Global Minimization of Vertex Height Differences for Freeform Architectural Design 661
original outside form of the structure, as designed by the
architect. Triangular mesh elements do not require pla-
narization because their geometry is always planar. The
planarity of an element in a selected mesh should be
executed to the level that still allows the assembly of
closure elements.
Problem Formulation
Figure 4 shows a CAD model, designed according to
planar and conical pre-optimized mesh. Figure 4 shows
the support structure only; composed of joint cylinders
and I beams. In every single joint cylinder (or joint box
[8]) is positioned according to a maximum vertex height
distance (,;maxij ). Therefore the top flange of the corre-
sponding I beam is leveled with the top edge of the joint
cylinder. All the other I beams, having smaller vertex
height distances, must be positioned higher, producing
additional internal loading in the joint cylinder and joint
cylinder-beam connection problems. The idea is to pro-
vide minimal possible joint height differences (,),
between top flange of the I beams in every single joint
cylinder, which significantly reduces additional forces
and moments in a joint cylinder (Figure 7). An post-
optimization algorithm was created to do the task for all
the joints in the structure. In chapter 4, a graphical analy-
sis of joint height differences is made for the entire mesh
of the sample free form structure. Minimization of these
differences in particular joint significantly reduces addi-
tional forces and moments in a joint cylinders.
h
Δij
h
2. Related Work
Not many papers cover our ideas presented in the
introduction. Multi-layer architecture, including planar
and conical meshes was discussed by Pottmann et al. [2,
5,9,10]. Although visually appealing P-hex meshes that
were also extended to meshes with parallel edges. P-hex
geometry inherits similar problems with a physical rea-
lization of vertex. The elimination of edge offset dif-
ferences can be achieved with Koebe polyhedra [11], but
this brings very restrictive geometry, which cannot
approximate arbitrary shapes. Still this is a promising
approach for glass structures with no closure layer
provided. Such surfaces can also be part of the freeform
structure that can be included in mesh optimization as a
rigid body. Pottmann et al. [10] also suggest to appro-
ximate beam offsets with fairness functional during
vertex perturbation. In their optimization they neglect the
physical realization of the vertex junction and concen-
trate on optimization to achieve an approximately con-
stant offset from a theoretical point of view. So far, we
are unaware of any architectural project that should use
the present geometry processing ideas, as it seems that
solutions need to be solved in detail in CAD (Figure 4)
before the realization is possible. In addition, a stress
analysis of such structure is required, which is not a
trivial task as adequate stucture computations are yet to
be determined.
3. Post-Optimization Method
3.1. The Joint Connection Differencesat Cylinder
In this section we briefly present the geometric algorithm
to locate the intersection points between a ray and a
cylinder following the Cychosz and Waggenspack [12]
algorithm.
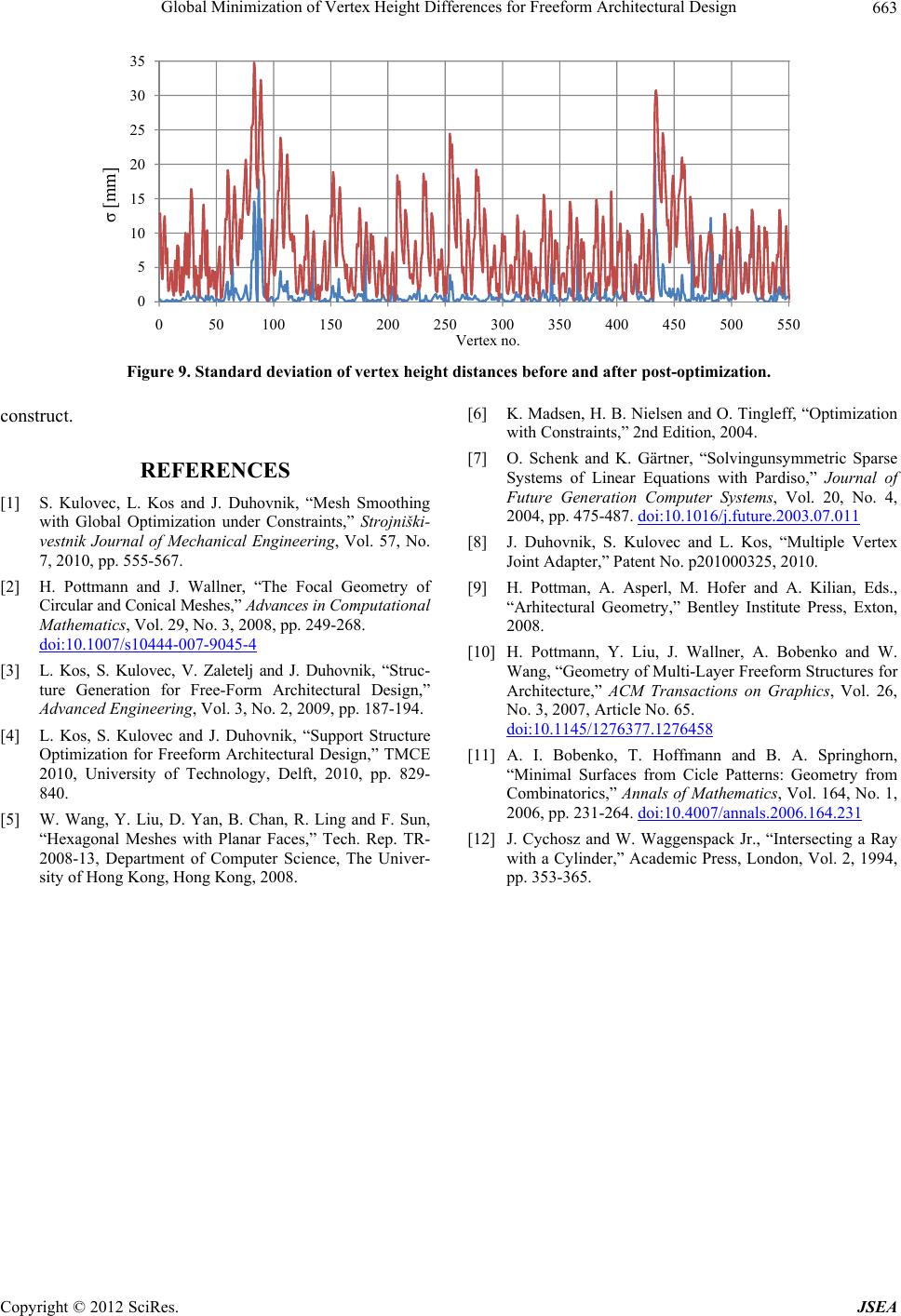
We are only interested in the intersection point in
between the vertex cylinder and the beam. Connecting
height (
Figure 5) from vertex origin and beam-
cylinder intersection in
do
is calculated by projecting
vector in
H
o to vertex normal (see Figure 6). After
some algebra calculations we finally obtain
v
in
in in
H
dH H
vo
ovo (1)
Beam offset distance d can be regarded as a function
of many parameters, face normals, inclination and di
hedral angles. This function is obviously nonlinear and
so is the post-optimization procedure that generally mini-
mizes differences between each beam d in each vertex of
the structure. Solving such global post-optimization
problem can easily lead to local optimums. Especially
when structures are large. Many algorithms from com-
putational geometry try to avoid such situations by
defining local operators rather than solving the problem
globally. In this paper we follow such ideas by intro-
ducing two competitive algorithms with local impact and
compare their results.
3.2. Vertex Element Differences
In order to generate a CAD model, it is necessary to
specify the points where the support structures and the
joint elements are positioned. The beams are displaced at
the fixing points in the joint cylinder. The calculation of
the beam positions, displaced from the reference points,
is shown below.
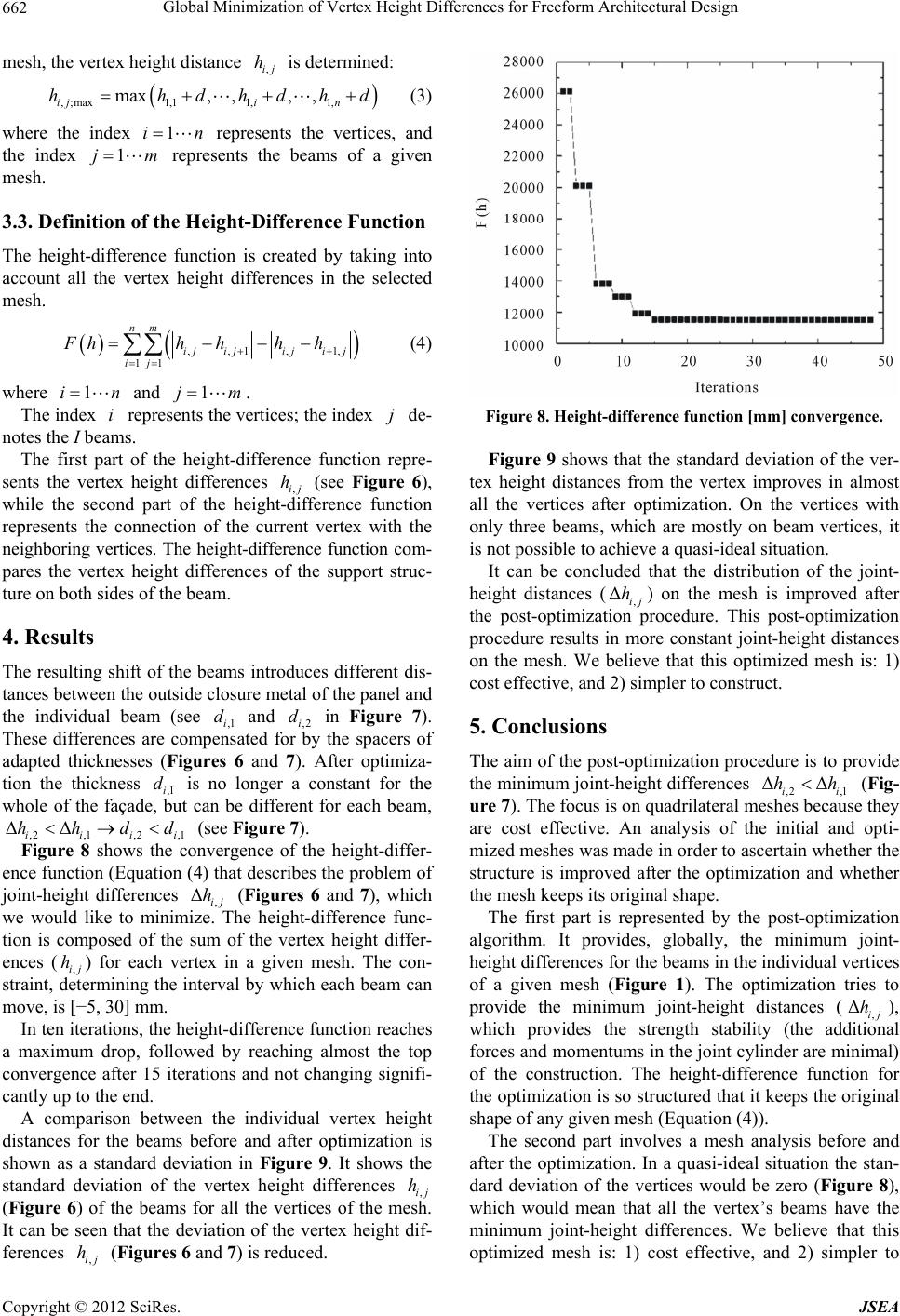
Figure 6 shows a cross-section of the cylindrical joint,
beams with insulation, spacers and outside closure metal.
The outside closure sheet normals 1 and 2 are
joined at the vertex reference point (
Figure 6).
n n
o
,1ij e
hh r
1
1
e
e
nn er
nn
(2)
where
12
12
enn
nnn and
e
rr
e
e
en
en
.
Vertex positioning. For each vertex of the selected
i
Copyright © 2012 SciRes. JSEA