Paper Menu >>
Journal Menu >>
 I. J. Communications, Network and System Sciences. 2008; 1: 1-103 Published Online February 2008 in SciRes (http://www.SRPublishing.org/journal/ijcns/). Copyright © 2008 SciRes. I. J. Communications, Network and System Sciences. 2008; 1:1-103 Advanced Localization of Mobile Terminal in Cellular Network Marco ANISETTI1, Claudio A. ARDAGNA1, Valerio BELLANDI1 Ernesto DAMIANI1, Salvatore REALE2 1Department of Information Technologies, University of Milan, via Bramante 65, Crema (CR), Italy 2Nokia Siemens Networks, via Monfalcone 1, Cinisello Balsamo (MI), Italy Email: {anisetti, ardagna, bellandi, damiani}@dti.unimi.it, salvatore.reale@nsn.com Abstract The growing diffusion of pervasive collaboration environments and technical advancement of sensing technologies have fostered the development of a new wave of online services whose functionalities are based on users’ physical position. Thanks to the widespread diffusion of mobile devices (e.g. cell phones), many services can be greatly enriched with data reporting where people are, how they are moving, or whether they are close by specific locations. Geolocation of mobile terminals relies on the cellular network infrastructure and protocols to provide a reliable and accurate estimate of mobile terminals’ position, without the need of global positioning systems, such as GPS. In this paper, we present a novel lookup table correlation technique for geolocation, with multiple position estimations and optimal location techniques. Our approach provides high precise location and tracking of mobile terminals by exploiting advanced propagation models for mobile radio networks design, and by querying Geographical Information Systems (GIS), in conjunction with Kalman predictive filtering. Keywords: Mobile Phone, Geolocation, Kalman Filter 1. Introduction In the field of mobile networks, the term “geolocation” is used for denoting a variety of techniques aimed at mobility prediction, which is, computing and tracking the position of a mobile terminal. Mobility prediction can be exploited both at network and service level. At network level, mobility prediction and location support several crucial tasks, such as handoff management [1], efficient code division in 3G network [2], orthogonality factor prevision for WCDMA network [3], wireless routing management [4], system for QoS support [5][6] and resource allocation [7]. At service level, mobility prediction and location are tightly coupled with number of location-based applications, such as, navigation, instant messaging [8], friend finder and point of interest services [9][10], emergency rescue [11], and many other safety and security services [12][13][14][15][16]. Although some of the above applications need only rough position estimation, many of them need precise tracking of mobile terminal position within cells to provide an adaptable quality of service. A first branch of research on mobile geolocation focuses on satellite-based positioning, i.e., GPS (Global Positioning System) [17], which is an interesting option for high-end applications, where location precision represents a critical requirement. However, standard GPS geolocation is not well suited for all contexts, as for instance in dense urban areas or inside buildings, where satellites are not visible from the mobile terminals. For these reasons, we claim that even leaving costs and impact on battery consumption aside, GPS techniques are not likely to be the key technologies for a number of interesting Location Based Services (LBSs), such as mobile tracking and path certification. Also, GPS systems are not suitable within urban areas, due to the high costs of their adaptation to urban settings. By contrast, our solution is based on traditional GSM/3G networks and does not involve any change to existing mobile network infrastructure being based on data collected by the cellular network. Our general purpose, low cost Positioning and Motion Tracking System (PMTS) for mobile networks provides mobility prediction both at network and service level [18]. In this paper, we discuss the importance of GIS information in Electro Magnetic Field (EMF) prediction for PMTS and propose a novel technique for high reliable mobile terminals location and tracking. Our proposal relies on additional information extracted from a GIS database covering the area of interest, used in conjunction with advanced predictive filtering. In general GIS maps can include information about the roadways (Type 1), to 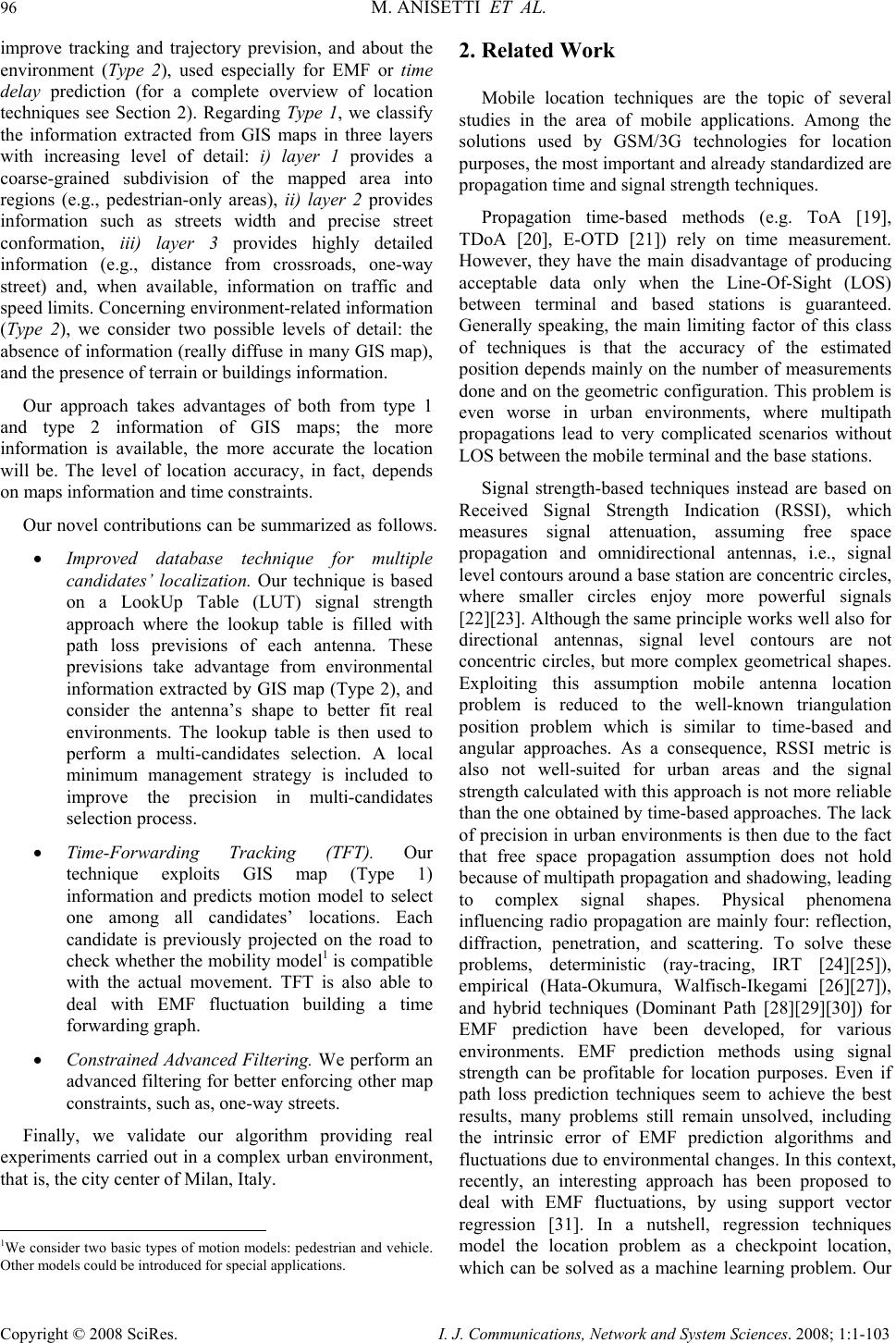 96 M. ANISETTI ET AL. Copyright © 2008 SciRes. I. J. Communications, Network and System Sciences. 2008; 1:1-103 improve tracking and trajectory prevision, and about the environment (Type 2), used especially for EMF or time delay prediction (for a complete overview of location techniques see Section 2). Regarding Type 1, we classify the information extracted from GIS maps in three layers with increasing level of detail: i) layer 1 provides a coarse-grained subdivision of the mapped area into regions (e.g., pedestrian-only areas), ii) layer 2 provides information such as streets width and precise street conformation, iii) layer 3 provides highly detailed information (e.g., distance from crossroads, one-way street) and, when available, information on traffic and speed limits. Concerning environment-related information (Type 2), we consider two possible levels of detail: the absence of information (really diffuse in many GIS map), and the presence of terrain or buildings information. Our approach takes advantages of both from type 1 and type 2 information of GIS maps; the more information is available, the more accurate the location will be. The level of location accuracy, in fact, depends on maps information and time constraints. Our novel contributions can be summarized as follows. • Improved database technique for multiple candidates’ localization. Our technique is based on a LookUp Table (LUT) signal strength approach where the lookup table is filled with path loss previsions of each antenna. These previsions take advantage from environmental information extracted by GIS map (Type 2), and consider the antenna’s shape to better fit real environments. The lookup table is then used to perform a multi-candidates selection. A local minimum management strategy is included to improve the precision in multi-candidates selection process. • Time-Forwarding Tracking (TFT). Our technique exploits GIS map (Type 1) information and predicts motion model to select one among all candidates’ locations. Each candidate is previously projected on the road to check whether the mobility model1 is compatible with the actual movement. TFT is also able to deal with EMF fluctuation building a time forwarding graph. • Constrained Advanced Filtering. We perform an advanced filtering for better enforcing other map constraints, such as, one-way streets. Finally, we validate our algorithm providing real experiments carried out in a complex urban environment, that is, the city center of Milan, Italy. 1We consider two basic types of motion models: pedestrian and vehicle. Other models could be introduced for special applications. 2. Related Work Mobile location techniques are the topic of several studies in the area of mobile applications. Among the solutions used by GSM/3G technologies for location purposes, the most important and already standardized are propagation time and signal strength techniques. Propagation time-based methods (e.g. ToA [19], TDoA [20], E-OTD [21]) rely on time measurement. However, they have the main disadvantage of producing acceptable data only when the Line-Of-Sight (LOS) between terminal and based stations is guaranteed. Generally speaking, the main limiting factor of this class of techniques is that the accuracy of the estimated position depends mainly on the number of measurements done and on the geometric configuration. This problem is even worse in urban environments, where multipath propagations lead to very complicated scenarios without LOS between the mobile terminal and the base stations. Signal strength-based techniques instead are based on Received Signal Strength Indication (RSSI), which measures signal attenuation, assuming free space propagation and omnidirectional antennas, i.e., signal level contours around a base station are concentric circles, where smaller circles enjoy more powerful signals [22][23]. Although the same principle works well also for directional antennas, signal level contours are not concentric circles, but more complex geometrical shapes. Exploiting this assumption mobile antenna location problem is reduced to the well-known triangulation position problem which is similar to time-based and angular approaches. As a consequence, RSSI metric is also not well-suited for urban areas and the signal strength calculated with this approach is not more reliable than the one obtained by time-based approaches. The lack of precision in urban environments is then due to the fact that free space propagation assumption does not hold because of multipath propagation and shadowing, leading to complex signal shapes. Physical phenomena influencing radio propagation are mainly four: reflection, diffraction, penetration, and scattering. To solve these problems, deterministic (ray-tracing, IRT [24][25]), empirical (Hata-Okumura, Walfisch-Ikegami [26][27]), and hybrid techniques (Dominant Path [28][29][30]) for EMF prediction have been developed, for various environments. EMF prediction methods using signal strength can be profitable for location purposes. Even if path loss prediction techniques seem to achieve the best results, many problems still remain unsolved, including the intrinsic error of EMF prediction algorithms and fluctuations due to environmental changes. In this context, recently, an interesting approach has been proposed to deal with EMF fluctuations, by using support vector regression [31]. In a nutshell, regression techniques model the location problem as a checkpoint location, which can be solved as a machine learning problem. Our  ADVANCED LOCALIZATION OF MOBILE TERMINAL IN CELLULAR NETWORK 97 Copyright © 2008 SciRes. I. J. Communications, Network and System Sciences. 2008; 1:1-103 approach, however, does not rely on a training phase, since real data sampling are not available everywhere. Furthermore, we focus on tracking and on dense localization, where checkpoint and neural network based strategies are not suitable. Specially, we rely on the basic techiniques outlined below. Database correlation. This technique relies on a database built on RSSI predictions or measurements. Mobile terminals positions are determined by evaluating RSSI measurements, which are performed by individual terminals or even by the BSs. The measurements are compared with the entries in the database. The corresponding correlation calculations find out the database entry that better matches the measurements lead to a location estimation [32][33]. Our approach basically relies on the principle of database correlation. Much in line with the RADAR system developed by Microsoft research [34] for wireless networks, our method uses a LUT for multiple candidates’ selection. Differently from RADAR, however, we select the number of candidates depending on the sensibility of the region and on GIS information. Filtering. Using triangulation and database correlation, the intrinsic location error of RSSI is never taken into account. Many recent works are aimed at overcoming this problem using Kalman filtering techniques with mobile motion model and RSSI triangulation. One interesting work [39] treats the problem of mobility in ATM network. It develops a hierarchical user mobility model that closely represents the movement behavior of a mobile user, and uses pattern matching and Kalman filtering, yielding to an accurate location prediction algorithm. Another work [40] proposes two algorithms for real-time tracking, location, and dynamic motion of a mobile station in a cellular network. This method is based on pre-filtering and two Kalman filters (one to estimate the discrete command process and the other to estimate the mobility state). The mobility model is built on a dynamic linear system driven by a discrete command process that was originally developed for tracking maneuvering targets in tactical weapons system [35][36]. The command process is modeled as a semi-Markov process over a finite set of acceleration levels, as in [37]. The filtering technique, presented in our work does not filter the location of mobile using RSSI [37][38], but it takes the most probable position filtered by our Time Forwarding Tracking (TFT) technique and tries to enforce the map and motion model constraints. Therefore, our filtering technique is well distinct from the ones introduced above, even if it exploits a similar motion model. 3. EMF Prediction with Antennas’ Shape EMF prediction is a crucial task for those location strategies relying on triangulation or lookup table over RSSI. The amount of GIS information available (Type 2 from GIS map) drives the choice among a number of applicable algorithms. In this paper, we adopt Hata- Okumura [26] for prediction in absence of environmental information and COST231 Wallfisch-Ikegami [27] to take into account the shapes of the buildings. The statistic prediction model COST231 is only suitable for simulated environment where antennas are supposed to be omni- directional. In our previous works, we adopted this approach for EMF prediction, obtaining very good results in a simulated urban environment [39][40]. In real environment, however, this omni-directionality cannot be assumed without a loss in EMF estimation quality, since real antennas’ shape have a big impact on EMF prediction. There are two ways to deal with real antennas’ shapes: i) use a deterministic ray-tracing, ii) introduce shapes in statistical EMF prediction. Here, we propose a variation of COST231 that includes a simple notion of antenna shape to better estimate the EMF. The deterministic ray tracing techniques in fact suffer of several problems, as for instance burdensome time-complexity need for a high precision antenna database, which make them not suitable for our approach. We model the shape of the antenna as a simple function Sa of the direction angle, Sa:[0…360] → [0…Maxloss], where Maxloss is the maximum loss defined for a certain type of antenna. Function Sa(α) maps degree α to the loss due to the shape of the antenna a; such loss depends upon the angle of the point where the field is measured with respect to the antenna’s main axes. As an example, using our shape function inside COST231, the path loss of point p over the map, with respect to antenna a, is defined as follow: badd llPATHLOSS += (1) where ladd=Sa(α) represents the additional loss produced by the shape of the antenna a, with α the angle identified by point p and the principal direction of antenna a, and lb is the component of canonical COST231 (i.e., either LOS or NLOS). Fig. 1 shows a comparison between EMF predicted with buildings structure and omni-directional antennas and EMF predicted with buildings structure and directional antennas. Figure 1. Comparison between omni-directional antennas and directional antennas. The availability of information about the shapes and directions of the antennas, as well as more information on the environment, allows of significantly improving the  98 M. ANISETTI ET AL. Copyright © 2008 SciRes. I. J. Communications, Network and System Sciences. 2008; 1:1-103 accuracy of the prevision. Also, the knowledge of buildings heights and sizes greatly improves the quality of prediction. To assess this improvement, we performed several tests described in the experimental results in Section 7. Fig. 2 shows a comparison between real RSSI and the predicted ones using shape and COST231. Fluctuation is a typical problem of real environments; nevertheless the predicted trend is very close to the real one. Figure 2. Comparison between real RSSI in red and the estimated ones in black. 4. Multiple Candidate Lookup Table Geolocation The core of our solution is based on a database correlation approach [33], where the position of a mobile terminal is determined by comparing the measurements performed by the mobile terminal itself (assuming it knows the signal strengths of the six bestserving antennas) with the entries in the lookup table. Our lookup table is defined in the area of interest, starting from the predicted path loss for all the antennas in the area. Using these prediction values, we obtain a matrix with the structure shown in Table 1. Every row in the matrix represents a single point within the coverage area (expressed in x, y coordinates, if 2D cartesian representation of area is used, or as a latitude and longitude pair, if GPS representation is used). The path loss predictions from the r-th base stations to each given point p are stored as entries in the row corresponding to point p. Table 1. Lookup table structure Of course, lookup table filling and updating can be done only once in a while, when major changes on the area of interest occur. In principle, all EMF prediction models can be used to compute the lookup table, depending on application requirements. Generally speaking, computing the lookup table for a given area consists in super-imposing a grid where field levels are quantized. The grid does not need to be uniform; rather, its sparseness can be controlled on the basis of the characteristics of the area of interest and of the cost constraints. During the process of locating a mobile device, the observed path loss on terminal is compared with all entries in the table. This comparison can be done with many different criteria (interesting examples can be found in [33]). Specifically, we used a sum of squared errors between the measured path loss Mj for each antenna j and the path loss defined by entry i in the lookup table Ei,j (see Equation (2)). Formally, we introduce the following equation. () ∑ = −= r j jij EMe 1 2 , (2) The location of the mobile terminal is defined as the coordinates of the entry in the table that produces the smallest error e. Of course, this single-point location technique suffers of an intrinsic error; indeed, the estimated mobile terminal position using this kind of minimization hardly ever gives the correct geolocation due to discrepancy between real field strength and the predicted one. The main causes of error in predicting field strength are: i) intrinsic model error, ii) imprecision in geographical database, iii) variation in the antenna features, iv) variation in weather conditions. Again, these errors are spread over all the area of interest. For these reasons, our approach produces a variable number n of position estimates, depending on a sensibility map analysis. Our sensibility map, built on map information and antennas positions, represents the error sensitivity of our multiple candidates geolocation method [40]. As expected, the higher the candidates number, the higher the probability of obtaining a better location. Nevertheless there is an unwanted side effect in increasing the number of candidates: the number of candidates taken into account increases the complexity of the candidate selection process described in the following section. 5. Time-Forwarding Tracking (TFT) For validating candidates selected using the techniques introduced in the previous section, we developed a tracking method based on a time-forwarding algorithm. This algorithm uses m time position estimates and n nodes candidates at each time to define a directed acyclic graph, called Time Forwarding Graph (TFG). Every node p in the graph represents one of the possible positions of the mobile terminal, while edges, defined by the bounded  ADVANCED LOCALIZATION OF MOBILE TERMINAL IN CELLULAR NETWORK 99 Copyright © 2008 SciRes. I. J. Communications, Network and System Sciences. 2008; 1:1-103 nodes (source and destination nodes), represent motion between them. Each edge has associated a weight that is computed based on reachability and map constraints. In our previous work [40], this weight was defined by taking into account the estimated velocity and acceleration at the source node, and by evaluating the reachable velocity and acceleration considering the position of the destination node. The obtained values were then compared with information inferred from the map. Of course, this type of advanced function works well when a reasonable upper bound to the position error can be assumed. Since in this paper we deal with real (as opposed to lab) environments, an acceptable error for every position cannot be guaranteed. Therefore the aforesaid weighting techniques cannot be applied. We then adopt a simpler weighting technique postponing the refinement to the filtering stage. At this stage, we only evaluate the edge weight to exclude the unreachable nodes. Therefore the weight function W is defined over an edge e = (pi,t, pj,t+k) as follows: ⎩ ⎨ ⎧ ∞+ ≤ =otherwise kThmapeifmape mapeW )( ),( ),( ),( µµ (3) where i,j ∈ [1,…,n] and k ∈ [1,…,m]. The function µ calculates the real distance between two nodes pi,t and pj,t+k taking into account the map (presence of buildings, street curves and so on). The threshold Th(k) defines the maximum acceptable distance between each node and it is a function of the time variation k. Using this approach the weights of the edges are in linear relation with the nodes distances. Considering the real environment fluctuation and the fact that the sampling interval is very short (≈500 ms), this assumption is realistic enough for TFT filtering purpose2. Summarizing each edge of the graph has a weight that defines the reachability between the bounded nodes. All maps and motion constraints are enforced by the weight function. By searching the minimum path on the graph (i.e., the path from time t to time t+m with minimum weight), we obtain a preliminary filtered position for the mobile (the nodes included in the obtained path). In our previous work, we used a different weight function that worked using k = 1, meaning that there were no edge between non-temporal consecutive nodes. Once again, we remark that, in real applications, the assumption of a bounded error is too restrictive, and a set of candidates’ nodes can be completely unreachable due to the fluctuation effect. Therefore our TFG needs to take into account also this noise effect. Every node p of the TFG is then associated with a set of nodes St at certain time t as follows: [] tntttpppS ,,2,1 ,,, L= (4) 2 To the best of our knowledge the probability of having an overlapped estimation, over time, is high only in the case of stationary mobile device. St represents the set of the n candidates positions for time t. The distance from a node pi,t to a node pj,t+k is the same as the weight W among them. The distance can be also defined from a node pi,t and a set of nodes St+k as follow: [] )),,((min),,( ,,1, mapppmapSpM ktjtinjktti +∈+ = µ L (5) where M is a distance function from node pi,t to set St+k according to the map. In our TFG graph, two types of edges exist: • edges e between two consecutive nodes, if W≠+∞. • forwarding edges e between two non temporal consecutive nodes. pi,t and pj,t+k, if M(pi,t,St+k,map)≠+∞ and minh=1..k-1(M(pi,t,St+h,map) =+∞. Fig. 3 shows the TGF. Note that in our approach, the choice of parameter m becomes critical. On the one hand, using a high m (i.e., long time prevision), we obtain a “strong trend” prevision that filters out any out-of-trend movement. This result is not acceptable in pedestrian- only areas like a city square, where motion can well be chaotic without any prevalent movement trend. On the other hand, a value too small for m could cause an error dependency, which in turn could produce bad results in high trend-correlation areas like motorways or one-way streets. However, since layer 1 map information permits to distinguish between pedestrian-only areas and motorways, it becomes adequately possible to tune parameter m.3 In this way, we obtain a map correlation of our first-level movement estimates, and we can substantially improve the tracking quality of our lookup table technique (see Section 7 for details). Figure 3. Graph through example for time-forwards tracking. In red the selected position nodes and the selected path, in black the possible position nodes. The dotted line shows an example of an edge between two non consecutive nodes. 3 A similar dynamic tuning of parameter m can be based on the characteristics of user’s vehicle.  100 M. ANISETTI ET AL. Copyright © 2008 SciRes. I. J. Communications, Network and System Sciences. 2008; 1:1-103 Our time-forwarding tracking technique takes full advantage from all available GIS information, such as area classification, so that validation of candidates’ locations depends on map constraints. In many cases, the additional information provided by the map is poor or absent; when this happens, our technique is able to dynamically build an information database by estimating all relevant knowledge including speed and acceleration. 6. Tracking with Constrained Kalman Filtering Using the time-forwarding tracking technique explained in the previous section, we obtain a trusted location measurement zk at time k, which complies with all map constraints taken into account by TFT. This location zk can be associated with a state Xk=[x,y,x',y']T of our mobile device at certain time k, where x and y are the position coordinates and x' and y' define the velocity vector. In general, this state defines a movement trend that already has high confidence and low error, if compared with the actual mobile antenna path (see Fig. 5). To increase its quality, this movement trend is filtered with constrained Kalman filter (CKF) [41], obtaining a robust error and time-deep prevision tracking (Fig. 4 shows our CKF architecture). The Kalman filter module (the white box in Fig. 4) has the following input: i) state position measure zk from TFT that use map layer 1, ii) the uk-1 control input provided by HSMM (Hidden Semi-Markov Model) module, used also in [40], and defined using also map layer 3, iii) constrained function defined on map layer 2. One of the main advantages of this filtering is that it takes into account both measurement error and system error; besides, this one previous-state dependency filtering becomes very usable in real time tracking environment. The Kalman state equation shown in Fig. 4 is defined using the following fundamental matrixes: ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = 1000 0100 010 001 T T A (6) ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = T T T T B 0 0 2 0 0 22 2 (7) ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ =0010 0001 C (8) where T is the time interval between two consecutive observations. The work [40] proposes to use simple Kalman filtering with HSMM module for location in wireless network. The main difference between this approach and ours is that we filter only motion errors and inertia oversight, but we do not filter the error introduced by signal strength prevision. Indeed, the position estimate used to correct the Kalman prevision is already compatible with map constraints and motion characteristics of the mobile antenna. Using this filtering, we improve the accuracy of the mobile terminal’s location. Figure 4. Constrain Kalman filtering architecture. 7. Experimental Results Using three different cellular phones and a GPS antenna, we performed five trips in downtown Milan, over a month of experimentation. The city area we chose, which is near the railway station called Milano Centrale, includes a non-uniform urban environment, with a park and some skyscrapers. All trips were performed both by car and on foot, and had duration varied from 5 minutes to 1 hour. During these trips, information related to serving and neighboring cells coupled with GPS latitude and longitude were collected every 480 ms. We performed two different types of testing, one for evaluating EMF prediction quality and another for assessing geolocation quality with respect to the actual position of a moving cellular phone. Specially, we emphasize the relation between the amount of available environmental information and the quality of predicted EMF. Environmental information is costly to collect and is not likely to be available everywhere. Since our aim is to locate mobile phones, we also investigated the relation between EMF prediction and the amount of filtering. More specifically, in the first type of experiments, we computed EMF using different combinations of information taken from our Type 2 GIS 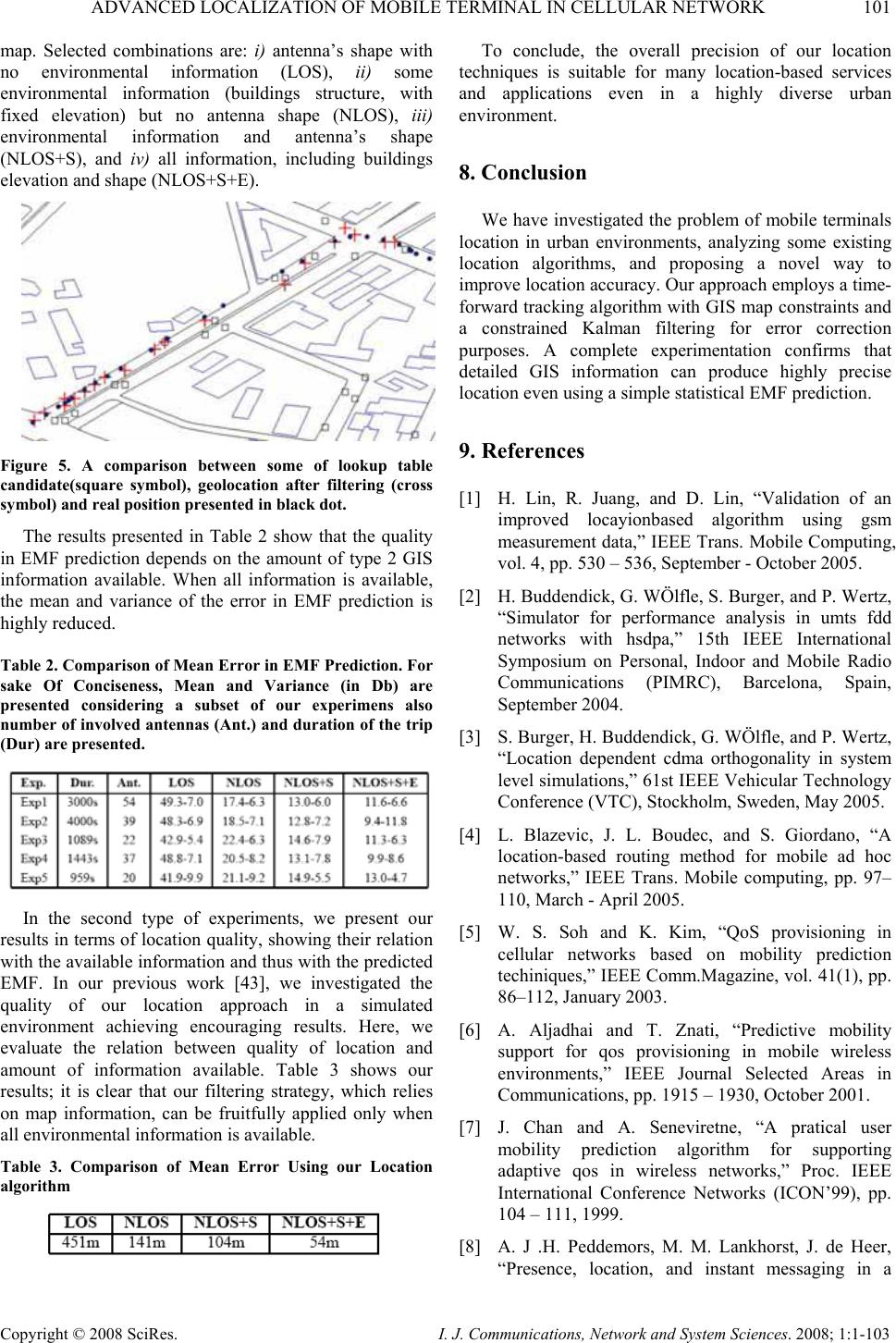 ADVANCED LOCALIZATION OF MOBILE TERMINAL IN CELLULAR NETWORK 101 Copyright © 2008 SciRes. I. J. Communications, Network and System Sciences. 2008; 1:1-103 map. Selected combinations are: i) antenna’s shape with no environmental information (LOS), ii) some environmental information (buildings structure, with fixed elevation) but no antenna shape (NLOS), iii) environmental information and antenna’s shape (NLOS+S), and iv) all information, including buildings elevation and shape (NLOS+S+E). Figure 5. A comparison between some of lookup table candidate(square symbol), geolocation after filtering (cross symbol) and real position presented in blac k dot. The results presented in Table 2 show that the quality in EMF prediction depends on the amount of type 2 GIS information available. When all information is available, the mean and variance of the error in EMF prediction is highly reduced. Table 2. Comparison of Mean Error in EMF Prediction. For sake Of Conciseness, Mean and Variance (in Db) are presented considering a subset of our experimens also number of involved antennas (Ant.) and duration of the trip (Dur) are presented. In the second type of experiments, we present our results in terms of location quality, showing their relation with the available information and thus with the predicted EMF. In our previous work [43], we investigated the quality of our location approach in a simulated environment achieving encouraging results. Here, we evaluate the relation between quality of location and amount of information available. Table 3 shows our results; it is clear that our filtering strategy, which relies on map information, can be fruitfully applied only when all environmental information is available. Table 3. Comparison of Mean Error Using our Location algorithm To conclude, the overall precision of our location techniques is suitable for many location-based services and applications even in a highly diverse urban environment. 8. Conclusion We have investigated the problem of mobile terminals location in urban environments, analyzing some existing location algorithms, and proposing a novel way to improve location accuracy. Our approach employs a time- forward tracking algorithm with GIS map constraints and a constrained Kalman filtering for error correction purposes. A complete experimentation confirms that detailed GIS information can produce highly precise location even using a simple statistical EMF prediction. 9. References [1] H. Lin, R. Juang, and D. Lin, “Validation of an improved locayionbased algorithm using gsm measurement data,” IEEE Trans. Mobile Computing, vol. 4, pp. 530 – 536, September - October 2005. [2] H. Buddendick, G. WÖlfle, S. Burger, and P. Wertz, “Simulator for performance analysis in umts fdd networks with hsdpa,” 15th IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Barcelona, Spain, September 2004. [3] S. Burger, H. Buddendick, G. WÖlfle, and P. Wertz, “Location dependent cdma orthogonality in system level simulations,” 61st IEEE Vehicular Technology Conference (VTC), Stockholm, Sweden, May 2005. [4] L. Blazevic, J. L. Boudec, and S. Giordano, “A location-based routing method for mobile ad hoc networks,” IEEE Trans. Mobile computing, pp. 97– 110, March - April 2005. [5] W. S. Soh and K. Kim, “QoS provisioning in cellular networks based on mobility prediction techiniques,” IEEE Comm.Magazine, vol. 41(1), pp. 86–112, January 2003. [6] A. Aljadhai and T. Znati, “Predictive mobility support for qos provisioning in mobile wireless environments,” IEEE Journal Selected Areas in Communications, pp. 1915 – 1930, October 2001. [7] J. Chan and A. Seneviretne, “A pratical user mobility prediction algorithm for supporting adaptive qos in wireless networks,” Proc. IEEE International Conference Networks (ICON’99), pp. 104 – 111, 1999. [8] A. J .H. Peddemors, M. M. Lankhorst, J. de Heer, “Presence, location, and instant messaging in a 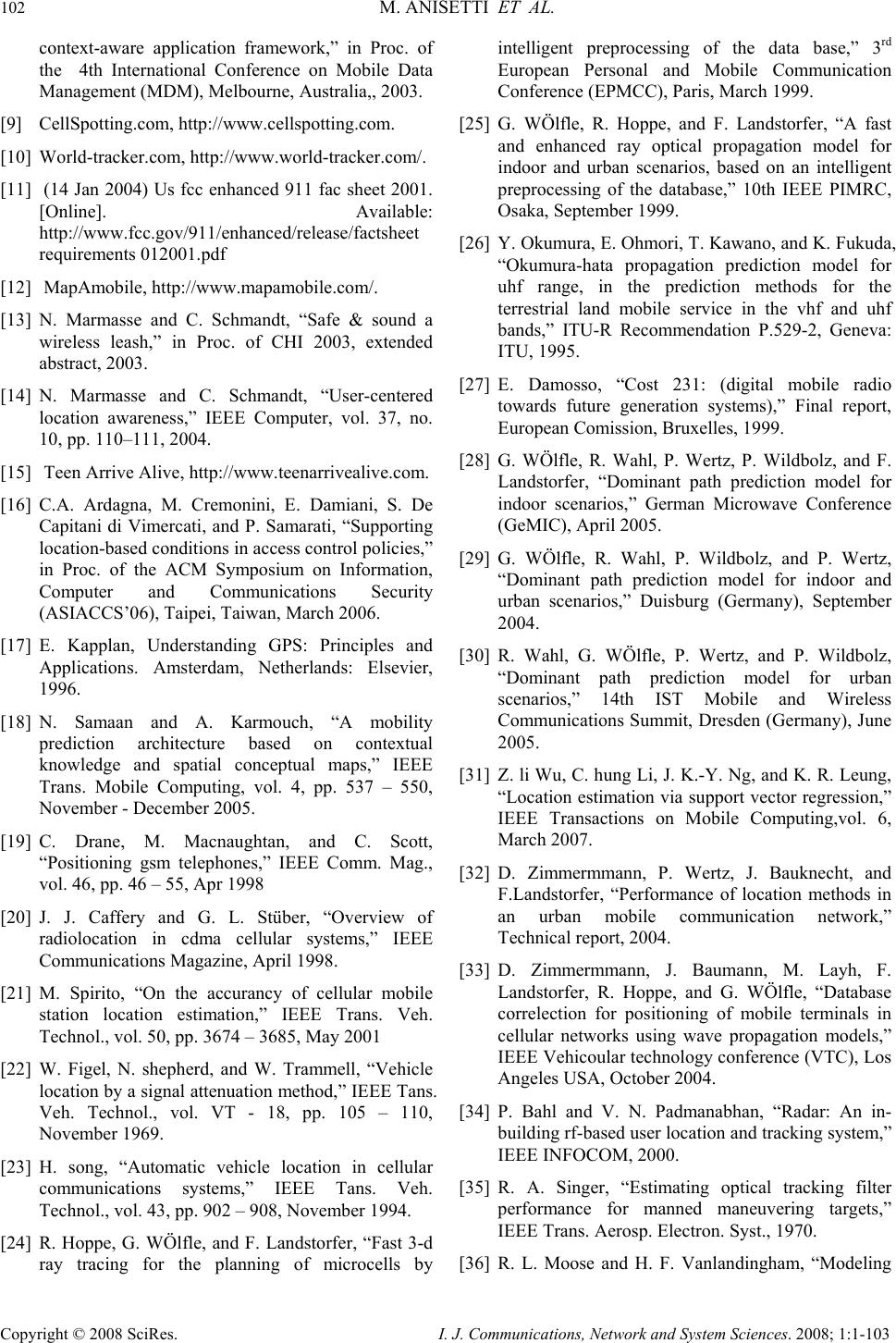 102 M. ANISETTI ET AL. Copyright © 2008 SciRes. I. J. Communications, Network and System Sciences. 2008; 1:1-103 context-aware application framework,” in Proc. of the 4th International Conference on Mobile Data Management (MDM), Melbourne, Australia,, 2003. [9] CellSpotting.com, http://www.cellspotting.com. [10] World-tracker.com, http://www.world-tracker.com/. [11] (14 Jan 2004) Us fcc enhanced 911 fac sheet 2001. [Online]. Available: http://www.fcc.gov/911/enhanced/release/factsheet requirements 012001.pdf [12] MapAmobile, http://www.mapamobile.com/. [13] N. Marmasse and C. Schmandt, “Safe & sound a wireless leash,” in Proc. of CHI 2003, extended abstract, 2003. [14] N. Marmasse and C. Schmandt, “User-centered location awareness,” IEEE Computer, vol. 37, no. 10, pp. 110–111, 2004. [15] Teen Arrive Alive, http://www.teenarrivealive.com. [16] C.A. Ardagna, M. Cremonini, E. Damiani, S. De Capitani di Vimercati, and P. Samarati, “Supporting location-based conditions in access control policies,” in Proc. of the ACM Symposium on Information, Computer and Communications Security (ASIACCS’06), Taipei, Taiwan, March 2006. [17] E. Kapplan, Understanding GPS: Principles and Applications. Amsterdam, Netherlands: Elsevier, 1996. [18] N. Samaan and A. Karmouch, “A mobility prediction architecture based on contextual knowledge and spatial conceptual maps,” IEEE Trans. Mobile Computing, vol. 4, pp. 537 – 550, November - December 2005. [19] C. Drane, M. Macnaughtan, and C. Scott, “Positioning gsm telephones,” IEEE Comm. Mag., vol. 46, pp. 46 – 55, Apr 1998 [20] J. J. Caffery and G. L. Stüber, “Overview of radiolocation in cdma cellular systems,” IEEE Communications Magazine, April 1998. [21] M. Spirito, “On the accurancy of cellular mobile station location estimation,” IEEE Trans. Veh. Technol., vol. 50, pp. 3674 – 3685, May 2001 [22] W. Figel, N. shepherd, and W. Trammell, “Vehicle location by a signal attenuation method,” IEEE Tans. Veh. Technol., vol. VT - 18, pp. 105 – 110, November 1969. [23] H. song, “Automatic vehicle location in cellular communications systems,” IEEE Tans. Veh. Technol., vol. 43, pp. 902 – 908, November 1994. [24] R. Hoppe, G. WÖlfle, and F. Landstorfer, “Fast 3-d ray tracing for the planning of microcells by intelligent preprocessing of the data base,” 3rd European Personal and Mobile Communication Conference (EPMCC), Paris, March 1999. [25] G. WÖlfle, R. Hoppe, and F. Landstorfer, “A fast and enhanced ray optical propagation model for indoor and urban scenarios, based on an intelligent preprocessing of the database,” 10th IEEE PIMRC, Osaka, September 1999. [26] Y. Okumura, E. Ohmori, T. Kawano, and K. Fukuda, “Okumura-hata propagation prediction model for uhf range, in the prediction methods for the terrestrial land mobile service in the vhf and uhf bands,” ITU-R Recommendation P.529-2, Geneva: ITU, 1995. [27] E. Damosso, “Cost 231: (digital mobile radio towards future generation systems),” Final report, European Comission, Bruxelles, 1999. [28] G. WÖlfle, R. Wahl, P. Wertz, P. Wildbolz, and F. Landstorfer, “Dominant path prediction model for indoor scenarios,” German Microwave Conference (GeMIC), April 2005. [29] G. WÖlfle, R. Wahl, P. Wildbolz, and P. Wertz, “Dominant path prediction model for indoor and urban scenarios,” Duisburg (Germany), September 2004. [30] R. Wahl, G. WÖlfle, P. Wertz, and P. Wildbolz, “Dominant path prediction model for urban scenarios,” 14th IST Mobile and Wireless Communications Summit, Dresden (Germany), June 2005. [31] Z. li Wu, C. hung Li, J. K.-Y. Ng, and K. R. Leung, “Location estimation via support vector regression,” IEEE Transactions on Mobile Computing,vol. 6, March 2007. [32] D. Zimmermmann, P. Wertz, J. Bauknecht, and F.Landstorfer, “Performance of location methods in an urban mobile communication network,” Technical report, 2004. [33] D. Zimmermmann, J. Baumann, M. Layh, F. Landstorfer, R. Hoppe, and G. WÖlfle, “Database correlection for positioning of mobile terminals in cellular networks using wave propagation models,” IEEE Vehicoular technology conference (VTC), Los Angeles USA, October 2004. [34] P. Bahl and V. N. Padmanabhan, “Radar: An in- building rf-based user location and tracking system,” IEEE INFOCOM, 2000. [35] R. A. Singer, “Estimating optical tracking filter performance for manned maneuvering targets,” IEEE Trans. Aerosp. Electron. Syst., 1970. [36] R. L. Moose and H. F. Vanlandingham, “Modeling 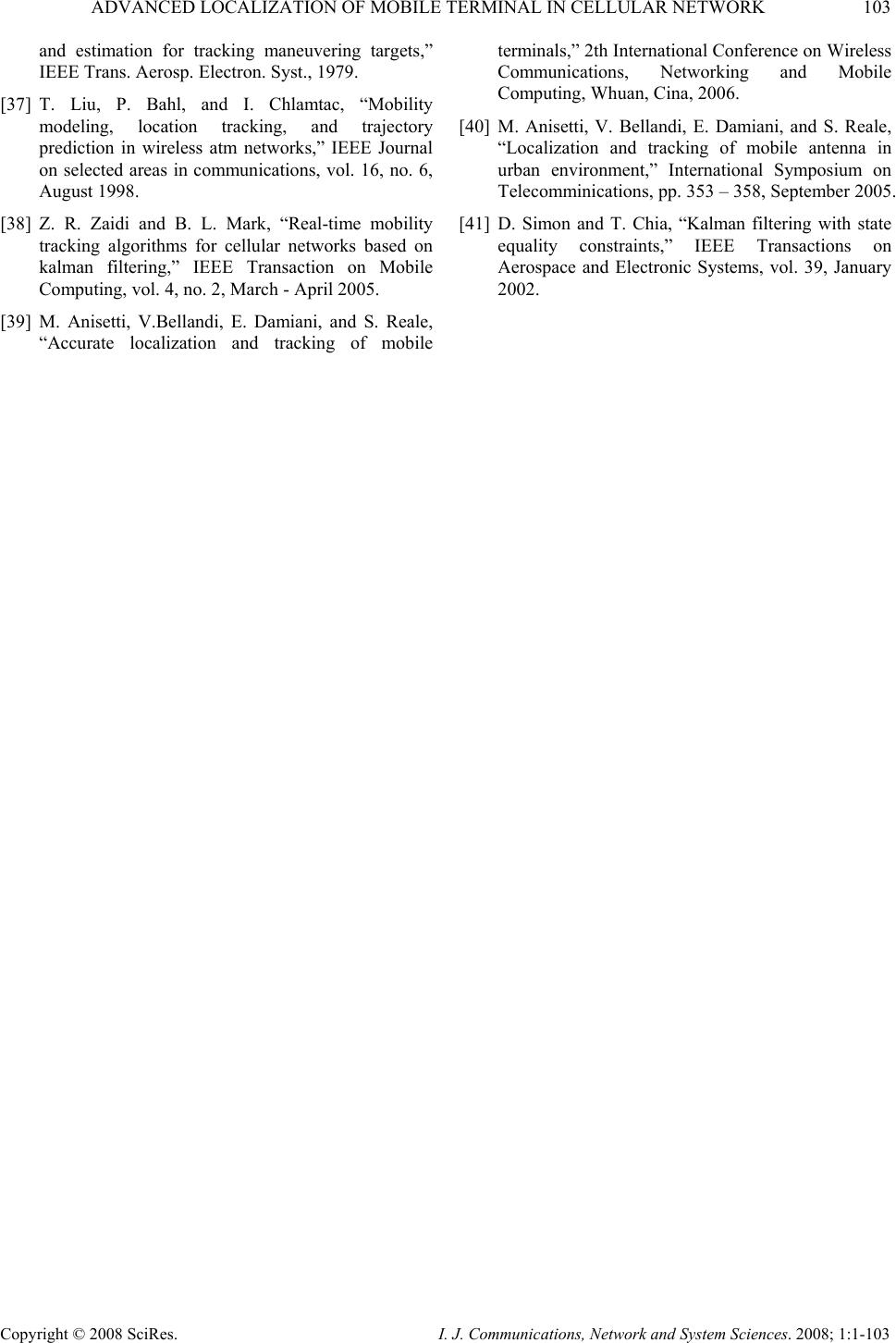 ADVANCED LOCALIZATION OF MOBILE TERMINAL IN CELLULAR NETWORK 103 Copyright © 2008 SciRes. I. J. Communications, Network and System Sciences. 2008; 1:1-103 and estimation for tracking maneuvering targets,” IEEE Trans. Aerosp. Electron. Syst., 1979. [37] T. Liu, P. Bahl, and I. Chlamtac, “Mobility modeling, location tracking, and trajectory prediction in wireless atm networks,” IEEE Journal on selected areas in communications, vol. 16, no. 6, August 1998. [38] Z. R. Zaidi and B. L. Mark, “Real-time mobility tracking algorithms for cellular networks based on kalman filtering,” IEEE Transaction on Mobile Computing, vol. 4, no. 2, March - April 2005. [39] M. Anisetti, V.Bellandi, E. Damiani, and S. Reale, “Accurate localization and tracking of mobile terminals,” 2th International Conference on Wireless Communications, Networking and Mobile Computing, Whuan, Cina, 2006. [40] M. Anisetti, V. Bellandi, E. Damiani, and S. Reale, “Localization and tracking of mobile antenna in urban environment,” International Symposium on Telecomminications, pp. 353 – 358, September 2005. [41] D. Simon and T. Chia, “Kalman filtering with state equality constraints,” IEEE Transactions on Aerospace and Electronic Systems, vol. 39, January 2002. |