Paper Menu >>
Journal Menu >>
 Engineering, 2010, 2, 420-431 doi:10.4236/eng.2010.26055 Published Online June 2010 (http://www.SciRP.org/journal/eng) Copyright © 2010 SciRes. ENG Isotropic Elastoplasticity Fully Coupled with Non-Local Damage Madjid Almansba1,2, Khémais Saanouni1, Nacer Eddine Hannachi2 1I. C. D. LASMIS, Université de Technologie de Troyes 12, Rue Marie Curie, Troyes Cedex, France 2LAMOMS, Université Mouloud Mammeri Tizi Ouzou, BP 17 Route de Hasnaoua Tizi Ouzou, Tizi Ouzou, Algérie E-mail: almansbm@mail.ummto.dz, khemais.saanouni@utt.fr, hannachina@yahoo.fr Received December 28, 2009; revised February 23, 2010; accepted February 26, 2010 Abstract This paper presents a simple damage-gradient based elastoplastic model with non linear isotropic hardening in order to regularize the associated initial and boundary value problem (IBVP). Using the total energy equivalence hypothesis, fully coupled constitutive equations are used to describe the non local damage in- duced softening leading to a mesh independent solution. An additional partial differential equation governing the evolution of the non local isotropic damage is added to the classical equilibrium equations and associated weak forms derived. This leads to discretized IBVP governed by two algebric systems. The first one, associ- ated with equilibrium equations, is highly non linear and can be solved by an iterative Newton Raphson method. The second one, related to the non local damage, is a linear algebric system and can be solved di- rectly to compute the non local damage variable at each load increment. Two fields, linear interpolation tri- angular element with additional degree of freedom is terms of the non local damage variable D is con- structed. The non local damage variable D is then transferred from mesh nodes to the quadrature (or Gauss) points to affect strongly the elastoplastic behavior. Two simple 2D examples are worked out in order to in- vestigate the ability of proposed approach to deliver a mesh independent solution in the softening stage. Keywords: Elastoplastic, Damage Behaviour Coupling, Isotropic Hardening, Damage Gradient, Finis Elements 1. Introduction It is well known that the local constitutive equation ex- hibiting an induced strain softening which succeeds to the positive strain hardening, leads inevitably to more or less strain localization. Strain localization refers to the emergence of finite narrow bands inside which the plas- tic flow localizes while the remaining part of the de- forming body is elastically unloaded. However, it has been shown in several published works, that the numeri- cal solution (using FEM) of this class of dissipation problems exhibits a high sensitivity to the space and time discretization [1-7]. Among these problems, the fully coupled constitutive equations accounting for positive hardening and damage induced softening (or negative hardening) are extensively studied during the last decade [8]. To regularize the solution of these problems, leads to incorporate some effects of characteristic lengths of the materials microstructure into constitutive models via the mechanics of generalized continue as the higher grade continues [9-12] or higher order continua [13-15]. In these approaches, the stress at a given material point de- pends on additional degrees of freedom as well their higher order spatial derivatives or gradients. The must recent and comprehensive presentation of the mechanics of generalized continua can be found in [13-15]. In this work a simple damage-gradient based elastoplastic con- stitutive equations accounting for the non linear isotropic hardening fully coupled with non local ductile damage variable is presented. Inspired by the works of [6,16] an implicit damage non locality equation is added to the classical equilibrium equations in order to derive a two functional variational formulation with additional degree of freedom which is the non local damage variable. The non local damage variable is introduced on the state and dissipation potentials thanks to the effective state vari- ables based on the assumption of total energy equivalence [17]. A new finite element is then formulated with the non local damage as an additional degree of freedom.  M. ALMANSBA ET AL.421 This leads to two algebric systems, one highly non linear and the other is quite linear giving a non local damage at each load increment. Some simple examples are per- formed in order to show the ability of the proposed ap- proach to avoid the mesh dependency of the solution of the IBVP. 2. On Isotropic Elasto-Plasticity with Damage-Gradient In previous works [8,18] the authors have proposed ad- vanced constitutive equations for sheet or balk metal forming accounting for thermal effect, elasto (visco) pla- sticity, mixed non linear hardening, isotropic ductile damage and contact with friction. These fully coupled multiphysics models has been formulating, in the frame- work of the thermodynamics of irreversible processes assuming a fully local theory in which only the first gra- dient of the displacement is required. In this work, a non local damage variable ()D is introduced in these con- stitutive equations replacing the classical local damage variable (D) by the non local damage variable ()D solution of the following partial differential equation [6]: 0 in (a) grad.0 in (b) D D DdivD Dn (1) The Equation (1(b)) represents the Neumann type boundary condition prescribed on the boundary D of the damaged volume D and ω is homogeneous to a length squared and plays the role of an internal character- istic length of material, governing the non-locality of the damage field. This leads to introduce the damage gradient in the classical local constitutive equations in order to regularize the initial boundary value problem (IBVP) with respect to the space and time discretization. For the sake of simplicity we limit resolves to the fully isotropic and isothermal elastoplasticity assuming the von Mises yield function and non linear isotropic hardening assuming the small strain hypothesis. 2.1. Constitutive Model for Plasticity with Isotropic Hardening and Non Local Damage Following the idea by [19], the non local damage vari- able is computed from Equation (1) and introduced into the local constitutive equations simply by replacing the local damage variable (D) by ()D. The complete set of these constitutive equations fully coupled with non local damage variable is then given by: 1 : 1 : e p D D 1 pn D (2) 1 RDQr (1r1) 1 rb D D (3) 2 11 :: 22 ee YQr 0 1 s YY DS D (4) where “ ” is the Cauchy’s stress tensor, is the stiffness tensor, “e ” the elastic strain tensor, “ p ” is the plastic strain, R and r are respectively the isotropic stress and its isotropic strain, “Q” is the isotropic hard- ening modulus and “b” is non-linearity parameter of the isotropic hardening. “Y” the thermodynamic force associated to the local damage “D” which resolves ac- cording to Equation (4(b)), in which S, s, and Y0 are the ductile damage parameters. The deviatoric tensors n and n define the outward unit normal to the yield func- tion f = 0 in the stress and effective stress spaces respec- tively. They are defined by: 31 1 2111 f Sf n DD n D (5) In these equations “ ” is the classical plastic multi- plier derived from the consistency condition applied to the yield function: 1y R f D (6) in which “y ” is the flow stress in simple tension and 3: 2SS is the von Mises equivalent stress: 1.1 3 Str . If the analytic form of if is de- duced from the consistency condition , 0 0ff one can obtain DD : 31 : 1 0 0 0 else where e pD DS iffand f HS (7) where ˆ 31 12 1 y pD e R HDQbRDY D is the elastoplastic hardening modulus. With ˆ Y 0 1 1 s YY S D . From numerical point of view, Equ- ation (7) is not needed since is taken as the t Copyright © 2010 SciRes. ENG  M. ALMANSBA ET AL. Copyright © 2010 SciRes. ENG 422 principal unknown to be computed from 0 tt f t at the end of each time increment . 1nn tt 3. Numerical Aspects As discussed above the initial and boundary value prob- lem is driven by the partial differential equations (PDEs) describing both the equilibrium problem (the inertia be- ing neglected) and the damage non locality equation (Equation (1 )): F u in (a in (b in (c 0 . v div f nF Uu ) ) ) (8) where v f is the body forces vector. is the outward normal to the boundary n F where the forces vectors F is prescribed ; while is the boundary of the u where the displacement u vector is prescribed uF ¨the boundary of and uF . Both Equation (1) and Equation (8) will be solved us- ing the “displacement” based Galerkin finite element method is discussed here after. 3.1. Variation Formulation and Global Resolution Scheme Let u the virtual displacement vector and D the virtual non local damage both compatible with the boun- dary conditions (i.e. kinematically admissible (K.A)). The weak forms associated with Equation (1) and Equa- tion (8) are easily deduced: , u: ..0 A , D. 0 F D u K. D K.A D u v D Iu ud uf duFds IDD DD DDd Dd (9) Since the domain is discretized into many sub-do- mains (or finites elements) e, then the elementary weak forms written on each element (e) lead to: , u: , D e Fe e D e D ee ee ue ee ev e ee eee D e e Iu ud uFdsf ud I DDDD DDd Consequently, the system (9) can be written under the following discretized when the do main is discretized into “Nele” elements from: 1 1 u K.A. D K.A. Nele e uu e Nele e DD e II II (11) By using the Bubnov-Galerkin method, the real and virtual quantities are approximated over each finite ele- ment (e) according to (the matrix notations will he used): eee eee unu n eee ee nn DD uNu uNu DND DND e (12) where e u N and e D N are the matrices of the shape functions relative to the nodal unknown e u and e D. Their first gradients are then deduced: u u D D e eeee nn j e e ee nn j NuBu x N DDBD xx e (a) u u D D e eee nn j e e ee nn j NuBu x N DDBD xx e e (b) (13) Introducing Equation (12) and Equation (13) in Equa- tion (10) leads to: Dd (10) . .. e ee e e e ue ee e un TT ee ueue T eee k DDD ee e n DT e e D Bd Iuu NTds Nfd BBNDd IDD NDd (14) In Equation (14(b)) [] is the diagonal matrix of in- ternal lengths. 2 2 2 0..0 :.. :..:: 00.. l l l 0 (15)  M. ALMANSBA ET AL. Copyright © 2010 SciRes. ENG 423 DD D TT eeee jDDD Npg T ee jD Npg KBBN FNDJ After the standard assembly operation, the following e D N (18) algebric system written at is obtained: 1n t 1int 1 1 1 =0 (a) =0 (b) D DD ee next en ee n en RFF HKDF (16) where the integrals entering the matrix e DD K and the vectors , and int e F t e ex F e D F can be written with the help of Newton integration method, as follows: int T ee ju Npg T ee e T j uju ext Npg Npg FBJ s F NfJ NTJ (17) From Equation (16) it is worth noting that if the first Equation (16(a)) is highly non linear and should be solved iteratively, the second one Equation (16(b)) is perfectly linear an can be solved directly without any iterative procedure [20]. For this end, a 2D plane strain simple linear (triangle) element is constructed with three degrees of freedom (dof) per node namely two displace- ment components (u, v) and the non local damage (D). Since the dof’s (u, v) are independent from dof (D), similar linear approximation is assumed for both (u,v) and (D). Accordingly a very classical triangular isopa- rametric element with a single integration point is used. The Figure 1 summarizes the resolution scheme used No Yes Increment : t=t+ t Compute 1 111 hh nnn u Compute {} from 1h u Compute 11 1 , , nn n RD Compute 11 int 11 , hh ext nn FF Compute 111 int 111 hhh ext nnn RF F Convergence test Else 1 11 11 h hh T nn uKR Solver for 1n D 1 1DD n n DKD Itération : h+1 Time t=t+1 Figure 1. Flow chart of the global resolution scheme.  M. ALMANSBA ET AL. 424 in this work to solve Equation (16). 3.2. Local Integration Scheme At each time, the calculation of the internal forces in Equation (17(a)) and 1n t int e F D e F in Equation (18(b)) needs the computation of the stress 1n and local damage . This is done through the numerical integration of the fully coupled constitutive equations presented above Equation (2) to Equation (4). The stan- dard elastic prediction and plastic correction algorithm [8,21,22] is used for computation of the stress tensor together with the other state variables of the model. 1n D 3.2.1. Elastic Prediction Elastic prediction stage consists to assume that the given total strain increment is elastic without any dissipation (i.e. 0. ). This leads to define the “trial” stress as: ** 1 1: nn D1 n (19) where * 11 p nn n is the known trial strain su- pposed as purely elastic. The “trial” yield function is then defined by: * 1 * 11 nn n n R f D y (20) The non local damage “D” at each integration point is obtained by linear interpolation from the nodes and is kept contort equal to “n D” during the iterative resolution of the equilibrium equations: If the solution is effectively elastic and the solution is: * 1<0 n f * 111 11 , , , pp nnnnnnn RR DD n (21) If , the trial solution should corrected in order to fulfill the yield criterion. * 1>0 n f 3.2.2. Plastic Correction For the model used here in the plastic flow is governed by the unique scalar equation 1,0 nn fD in which n D is known at each integration point by inter- polation of nodal values. The problem is then to calculate1n , 1n R , 1 p n , which are plastically admissible, i.e., verifying at : 1n D 1 n t 11 10 1 nn n n R f D y (22) By using the time discretisation scheme of the consti- tutive equations one can obtain: * 11 21 nn nn Dn 1 (23) 1 1 1 1 with 1 nn n nn RQ D Rb RQD r n (24) By locking the deviatoric part of 1n from Equation (23) it comes: * 11 21 nn nn SS Dn 1 (25) On the other the normal’s to the yield surface 1n f and “trial” yield surface * f are given by: * * 11 11 * 11 33 and 22 nn nn nn SS nn (26) Combining Equation (25) and Equation (26) leads to: 1 ** 11131 n nnnn n nn D 1 n (27) This equation leads to: 1 * 1 .. return mapping n n nnie (28) And: * 11 31 nn n D (29) Using Equation (29) together with Equation (22) leads to a single scalar equation with as a single un- known: 1 11 pp n nn n n D (30) 10 1 1 1 s n nn n YY DD S D (31) where: ** 11 1 2 2 1:: 211 1 211 nn n nn n n Yn DD Qr bD n (32) 3.3. Tangent Modulus Operator The linearization of Equation (17(a)) using the iterative Newton-Raphson method, requires the computation of the tangent stiffness matrix with a manner consistent with time discritization of the stress 1n as discussed above. From Equation (23) the stress at can be rewritten: 1n t * 11 21 1 nn DDen 1n (33) The tangent matrix is then given by: C opyright © 2010 SciRes. ENG 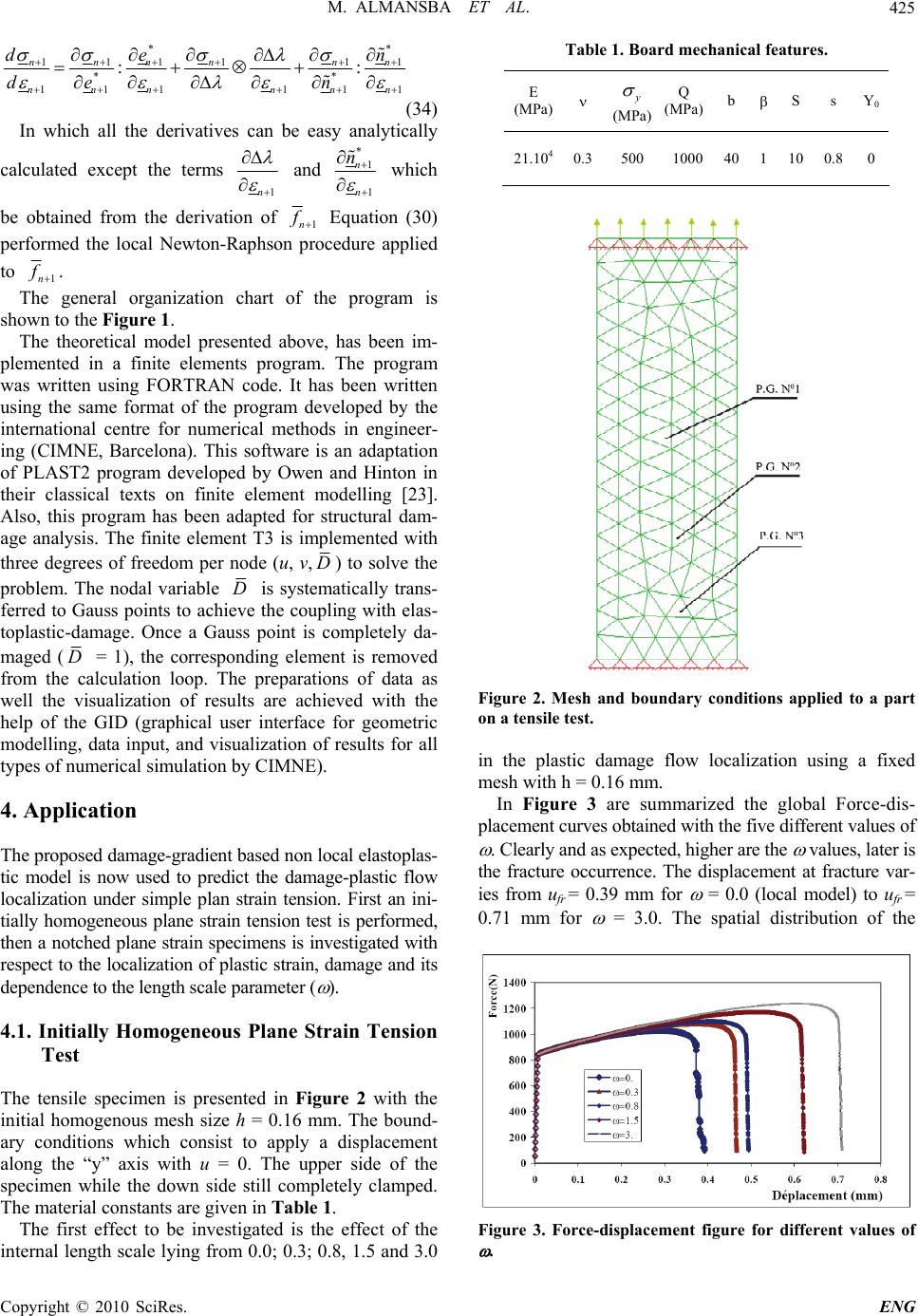 M. ALMANSBA ET AL.425 * 1111 1 ** 11 111 :: nnnn n nn nnn de de n * 1 1 n n n (34) In which all the derivatives can be easy analytically calculated except the terms 1n and * 1 1 n n n which be obtained from the derivation of 1n f Equation (30) performed the local Newton-Raphson procedure applied to 1n f . The general organization chart of the program is shown to the Figure 1. The theoretical model presented above, has been im- plemented in a finite elements program. The program was written using FORTRAN code. It has been written using the same format of the program developed by the international centre for numerical methods in engineer- ing (CIMNE, Barcelona). This software is an adaptation of PLAST2 program developed by Owen and Hinton in their classical texts on finite element modelling [23]. Also, this program has been adapted for structural dam- age analysis. The finite element T3 is implemented with three degrees of freedom per node (u, v,D) to solve the problem. The nodal variable D is systematically trans- ferred to Gauss points to achieve the coupling with elas- toplastic-damage. Once a Gauss point is completely da- maged (D = 1), the corresponding element is removed from the calculation loop. The preparations of data as well the visualization of results are achieved with the help of the GID (graphical user interface for geometric modelling, data input, and visualization of results for all types of numerical simulation by CIMNE). 4. Application The proposed damage-gradient based non local elastoplas- tic model is now used to predict the damage-plastic flow localization under simple plan strain tension. First an ini- tially homogeneous plane strain tension test is performed, then a notched plane strain specimens is investigated with respect to the localization of plastic strain, damage and its dependence to the length scale parameter ( ). 4.1. Initially Homogeneous Plane Strain Tension Test The tensile specimen is presented in Figure 2 with the initial homogenous mesh size h = 0.16 mm. The bound- ary conditions which consist to apply a displacement along the “y” axis with u = 0. The upper side of the specimen while the down side still completely clamped. The material constants are given in Table 1. The first effect to be investigated is the effect of the internal length scale lying from 0.0; 0.3; 0.8, 1.5 and 3.0 Table 1. Board mechanical features. E (MPa) y (MPa) Q (MPa) b S s Y0 21.1040.3500 1000 40 1 10 0.80 Figure 2. Mesh and boundary conditions applied to a part on a tensile test. in the plastic damage flow localization using a fixed mesh with h = 0.16 mm. In Figure 3 are summarized the global Force-dis- placement curves obtained with the five different values of . Clearly and as expected, higher are the values, later is the fracture occurrence. The displacement at fracture var- ies from ufr = 0.39 mm for = 0.0 (local model) to ufr = 0.71 mm for = 3.0. The spatial distribution of the Figure 3. Force-displacement figure for different values of . Copyright © 2010 SciRes. ENG  M. ALMANSBA ET AL. Copyright © 2010 SciRes. ENG 426 accumulated plastic strain and the ductile damage are shown in Figure 4 for = 0.0, = 0.3 and = 1.5 at three different values of the applied displacement u = 0.2 mm, u = 0.3 mm and u = 0.39 mm corresponding to the fracture predicted by the local model with = 0.0. For = 0.0 (i.e. fully local model) the plastic strain and the damage localize more rapidly leading to the final fracture at ufr = 0.39 mm (see Figures 4(a, d, g)). Clearly the damage (a) (b) (c) u = 0.2 =1 = 0.33 = 0 (d) (e) (f) u=0.3 = 0 = 0.3 = 1.5 (g) (h) (j) u = 0.4 = 0.3 = 0 = 1.5 Figure 4. Distribution of plastic strain and damage at different displacement for different e for different values of .  M. ALMANSBA ET AL. 427 d zone localizes inside a single row of elements as indi- cated in Figure 4(g). For the some displacements the localization of the plastic strain and the damage taken place inside a more wide zones as can be seen in Figures 4(b, e, h) for = 0.3 and Figures 4(c, f, j) for = 1.5. Note that when u = 0.39 corresponding to the finale frac- ture of the specimens for = 0.0 (local model), the maximum damage values are assure max 0.36 for = 0.3 and D max 0.17 for = 1.5 for from the final fracture condition D max 0.999D. The final fracture ob- tained with the three values of “ ” can be taken from Figure 3 and the corresponding distribution of the me- chanical fields are given in Figure 5. Clearly, the fully damaged zone (i.e. macroscopic crack) covers a large number of element when = 0.3 and = 1.5 (non local model) while for = 0.0 (local model) the crack width is limited to one element row. These results indicate clearly the effect of the internal length scale in the elastoplastic solution with damage- induced softening. It is worth noting test one the is different from zero, the localization becomes mesh inde- pendent. Also, from Figure 5 the equivalent strain values approach zero inside the fully damaged zone. Clearly the crack paths seems more realistic for the fully local model (i.e. = 0.0) that with the non local model when > 0. In fact the macroscopic crack width follows the shear band for = 0.0, while it covers the wide zone located at the specimen center for > 0.0 (non local model). This is highly questionable from the fracture point of view. Finally, the local stress-plastic strain curves for three different gauss points defined in Figure 2, are given in Figure 6. For the local model (i.e. = 0.0) the evolution of the stress various the plastic strain is the some for the three points as long as the stress state is homogeneous inside the specimens. When the diffuse necking takes place first the point N°3 becomes elastically unloads, while the point N°2 and N°1 continue to be plastically loaded (See Figure 6(a)). Finally, the point N°2 trans- forms into elastic unloading while the point N°1 contin- (a) (b) (c) = 0.3 ufr = 0.47 mm = 1.5 ufr = 0.63 mm = 0 ufr = 0.39 mm Figure 5. Respective distribution of, the plastic strain and at failure for different values of . (a) C opyright © 2010 SciRes. ENG  M. ALMANSBA ET AL. Copyright © 2010 SciRes. ENG 428 (b) (c) (d) Figure 6. The evolution of the von Mises stress and the damage depending on the equivalent plastic strain for = 0.0 and = 1.5. ues to be plastically loaded until elastic unloading while the point N°1 continues to be plastically loaded until the final fracture. The corresponding damage evolves until D = 1 for point N°1 while it saturates at D = 0.35 for point N°2 and D = 0.24 for point N°3, where are never damage evolution is observed since they are elastically unloaded. For the non local (i.e. = 1.5) the stress-plastic strain curves for three points behave similar to the local model according to the needing effect (Figure 6(c)). However, the damage evolves differently without reaching the final  M. ALMANSBA ET AL.429 fracture for point N°3 (Dmax = 0.77) and the point N°2 Dmax = 0.54) while the finale fracture occurs for the point N°1 as can be seen in Figure 6(d). Note that a constant value of with different values of the mesh size, the stress-plastic strain curves have been shown independent from the mesh size as can be fixed in [24]. This aspect is user investigated using double notched specimen. 4.2. Notched Specimen Consider the saves notched specimen as investigated by Peerlings [3] and Nedjar [25] and shown in Figure 7. Three meshes are considered account the notched zone with h = 0.8, h = 0.4 mm and h = 0.2 mm. The some ma- terial constants of table & are used and two values of are investigated: = 0.0 (local model) and = 1.0. In Figure 8 are shown the distribution of the plastic, the damage and the stress at the finale fracture for the three mesh sizes with = 0.0 (local model). Clearly the fully damaged zone is limited to one row of elements for this fully local. However, for the non local model ( = h = 0.8 h = 0.4 h = 0.2 Figure 7. The notched plate, the Boundary conditions, the load type and size of the mesh studies at Neighbourhood notch. h = 0.8h = 0.4 (b) = 0 ufr = 0.9 mm (a) = 0 ufr = 0.8 mm h = 0.2 (c) = 0 ufr = 1.05 mm Figure 8. Respective distribution of the damage, the plastic deformation and the stress of von Mises at failure for = 0. Copyright © 2010 SciRes. ENG  M. ALMANSBA ET AL. Copyright © 2010 SciRes. ENG 430 h = 0.8 h = 0.4 h = 0.2 Figure 9. Respective distribution of the damage, the plastic deformation and the stress of von Mises at failure for = 1. Figure 10. Global response for (a) case = 0 and (b) case = 1. 1.0), we observe, that the fully damaged zone is limited to use row of element for the coarse mesh h = 0.8 (Fig- ure 9(a)) while it develops over many rows of elements for the first mesh as indicated in Figures 9(b) and 9(c). The global force-displacement curves obtained with the three meshes indicated clearly strong dependency to the mesh size for the local model (Figure 10(a)) and are in- dependent from the mesh size for the non local model (Figure 10(b)). 5. Conclusions A simple damage-gradient elastoplastic model with non linear isotropic hardening has been developed and im- plemented into an in-horse finite element program. When applied to a simple plane strain tensile test of initially ( a ) = 1 u fr = 1.275 m m (b) = 1 u fr = 1.27 ( c ) =1 u=1.27m m fr  M. ALMANSBA ET AL.431 homogeneous and initially notched specimen, the model show a clear independence of the results on the mesh size when the internal length scale is non zero. This model will be implanted into a general propose Finite elements program in order to show its ability to give a mesh independent solution for more complex structures as in metal forming. Also the extension to the 3D struc- tures is under program. 6 . References [1] G. Pijaudier-Cabot and Z. Bažant, “Nonlocal Continuum Damage, Localization Instability and Convergence,” In- ternational Journal of Applied Mechanics, Vol. 55, No. 4, 1988, pp. 287-293. [2] K. Saanouni, “Sur l’Analyse de la Fissuration des Mili- eux Elasto-Viscoplastique par la Théorie de l’Endom- magement Continue,” Thèse de Doctorat, Université de Technologie de Compiègne, 1988. [3] T. Svedberg and K. Runesson, “An Adaptive Finite Ele- ment Algorithm for Gradient Theory of Plasticity with Coupling to Damage,” International Journal of Solids Structures, Vol. 37, No. 48-50, 2000, pp. 7481-7499. [4] R. H. J. Peerlings, “Enhanced Damage Modelling for Fracture and Fatigue,” Ph.D. Dissertation, Technische Universiteit Eindhoven, 1999. [5] C. Comi, “A Nonlocal Model with Tension and Com- pression Damage Mechanics,” European Journal of Me- chanics A/Solids, Vol. 20, No. 1, 2001, pp. 1-22. [6] M. Geers, R. Ubachs and R. Engelen, “Strongly Non- Local Gradient-Enhanced Finit Strain Elastoplasticity,” International Journal for Numerical Methods in Engin- eering, Vol. 56, No. 14, 2003, pp. 2039-2068. [7] R. Abu-Al-Rub and G. Voyiadjis, “A Physically Based Gradient Plasticity Theory,” International Journal of Plasticity, Vol. 22, No. 4, 2006, pp. 654-684. [8] K. Saanouni and J.-L. Chaboche, “Comprehencive Struc- tural Integrity,” Vol. 10, 2003. [9] R. Mindlin and N. Eshel, “On First Strain Gradient Theo- ries in Linear Elasticity,” International Journal of Solids and Structures, Vol. 4, No. 1, 1968, pp. 109-124. [10] P. Germain, “The Method of Virtual Power in Continuum Mechanics, Part 2: Microstructure,” SIAM Journal on Applied Mathematics, Vol. 25, No. 3, 1973, pp. 556-575. [11] G. Maugin, “Nonlocal Theories or Gradient-Type Theo- ries: A Matter of Convenience,” Archives of Mechanics, Vol. 31, No. 1, 1979, pp. 15-26. [12] S. Forest and R. Sievert, “Elastoviscoplastic Constitutive Frameworks for Generalized Continua,” Acta Mechanica, Vol. 160, No. 1, 2003, pp. 71-111. [13] A. Eringen, “Microcontinuum Field Theories: Vol. I Foundations and Solids; Vol. II Fluent Media,” Springer, New York, 1999. [14] R. Chambon, D. Caillerie and T. Matsuchima, “Plastic Continuum with Microstructure, Local Second Gradient Theories for Geomaterials,” International Journal of Solids and Structures, Vol. 38, 2001, pp. 8503-8527. [15] S. Forest, “Micromorphic Approach for Gradient Elastic- ity, Viscoplasticity and Damage,” Journal of Engineering Mechanics, Vol. 135, No. 3, 2009, pp. 117-131. [16] R. Peerlings, T. Massart and M. Geers, “A Thermody- namical Motivated Implicit Gradient Damage Framework and its Application to Brick Masonry Cracking,” Com- puter Methods in Applied Mechanics and Engineering, Vol. 193, No. 30-32, 2004, pp. 3403-3417. [17] K. Saanouni, C. Forster and F. Ben-Hatira, “On the Ane- lastic Flow with Damage,” International Journal of Damage Mechanics, Vol. 3, No. 2, 1994, pp. 140-169. [18] K. Saanouni, H. Badreddine and M. Ajmal, “Advances in Virtual Metal Forming Including the Ductile Damage Occurrence: Application to 3D Sheet Metal Deep Draw- ing,” Journal of Engineering Materials and Technology, Vol. 130, No. 2, 2008, 1-11. [19] D. Sornin, “Sur les Formulations Elastoplastiques Non Locales en Gradient d’Endommagement,” Thèse de Doc- torat, Université de Technologie de Troyes, 2007. [20] S. Boers, P. Schreurs and M.Geers, “Operator-Split Damage-Plasticity Applied to Groove Forming in Food Can Lids,” International Journal of Solids and Structures, Vol. 42, No. 14, 2005, pp. 4154-4178. [21] A. Simone, G. Wells and L. Sluys, “From Continuous to Discontinuous Failure in a Gradient-Enhanced Conti- nuum Damage Model,” Computer Methods in Applied Mechanics and Engineering, Vol. 192, No. 41, 2003, pp. 4581-4607. [22] Y. Hammi, “Simulation Numérique de l’Endommagement dans les Procédés de Mise en Forme,” Université de Technologie de Compiègne, 2000. [23] D. R. J. Owen and E. Hinton, “Finite Elements in Plastic- ity, Theory and Practice,” Pineridge Press Limited, Swan- sea, 1988. [24] M. Almansba, K. Saanouni and N. E. Hannachi, “Régu- larisation d'un Modèle Elastoplastique par Introduction d'un Gradient d'endommagement,” XIXème Congrès Français de Mécanique, CFM’09, France, 2009. [25] B. Nedjar, “Elastoplastic-Damage Modelling Including the Gradient of Damage: Formulation and Computational Aspects,” International Journal of Solids and Structures, Vol. 38, No. 30-31, 2001, pp. 5421-5451. Copyright © 2010 SciRes. ENG |