frequency threshold. Frequency gradient provide an important slope as an index to predict the contingency and manage an appro- priate emergency control plan. This paper proposes a method using adaptive under fre- quency load shedding. The methodology adopted in this method incorporating frequency response analysis, sys- tem parameters, frequency threshold, total of load shed and control area including line capacity in transmission lines. This paper is organized to describe the methodology in Section 2, a test case in Section 3, results and discussion in Section 4, and finally conclusions in Section 5. 2. Methodology 2.1. Frequency Response Analysis Figure 1 shows simplified frequency response model wh- 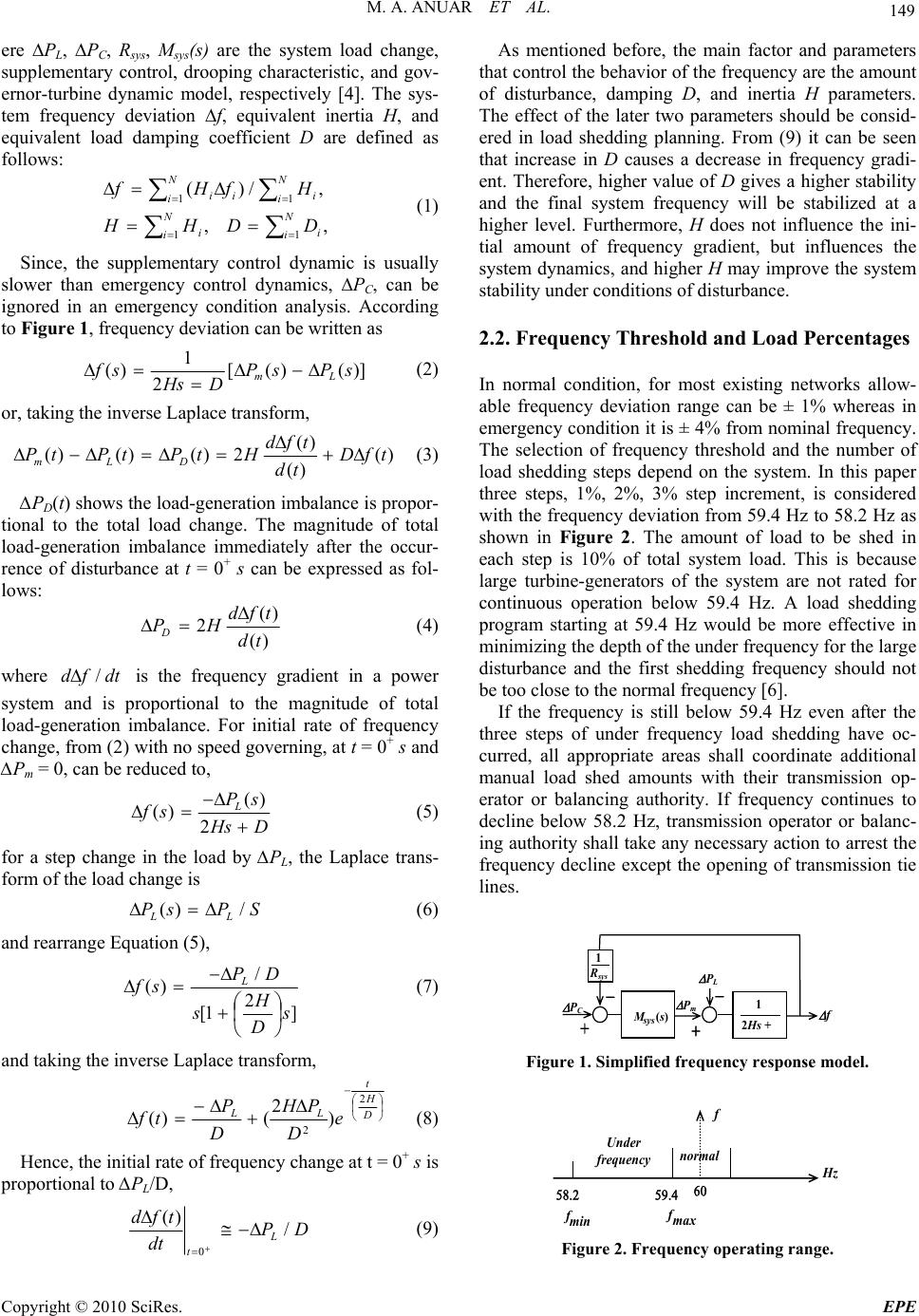 M. A. ANUAR ET AL. Copyright © 2010 SciRes. EPE 149 ere ∆PL, ∆PC, Rsys, Msys(s) are the system load change, supplementary control, drooping characteristic, and gov- ernor-turbine dynamic model, respectively [4]. The sys- tem frequency deviation ∆f, equivalent inertia H, and equivalent load damping coefficient D are defined as follows: N ii N ii N ii N iii DD HH HfHf 11 11 ,, ,/)( (1) Since, the supplementary control dynamic is usually slower than emergency control dynamics, ∆PC, can be ignored in an emergency condition analysis. According to Figure 1, frequency deviation can be written as )]()([ 2 1 )( sPsP D H s sf Lm (2) or, taking the inverse Laplace transform, )( )( )( 2)()()( tfD td tfd HtPtPtPDLm (3) ∆PD(t) shows the load-generation imbalance is propor- tional to the total load change. The magnitude of total load-generation imbalance immediately after the occur- rence of disturbance at t = 0+ s can be expressed as fol- lows: )( )( 2td tfd HPD (4) where dtfd / is the frequency gradient in a power system and is proportional to the magnitude of total load-generation imbalance. For initial rate of frequency change, from (2) with no speed governing, at t = 0+ s and ∆Pm = 0, can be reduced to, DHs sP sf L 2 )( )( (5) for a step change in the load by ∆PL, the Laplace trans- form of the load change is SPsP LL /)( (6) and rearrange Equation (5), ] 2 1[ / )( s D H s DP sf L (7) and taking the inverse Laplace transform, D H t LL e D PH D P tf 2 2) 2 ()( (8) Hence, the initial rate of frequency change at t = 0+ s is proportional to ∆PL/D, DP dt tfd L t / )( 0 (9) As mentioned before, the main factor and parameters that control the behavior of the frequency are the amount of disturbance, damping D, and inertia H parameters. The effect of the later two parameters should be consid- ered in load shedding planning. From (9) it can be seen that increase in D causes a decrease in frequency gradi- ent. Therefore, higher value of D gives a higher stability and the final system frequency will be stabilized at a higher level. Furthermore, H does not influence the ini- tial amount of frequency gradient, but influences the system dynamics, and higher H may improve the system stability under conditions of disturbance. 2.2. Frequency Threshold and Load Percentages In normal condition, for most existing networks allow- able frequency deviation range can be ± 1% whereas in emergency condition it is ± 4% from nominal frequency. The selection of frequency threshold and the number of load shedding steps depend on the system. In this paper three steps, 1%, 2%, 3% step increment, is considered with the frequency deviation from 59.4 Hz to 58.2 Hz as shown in Figure 2. The amount of load to be shed in each step is 10% of total system load. This is because large turbine-generators of the system are not rated for continuous operation below 59.4 Hz. A load shedding program starting at 59.4 Hz would be more effective in minimizing the depth of the under frequency for the large disturbance and the first shedding frequency should not be too close to the normal frequency [6]. If the frequency is still below 59.4 Hz even after the three steps of under frequency load shedding have oc- curred, all appropriate areas shall coordinate additional manual load shed amounts with their transmission op- erator or balancing authority. If frequency continues to decline below 58.2 Hz, transmission operator or balanc- ing authority shall take any necessary action to arrest the frequency decline except the opening of transmission tie lines. P C - + sy s M (s) P L + - 2Hs + 1 f P m R s y s 1 Figure 1. Simplified frequency response model. f normal Under frequency H z fmax fmin Figure 2. Frequency operating range.  M. A. ANUAR ET AL. Copyright © 2010 SciRes. EPE 150 2.3. Total of Load Shed In a load shedding scheme, total amount of load shed can be considered as )(,reserveLDLS PPP (10) where, ΔPD is the load disturbance and ΔPL,reserve is the reserve (secondary control reserve) capacity of the sys- tem with maximum allowable change of frequency 0.6 Hz as mentioned in Subsection 2.2 [7]. From (8), the relation between Δf(t) and ΔPL can be represented as L D H t Pe D H D tf 2 2 21 )( (11) 2.4. Control Area Load Shedding A control area is an electrical system bounded by inter- connected (tie-line) to control generation for maintaining power interchange schedule and contributing to frequen- cy regulation [8]. A significant decline in frequency may require the shedding of load in order to avoid widespread system outages and to minimize the risk of damage to equipment. The three frequency threshold values (59.4 Hz, 58.8 Hz, and 58.2 Hz) are the same for all the sub-areas so that all entities would participate during a region-wide or multi-region load shedding. During planning we can de- termine the generation reliability of the power system. One of parameters for generation reliability is reserve margin (RM) which is defined as [9] Load LoadCapacity Installed RM N % (12) where N is the number of sub-areas. The weight or con- tribution factor for the RM for each area can be obtained using (12). A new sequence for load shedding can be created by ranking the RM from the smallest to the larg- est. N RMRMRM ,,, 21 (13) The sub-area with RM1 contributes the most to the system unreliability because of less RM. Negative value of the RM indicates negative reserve, or in other word. The load is greater than generation in that particular sub-area. For system stability the load shedding opera- tion can be targeted, sequentially, starting from the sub- area with the least RM until the system frequency is sta- bilized to a new steady state condition. 3. Test Case The study system is composed of four sub-areas con- nected to an external system. The configuration of the study system is shown in Figure 3. Area I and II are in- terconnected through a 500 kV tie-line. Area I consists of four sub-areas A–D. The sub-areas A–D have eight, five, seven, and three thermal units, respectively. So, external system is considered as Area II. The power system pa- rameters are considered similar to the practical system, which is described in detail in [10-12]. 4. Results and Discussion Table 1 shows the system parameters for four sub-areas connected to an external system. It is observed that sub- area C has the highest value of D and H (i.e. D = 0.0576 and H = 0.384 respectively) which implies that it has the highest stability margin in comparison to other sub-areas. With the given parameters of generation and load, the RM for all the sub-areas can be calculated by using Equation (12) and displayed in Table 2. As seen in the table, sub-areas A and C have the lowest (RM = –42) and the highest (RM = 284.85) RM value respectively. SuB-AREA A SuB-AREA B External SuB-AREA C SuB-AREA D Figure 3. Two control area power system. Table 1. System parameters. System Parameter Sub-area A Sub-area B Sub-area C Sub-area D D (Load Damping factor) 0.03520.02 0.05760.0352 H (System Inertia) 0.23470.133 0.384 0.2347 Table 2. Generation and load parameters. Sub-area A Sub-area B Sub-area C Sub-area D Load (pu) 0.62690.2388 0.1492 0.4776 Generation(pu) 0.362 0.2537 0.5742 0.3026 Reserve Margin (%)–42 6.24 284.85 –36.64  M. A. ANUAR ET AL. Copyright © 2010 SciRes. EPE 151 The maximum reserved power available in Area I is 1500 MW (10% of peak load demand). For load shed- ding scheme we consider two cases of extreme test sce- narios i.e. a large load disturbance of 3000 MW in sub- area A and C. The total area load demand is much higher than the reserved power, whilst the primary and supple- mentary controls cannot maintain the frequency at the nominal value. Under this condition the system is under emergency condition and the UFLS scheme should be implemented to recover the system frequency. 4.1. Disturbance at Sub-Area A As seen in Table 2, sub-area A has the least RM and there- fore a large load disturbance of 0.3 pu occurred and the implementations of UFLS are considered in the same area. Figure 4 shows the amount of load shed, the fre- quency deviation and frequency gradient in all the sub-areas. In the Figure 4(a), only one step load shed- ding (10% of the load) was implemented. It is sufficient enough to bring the system frequency back to the near normal allowable region as in Figure 4(b). Figure 4(c) shows the detection of frequency gradient in emergency condition. Figure 5 shows the tie line and trunk line power flows under the test condition. Furthermore, it may also be not- ed that the trunk line power flows into sub-area A except for sub-area D, which actually imports power from sub- area A. 40 50 60 70 80 90100 110 120 130 140150 0 0. 1 0. 2 (a) P UFLS (pu) 40 50 60 70 80 90100 110 120 130 140150 -0.6 -0.4 -0.2 0 (b) f (Hz) -0.5 0 0. 5 d f/dt (Hz/s) ΔPUFLS (pu) Δf (Hz) dΔf/dt (Hz/s) (a) (b) (c) 0 -0.2 -0.4 -0.6 0.5 0 -0.5 40 50 60 70 80 90 100 110 120 130 140 150 Time ( sec ) 40 50 60 70 80 90 100 110 120 130 140 150 40 50 60 70 80 90 100 110 120 130 140 150 0.2 0.1 0 Figure 4. Load shedding plan in sub-area A, frequency deviation and frequency gradient in all sub-areas of Area I respec- tively. 4 050 60 70 80 90 100 110 120 130 14015 4 050 60 70 80 90 100 110 120 130 14015 4 050 60 70 80 90 100 110 120 130 14015 4 050 60 70 80 90 100 110 120 130 14015 Ptie [MW] 40 50 60 70 80 90 100 110 120 130 140 15 0 time ( s ) 0 -200 0 -400 0 PBA [MW] PDA [MW] PCA [MW] 1000 500 0 -500 6000 4000 2000 0 -1000 -2000 -3000 40 50 60 70 80 90 100 110 120 130 140 15 0 40 50 60 70 80 90 100 110 120 130 140 15 0 40 50 60 70 80 90 100 110 120 130 140 15 0 Figure 5. Tie line and trunk power fluctuation load change in sub-area A.  M. A. ANUAR ET AL. Copyright © 2010 SciRes. EPE 152 4.2. Disturbance at Sub-Area C A large load disturbance of 0.3 pu is considered. Since sub-area C has the highest system parameters and RM, the load shedding does not implement in the same area. Instead, load shedding was implemented in some other area. Due to low RMs and identical system parameters, load could be shed in either sub-area A or D. Figure 6 shows the amount of load shed, the frequency deviation and frequency gradient in all the sub-areas. As seen in Figure 6(a), one step load shedding is implemented at sub-area D. Since sub-area D imports power from A, it is better to shed load in D. It is sufficient enough to bring the system frequency back to the near normal allowable region in Figure 6(b). The detection of frequency gradi- ent in emergency condition is shown in Figure 6(c). Figure 7 shows the tie line and trunk line power flows under the test condition to support Figure 6. Usually 4 050 60 70 80 90 100 110 120 130 140 1 5 0 2 (a) 4 050 60 70 80 90 100 110 120 130 140 1 5 6 4 2 0 (b) 5 0 5 ΔP UFLS (pu) Δf (Hz) dΔf/dt (Hz/s) 0.2 0.1 0 (b) (c) 0 -0.2 -0.4 -0.6 0.5 0 -0.5 40 50 60 70 80 90 100 110 120 130 140 150 Time ( sec ) (a) 40 50 60 70 80 90 100 110 120 130 140 150 40 50 60 70 80 90 100 110 120 130 140 15 0 Figure 6. Load shedding plan in sub-area D, frequency deviation and frequency gradient in all sub-areas of Area I respec- tively. 4 050 60 70 8090100 110 120 130 140 150 4 050 60 70 8090100 110 120 130 140 150 4 050 60 70 8090100 110 120 130 140 150 4 050 60 70 8090100 110 120 130 140 150 time[s] Ptie [MW] time ( s ) 2000 0 -2000 -4000 P B A [MW] P D A [MW] P C A [MW] 1000 0 -1000 6000 4000 2000 0 2000 0 -2000 40 50 60 70 80 90 100 110 120 130 140 150 40 50 60 70 80 90 100 110 120 130 140 150 40 50 60 70 80 90 100 110 120 130 140 150 40 50 60 70 80 90 100 110 120 130 140 150 Figure 7. Tie line and trunk power fluctuation load change in sub-area C.  M. A. ANUAR ET AL. Copyright © 2010 SciRes. EPE 153 sub-area C will transfer power to sub-area A before the disturbance took place. But, in this case, 0.3 pu distur- bance is manageable to load-generation imbalance (gen- eration is greater than load) as discussed in Table 2. So, sub-area C reduced power transfer to sub-area A after the disturbance. Consequently sub-area A reduced power transfer to sub-area D. Hence, Figure 7 is the evidence of the amounts of power transfer from sub-area C to A and sub-area A to D in a drastic reduction manner. 5. Conclusions Regional coordination in emergency conditions is very im- portant for power system operation and security. These regions are interconnected to each other for improving reliability and reducing cost. Practically, each region has different generation and load. This condition will affect reserve margin. The reserve margin is used to identify a sequential load shedding. This paper shows that regional coordination for four sub-areas connected to an external system using adaptive under frequency load shedding is feasible. 6. Acknowledgements The authors would like to thank Graduate School of Sci- ence and Technology (GSST), Kumamoto University, Japan and MARA University of Technology (UiTM), Malaysia for continuous support of this research. 7. References [1] R. Baldick, B. Chowdhury, I. Dobson, Z. Dong, B. Gou, D. Hawkins, H. Huang, M. Joung, D. Kirschen, F. X. Li, J. Li, Z. Y. Li, C.-C. Liu, L. Mili, S. Miller, R. Podmore, K. Schneider, K. Sun, D. Wang, Z. G. Wu, P. Zhang, W. J. Zhang and X. P. Zhang, “Initial Review of Methods for Cascading Failure Analysis in Electric Power Transmis- sion Systems,” IEEE Power and Energy Society General Meeting, Pittsburgh, 20-24 July 2008, pp. 1-8. [2] Y. Liu and Y. Liu, “Aspects on Power System Islanding for Preventing Widespread Blackout,” Proceeding of the 2006 IEEE International Conference on Networking, Sensing and Control, Ft. Lauderdale, 23-25 April 2006, pp. 1090-1095. [3] J. J. Ford, H. Bevrani and G. Ledwich, “Adaptive Load Shedding and Regional Protection,” International Jour- nal of Electrical Power & Energy Systems, Vol. 31, No. 10, 2009, pp. 611-618. [4] H. Bevrani, G. Ledwich and J. J. Ford, “On the Use of df/dt in Power System Emergency Control,” Proceedings of IEEE Power Systems Conferences and Exposition, Se- attle, 15-18 March 2009, pp. 1-6. [5] T. Tomsic, G. Verbic and F. Gubina, “Revision of the Underfrequency Load-Shedding Scheme of the Slovenian Power System,” Electric Power Systems Research, Vol. 77, No. 5-6, 2007, pp. 494-500. [6] S.-J. Huang and C.-C. Huang, “Adaptive Load Shedding Method with Time-Based Design for Isolated Power Sys- tems,” International Journal of Electrical Power & En- ergy Systems, Vol. 22, No. 1, 2000, pp. 51-58. [7] H. Bevrani, “Robust Power System Frequency Control,” Springer, New York, 2009. [8] M. A. Anuar, U. Dorji and T. Hiyama, “Principle Areas for Islanding Operation Based on Distribution Factor Matrix,” The 15th International Conference on Intelligent Systems Applications to Power Systems, Curitiba, 8-12 November 2009, pp. 1-6. [9] NERC, Assessments & Trends, Reliability Indicators, “ALR 1-3 Planning Reserve Margin”. http://www.nerc. com [10] T. Hiyama, S. Koga and Y. Yoshimuta, “Fuzzy Logic Based Multi-Functional Load Frequency Control,” Pro- ceedings of the IEEE PES Winter Meeting, Singapore, 23-27 January 2000, Vol. 2, pp. 921-926. [11] T. Hiyama and G. Okabe, “Coordinated Load Frequency Control between LFC Unit and Small Sized High Power Energy Capacitor System,” Proceedings of the Interna- tional Conference on Power System Technology, Singa- pore, 21-24 November 2004, pp. 1229-1233. [12] H. Bevrani, G. Ledwich, Z. Y. Dong and J. J. Ford, “Re- gional Frequency Response Analysis under Normal and Emergency Conditions,” Electric Power System Research, Vol. 79, No. 5, May 2009, pp. 837-845. |