Journal of Transportation Technologies, 2012, 2, 334-338
http://dx.doi.org/10.4236/jtts.2012.24036 Published Online October 2012 (http://www.SciRP.org/journal/jtts)
Design and Stability Analysis of Fuzzy Switched PID
Controller for Ship Track-Keeping*
Baozhu Jia1,2, Hui Cao2, Jie Ma1
1State Key Laboratory of Ocean Engineering, Shanghai Jiao Tong University, Shanghai, China
2Marine Engineering College, Dalian Maritime University, Dalian, China
Email: jiabzh@gmail.com
Received July 25, 2012; revised August 23, 2012; accepted September 10, 2012
ABSTRACT
The fuzzy switched PID controller which combines fuzzy PD and conventional PI controller is proposed for ship
track-keeping autopilot In this paper. By using rudder angle, the whole voyage is divided into two operating regimes
which named transient operating regime and steady operating regime respectively. The fuzzy PD controller is employed
in transient operating regime for increasing response, reducing overshoot and shorting transition time. And conventional
PI controller is used to improve the stable accuracy in steady operating regime. The global controller is achieved by
fuzzy blending of all local controllers. Routh stability criterion is utilized to obtain the stability condition of closed-loop
system. The simulation results show the effectiveness of proposed method.
Keywords: Ship Control; Fuzzy Switched PID; Track-Keeping; Fuzzy Operating Regime; Stability Condition
1. Introduction
Ship autopilot mainly used to keep the course at designed
trajectory within minimum deviation. In terms of charac-
teristics of nonlinear and underactuated of cargo ship,
finding an effective autopilot control algorithm has been
the significant topic in area of ship steering control. This
has evoked interest into the field of autopilot in marine
cargo ship controlling community recently. Fossen, et al.
proposed adaptive controller to improve performance and
reduce fuel consumption on both of course-keeping and
course-changing maneuvers [1]. In [2], the problem is
solved by the adaptive robust fuzzy method, which called
state input-output theory is adopted. The work in [3] has
proposed adjust ship course by using track error-driven
control algorithm.
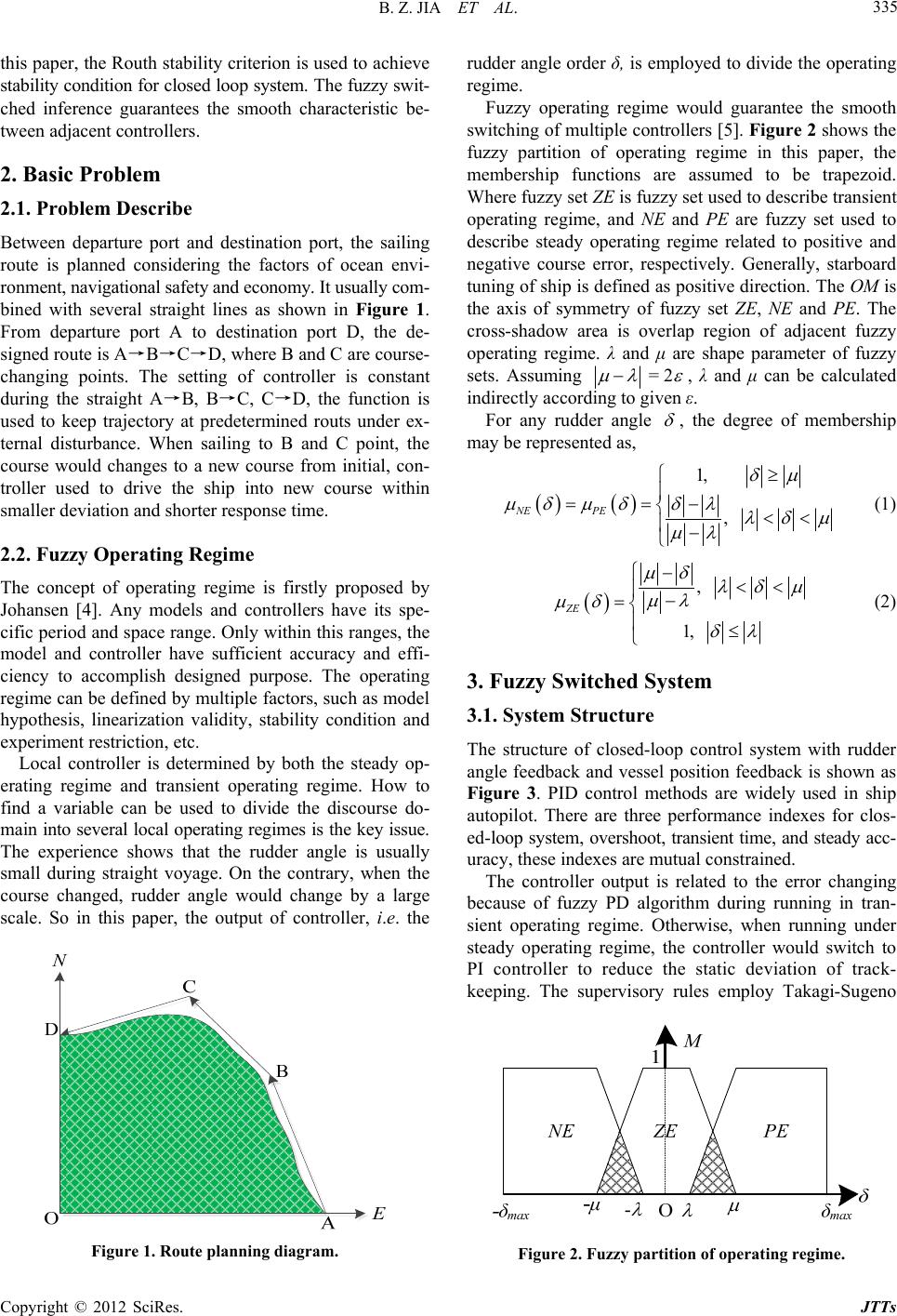
Ship voyage involves several straight-line segmenta-
tions. During straight-line voyage, the control require-
ment mainly focuses on stable accuracy, which are called
tack-keeping. Rudder angle changes frequently and the
controller output is small. Most of time, autopilot oper-
ating in the mode of track-keeping process, so we called
is as steady operating regime in this paper. Whereas,
when the ship changing into a new direction from origi-
nal course, the control requirements mainly depends on
response, overshoot and transition time, what are named
course-changing process, the controller provides a larger
control signal to achieve faster response. There are do-
zens of course-changing points in whole voyage, what
depends on the ocean environment and port of destina-
tion as well. When course error decreasing, the controller
outputs would gradually reduce according to control laws.
The course-changing process is generally short-term and
countable, so it can be called transient operating regime.
The good control strategy could adaptively switch to
the most matching control law based on operating regime
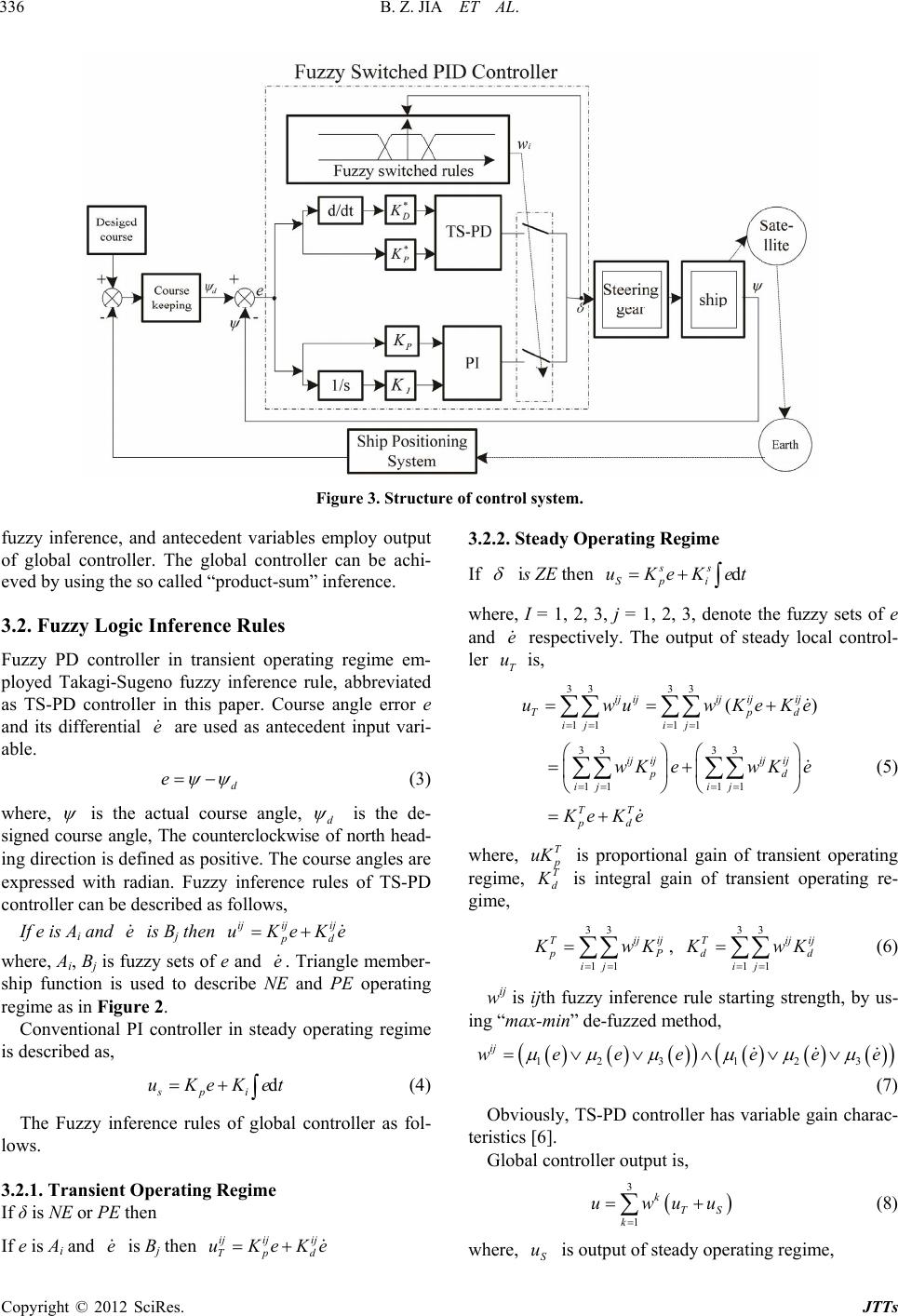
according to switching rules. The fuzzy switching PID
control algorithm combines Takagi-Sugeno PD controller
with general PI controller to improve the control per-
formance in terms of fast response and high stable accu-
racy throughout the voyage. During track-keeping proc-
ess, the so called TS-PD controller is employed to keep
the stability accuracy, and when course-changing process,
the general PD controller is used to improve the response
speed. The TS-PD controller and general PI controller
switched according to the operating regime switching
rules.
Fuzzy logic has been proved to be an universal ap-
proximator for any real continuous function. It can be
constructed in many different configurations. However,
since Takagi-Sugeno fuzzy inference is nonlinear in na-
ture, we utilize it to construct the supervisory rules. The
global controller output is used to be antecedent variable
of supervisory rules. The stability of fuzzy control sys-
tems may not be easily analyzed. Lyapunov approach
and variable structure or the phase-plane approach nor-
mally be employed. Besides, it is difficult to find a
common Lyapunov’s function for a fuzzy controller. In
C
opyright © 2012 SciRes. JTTs