Paper Menu >>
Journal Menu >>
 Engineering, doi:10.4236/en g Copyright © 2 0 Ge n Reali s 1 Depart m 2 Dep a Abstract The process submarine l a from subma r linear down the positive x a depression tion in the v e Fourier in s p water depth a fication fact o and widths h for different gation wave f Keywords: N a 1. Introdu c Tsunamis are sive perturba t b ottom displ a submarine la n mis with larg e the coasts o f significant ad v thematical m o eration, prop a erated by seis m Tsunamis a such as sub m large earthqu a column as s e 2010, 2, 529- 5 g .2010.27070 P u 0 10 SciRes. n eratio n s tic Cu r in Li n Hossam S h m ent of Basic a a rtment of En g Rece i of tsunami e a ndslides bas e r ine gravity m and uplift fa u x -direction t o slump, and a e locity of th e p ace, tsuna m a re analyzed o r of the tsu n h as been stud propagation f orms after t h N ea r -Far Fiel d a nd Slides, L a c tion surface wate r t ion of the se a a cement due t n dslides can a e and comple x f narrow bays v ances have b o dels to descr i a gation and ru n m ic seafloor d a re also gen e m arine landsli d a kes, and ca n e diment and r 5 49 u blished Onlin e n and P r viline a n earize d h awky Hass a a nd Applied S c Technolo g g ineering Mat h i ved F ebruary e volution dur i e d on a two- d m ass flows i s u lting with r i o a significa n a displaced a e accumulati o m i waveform s analytically n ami generat i ied and the r e lengths, wid h e slide stops d Tsunami A a place and F o r waves cause d a . Apart from t o earthquake s a lso produce l x wave runup e and fjords. I b een made in d i be the entire p n -up of a tsu n d eformation, [ 1 e rated by oth d es, which o f n disturb the o ock slump d o e July 2010 (htt p ro p ag a a r Slide d Shall o a n 1 , Khaled T c ience, Colleg e g y and Mariti m h ematics and P A lex a E-mail: h 8, 2010; revi s i ng its gener a d imensional c s described i n i se time. Th e n t length to p r a ccumulation o n slide (blo c s within the f for the mov a i on by the s u e sults are pl o ths and wate r moving at d i m plitudes, S h o urier Transf o d by the imp u co-seismic s e s , subaerial a n l ocalized tsun a e specially alo n I n recent yea r d eveloping m a p rocess of ge n n ami event ge n 1 -3]. er mechanis m f ten accompa n o verlying wat e o wn slope. T h p ://www.SciRP. o a tion of Shape o w-Wa t T awfik Ra m e of Engineeri n m e Transpor t , P hysics, F acu l a ndria, Egypt h ossams@aast . s ed April 5, 20 a tion under t h c urvilinear sl i n three stage s e second stag r oduce curvi l slide model . c k slide). By u f rame of the a ble source m u bmarine slu m o tted. Compa r r depths. In a i fferent prop a h allow Wate r o rms u l- e a n d a - n g r s, a - n - n - m s n y e r h e comm o slopes sedim e organi c the ma j The fa i type o f range o avalan c which p lace l a b ris or the de b absorb “mega - In t e o rg/journal / eng ) Tsuna m with V t er Wa v m adan 1 , Sar w n g & Technol o Alexandria, E l ty of Enginee r . edu 10; accepted A h e effect of t i de model is s . The first st e represente d l inear two-di m . The last sta g u sing transfo linearized s h m odel. Effect m p and slide r ison of tsun a a ddition, we a gation time s r Theory, W a o n mechanism are ove r -ste e e nts, generatio n c matter, stor m j or cause of l a i led material i f geophysical o f ground mo v c hes and rock generate tsun a a rge volumes expansion is b ris falls at a r it. They ha v - tsunami”. e rms of tsuna m ) m i by a V ariable v e The o w at Nageeb H o gy, A rab Aca d Eg yp t r ing, A lexand r A pril 13, 2010 t he variable v investigated. a ge represen t d by a unilat e m ensional m o g e represent e rms method, h allow wate r of the water d for different a mi peak am p demonstrate d s . a ter Wave, S u s for triggerin e pening due t o n of gas creat e m waves, and e a ndslides on c i s driven by t h mass flow w v ement such a falls can crea t a mis. These p h of water, as e n transferred t o r ate faster tha n v e been na m m i-generation Movin Veloci t o ry H anna 2 d emy for Scie n r ia University, v elocities of r Tsunami ge n t ed by a rapi d e rally propa g o dels repres e e d by the ti m Laplace in t i r theory for c d epths on th e propagation p litudes is d i d the tsunam i u bmarine Sl u g failure of s u o rapid depo s e d by decomp o e arthquakes, w c ontinental sl o h e gravity for c w hich include s a s debris flow t e submarine l h enomena rap n ergy from fa o the water in t n the ocean w m ed by the m mechanisms, ENG 205 g t ies n ce, r ealistic n eration d curvi- g ation in e nted by m e varia- i me and c onstant e ampli- lengths i scussed i propa- u mps u bmarine s ition of o sition of w hich are o pes, [4]. c es. Any s a wide s, debris l andslide idly dis- lling de- t o which w ater can m edia as two sig- 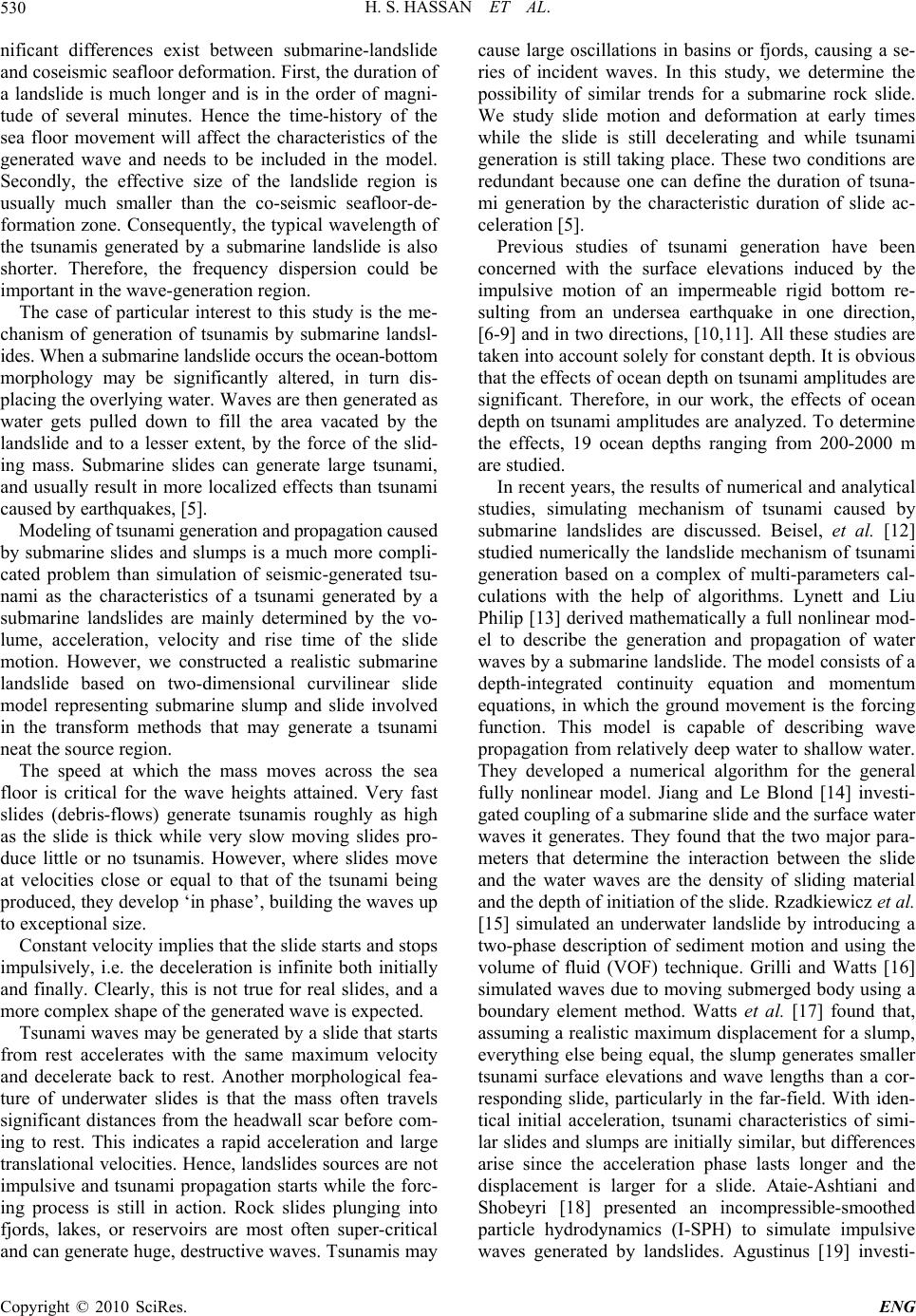 H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 530 nificant differences exist between submarine-landslide and coseismic seafloor deformation. First, the duration of a landslide is much longer and is in the order of magni- tude of several minutes. Hence the time-history of the sea floor movement will affect the characteristics of the generated wave and needs to be included in the model. Secondly, the effective size of the landslide region is usually much smaller than the co-seismic seafloor-de- formation zone. Consequently, the typical wavelength of the tsunamis generated by a submarine landslide is also shorter. Therefore, the frequency dispersion could be important in the wave-generation region. The case of particular interest to this study is the me- chanism of generation of tsunamis by submarine landsl- ides. When a submarine landslide occurs the ocean-bottom morphology may be significantly altered, in turn dis- placing the overlying water. Waves are then generated as water gets pulled down to fill the area vacated by the landslide and to a lesser extent, by the force of the slid- ing mass. Submarine slides can generate large tsunami, and usually result in more localized effects than tsunami caused by earthquakes, [5]. Modeling of tsunami generation and propagation caused by submarine slides and slumps is a much more compli- cated problem than simulation of seismic-generated tsu- nami as the characteristics of a tsunami generated by a submarine landslides are mainly determined by the vo- lume, acceleration, velocity and rise time of the slide motion. However, we constructed a realistic submarine landslide based on two-dimensional curvilinear slide model representing submarine slump and slide involved in the transform methods that may generate a tsunami neat the source region. The speed at which the mass moves across the sea floor is critical for the wave heights attained. Very fast slides (debris-flows) generate tsunamis roughly as high as the slide is thick while very slow moving slides pro- duce little or no tsunamis. However, where slides move at velocities close or equal to that of the tsunami being produced, they develop ‘in phase’, building the waves up to exceptional size. Constant velocity implies that the slide starts and stops impulsively, i.e. the deceleration is infinite both initially and finally. Clearly, this is not true for real slides, and a more complex shape of the generated wave is expected. Tsunami waves may be generated by a slide that starts from rest accelerates with the same maximum velocity and decelerate back to rest. Another morphological fea- ture of underwater slides is that the mass often travels significant distances from the headwall scar before com- ing to rest. This indicates a rapid acceleration and large translational velocities. Hence, landslides sources are not impulsive and tsunami propagation starts while the forc- ing process is still in action. Rock slides plunging into fjords, lakes, or reservoirs are most often super-critical and can generate huge, destructive waves. Tsunamis may cause large oscillations in basins or fjords, causing a se- ries of incident waves. In this study, we determine the possibility of similar trends for a submarine rock slide. We study slide motion and deformation at early times while the slide is still decelerating and while tsunami generation is still taking place. These two conditions are redundant because one can define the duration of tsuna- mi generation by the characteristic duration of slide ac- celeration [5]. Previous studies of tsunami generation have been concerned with the surface elevations induced by the impulsive motion of an impermeable rigid bottom re- sulting from an undersea earthquake in one direction, [6-9] and in two directions, [10,11]. All these studies are taken into account solely for constant depth. It is obvious that the effects of ocean depth on tsunami amplitudes are significant. Therefore, in our work, the effects of ocean depth on tsunami amplitudes are analyzed. To determine the effects, 19 ocean depths ranging from 200-2000 m are studied. In recent years, the results of numerical and analytical studies, simulating mechanism of tsunami caused by submarine landslides are discussed. Beisel, et al. [12] studied numerically the landslide mechanism of tsunami generation based on a complex of multi-parameters cal- culations with the help of algorithms. Lynett and Liu Philip [13] derived mathematically a full nonlinear mod- el to describe the generation and propagation of water waves by a submarine landslide. The model consists of a depth-integrated continuity equation and momentum equations, in which the ground movement is the forcing function. This model is capable of describing wave propagation from relatively deep water to shallow water. They developed a numerical algorithm for the general fully nonlinear model. Jiang and Le Blond [14] investi- gated coupling of a submarine slide and the surface water waves it generates. They found that the two major para- meters that determine the interaction between the slide and the water waves are the density of sliding material and the depth of initiation of the slide. Rzadkiewicz et al. [15] simulated an underwater landslide by introducing a two-phase description of sediment motion and using the volume of fluid (VOF) technique. Grilli and Watts [16] simulated waves due to moving submerged body using a boundary element method. Watts et al. [17] found that, assuming a realistic maximum displacement for a slump, everything else being equal, the slump generates smaller tsunami surface elevations and wave lengths than a cor- responding slide, particularly in the far-field. With iden- tical initial acceleration, tsunami characteristics of simi- lar slides and slumps are initially similar, but differences arise since the acceleration phase lasts longer and the displacement is larger for a slide. Ataie-Ashtiani and Shobeyri [18] presented an incompressible-smoothed particle hydrodynamics (I-SPH) to simulate impulsive waves generated by landslides. Agustinus [19] investi-  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 531 gated the breaking of long-waves propagating on shallow water with nonlinear friction on the sloping bottom. He found from his numerical results that in order to over- come wave breaking, nonlinear friction needs to be be- low certain level. Also, laboratory experimental studies on tsunami generation by a rigid solid body moving along the slope have been carried out by many research- ers, [20-25]. The speed at which the mass moves across the sea floor is critical for the wave heights attained. Very fast slides (debris-flows) generate tsunamis roughly as high as the slide is thick while very slow moving slides pro- duce little or no tsunamis. However, where slides move at velocities close or equal to that of the tsunami being produced, they develop ‘in phase’, building the waves up to exceptional size, [26]. The transient wave generation due to the coupling between the slide deformation and time variations in the moving velocity and the free sur- face has been considered by Trifunac et al. [27]. They discussed the effect of variable speeds of spreading of submarine slumps and slides on the near-field tsunami amplitudes. They illustrated the nature and the extent of variations in the tsunami waveforms caused by simple time variations of the frontal velocity of spreading for two-dimensional kinematic models of slides and slumps and compared the results with those for slide spreading with constant velocity. They found that the overall nature of the near-field tsunami amplitudes depended on the overall average speed of slumping and sliding remains unchanged, with respect to their previous studies in [6-9] with constant velocities of spreading. Hayir [28] investi- gated the motion of a submarine block slide with variable velocities and its effects on the near-field tsunami am- plitudes. He found that the amplitudes generated by the slide are almost the same as those created by its average velocity. Both Trifunac et al. [27] and Hayir [28] used very simple kinematic source models represented by a Heaviside step functions for representing the generation and propagation of tsunami. Therefore, in this paper, we concern about the tsunami amplitudes predicted in the near-field caused by time variation of a two-dimensional realistic curvilinear slide model. The curvilinear tsunami source model we consi- dered based on available geological, seismological, and tsunami elevation. This model resembles the initial source predicted according to the initial disturbance rec- orded in [29,30]. At present, it is difficult to describe the details of movements at the ocean floor during sliding because of the paucity of high frequency inverse studies of ground deformations in the source area of past tsuna- mi, [31]. Therefore, the basic idea is to illustrate the possible range of tsunami amplitudes using realistic source model. The aim of this study is to determine how near-field tsunami amplitudes change according to variable veloci- ties of submarine slide. We discuss the nature and the extent of variations in the peak tsunami waveforms caused by time variations of the frontal velocity and the deceleration for the two-dimensional curvilinear block slide model and compares the results with those for the slide moving with constant velocity. It will show how the changes in the slide velocity as function in time acts to reduce wave focusing. Numerical results are presented for the normalized peak amplitude as a function of the propagation length and width of the slump and the slide, the water depth, the time variation of moving velocity and the deceleration of the block slide. The problem is solved using linearized shallow-water theory for constant water depth by transform methods (Laplace in time and Fourier in space), with the forward and inverse Laplace transforms computed analytically, and the inverse Fourier transform computed numerically by the Inverse Fast Fourier Transform (IFFT). Particular cases are compared with the results obtained by Trifunac et al. [9] and Hayir [28]. 2. Mathematical Formulation of the Problem Consider a three dimensional fluid domain as shown in Figure 1. It represents the ocean above the submarine slump and slide area. It is bounded above by the free surface of the ocean ,,zxyt and below by the rigid ocean floor ,,,zhxy xyt , where ,, x yt is the free surface elevation, ,hxy is the water depth and ,, x yt is the sea floor displacement function. The domain is unbounded in the horizontal direc- tions x and y, and can be written as 2, R hxy ,, ,,, x yt xyt . For simplicity, before the earth- quake, ,hxy is assumed to be a constant and the fluid is assumed to be at rest, thus the free surface and the ,,0 x y ,,0xy h Ω z 0 0 y 0 x Figure 1. Fluid domain and coordinate system for a very rapid movement of the assumed source model.  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 532 solid boundary are defined by 0z and z h , re- spectively. Mathematically, these conditions can be written in the form of initial conditions: ,,0xy ,,0 0xy . At time 0t the bottom boundary moves in a prescribed manner given by z h ,, x yt The deformation of the sea bottom is assumed to have all the necessary properties needed to compute its Fourier transforms in , x y and its Laplace transform in t. The resulting deformation of the free surface ,,zxyt is to be found as a part of the solution. It is assumed that the fluid is incompressible and the flow is irrotational. The former implies the existence of a ve- locity potential function ,,, x yzt which fully de- scribes the flow and the physical process. By definition, the fluid velocity vector can be expressed as q Thus, ,,, x yzt must satisfy the Laplace’s equation 2,,,0where ,,xyzt xyz (1) Also, ,,, x yzt must satisfy the following kine- matic and dynamic boundary conditions on the free sur- face and the solid boundary, respectively on, , ztxxyy zxyt (2) on, , ztxxyy zh xyt (3) and 2 10on ,, 2 t g zxyt (4) where g is the acceleration due to gravity. As de- scribed above, the initial conditions are given by ,,,0,,0,,0 0xyz xyxy (5) The solution of (1)-(4) for a prescribed bed movement ,, x yt is inherently difficult owing to the nonlinear terms in the boundary conditions and the unknown loca- tion of the free surface a priori. The usual procedure for solving problems of this type is to circumvent these dif- ficulties by substituting a linear approximation for the complete description of wave motion. In this approxima- tion the nonlinear terms in the boundary conditions are omitted and the resulting equations are applied at the initial position of the boundaries. 2.1. Linear Shallow Water Theory Various approximations can be considered for the full water-wave equations. One is the system of Boussinesq equations that retains nonlinearity and dispersion up to a certain order. Boussinesq model is used to study transient varying bottom problems. Fuhrman and Madsen [32] and Zhao et al. [33] presented a developed numerical model based on the highly accurate Boussinesq-type formula- tion subjected to exact expressions for the kinematic and dynamic free surface conditions. Their results show that the model was capable of treating the full life cycle of tsunami evolution, from the initial generation of bottom movements, to the subsequent propagation, and through the final run-up process. Reasonable computational effi- ciency has been demonstrated in their work, which made the model attractive for practical coastal engineering studies, where high dispersive and nonlinear accuracy is sought. Another one is the system of nonlinear shal- low-water equations that retains nonlinearity but no dis- persion. Solving this problem is a difficult task due to the nonlinearities and the priori unknown free surface. The simplest one is the system of linear shallow-water equa- tions. The concept of shallow water is based on the smallness of the ratio between water depth and wave length. In the case of tsunamis propagating on the sur- face of deep oceans, one can consider that shallow-water theory is appropriate because the water depth (typically several kilometers) is much smaller than the wave length (typically several hundred kilometers), which is reasona- ble and usually true for most tsunamis triggered by sub- marine earthquakes, slumps and slides, [34,35]. Hence, the problem can be linearized by neglecting the nonlinear terms in the boundary conditions (2)-(4) and if the boun- dary conditions are applied on the nondeformed instead of the deformed boundary surfaces (i.e. z h and on 0z instead ,,zh xyt of and ,,zxyt ). The linearized problem in dimensional variables can be written as 22 ,,,0where ,,,0 x yztxyz Rh (6) subjected to the following boundary conditions on 0 zt z (7) on zt zh (8) 0on 0 tgz (9) The linearized shallow water solution can be obtained by the Fourier-Laplace transforms. 2.2. Solution of the Problem Our interest is focused on the resulting uplift of the free surface elevation ,, x yt . An analytical analysis is to examine and illustrate the generation and propagation of the tsunami for a given bed profile ,, x yt . Mathe- matical modeling of waves generated by vertical and  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 533 lateral displacements of ocean bottom using the com- bined Fourier–Laplace transforms of the Laplace equa- tion analytically is the simplest way of studying tsunami development. All our studies took into account constant depth for which the Laplace and Fast Fourier Transform (FFT) methods could be applied. Equations (6)-(9) can be solved by using the method of integral transforms. We apply the Fourier transform in (x, y) given by 12 2 12 ˆ,, ikxk y R f fkkfxye dxdy with its inverse transform 12 2 1 121 2 2 1 ˆˆ ,, 2 ikxk y R f fxyfkke dkdk and the Laplace transform in time t, £ 0 st g Gsgte dt For the combined Fourier and Laplace transforms, the following notation is introduced £ 12 ,,, , f xytF kks 12 20,, ikxkyst Redxdyfxytedt Combining (7) and (9) yields the single free-surface condition ,,0,,,0, 0 tt z xy tgxy t (10) and the bottom condition (8) will be ,, ,,, zt x yht xyt (11) The solution of the Laplace Equation (6) which satis- fies the boundary conditions (10)-(11) can be obtained by using the Fourier-Laplace transforms method. First, by applying the transforms method to the Lap- lace equation (6), gives F£ F£ F£ 0 (12) By using the property nn n df ikF k x , (12) will be 22 121 212 ,,,,,, 0 tt kk zskkkk zs (13) Second, by applying the transforms method to the boundary conditions (10)-(11) and the initial conditions (5), yields 2 12 12 ,,0,,,0, 0 z skksgkks (14) and 12 12 ,,,,, zkkhsskk s (15) The transformed free-surface elevation can be ob- tained from (9) as 12 12 ,, ,,0, s kk skks g (16) The general solution of (13) will be 12 12 12 ,,, ,,cosh ,,sinh kk zsAkk skz Bk kskz (17) where 22 12 kkk . The functions 12 ,, A kk s and 12 ,,Bk ks can be found from the boundary conditions (14)-(15) as follows For the bottom condition (at z h ): 12 ,, ,sinh cosh kk hs A kkhBkkh z (18) Substituting from (18) into (15), yields 12 sinhcosh, , A kkhBk khskks (19) For the free surface condition (at 0z): 12 12 ,, ,and, ,0, kk hsBkkksA z (20) Substituting from (20) into (14), gives 2 g k A B s (21) Using (21), (19) can be written as 12 2 cosh1tanh, , gk Bkkhkhsk ks s (22) From which, 12 12 2 ,, ,, cosh tanh gskks Ak kskhsgkkh , 3 12 12 2 ,, ,, cosh tanh skks Bk kskkhsgkkh . Substituting the expressions for the functions 12 ,, A kk s and 12 ,,Bk ks in (17) yields, 12 12 22 2 ,, ,,, cosh cosh sinh gskks kk zskhs s kz kz gk (23)  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 534 where tanh g kkh is the circular frequency of the wave motion. The free surface elevation 12 ,,kk s can be ob- tained from (16) as 2 12 12 22 ,, ,, cosh skks kk skh s (24) A solution for ,, x yt can be evaluated for spe- cified ,, x yt by computing approximately its trans- form 12 ,,kk s then substituting it into (24) and in- verting 12 ,,kk s to obtain ,, x yt We are con- cerned now to evaluate ,, x yt by transforming ana- lytically the assumed source model then inverting 12 ,,kk s using the inverse Laplace Transform to ob- tain 12 ,,kkt which is further converted to ,, x yt by using double inverse Fourier Transform. The circular frequency describes the dispersion relation of tsunamis and implies phase velocity ck and group velocity d Udk . Hence, tanh g kh ck , and 12 1 2sinh2 kh Uc kh . Since, 2 k , hence as 0kh, both cgh and Ugh, which implies that the tsunami velocity t vgh for wavelengths λ long compared to the water depth h. The above linearized solution is known as the shallow water solution. We considered three stages for the mechanism of the tsunami generation caused by submarine gravity mass flows, initiated by a rapid curvi- linear down and uplift faulting with rise time 1 0tt , then propagating unilaterally in the positive x-direction with time 1 ttt , to a length L both with finite veloc- ity v to produce a depletion and an accumulation zones. The last stage represented by the time variation in the velocity of the accumulation slide (block slide) moving in the x-direction with time max ttt and decelera- tion , where max t is the maximum time that the slide takes to stop with minimum deceleration min . In the y-direction, the models propagate instantaneously. The set of physical parameters used in the problem are given in Table 1. The first and second stages of the bed motion are Table 1. Parameters used in the analytical solution of the problem. Parameters First stage Second stage -Source width, W, km 100 100 -Whole width in 1st Stage and Propagation length in 2nd Stage, km W’ = 100 L = 150 -Water depth (uniform), h, km 2 2 -Acceleration due to gravity, g, km/sec2 0.0098 0.0098 -Tsunami velocity, t vgh, km/sec 0.14 0.14 -Moving velocity, v, km/sec 0.14 0.14 -Duration of the source process, t, min 1 50 5.95tv 200 23.8tv shown in Figures 2 and 3, respectively, and given by: 1) First Stage: Curvilinear down and Uplift Faulting down 0 0 0 ,, 1 cos1cos150, 250 100 5050, 15050, 1cos , 50 5050, 5050, 1 cos1 cos50, 250100 5050, 50150. xyt vt xy W xy vt x W xy vt xy W xy (25) up 0 0 0 ,, 1 cos2001cos150, 2 50100 200300, 15050, 1 cos200, 50 200300, 5050, 1 cos2001cos50, 250 100 200300,50150. xyt vt xy W xy vt x W xy vt xy W xy (26) For these displacements, the bed rises during 1 0tt to a maximum displacement 0 such that the volume of  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 535 (a) (b) Figure 2. Normalized bed deformation represented by a rapid curvilinear down and uplift faulting at the end of stage one (150 tv )(a) Side view along the axis of symmetry at 0y (b) Three- dimensional view. (a) (b) Figure 3. Normalized Bed deformation model represented by the accumulation and deplet ion zones at the end of stage two (200 tv ) (a) Side view along the axis of symmetry at 0y (b) Three-dimensional view. soil in the uplift increases linear with time and vise verse in the down faulting. For 1 tt the soil further propagates unilaterally in the positive x-direction with velocity v till it reaches the characteristic length L = 150 km at 200tt v . 2) Second Stage: Curvilinear down and Uphill Slip-Fault (Slump and the Slide) down1down 2down 3down ,,,, ,, ,, x ytxyt xyt xyt (27) where, 1down 0 0 1 0 1 11 ,, 1 cos1cos150, 450 100 500, 15050, 1 cos150, 2 100 0, 15050, 1 cos1 cos150, 450 100 50, 15050. xyt xy xy y xttv y xttv y ttv xttvy 2down 0 0 1 0 1 11 ,, 1cos , 250 500, 5050, , 0, 5050, 1cos , 250 50, 5050. xyt x xy xttv y xttv ttv xttvy 3down 0 0 1 0 1 11 ,, 1 cos1 cos50, 4 50100 500,50150, 1 cos50, 2100 0,50150, 1 cos1 cos50, 450 100 50, 50150. xyt xy xy y xttvy xttvy ttv xttvy up1up 2up3up ,,,, ,, ,, x ytxytxyt xyt (28)  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 536 By referring to Figure 3, 1up ,, x yt , 2up ,, x yt and 3up ,, x yt can be expressed in the same manner as 1down ,, x yt 2down ,, x yt and 3down ,, x yt . The kinematic realistic tsunami source model shown in Figure 3 is initiated by a rapid curvilinear down and uplift faulting (First stage) which then spreads unilate- rally with constant velocity v causing a depletion and accumulation zones. The final down lift of the depression zone and final uplift of the accumulation zone are as- sumed to have the same amplitude 0 . We assume the spreading velocity v of the slump and the slide deforma- tion in Figure 3 the same as the tsunami wave velocity t vgh as the largest amplification of the tsunami amplitude occurs when t vv due to wave focusing [6,36]. The slide and the slump are assumed to have con- stant width W. The spreading is unilateral in the x-direction as shown in Figure 3. The vertical displacement, 0 , is negative (downwards) in zones of depletion, and positive (up- wards) in zones of accumulation. All cases are characte- rized by sliding motion in one direction, without loss of generality coinciding with the x-axis, and tsunami prop- agating in the x-y plane. Figure 4 shows vertical cross-sections (through y = 0) of the mathematical models of the stationary submarine slump and the moving slide and their schematic repre- sentation of the physical process that we considered in this study, as those evolve for time tt . The block slide starts moving in the positive x-direction at time tt and stops moving at distance 150L km while the downhill slide becomes stationary. We discuss the tsunami generation for two cases of the movement of the block slide. First, the limiting case in which the block slide moves with constant velocity v and stops after dis- tance L with infinite deceleration (sudden stop) at time min ttLv . Second, the general case in which the block slide moves in time 2 tt . With constant veloci- ty and then with constant deceleration such that it stops softly after traveling the same distance L in time 3 t which depends on the deceleration and the choice of time 2 t. The variation of the ‘‘block slide’’ we consi- dered could be used to represent the motion of the col- lapsed blocks at the Blake Escarpment, east of Florida. (see Figure 7 in Dillon et al. [37]) and the block slide at the base of Middle Canyon along the Beringian Margin in Alaska (see Figure 8 in Carlson et al. [38]) and the Sur submarine landslide originated on the continental slope west of Point Sur, central California(see Figure 1 in Gutmacher and Normark [39]). So, the evidence of a huge historical tsunami needs for investigating the possi- bility of future tsunami generating by submarine land- slides. The velocity vt in this case can be defined as 2 22 3 vttt vt vttt tt (29) where 0.14 t vv km/sec and is the deceleration of the moving block slide. We need to determine the time 3 t that the slide takes to reach the final distance L and (a) v(t) Displaced L' Landslide scar Landslide scar (b) Displaced v(t) L' L L Landslide scar (c) Figure 4. A schematic representation of a landslide (bottom) travelling a significant distance L downhill creating a “scar” and a moving uphill displaced block slide stopping at the characteristic length L. (a) Case 1: Mathematical model of the stationary slump and the moving submarine slide; (b) Case 2: Physical process of the displaced block moving with a variable slide velocity vt; (c) Case 3: Schematic repre- sentation of the used model. 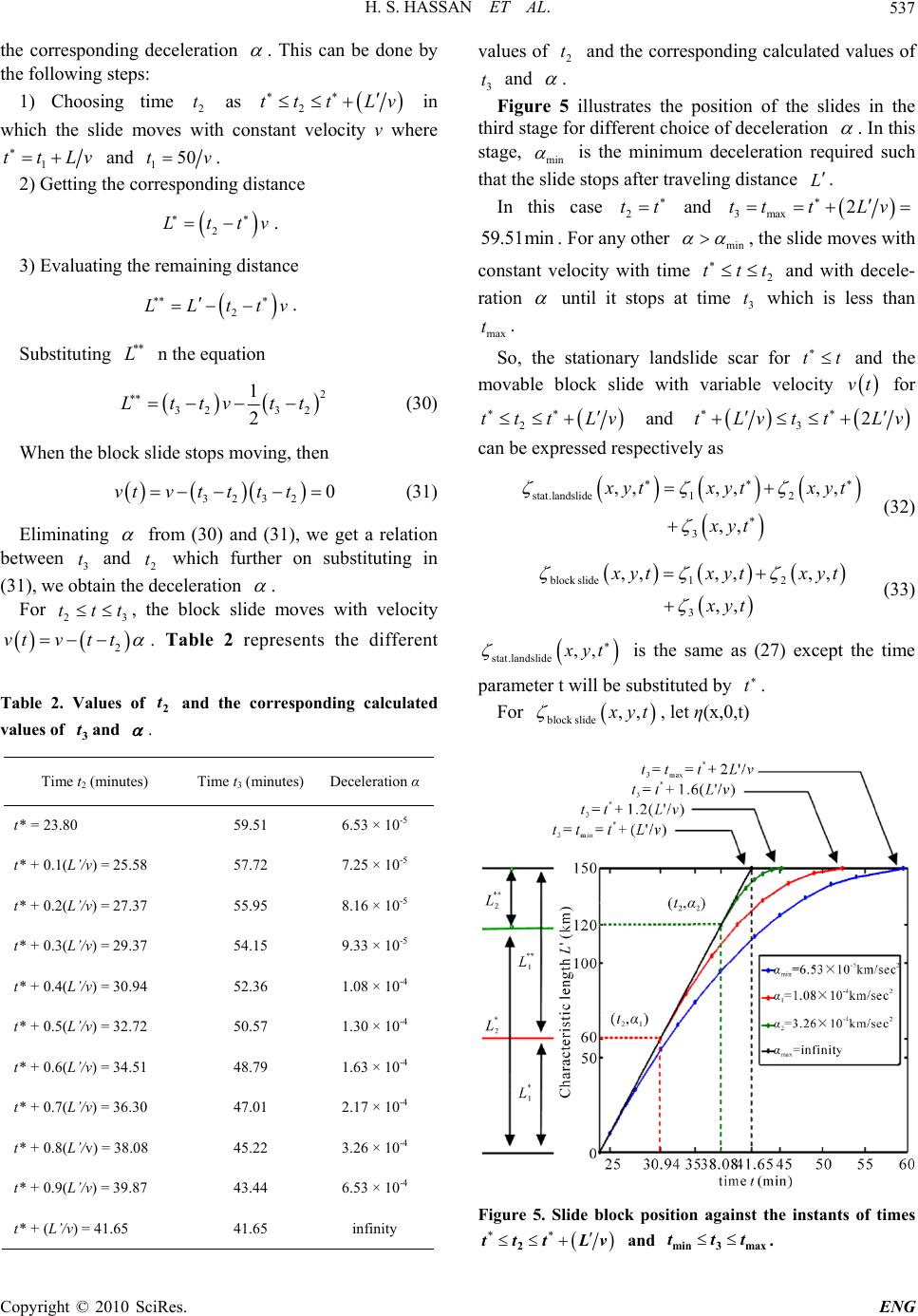 H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 537 the corresponding deceleration . This can be done by the following steps: 1) Choosing time 2 t as 2 ttt Lv in which the slide moves with constant velocity v where 1 ttLv and 150tv. 2) Getting the corresponding distance 2 L ttv . 3) Evaluating the remaining distance 2 L Lttv . Substituting L n the equation 2 32 32 1 2 L ttv tt (30) When the block slide stops moving, then 3232 0vtv t t t t (31) Eliminating from (30) and (31), we get a relation between 3 t and 2 t which further on substituting in (31), we obtain the deceleration . For 23 ttt , the block slide moves with velocity 2 vtvt t . Table 2 represents the different Table 2. Values of 2 t and the corresponding calculated values of 3 tand . Time t2 (minutes) Time t3 (minutes) Deceleration α t* = 23.80 59.51 6.53 × 10-5 t* + 0.1(L’/v) = 25.58 57.72 7.25 × 10-5 t* + 0.2(L’/v) = 27.37 55.95 8.16 × 10-5 t* + 0.3(L’/v) = 29.37 54.15 9.33 × 10-5 t* + 0.4(L’/v) = 30.94 52.36 1.08 × 10-4 t* + 0.5(L’/v) = 32.72 50.57 1.30 × 10-4 t* + 0.6(L’/v) = 34.51 48.79 1.63 × 10-4 t* + 0.7(L’/v) = 36.30 47.01 2.17 × 10-4 t* + 0.8(L’/v) = 38.08 45.22 3.26 × 10-4 t* + 0.9(L’/v) = 39.87 43.44 6.53 × 10-4 t* + (L’/v) = 41.65 41.65 infinity values of 2 t and the corresponding calculated values of 3 t and . Figure 5 illustrates the position of the slides in the third stage for different choice of deceleration . In this stage, min is the minimum deceleration required such that the slide stops after traveling distance L . In this case 2 tt and 3max 2tt tLv 59.51min . For any other min , the slide moves with constant velocity with time 2 ttt and with decele- ration until it stops at time 3 t which is less than max t. So, the stationary landslide scar for tt and the movable block slide with variable velocity vt for 2 ttt Lv and 32tLvtt Lv can be expressed respectively as stat.landslide1 2 3 ,, ,, ,, ,, x yt xyt xyt xyt (32) block slide12 3 ,, ,, ,, ,, x yt xyt xyt xyt (33) stat.landslide ,, x yt is the same as (27) except the time parameter t will be substituted by t. For block slide,, x yt , let η(x,0,t) Figure 5. Slide block position against the instants of times 2 ttt Lv and min3 max ttt .  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 538 2 2 223 for 1for 2 ttvtt t S ttvtttt t be the distance the slide moves during stage three, hence 1 0 0 0 ,, 1 cos2001 cos150, 450 100 200250,15050, 1cos150 , 2100 250250, 15050, 1 cos2501 cos150, 450 100 250300, 150 xyt xS y Sx Sy y Sx SLy xSL y SLx SLy 50. 2 0 0 0 ,, 1 cos200, 250 200250, 5050, , 250250, 5050, 1 cos250, 250 250300, 5050. xyt xS Sx Sy Sx Sy xSL SLx SLy 3 0 0 0 ,, 1 cos2001 cos150, 450 100 200250, 50150, 1 cos150, 2100 250250, 50150, 1 cos2501 cos150, 450 100 250300, 50150. xyt xS y SxS y y SxSL y xSL y SLxSL y Laplace and Fourier transforms can now be applied to the bed motion described by (25)-(28) and (32)-(33). First, beginning with the down and uplift faulting (25) and (26) for 1 0tt where 1 50 tv , and £ 12 ,,, , x ytk ks 12 0,, ikxk yst edxdyxytedt (34) The limits of the above integration are apparent from (25)-(26). Substituting the results of the integration (34) for down and up into (24). The free surface elevation 12 ,,kkt can be evaluated by using the inverse Lap- lace transforms of 12 ,,kks . From which, 11 11 11 11 2 200 300 300 200 1 2 1 1 0 12 2 50 50 50 50 1 2 1 1 150 50 1 sin ,, cosh 2 150 50 1 ik ik ik ik ik ik ik ik ee ike e ik k v t kkt kh W ee ike e ik k 22 22 22 22 2 150 50 2 50 150 2 2 2 2 2 2 50 150 150 50 2 2 2 2 4sin50 1100 100 1 1 100 100 1 ik ik iki k ikik ik ik k ee ikee ik k k ee ike e ik k (35)  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 539 In case of 1 tt, 12 ,,kkt will have the same ex- pression except in the convolution step, the integral be- comes 1 0 sin sin cos ttt t d instead of 0 sin cos tt d . Finally, ,, x yt is evaluated using the double in- verse Fourier transform of 12 ,,kkt 21 1212 2 1 ,,, , 2 ikyik x x yteekkt dkdk (36) This inversion is computed by using the FFT. The in- verse FFT is a fast algorithm for efficient implementa- tion of the Inverse Discrete Fourier Transform (IDFT) given by 22 11 00 1 ,,, 0,1, ,1,0,1,1, MN ipmiqn MN pq fmnFpqe e MN pMqN where , f mn is the resulting function of the two spa- tial variables m and n, corresponding to x and y, from the frequency domain function , F pq with frequency variables p and q, corresponding to k1 and k2. This inver- sion is done efficiently by using the Matlab FFT algo- rithm. Using the same steps, 12 ,,kkt is evaluated by ap- plying the Laplace and Fourier transforms to the bed motion described by (27) and (28), then substituting into (24) and then inverting 12 ,,kk s using the inverse Laplace transform to obtain 12 ,,kkt . This is verified for 1 ttt where 200 tv as 1 2down12up1 2 ,,,, ,,kktkkt kkt (37) where, down 121down 122down 12 3down1 2 ,,,,,, ,, kktkkt kkt kkt then and up1 21up1 22up1 2 3up1 2 ,,,,,, ,, kktkkt kkt kkt then 22 22 22 2 150 50 50 150 0 2 2 2 2 2 0 down1 2 2 50 150 0 2 2 1 100 4cosh 100 1 sin 50 ,, cosh 1 4cosh 100 1 ik ik ikik iki k ee ike e kh ikk k kkt khk ee kh ikk 22 11 1 2 150 50 2 2 2 50 50 50 11 2 1 1 11 1 2 2 1 100 150 1cos 50 1 2sin ik ik ik ik ik ike e ee iket t ik k vttikv tt kv 11 1111 11 11 1 2 50 50 1 1 2 1 1 150 1cos 50 1 ikt tv ikt tvikt tv ikt tvikt tv ik ve ee ikeet t ik k  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 540 22 22 22 2 150 50 50 150 0 2 2 2 2 2 0 up1 2 2 50 150 0 2 2 2 1100 4cosh 100 1 sin 50 ,, cosh 1 4cosh 100 1 ik ik iki k iki k ee ike e kh ikk k kkt kh k ee kh ikk 22 11 11 1 2 150 50 2 2 200 250 250 200 11 2 1 1 250 2 2 1 100 150cos 50 1 2 ik ik ik ik ik ik ik ike e ee ikeet t ik k ve kv 11 11 11 11 11 11 11 2 250 300 300 250 1 2 1 1 1 sin cos 150 50 1 cos ikt tv ikttvikt tv ikt tvikt tv tt ikvttikve ee ik ee ik k tt Substituting down1 2 ,,kkt and up1 2 ,,kkt into (37) gives 12 ,,kkt for 1 ttt . For the case tt , 12 ,,kkt will have the same expression as (37) except for the term resulting from the convolution theo- rem, i.e. 11 1 1 2 2 1 111 11 1 1 cos sin cos sin cos tikt tv tt t ik vt ed kv tt ikvtt e tt tikvtt t , instead of 11 1 11 2 2 1 11 11 1 cos sin cos tik t tv tt ik vttv ed kv tt ikvtt ikve . So, ,, x yt is computed using inverse FFT of 12 ,,kkt . Finally, block slide12 ,,kkt is evaluated by applying the Laplace and Fourier transforms to the block slide motion described by (33), then substituting into (24) and then inverting block slide12 ,,kk s using the inverse Laplace transform to obtain block slide12 ,,kkt . This is verified for 2 tttLv and 3 tLvt 2tLv . Then, block slide12112212 312 ,, ,, ,, ,, kkt kkt kkt kkt (38) Then, Finally, ,, x yt is computed using inverse FFT of 12 ,,kkt . We investigated mathematically the water wave mo- tion in the near and far-field by considering a kinematic mechanism of the sea floor faulting represented in se- quence by a down and uplift motion with time followed by unilateral spreading in x-direction, both with constant velocity v, then a deceleration movement of a block slide in the direction of propagation. Clearly, from the mathematical derivation done above, ,, x yt de- pends continuously on the source ,, x yt . Hence, from the mathematical point of view, this problem is said to be well-posed for modeling the physical processes of the tsunami wave.  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 541 22 22 22 2 150k 50k 50k 150k 0 2 2 2 2 2 00 block slide12 2 50k 150k 2 2 1100 4cosh 100 1 sin 50 ,, cosh 4cosh 1 100 1 ii ii ii ee ike e kh ikk k kkt kh kkh ee ik k 22 11 11 2 150k50k 2 2 2 (200 )(250 ) (250 )(200 ) 1 2 1 1 100 150 50 1 cos ii iSk iSk iSk iSk ike e ee ikee ik k 1 1 11 11 3 (250 ) 31 3313 2 2 1 2 (250 )(300) (300 )(250 ) 1 2 1 1 2sin cossincos 150 50 1 cos iSk ik L ikS LikS L ikS LikS L wt t ve wwtikvwtewwt tikvwt t wkv ee ik ee ik k 3 wt t 3. Results and Discussion We are interested in illustrating the nature of the tsunami build up and propagation during and after the movement process of a variable curvilinear block shape sliding. In this section three cases are studied. We first examine the generation process of tsunami waveform resulting from the unilateral spreading of the down and uplift slip fault- ing in the direction of propagation with constant velocity v. We assume the spreading velocity of the ocean floor up and down lift to be equal to the tsunami wave velocity 0.14 t vghkm/sec as it has been verified in [6,36] that the largest wave amplitude occurs when t vv due to wave focusing. 3.1. Tsunami Generation caused by Submarine Slump and Slide-Evolution in Time We assume the waveform initiated by a rapid movement of the bed deformation of the down and uplift source shown in Figure 2. Figure 6 shows the tsunami gener- ated waveforms during the second stage at time evolu- tion 0.4,0.6,0.8,.ttttt at constant water depth h = 2 km. It is seen how the amplitude of the wave builds up progressively as t increases where more water is lifted below the leading wave depending on its variation in time and the space in the source area. The wave will be focusing and the amplification may occur above the spreading edge of the slip. This amplification occurs above the source progressively as the source evolves by adding uplifted fluid to the fluid displaced previously by uplifts of preceding source segments. This explains why the amplification is larger for wider area of uplift source than for small source area. It can be seen that the tsunami waveform 0 has two large peaks of comparable amplitudes, one in the front of the block due to sliding of the block forward, and the other one behind the block due to spreading of the depletion zone. These results are in good agreement with the aspect of the tsunami wave- forms generated by a slowly spreading slump and slide of the ocean bottom presented by Todorovsk et al. [9] and Hayir [28] who considered very simple kinematic source models represented by sliding Heaviside step 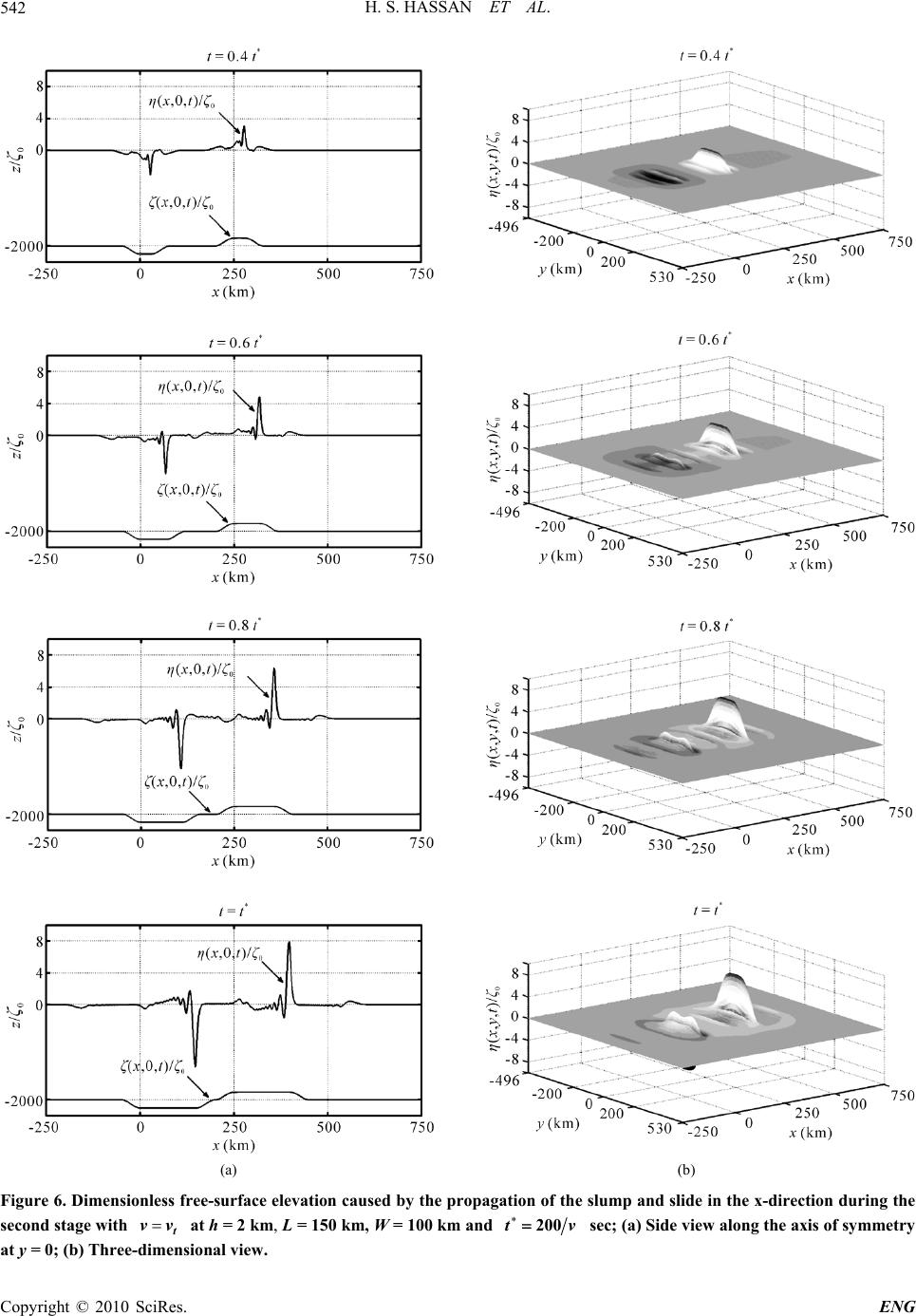 H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 542 (a) (b) Figure 6. Dimensionless free-surface elevation caused by the propagation of the slump and slide in the x-direction during the second stage with t vv at h = 2 km, L = 150 km, W = 100 km and 200tv sec; (a) Side view along the axis of symmetry at y = 0; (b) Three-dimensional view. 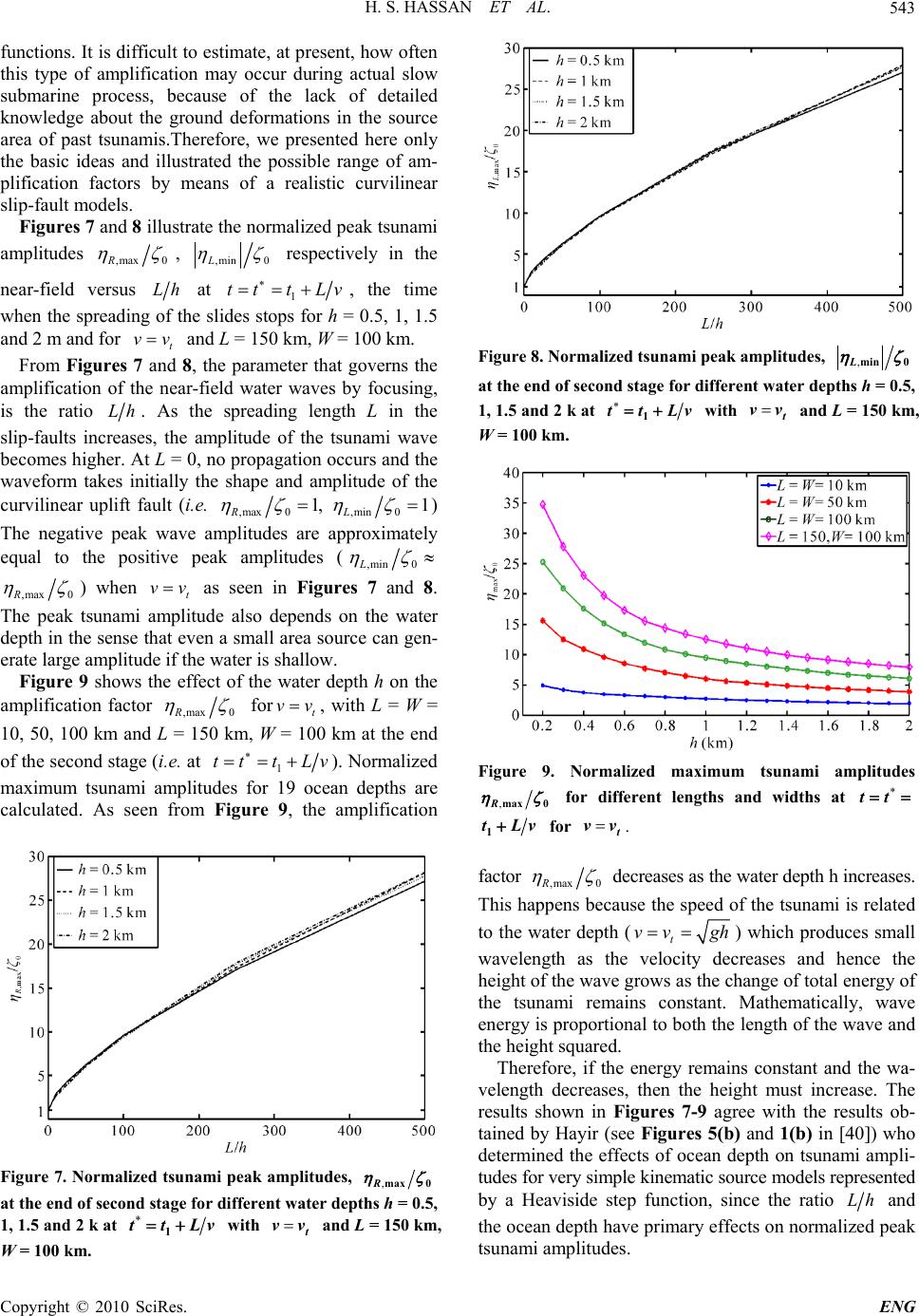 H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 543 functions. It is difficult to estimate, at present, how often this type of amplification may occur during actual slow submarine process, because of the lack of detailed knowledge about the ground deformations in the source area of past tsunamis.Therefore, we presented here only the basic ideas and illustrated the possible range of am- plification factors by means of a realistic curvilinear slip-fault models. Figures 7 and 8 illustrate the normalized peak tsunami amplitudes ,max0R , ,min0L respectively in the near-field versus L h at 1 ttt Lv , the time when the spreading of the slides stops for h = 0.5, 1, 1.5 and 2 m and for t vv and L = 150 km, W = 100 km. From Figures 7 and 8, the parameter that governs the amplification of the near-field water waves by focusing, is the ratio L h. As the spreading length L in the slip-faults increases, the amplitude of the tsunami wave becomes higher. At L = 0, no propagation occurs and the waveform takes initially the shape and amplitude of the curvilinear uplift fault (i.e. ,max0,min 0 1, 1 RL ) The negative peak wave amplitudes are approximately equal to the positive peak amplitudes (,min 0L ,max0R ) when t vv as seen in Figures 7 and 8. The peak tsunami amplitude also depends on the water depth in the sense that even a small area source can gen- erate large amplitude if the water is shallow. Figure 9 shows the effect of the water depth h on the amplification factor ,max 0R fort vv, with L = W = 10, 50, 100 km and L = 150 km, W = 100 km at the end of the second stage (i.e. at 1 ttt Lv ). Normalized maximum tsunami amplitudes for 19 ocean depths are calculated. As seen from Figure 9, the amplification Figure 7. Normalized tsunami peak amplitudes, ,max0R at the end of second stage for different water depths h = 0.5, 1, 1.5 and 2 k at 1 ttLv with t vv and L = 150 km, W = 100 km. Figure 8. Normalized tsunami peak amplitudes, ,min 0L at the end of second stage for different water depths h = 0.5, 1, 1.5 and 2 k at 1 ttLv with t vv and L = 150 km, W = 100 km. Figure 9. Normalized maximum tsunami amplitudes ,max 0R for different lengths and widths at tt 1 tLv for t vv . factor ,max0R decreases as the water depth h increases. This happens because the speed of the tsunami is related to the water depth (t vv gh ) which produces small wavelength as the velocity decreases and hence the height of the wave grows as the change of total energy of the tsunami remains constant. Mathematically, wave energy is proportional to both the length of the wave and the height squared. Therefore, if the energy remains constant and the wa- velength decreases, then the height must increase. The results shown in Figures 7-9 agree with the results ob- tained by Hayir (see Figures 5(b) and 1(b) in [40]) who determined the effects of ocean depth on tsunami ampli- tudes for very simple kinematic source models represented by a Heaviside step function, since the ratio L h and the ocean depth have primary effects on normalized peak tsunami amplitudes. 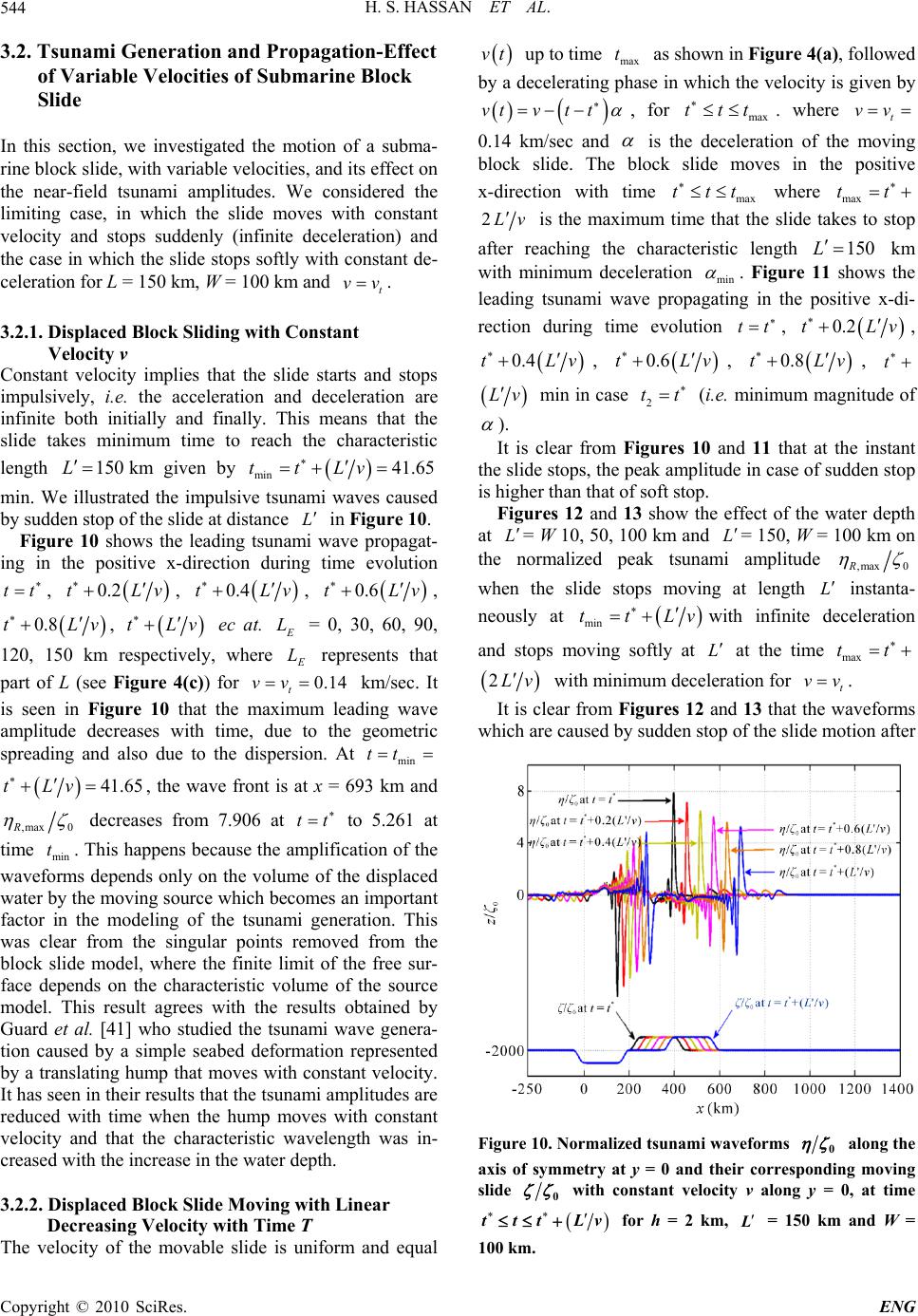 H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 544 3.2. Tsunami Generation and Propagation-Effect of Variable Velocities of Submarine Block Slide In this section, we investigated the motion of a subma- rine block slide, with variable velocities, and its effect on the near-field tsunami amplitudes. We considered the limiting case, in which the slide moves with constant velocity and stops suddenly (infinite deceleration) and the case in which the slide stops softly with constant de- celeration for L = 150 km, W = 100 km and t vv. 3.2.1. Displaced Block Sliding with Constant Velocity v Constant velocity implies that the slide starts and stops impulsively, i.e. the acceleration and deceleration are infinite both initially and finally. This means that the slide takes minimum time to reach the characteristic length 150Lkm given by min 41.65ttLv min. We illustrated the impulsive tsunami waves caused by sudden stop of the slide at distance L in Figure 10. Figure 10 shows the leading tsunami wave propagat- ing in the positive x-direction during time evolution tt , 0.2tLv , 0.4tLv , 0.6tLv , 0.8tLv , tLv ec at. E L = 0, 30, 60, 90, 120, 150 km respectively, where E L represents that part of L (see Figure 4(c)) for 0.14 t vv km/sec. It is seen in Figure 10 that the maximum leading wave amplitude decreases with time, due to the geometric spreading and also due to the dispersion. At min tt 41.65tLv , the wave front is at x = 693 km and ,max0R decreases from 7.906 at tt to 5.261 at time mi n t. This happens because the amplification of the waveforms depends only on the volume of the displaced water by the moving source which becomes an important factor in the modeling of the tsunami generation. This was clear from the singular points removed from the block slide model, where the finite limit of the free sur- face depends on the characteristic volume of the source model. This result agrees with the results obtained by Guard et al. [41] who studied the tsunami wave genera- tion caused by a simple seabed deformation represented by a translating hump that moves with constant velocity. It has seen in their results that the tsunami amplitudes are reduced with time when the hump moves with constant velocity and that the characteristic wavelength was in- creased with the increase in the water depth. 3.2.2. Displaced Block Slide Moving with Linear Decreasing Velocity with Time T The velocity of the movable slide is uniform and equal vt up to time max t as shown in Figure 4(a), followed by a decelerating phase in which the velocity is given by vtvt t , for max ttt . where t vv 0.14 km/sec and is the deceleration of the moving block slide. The block slide moves in the positive x-direction with time max ttt where max tt 2 L v is the maximum time that the slide takes to stop after reaching the characteristic length 150L km with minimum deceleration min . Figure 11 shows the leading tsunami wave propagating in the positive x-di- rection during time evolution tt , 0.2tLv , 0.4tLv , 0.6tLv , 0.8tLv , t Lv min in case 2 tt (i.e. minimum magnitude of ). It is clear from Figures 10 and 11 that at the instant the slide stops, the peak amplitude in case of sudden stop is higher than that of soft stop. Figures 12 and 13 show the effect of the water depth at L = W 10, 50, 100 km and L = 150, W = 100 km on the normalized peak tsunami amplitude ,max 0R when the slide stops moving at length L instanta- neously at min ttLv with infinite deceleration and stops moving softly at L at the time max tt 2Lv with minimum deceleration for t vv. It is clear from Figures 12 and 13 that the waveforms which are caused by sudden stop of the slide motion after Figure 10. Normalized tsunami waveforms 0 along the axis of symmetry at y = 0 and their corresponding moving slide 0 with constant velocity v along y = 0, at time tttLv for h = 2 km, L = 150 km and W = 100 km.  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 545 Figure 11. Normalized tsunami waveforms 0 and their corresponding moving slide 0 with variable velocity vt along y = 0, at time 2ttt Lv at h = 2 km, L = 150 km and W = 100 km. Figure 12. Normalized maximum tsunami amplitudes ,max 0 R when the slide stops suddenly at time min t tLv with different slide lengths L and widths W and for t vv. they reach the characteristic length L at time min t tLv have higher amplitude than stopping of the slide with slow motion at time max 2tt Lv . This agrees with the mathematical relation between the wave- length and the wave height where the wave energy is proportional to both the length of the wave and the height squared. 3.2.3. Displaced Block Slide Moving with Constant Velocity v Followed by Variable Velocity vt In this section, we studied the generation of the tsunami waveforms when the block slide moves a significant dis- tance with constant velocity t vv then continues moving Figure 13. Normalized maximum tsunami amplitudes ,max 0 R when the slide stops softly at time max t 2tLv with different slide lengths L and widths W and for t vv . with variable velocity vt with constant deceleration until it stops at the characteristic length L = 150 km. Figure 14 shows the tsunami waveforms at the times calculated in Table 2 when the slide reaches the charac- teristic length L = 150 km. In Figure 14, the blue waveform indicates the shape of the wave at the time 3min 41.65ttt Lv min in the limiting case when the slide stops moving suddenly. The green waveform indicates the wave in the other limiting case at the time 3max 2tt tLv when the slide stops moving with minimum deceleration at the distance L . In between the two limiting cases, the slide begins moving with constant velocity a significant distance followed by decelerating movement until it stops at the characteristic length L = 150 km at the time min3 max ttt , see Table 2. It is seen how the peak amplitudes of the leading waves decreases gradually from 5.261 to 3.894. In order to compare the shape and maximum height of tsunami wave at certain time for different deceleration , we choose the time max tt . For the limiting case min , there is no free propagation, while for the other limiting case “the sudden stop”, there is maximum free propagation between time min t and max t. For the cases between the two limiting cases, the propagation time is p ropmax 3 ttt . Figure 15 shows the shape of the tsunami propagation waveform at max 259.51ttLv min (curves in black) for different deceleration and time 3 t (time at which the slide stops). As the wave propagates, the wave height decreases and the slope of the wave front  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 546 Figure 14. Normalized tsunami waveforms 0 along y = 0 at 3 tt calculated in Table 2 with L = 150 km. becomes smaller, causing a train of small wave forms behind the main wave. The maximum wave amplitude decreases with time, due to the geometric spreading and also due to the dispersion. Figure 16 represents the normalized peak tsunami amplitudes 0 min and max 0 of the leading propagating wave in the far-field at the time max tt for the different deceleration and time 3 t (time at which the slide stops) chosen in Figure 15. Figure 15. Normalized tsunami propagation waveforms 0 along the axis of symmetry at y = 0 at time max t = 59.51 min and at time 3 t for different deceleration .  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 547 Figure 16. The normalized peak tsunami amplitudes 0 min and max 0 at time max tt for the different deceleration and time 3 t. It can be seen in Figure 16 that the absolute minimum peak amplitudes of the leading propagated waves at time max 2ttLv , after the block slide stops moving with different deceleration and time 3 t, decrease gradually, while the maximum peak amplitudes increase progressively. 4. Conclusions In this paper, we presented a review of the main physical characteristics of the tsunami generation caused by rea- listic curvilinear submarine slumps and slides in the near-field. It is seen that the tsunami waveform has two large peaks of comparable amplitudes, one in the front of the block due to forward sliding of the block, and the other one behind the block due to spreading of the deple- tion zone. The negative peak wave amplitudes are ap- proximately equal to the positive peak amplitudes. These results agree with the qualitative behaviour of the tsuna- mi waveforms generated by a slowly spreading slump and slide of the ocean bottom presented by Todorovsk et al. [9] and Hayir [28] who considered very simple kine- matic source models represented by sliding Heaviside step functions. We studied the effect of variable veloci- ties of submarine block slide on the tsunami generation in the limiting cases, in which the slide moves with con- stant velocity and stops suddenly (with infinite decelera- tion) and the case in which the slide stops softly at the same place with minimum deceleration. It is seen that the leading tsunami amplitudes are reduced in both cases due to the geometric spreading and also due to the dispersion. We observed that the peak tsunami amplitudes increase with the decrease in the sliding source area and the water depth. We also investigated the more realistic case in which the block slide moves a significant distance with constant velocity v then continue moving with time de- pendence velocity vt and different constant decelera- tion until it stops at the characteristic length. It is seen how the peak amplitudes of the leading waves decrease gradually with time between the two limiting cases. In this case we demonstrated also the shape of tsunami propagated wave at certain time max t (time at which the slide stops with minimum deceleration). The results show that the wave height decreases due to dispersion and the slope of the front of the wave becomes smaller, causing a train of small wave forms behind the main wave. It can be observed that just a slight variation in the maximum and the minimum tsunami propagated ampli- tudes after the block slide stops moving with different deceleration and time 3 t, see Figure 16. The pre- sented analysis suggests that some abnormally large tsu- namis could be explained in part by variable speeds of submarine landslides. Our results should help to enable quantitative tsunami forecasts and warnings based on recoverable seismic data and to increase the possibilities for the use of tsunami data to study earthquakes, particu- larly historical events for which adequate seismic data do not exist. 5. Acknowledgments The authors would like to express their gratitude to Pro- fessor Mina B. Abd-el-Malek, head of the Department of Engineering Mathematics and Physics, Faculty of Engi- neering, Alexandria University, Egypt for his valuable suggestions and discussions which led to many im- provements of the manuscript. The authors would like to thank the reviewer for his/her valuable comments, which improved the paper. 6. References [1] M. S. Abou-Dina and F. M. Hassan, “Generation and Propagation of Nonlinear Tsunamis in Shallow Water by a Moving Topography,” Applied Mathematics and Com- putation, Vol. 177, No. 2, 2006, pp. 785-806. [2] F. M. Hassan, “Boundary Integral Method Applied to the Propagation of Non-linear Gravity Waves Generated by a Moving Bottom,” Applied MathematicalModelling, Vol. 33, No. 1, 2009, pp. 451-466. [3] N. Zahibo, E. Pelinovsky, T. Talipova , A. Kozelkov and A. Kurkin, “Analytical and Numerical Study of Nonlinear Effects at Tsunami Modeling,” Applied Mathematics and Computation, Vol. 174, No. 2, 2006, pp. 795-809. [4] K. Das, S. Green, D. Basu, R. Janetzke and J. Stamatakos, “Effect of Slide Deformation and Geometry on Waves Generated by Submarine Landslides: A Numerical Inves- tigation,” Offshore Technology Conference, Texas, USA, May 2009, pp. 1-12. [5] Ben-Menahem and M. Rosenman, “Amplitude Patterns  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 548 of Tsunami Waves from Submarine Earthquakes,” Jour- nal of Geophysical Research, Vol. 77, No. 17, 1972, pp. 3097-3128. [6] M. I. Todorovska and M. D. Trifunac, “Generation of Tsunamis by a Slowly Spreading Uplift of the Sea Floor,” Soil Dynamics and Earthquake Engineering, Vol. 21, No. 2, 2001, pp. 151-167. [7] M. D. Trifunac and M. I. Todorovska, “A Note on Dif- ferences in Tsunami Source Parameters for Submarine Slides and Earthquakes,” Soil Dynamics and Earthquake Engineering, Vol. 22, No. 2, 2002, pp.143-155. [8] M. D. Trifunac, A. Hayir and M. I. Todorovska, “A Note on Tsunami Caused by Submarine Slides and Slumps Spreading in One Dimension with Nonuniform Dis- placement Amplitudes,” Soil Dynamics and Earthquake Engineering, Vol. 23, No. 3, 2003, pp. 223-234. [9] M. I. Todorovsk, M. D. Trifunac and A. Hayir, “A Note on Tsunami Amplitudes above Submarine Slides and Slumps,” Soil Dynamics and Earthquake Engineering, Vol. 22, No. 2, 2002, pp. 129-141. [10] M. D. Trifunaca, A. Hayira and M. I. Todorovska, “Was Grand Banks Event of 1929 a Slump Spreading in Two Directions,” Soil Dynamics and Earthquake Engineering, Vol. 22, No. 5, 2002, pp. 349-360. [11] Hayir, “The Near-Field Tsunami Amplitudes Caused by Submarine Landslides and Slumps Spreading in Two Prthogonal Directions,” Ocean Engineering, Vol. 33, No. 5-6, 2006, pp. 654-664. [12] S. A. Beisel, L. B. Chubarov, Z. I. Fedotova and G. S. Khakimzyanov, “On the Approaches to a Numerical Modeling of Landslide Mechanism of Tsunami Wave Generation,” Communications in Applied Analysis, Vol. 11, No. 1, 2007, pp. 121-135. [13] P. Lynett and L.-F. Liu Philip, “A Numerical Study of Submarine-Landslide-Generated Waves and Run-Up,” Proceeding of the Royal Society A, Vol. 458, No. 2028, 2002, pp. 2885-2910. [14] L. Jiang and P. H. Le Blond, “The Coupling of a Subma- rine Slide and the Surface Waves Which it Generates,” Journal of Geophysical Research, Vol. 97, No. C8, 1992, pp. 12731-12744. [15] S. Rzadkiewicz, C. Mariotti and P. Heinrich, “Numerical Simulation of Submarine Landslides and Their Hydraulic Effects,” Journal of Waterway, Port, Coastal, and Ocean Engineering, Vol. 123, No. 4, 1997, pp. 149-157. [16] S. T. Grilli and P. Watts, “Modeling of Waves Generated by a Moving Dubmerged Body, Applications to Under- water Landslides,” Journal of Engineering Analysis with Boundary Elements, Vol. 23, No. 8, pp. 1999, 645-656. [17] P. Watts, S. T. Grilli, D. R. Tappin and G. J. Fryer, “Tsunami Generation by Dubmarine Mass Failure. II: Predictive Equations and Case Studies,” Journal of Wa- terway, Port, Coastal, and Ocean Engineering, Vol. 131, No. 6, 2005, pp. 298-310. [18] B. Ataie-Ashtiani and G. Shobeyri, “Numerical simula- tion of landslide impulsive waves by incompressible smoothed particle hydrodynamics,” International Journal for Numerical Methods in Fluids, Vol. 56, No. 2, 2008, pp. 209-232. [19] R. Agustinus, “Numerical Study of Tsunami Waves with Sloping Bottom and Nonlinear Friction,” Journal of Ma- thematics and Statistics, Vol. 4, No. 1, 2008, pp. 41-45. [20] Najafi-Jilani and B. Ataie-Ashtiani, “Estimation of Near-Field Characteristics of Tsunami Generation by Submarine Landslide,” Ocean Engineering, Vol. 35, No. 5-6, 2008, pp. 545- 557. [21] P. Watts, “Wave Maker Curves for Tsunamis Generated by Underwater Landslides,” Journal of Waterway, Port, Coastal, and Ocean Engineering, Vol. 124, No. 3, 1998, pp. 127-137. [22] P. Watts and S. T. Grilli, “Underwater Landslide Shape, Motion, Deformation, and Tsunami Generation,” Pro- ceedings of The Thirteenth Internation Offshore and Po- lar Engineering Conference, Honolulu, Hawaii, USA, May 25-30, 2003, pp. 364-371. [23] H. M. Fritz, W. H. Hager and H. E. Minor, “Near Field Characteristics of Landslide Generated Impulse Waves,” Journal of Waterway, Port, Coastal, and Ocean Engi- neering, Vol. 130, No. 6, 2004, pp. 287-302. [24] B. Ataie-Ashtiani and A. Najafi-Jilani, “Higher-order Boussinesq-Type Model with Moving Bottom Boundary: Applications to Submarine Landslide Tsunami Waves,” International Journal for Numerical Methods in Fluids, Vol. 53, No. 6 2007, pp. 1019-1048. [25] E. François and T. G. Stephan, “Experimental Study of Tsunami Generation by Three-Dimensional Rigid Un- derwater Landslides,” Journal of Waterway, Port, Coast- al, and Ocean Engineering, Vol. 133, No. 6, 2007, pp. 442-454. [26] S. N. Ward, “Landslide Tsunami,” Journal of Geophysi- cal Research, Vol. 106, No. B6, 2001, pp. 201-215. [27] M. D. Trifunac, A. Hayir and M. I. Todorovska, “A Note on the Effects of Nonuniform Spreading Velocity of Submarine Slumps and Slides on the Near-Field Tsunami Amplitudes,” Soil Dynamics and Earthquake Engineer- ing, Vol. 22, No. 3, 2002, pp. 167-180. [28] Hayir, “The Effects of Variable Speeds of a Submarine Block Slide on Near-field Tsunami Amplitudes,” Ocean Engineering, Vol. 30, No. 18, 2003, pp. 2329-2342. [29] V. V. Titov and F. I. Gonzalez, “Implementation and Testing of the Method of Splitting Tsunami (MOST) Model,” NOAA/Pacific Marine Environmental Labora- tory, U.S., 1997. [30] A.Yu. Bezhaev, M.M. Lavrentiev and An.G. Marchuk, V. V. Titov, “Determination of Tsunami Sources Using Deep Ocean Wave Records,” Bull. Nov. Comp. Center Math. Model in Geoph., Vol. 11, No. 2006, pp. 53-63. [31] L. Jordanovski and M. I. Todorovska, “Inverse Studies of the Earthquake Source Mechanism from Near-Field Strong Motion Records,” Journal of Indian Society of Earthquake Technology, Vol. 39, No. 1-2, 2002, pp. 73-91. [32] D. R. Fuhrman and Per. A. Madsen, “Tsunami Genera- tion, Propagation, and Run-Up with a High-Order Bous-  H. S. HASSAN ET AL. Copyright © 2010 SciRes. ENG 549 sinesq Model,” Coastal Engineering, Vol. 56, No. 7, pp. 2009, 747-758. [33] Xi Zhao, B. Wang and H. Liu, “Modeling the Submarine Mass Failure Induced Tsunamis by Boussinesq Equa- tions,” Journal of Asian Earth Sciences, Vol. 36, No. 1, 2009, pp. 47-55. [34] L. Hammack, “A Note on Tsunamis: their Generation and Propagation in an Ocean of Uniform Depth,” Journal of Fluid Mechanics, Vol. 60, No. 4, 1973, pp. 769-799. [35] D. Dutykh, F. Dias, “Water Waves Generated by a Mov- ing Bottom,” In: A. Kundu Ed., Tsunami and Nonlinear Waves, Geosciences, Springer Verlag, 2007, pp. 65-95. [36] H. S. Hassan, K. T. Ramadan and S. N. Hanna, “Model- ing of Tsunami Generation and Propagation by a Spread- ing Curvilinear Seismic Faulting in Linearized Shal- low-Water Wave Theory,” accepted for publication. [37] W. P. Dillon, J. S. Risch, K.M. Scanlon, P. C. Valentine and T. Higgett, “Ancient Crustal Fractures Control the Location and Size of Collapsed Blocks at the Blake Rscarpment,” east of Florida. Submarine Landslides: Se- lected Studies in the US Exclusive Economic Zone. US Geological Survey Bulletin 2002, US Department of the interior, Denver, 1993, pp. 54-68. [38] P. R. Carlson, H. A. Karl, B. D. Edwards, J. V. Gardner and K. Hall, “Mass Movement Related to Large Subma- rine Canyons along the Beringian Margin, Alaska. Sub- marine Landslide,” Selected Studies in the US Exclusive Economic Zone, US Geological Survey Bullettin 2002, US Department of Interior, Denver, 1993, pp. 104-116. [39] C. E. Gutmacher and W. RNormark, “Sur Submarine Landslide, a Deep-Water Sediment Slope Failure. Sub- marine Landslides,” Selected Studies in the US Exclusive Economic Zone. US Geological Survey Bulletin 2002, US Depth of the interior, Denver, 1993, pp. 158- 166. [40] Hayir, “Ocean Depth Effects on Tsunami Amplitudes Used in Source Models in Linearized Shallow-Water Wave Theory,” Ocean Engineering, Vol. 31, No. 3-4, 2004, pp. 353-361. [41] P. A. Guard and P. Nielsen, “A Simple Model for Tsu- nami Wave Due to Submarine Landslides,” International Coastal Symposium, Session, 5, Republic of Iceland, 2005. |