 Journal of Transportation Technologies, 2012, 2, 230-240 http://dx.doi.org/10.4236/jtts.2012.23025 Published Online July 2012 (http://www.SciRP.org/journal/jtts) A Cooperative Distributed System for Real-Time Route Guidance Yaser E. Hawas Civil and Environmental Engineering Department, UAE University, Al Ain, UAE Email: y.hawas@uaeu.ac.ae Received March 22, 2012; revised April 25, 2012; accepted May 20, 2012 ABSTRACT This paper describes a cooperative decentralized architecture for reactive real-time route guidance. The architecture is cooperative in the sense that it allows adjacent local controllers to exchange information regarding the traffic conditions in their territories. A set of local decision rules and associated heuristic functions to support the cooperative architecture are specified. A protocol governing the knowledge exchange among local adjacent controllers is developed. A simula- tion-assignment modeling framework is used for assessing the effectiveness of this cooperative architecture under vari- ous levels of controller knowledge and network traffic congestion. The cooperative decentralized system is tested under various scenarios of knowledge and cooperation and network traffic demand levels. The cooperative system is com- pared against the shortest path algorithm as a benchmark. Keywords: Decentralized System; Real-Time Route Guidance; Local Controllers; Cooperative Systems; Micro-Scopic Simulation 1. Introduction A common approach for route guidance envisions a cen- tral controller with capability to predict driver origin- destination (O-D) trip desires, to optimally assign a path to each driver from origin to destination, as well as to re-route as warranted [1,2]. The reported limitations of centralized systems include the massive data processing and communication needs between the TMC and thou- sands of users at a time. Excessive computing, storage and communication capacities are required at the TMC. As a result, the TMC might be frequently overloaded [3]. Furthermore, such systems were reported to have high system operating costs [4]. In contrast, hierarchical distributed architectures pro- vide for locally oriented real-time reactive strategies for vehicle routing that rely on limited available information [5,6]. In large-scale networks, the need for fast control action in response to local data inputs and perturbations strongly suggests use of distributed information and con- trol structures. While distributed systems have been ex- tensively exploited in areas such as telecommunications and computing network control, only recently have dis- tributed systems been considered as a promising basis for route guidance in vehicular traffic networks. Hawas and Mahmassani [2] developed a non-coopera- tive decentralized structure and a family of heuristic-based rules for reactive real-time route guidance. The premise of this decentralized structure is the ability to deal with varying degrees of information, spatially and temporally. In addition, unlike the centralized predictive approach, it does not require a priori knowledge (or prediction) of the time-dependent OD demand desires. This structure as- sumes a set of local controllers distributed over the net- work. Each local controller is responsible for providing reactive route guidance for vehicles in its territory. The controllers are non-cooperative in the sense that they do not exchange knowledge of the traffic states in their re- spective territories. Local decision rules that incorporate heuristic evaluation functions are specified, reflecting varying degrees of intelligence. The non-cooperative de- centralized architecture has been shown to be computa- tionally efficient, and fairly robust and effective under recurrent as well as incident situations [2]. The use of distributed multi-agent systems to improve dynamic route guidance and traffic management is re- ported in Adler et al. [7]. Inter vehicular communication (IVC) networks provide decentralized solutions for traf- fic management problems [8-11]. IVC networks are in- stantiations of mobile ad hoc networks, which have no fixed infrastructure and instead rely on ordinary nodes to perform network management functions. There are several ITS projects based on IVC networks. FleetNet [9] uses an IVC network to improve the drivers and passengers’ safety and comfort. VGrid [8] proposes solving vehicular traffic flow control problems autono- C opyright © 2012 SciRes. JTTs 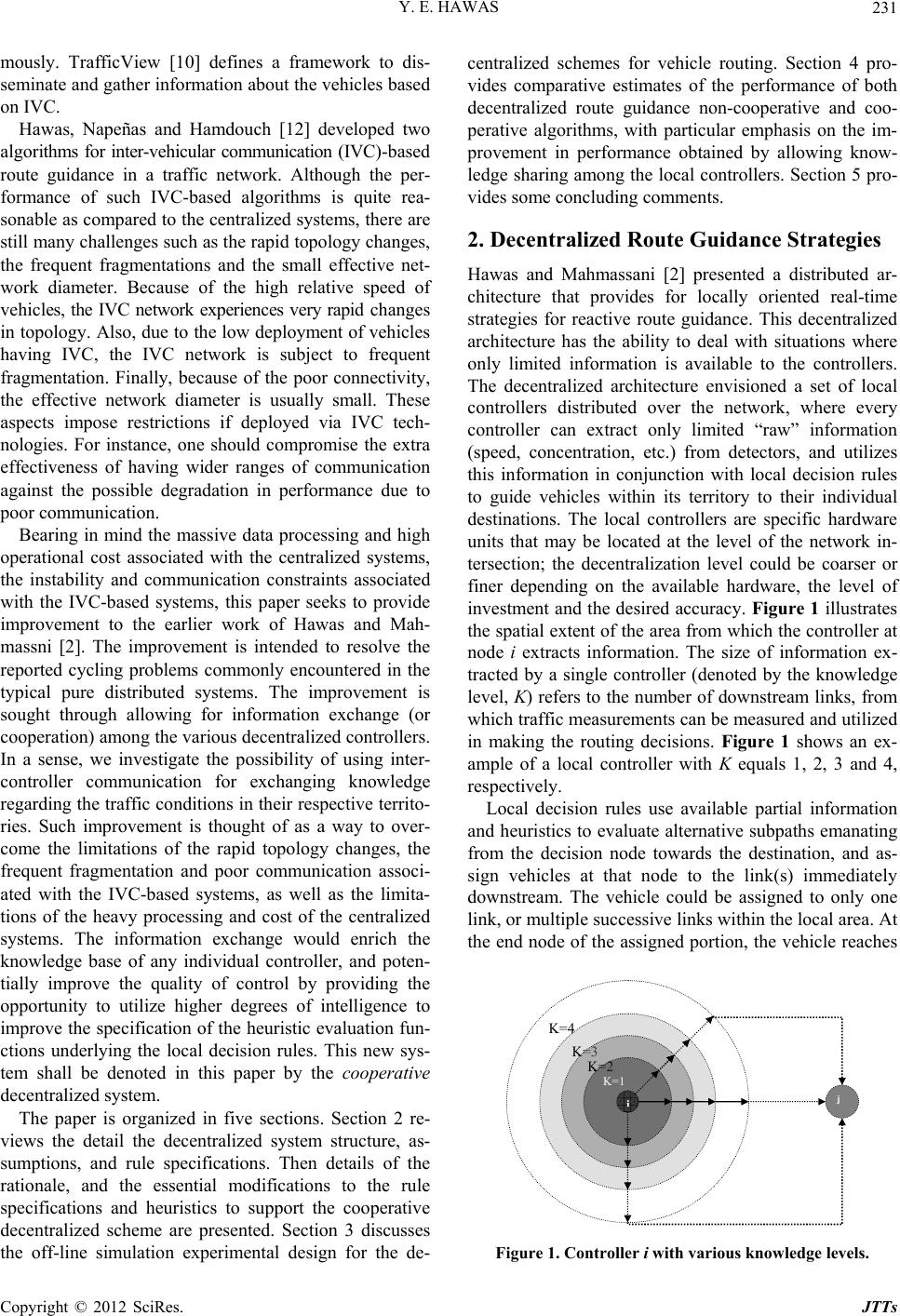 Y. E. HAWAS 231 mously. TrafficView [10] defines a framework to dis- seminate and gather information about the vehicles based on IVC. Hawas, Napeñas and Hamdouch [12] developed two algorithms for inter-vehicular communication (IVC)-based route guidance in a traffic network. Although the per- formance of such IVC-based algorithms is quite rea- sonable as compared to the centralized systems, there are still many challenges such as the rapid topology changes, the frequent fragmentations and the small effective net- work diameter. Because of the high relative speed of vehicles, the IVC network experiences very rapid changes in topology. Also, due to the low deployment of vehicles having IVC, the IVC network is subject to frequent fragmentation. Finally, because of the poor connectivity, the effective network diameter is usually small. These aspects impose restrictions if deployed via IVC tech- nologies. For instance, one should compromise the extra effectiveness of having wider ranges of communication against the possible degradation in performance due to poor communication. Bearing in mind the massive data processing and high operational cost associated with the centralized systems, the instability and communication constraints associated with the IVC-based systems, this paper seeks to provide improvement to the earlier work of Hawas and Mah- massni [2]. The improvement is intended to resolve the reported cycling problems commonly encountered in the typical pure distributed systems. The improvement is sought through allowing for information exchange (or cooperation) among the various decentralized controllers. In a sense, we investigate the possibility of using inter- controller communication for exchanging knowledge regarding the traffic conditions in their respective territo- ries. Such improvement is thought of as a way to over- come the limitations of the rapid topology changes, the frequent fragmentation and poor communication associ- ated with the IVC-based systems, as well as the limita- tions of the heavy processing and cost of the centralized systems. The information exchange would enrich the knowledge base of any individual controller, and poten- tially improve the quality of control by providing the opportunity to utilize higher degrees of intelligence to improve the specification of the heuristic evaluation fun- ctions underlying the local decision rules. This new sys- tem shall be denoted in this paper by the cooperative decentralized system. The paper is organized in five sections. Section 2 re- views the detail the decentralized system structure, as- sumptions, and rule specifications. Then details of the rationale, and the essential modifications to the rule specifications and heuristics to support the cooperative decentralized scheme are presented. Section 3 discusses the off-line simulation experimental design for the de- centralized schemes for vehicle routing. Section 4 pro- vides comparative estimates of the performance of both decentralized route guidance non-cooperative and coo- perative algorithms, with particular emphasis on the im- provement in performance obtained by allowing know- ledge sharing among the local controllers. Section 5 pro- vides some concluding comments. 2. Decentralized Route Guidance Strategies Hawas and Mahmassani [2] presented a distributed ar- chitecture that provides for locally oriented real-time strategies for reactive route guidance. This decentralized architecture has the ability to deal with situations where only limited information is available to the controllers. The decentralized architecture envisioned a set of local controllers distributed over the network, where every controller can extract only limited “raw” information (speed, concentration, etc.) from detectors, and utilizes this information in conjunction with local decision rules to guide vehicles within its territory to their individual destinations. The local controllers are specific hardware units that may be located at the level of the network in- tersection; the decentralization level could be coarser or finer depending on the available hardware, the level of investment and the desired accuracy. Figure 1 illustrates the spatial extent of the area from which the controller at node i extracts information. The size of information ex- tracted by a single controller (denoted by the knowledge level, K) refers to the number of downstream links, from which traffic measurements can be measured and utilized in making the routing decisions. Figure 1 shows an ex- ample of a local controller with K equals 1, 2, 3 and 4, respectively. Local decision rules use available partial information and heuristics to evaluate alternative subpaths emanating from the decision node towards the destination, and as- sign vehicles at that node to the link(s) immediately downstream. The vehicle could be assigned to only one link, or multiple successive links within the local area. At the end node of the assigned portion, the vehicle reaches K=4 K=3 K=2 K=1 j Figure 1. Controller i with various knowledge levels. Copyright © 2012 SciRes. JTTs  Y. E. HAWAS 232 another local controller, where a new assignment is in- structed. A subpath (i, j, m, K) denotes the first (K) links of path (m) from the decision node (i) to destination (j). Assignment decisions are reached after evaluating the various alternative subpaths in the local area. The con- troller uses the current state in the local area and the an- ticipated state outside the local area to evaluate the alter- native subpaths. The subpath evaluation is analogous to that of the A* graph search algorithm, which uses heuris- tic information to decide which node to scan first. The distinctive feature of the A* algorithm is the definition of the evaluation function, F, which has two components: the cost of reaching the node from the start node, G, and the cost of reaching the goal from the node, H. The node to expand is the one for which F = G + H is minimum [13]. Consider a vehicle v going from origin node O(v) to destination node D(v), v = 1, ···, V. Let t denote the time at which v is about to cross a given controller i in its way to D(v). The problem is to assign vehicle v to an outgoing link (or links) emanating from i. Upon reaching the downstream end node of the assigned link(s), the vehicle is similarly assigned to another outgoing link(s), and so on until v reaches D(v). The type of local assignment rule considered here se- lects, at node i, a K-link subpath on the basis of current knowledge of travel time, distance, and concentration along all the possible K-link subpaths (emanating from node i). A penalty function ,, is defined to evaluate the K links on subpath , using their current state. t ij G The anticipated cost of non-local portion of the vehi- cle’s trip (from the end of the subpath to the vehicle’s de- stination) is estimated using a heuristic penalty function ,, . The total penalty, given by ,, ,,,, , provides the basis for evaluating the alternative subpaths. The specification of the heuristic function may reflect varying degrees of “knowledge”, with varying corre- sponding effort in terms of computation, data acquisition, data processing and/or prediction. Figure 2 shows an example of a subpath of nodes from controller i to node j, and illustrates the functions G and H. t ij H tt t ij ij ij FGH Local Area i j b G H Figure 2. The performance functions G and H; F = G + H. Two different structures are discussed afterwards. The first is a non-cooperative structure where controllers work independently. This is denoted by the “pure” de- centralized structure. Every controller is assumed to have access to information and traffic measurements from its own territory, and share no information with adjacent controllers. The second is a cooperative structure, where controllers are envisioned to share useful information with adjacent controllers regarding the traffic states of their own territories. This cooperative scheme provides for the mechanism to enrich the knowledge base of indi- vidual controllers. 2.1. Non-Cooperative Decentralized Route Guidance Hawas and Mahmassani (1996) presented the generalized rules that can be used to distribute vehicles among seve- ral subpaths using a logit splitting model. A generalized subpath penalty function was developed. It comprised local state variables (travel-time and concentration), and non-local variables (anticipated travel time). A penalty coefficient was introduced and associated with each state variable to reflect the variable’s relative impact on the subpath total penalty. The penalty function comprised three sets of state variables: 1) local variables to measure congestion (average weighted concentration); 2) local and non-local variables to measure traveling distance; and 3) local and non-local variables to measure travel time. The local portion of the penalty function was specified as follows: ,, t ij G ,, ,,,,,, ,, tLLtLLtL ijT ijKijSij GTK L S (1) where T , , and S are the penalty coefficients of the current local travel time along subpath at time t, , ,, t ij T, the current average concentration, , ,, t ij K , ,, , and the local traveled distance, ,,ij, respectively. L S t ij T is the sum of the link travel times along subpath at time t; ,, is the sum of link distances along , and is given by: L ij S ,, () L ij a SS a (2) where is the length of link a. ()Sa In Equation (1), , ,, t ij K denotes the average concen- tration along the subpath, as an indicator of the local con- gestion level. The current concentration also reflects the average number of vehicles to be affected by the assign- ment. If the coefficient of this variable is inter- preted as the average additional (marginal) cost imposed on the subpath vehicles, then , ,, Lt ij K would indicate the additional delay (per unit distance) incurred by the subpath vehicles. The effect on the subpath vehicles di- minishes gradually as vehicles get further from the deci- Copyright © 2012 SciRes. JTTs  Y. E. HAWAS 233 sion node. Link concentrations are weighted inversely to account for the spatially diminishing effect, as follows: ,ta C , ,, () 1 () a Lt ij a Da K Da (3) where is the current concentration (vehicles/unit ortion of the eva- lu NL ,ta C distance) of link a at time t, and D(a) is the depth of link a with respect to the decision node, i. The specification of the non-local p ation function, ,, t ij H is given by: ,tNLNLtNL ,, ,,,,ij ijij TS T S (4) where, L T and L S are the penalty coefficients of the non- anticipated travel-time, , ,, local Lt ij T , and the non- local anticipated traveled distance, ,, L S ij, respectively. The state variable , ,, Lt ij T is an approxtion of the an- ima ticipated non-local l time from the end of subpath to destination j; , ,, trave Lt ij T can be calculated by extrapo- ing the local prevg travel time, from historical information, or it may be replaced by corresponding in- formation exchanged from the adjacent controllers under the cooperative scheme as will be discussed later. Because the actual path to be followed beyond lat ailin the lo- cal area boundaries is not known a priori, heuristics are used to obtain coarse estimates of ,, L ij S , and , ,, Lt ij T . While recognizing that the specification could rt varying degrees of intelligence, and involve correspond- ingly varying amount of computational processing; our intent was to test very simple specifications that did not require any network path computations for the non-local portion. A part, eflec icular specification of ,, Lt ij T is given by: , ,, Lt ij , ,, ,, ,, Lt NL ij ij ij TS S (5) The non-local travel distance, T ,, L ij S tes o , is calculated by su (6) (7) The parameters WM and WE are selected a th among several feasible su bstituting the Cartesian coordinaf the subpath end node bn at the boundary and those of the destination node j into a weighted sum of both “Manhattan” (right- angle) and “Euclidean” distances between the two points (Equations (6) and (7)). NL ,, 0.5 22 jbn jbn ij M Ejbn jbn xx yy SW Wxx yy 0,0; and 1 ME ME WW WW ccording to e general network topology. For ideal grid networks the distance between any two nodes is the Manhattan dis- tance, and WM = 1 with WE = 0. This rule distributes vehicles bpaths using a splitting model, which allocates more vehicles to least cost subpaths, and fewer vehicles to sub- paths with worse performance, in an attempt to equalize the performance on all emanating feasible subpaths. A subpath belongs to the subset of feasible subpaths, () ()iFiS (where () Si is the set of all subpaths m i if the ing condition applies: (1), 0 tt FF emanatirong ffollow * ,, ,, ij ij where is the minimum value of * ,, t ij F ,, t ij () Si For . equals 0, ()i includes only the best subpath, * , and this rule opes as all-or-nothing assignment. If erat , then () ()iFSi . The fraction cles assof vehii feasigned to able subpath , is inversely proportional to the penalty value, ,, t ij . veral functional forms could be used for the splitting rule. A standard logit form was used as follows: Se ,, * ,, ,, * ,, ,, ,(),(),,, ij tt ij ij t ij FF f e pfiiijt e (8) The model allocates vehicles to any subpath based on th tt ij FF e difference between the subpath performance, ,, t ij , and the performance of the best subpath, * ,, t ij F. parameter is the dispersion factor and its va typi- cally negative. The above ru The slue i le specification required the calibration of th 2.2. Cooperative Decentralized Route Guidance ,t (9) The term e time-dependent penalty coefficients. A simulation- based optimization procedure that employs a variant of the well-known Hill Climbing Technique was used. The penalty coefficients were calibrated so as to optimize the overall network performance over the analysis period T. A mathematical optimal control formulation is developed for the derivation of the optimal specification of the heu- ristic function ,, t ij G, in a simplified network. The pe- nalty function iecified as the approximate current marginal travel time along the subpath. This can be ex- pressed as: s sp ,, ,,,,,, ,, .. tLt LtL ijijij ij GTMKS ,, ,, ,, Lt Lt ij ij KS g subpath expresses the ve total number of hicles alon. The coefficient M is the av- erage marginal effect of the added vehicle at i on any of the ,, ,, Lt (10) ,, Lt Lt ij ij KS vehicles. The heuristic function can be specified as: , ,, ,, tN ij ij HT Copyright © 2012 SciRes. JTTs  Y. E. HAWAS Copyright © 2012 SciRes. JTTs 234 Exchanging knowledge among l te 2.3. Cooperative Decentralized System Structure ocal controllers is in- same knowledge level K). Figure 4 shows a simplified network (with K = 2) where controllers share information. As shown, controller i receives information from con- troller c and all other depth-K controllers to improve the specification of the heuristic function ,, . Assume that is a subpath from i to j, where c is the boundary node of . Assume subpath f* (f* = [c, m, d]), as shown in Figure 4, is the least travel time subpath from c to j at time t. t ij H nded to reduce the influence of errors introduced by the heuristic function ,, t ij H in calculating the non-local variables. One might utilize abstract or processed infor- mation from neighboring controllers to improve the heu- ristic function specification. While incorporating a higher knowledge level might increase the computational bur- den significantly, combining abstract information (from adjacent controllers) increases the knowledge at negligi- ble cost. The cooperative control scheme envisions a set of controllers connected through a two-way communica- tion system. The exchanged knowledge is incorporated in the heuristic function specification ,, t ij H to better anti- cipate traffic conditions in the non-local portion. Figure 3 outlines a schematic representation of the cooperative distributed system. Different cooperative schemes may be defined de- pe Controller i receives the following information items from controller c at time t: 1) Average concentration in the local area governed by controller c. 2) Estimated travel time estimate from c to the destina- tion node j along the least travel time subpath, f*. The decision controller at i utilizes this information only if c is closer to the destination node, j. nding on the relative locations of the controllers that may exchange knowledge, the information to be ex- changed, and the specification of the heuristic function ,, t ij H. 3) Distance from c to the destination node j along the least travel time subpath, f*. The decision controller at i utilizes this information only if c is closer to the destina- tion node, j. This information is used by controller i to improve the specification of the heuristic function ,, . The heuris- tic function ,, (Equation (4)) is modified by introduc- ing a new variable as well as a penalty factor, t ij H t ij H A two-way communication system is envisioned to allow of the exchanged concentration from c, as will be shown later. Travel time information from c is used to replace the term , ,, Lt ij T in ,, t ij H (Equation (4)) by ** ,1 ,1 ,, ,, tNLt cjf TT , the controller at i to receive knowledge from those con- trollers that reside at its boundary nodes. The territories of any two communicating controllers will overlap and share an area of depth K (if both controllers have the cjf Controller i Goals Local Rules lternatives Evaluation Choice: Sub-path (selection & Share) bstract Knowledge Raw Information Controller Goals Local Rules lternatives Evaluation Choice: Sub-path (selection & Share) bstract Knowledge Raw Information Knowledge Transfer Protocol Figure 3. Structure of the cooperative decentralized system.  Y. E. HAWAS 235 Figure 4. Information exchange with spatial propagation. here ,1Lt T is the prevailing travel time along subpath w* ,,cjf e t −f* at tim 1, and * ,1 ,, Lt T denotes the “anticipated” non-local travel time fro boundary node of subpath f* (node d as shown in Figure 4) to j, at time t − 1. Simi- larly, the distance information is used to replace ,, cjf m the L S (in Equation (4)) by ** LN L SS, where, L cj S ij * ,,f is 2.4. Knowledge Exchange Protocol ing knowledge ,,cjf ,,cjf traveled alothe prevailing distanceng subpathnd f*, a * NL S denotes the “anticipated” non-local distance from ,,cjf the boundary node of subpath f* (node d) to j. Figure 5 shows a controller i exchang with all the boundary controllers [a, b, c, e, f, g, k]. In the figure, concentration information is exchanged between i and all depth-K controllers. Travel time and distance in- formation are utilized from three boundary controllers only [a, b, c]. Denote by, , ,, t ij K, the concentration re- ceived by i (from the control the end node of , c) at time interval t. ler at is the penalty coefficient of the concentration term, , ,, t ij. As indicated previously, this information is procesy controller c, at interval t − 1. The heuristic function ,, t ij H (for subpath from con- troller i at time t) is now re-specified as: ,1 ,Lt tNLNLt K sed b ** ** ,1 ,,,, ,, ,, ,, ,, ,, , ,, NLt ij ij Tcjf cjf LNL NL NL ij Scjf cjf EEt Kij TT HxTy SS xS y K e, x and y are binary indicators. x = 0 and (11) wher y = 1 if fication derived using the optimal control theory. The exchanged kn ** ,, ,, ,, ij cjf cjf (12) where Mrginal cost of f. Note that, is forced to re individual controllers may have full access to rt of the ad ong controllers, i.e sign nducted to assess the ef- d reactive approach, with the Manhattan distance from c to j is greater than the Manhattan distance from i to j, otherwise, x = 1 and y = 0. In other words, the travel time and distance informa- tion are utilized only if the relaying controller, c, is closer to the destination node, j, than the receiving controller, i. The above specification replaces the heuristic function non-cooperative specification (Equation (4)). The same protocol is also applied to the speci owledge is utilized to enhance the heuristic function (Equation (10)) by adding a term that captures the mar- ginal cost along subpath, f*. The travel time information is also utilized according to the binary values of x and y, as indicated above. The specification of the heuristic function becomes: ,1 ,1 , ,, Lt NLt tLt ij TT HxTy * , ,, 2,, Et L ij cjf KS M 2 is the coefficient of the ma if the concentration coefficient, M2 * a value of 0, it will represent the case that concentration information is not exchanged among controllers. Various operational modes can be tested based on the values of x, y, and M2: 1) FCD refers to the fully cooperative decentralized system whe knowledge processed by adjacent depth-K controllers, i.e. x and y values are set according to the controllers locations with respect to the destination node. 2) PCD refers to the partially cooperative distributed system where controllers may only access pa jacent controllers’ information (the concentration is not shared among controllers), i.e. x and y values are set according to the controllers locations with respect to the destination node, but M2 is set to 0. 3) NCD which refers to the non-cooperative scheme that permits no information exchange am . x = 1, y = 0, M2 = 0. 3. Experimental De Simulation experiments are co fectiveness of the decentralize particular emphasis on the cooperative scheme. The latter is tested under various scenarios of network congestion, and knowledge levels. The experiments address the fol- lowing aspects: Copyright © 2012 SciRes. JTTs  Y. E. HAWAS 236 j C a b e f h Depth = K g g m n Controller m: shares only concent rat i on w it h i, x=0, y= 1 Controller n: shares Conce ntrat i on, T ravel Ti m e and D i st ance w i t h i, x=1 , y = 0 i Figure 5. Type of Information utilized from depth-K controllers. The performance of the amined under various network congestion and know- r various network congestion levels, decentralized scheme is ex- ledge levels. The cooperative scheme is evaluated against the above scenarios, fo knowledge levels, and the three operational modes discussed earlier (FCD, PCD and NCD). By compar- ing the network performance under both non-coopera- tive and cooperative decentralized schemes, the mar- ginal effect of the knowledge exchange can be as- sessed under the various knowledge and congestion levels. Under the FCD mode, travel time, distance and concentration information could be exchanged. The PCD mode allows only travel time and distance to be exchanged. Exchanged information replace the heuristic estimates as warranted by the protocol pre- sented earlier. The difference in performance between the NCD, PCD, and FCD modes could be attributed to the effect of exchanged information in the latter modes. Similarly, the difference between the FCD and PCD modes is attributed to the effect of the addi- tional information (namely, , ,, t ij K, average concen- tration). Simulation Modeling To test the overall network performance under the con- decentralized architectures, an analysis period of T (60 minutes) is defined. The solu- pes of control is simulated over i-sim-s simulator (Hawas 2007, Ea trol of both centralized and tions obtained by both ty the analysis period using Hawas and Abdel Hameed, 2009), and estimates of the overall network travel time are obtained for comparative analysis of effectiveness. One hypothetical network is coded for testing. The hypothetical network links are bi-directional with same posted (free-flow) speed. The use of hypothetical net- works for the assessment of the algorithms is quite ade- quate as it enables testing various scenarios of network size, link lengths, speeds, etc. The hypothetical testing network as shown in Figure 6 has 49 nodes, 14 origins and 24 destinations. All intersections are operated with pre-timed controllers. The network is tested under vari- ous conditions of network congestions (demand levels) as shown in Table 1. The experimental setup accounts for the effect of the operational modes (column one), variations in the know- ledge levels (second column), and the variation in the OD demand pattern (third column). The first (1st) column shows the operational modes (FCD, PCD, and NCD). ch mode is tested with three knowledge levels, K (1, 3, 5). Each operational mode (and knowledge levels) is tested with three demand scenarios. As the table indicates Copyright © 2012 SciRes. JTTs  Y. E. HAWAS 237 500 500 500 500 500 500 500 500 500 500 500 500 500 500 (a) 1000 1000 1000 1000 1000 1000 1000 1000 1000 1000 1000 1000 1000 1000 (b) 2000 2000 2000 2000 2000 2000 2000 2000 2000 2000 2000 2000 2000 2000 (c) Figure 6. Demand patterns of the test network: (a) Low; (b) Medium and (c) High intensities. Table 1. Testing scenarios. Operational Mode Knowledge Level (K) Source Volume (veh/hr) 500 1000 1 2000 500 1000 3 2000 500 1000 FCD (Fully Cooperative) 5 2000 500 1000 1 500 1000 1000 PCD (Partially Cooperative) 5 1 3 NCD (Not-Cooperative) 5 Benchmark: SPA (Shortest Path Algorithm) 2000 3 2000 500 2000 500 1000 2000 500 1000 2000 500 1000 2000 500 1000 2000 the FCD is tested twenty seven (27) times. The “network demand” scenarios are aime ing the effect of the operational mode, and ow- ledge level under various network demand vos. As such, all the network demand experiments are carried out for the same network topograp (link leng kept fixed; 500 m) and same link speed (80 km/hr). The traffic loading intensity varies from loource volume of eh/hr), mediumource volum1000 veh/hrce volume of 2000 veh/n all tested scenarios, the source volumes are equally distri- buted among all possible destinations. The Shortest Path AlgorithmSPA) is us the benchmark in all the above set of experimentat is, d at study- the kn elum hyth is w (s 500 v (se of r) and high (souhr). I (sed a s. Th Copyright © 2012 SciRes. JTTs  Y. E. HAWAS 238 the resulting network performance (the overatwork tra thorrespondilue if a ryed. Ex dation in pe of 500, 1000 and mark SPA Travel Time with Respect to NCD ll ne vel eal-time SPA is deplo time) is compared withe cng va 4. Experimental Results periments with the various operational modes were conducted using various network demand levels (500, 1000 and 2000 veh/hr) and knowledge levels (1, 3 and 5), and results are summarized in Table 2 and Figure 7. At very low knowledge levels, vehicles may cycle in the network, and this may lead to high degra rformance compared to the benchmark. The results in- dicate that the marginal improvement in performance is higher for low knowledge levels. The decentralized scheme is tested under three know- ledge levels (1, 3 and 5), demand levels Table 2. Cooperative decentralized system performance. Demand Level Knowledge Level Operational Mode Total Travel Time as % of the Bench Difference in Performance NCD 131 - PCD 126 5 1 FCD 124 7 NCD 122 - PCD 120 2 3 500 FCD 117 5 NCD 118 - PCD 117 1 5 FCD 116 2 NCD 137 - PCD 130 7 1 FCD 122 15 NCD 122 5 1 3 2000 NCD 123 - PCD FCD 120 118 3 5 - 3 PCD 119 3 1000 FCD 118 4 NCD 142 - PCD 135 7 FCD 128 14 NCD 131 - PCD 127 4 FCD 124 7 NCD 129 - PCD 128 1 5 FCD 126 3 CD PCD FCD K=1 3 K=5 K= 105 110 115 0 125 0 135 % Relative Trave Time 12 l 13 O eratio na Mode Knowledge Soume = 500 v (a) Level urce Voleh/ h r CD PCD FCD K=1 K=3 K=5 105 110 115 120 125 130 140 % Relative Travel Time Operational Mode Knowledge Level Soume = 1000 veh (b) 135 rce Volu/hr CD PCD FCD K=1 K=3 K=5 11 5 120 125 130 135 % Relative Travel Tim e O 140 145 erationa Mode Knowledge Level (c) Figure 7. Performance of various cooperative schemes un- der various knowledge levels and (a) Low; (b) Medium and (c) High traffic intensities. Source Volume = 2000 veh/hr 2000 veh/hr, and the three operational modes (FCD, PCD, and NCD). Table 2 shows the performance of the various operational modes in relative terms of the corre- sponding benchmark performance. The results indicate that under low congestion levels (500 veh/hr), the relative performance of the FCD mode ranges from 116% to 124%, and that makes this coopera- tive mode even more competitive with the centralized Copyright © 2012 SciRes. JTTs  Y. E. HAWAS 239 SPA scheme. Under the 500 veh/hr scenario, the FCD mode resulted in about 7% reduction in overall travel time with know- ledge level of 1, 5% with knowledge level of 3, and only 2% with knowledge level of 5 when compared to the non-cooperative scheme NCD. Under highly congested situations (2000 veh/hr), the reductions in overall travel time are 14%, 7% and 3% for knowledge levels of 1, 3 and 5, respectively. The relative performance of the FCD mode ranges from 126% to 128%. The effect of adding , ,, t ij K to the heuristic function (between the FCD and PCD schemes) is notable at low knowledge and/or low congestion levels. At high know- ledge levels, the concentration information, , ,, t ij K, ap- pears to have a limited im on performance, and the local concentration variable, pact , ,, t, becomes adequate to ) achieved with the partial sess the effectiveness of the pr nal cost associated with the centralized systems, th territo- ries. Such improvement is thought of as a way to over- opology changes, the ij capture the marginal cost. The higher the knowledge level, the lesser the im- provement (compared to NCD K information scheme, PCD. Under limited knowledge le- vels, system performance can be enhanced by exchanged information. At high knowledge levels, the time lag as- sumed in transferring knowledge affects the accuracy of heuristic function estimates as compared to actually ex- perienced values, and situations where the PCD mode, or even the FCD mode, are worse than NCD could be ob- served. To conclude, it is evident that the fully cooperative mode, FCD, exhibited a highly competitive performance compared to the centralized SPA scheme. The gain in performance achieved by the cooperative scheme de- clines with higher knowledge levels. The enhancement in performance under low knowledge levels, at which the non-cooperative scheme seems less effective, is quite significant. By achieving significant enhancement in per- formance under low knowledge levels, with negligible computational cost, the decentralized cooperative system becomes a very appealing route guidance system. 5. Concluding Comments This paper presented a decentralized architecture that can be employed as a cooperative scheme for real-time route guidance in urban traffic nes. Simulation experi- ments were performed to as twork oposed architecture. Under the cooperative scheme, the performance under low knowledge levels, at which the non-cooperative scheme seems less effective, is highly competitive with the SPA. By achieving significant en- hancement in performance under low knowledge levels, with negligible computational cost, the decentralized co- operative system becomes a very appealing route gui- dance system with good potential for early deployment. Bearing in mind the massive data processing and high operatio e instability and communication constraints associated with the IVC-based systems, this paper seeks to provide improvement to the pure non-cooperative decentralized systems. The improvement is intended to resolve the re- ported cycling problems commonly encountered in the typical pure distributed systems. The improvement is sought through allowing for information exchange (or cooperation) among the various decentralized controllers. In a sense, we investigate the possibility of using inter- controller communication for exchanging knowledge regarding the traffic conditions in their respective come the limitations of the rapid t frequent fragmentation and poor communication associ- ated with the IVC-based systems, as well as the limita- tions of the heavy processing and cost of the centralized systems. Further work will include the comparison of the pre- sented system against the IVC-based route guidance sys- tems reported in Hawas et al. (2009). It is expected that the two systems may exhibit similar performance as compared to the centralized system. Nonetheless, the cooperative decentralized system is expected to add no significant burden on the communication network. That is, in this case the IVC-based system, each vehicle com- municates with many other vehicles, and this implies heavy communication and inter-vehicle processing re- quirements. In the case of the cooperative decentralized system the communication requirements are heavily re- duced as each vehicle communicates only with one con- troller at a time. The fact that this communication is local with short distances allows for cheap communication media to be utilized. REFERENCES [1] J. L. Adler, et al., “A Multi Agent Approach to Coopera- tive Traffic Management and Route Guidance,” Trans- portation Research Part B, Vol. 39, No. 4, 2005, pp. 297- 318. doi:10.1016/j.trb.2004.03.005 [2] J. Anda, et al., “VGrid: Vehicular ad Hoc Networking and Computing Grid for Intelligent Traffic Control,” Proceedings of the IEEE 61st Vehicular Technology Con- ference, vol. Vol. 61, No. 5, 2005, pp. 2905-2909. [3] L. Chen, et al., “VGITS: ITS Based on Intervehicle Communication Networks and Grid Technology,” Jour- nal of Network and Computer Applications, Vol. 31, No. 3, 2007, pp. 285-302. doi:10.1016/j.jnca.2006.11.002 [4] Y .E. Hawas, “A Microscopic Simulation Model for In- cident Modeling in Urban Networks,” Transportation Planning and Technology, Vol. 30, No. 2, 2007, pp. 289- 309. doi:10.1080/03081060701398117 [5] Y. E. Hawas and M. Abdel Hameed, “A Multi-Stage Procedure for Validating Microscopic Traffic Simulation Models,” Journal of Transportation Planning and Tech- nology, Vol. 32, No. 1, 2009, pp. 71-91. Copyright © 2012 SciRes. JTTs  Y. E. HAWAS Copyright © 2012 SciRes. JTTs 240 doi:10.1080/03081060902750686 [6] Y. E. Hawas and H. S. Mahmassani, “Comparative Analysis of Robustness of Centralized and Distributed Network Route Control Systems in Incident Situations,” Transportation Research Record, Vol. 1537, 1996, pp. 83-90. doi:10.3141/1537-12 [7] Y. E. Hawas, et al., “Comparative Assessment of In- ter-Vehicular Cofor Real- Time Traffic rnal of Intelligent mmunication (IVC) Algorithms Route Guidance,” Jou Transportation Systems: Technology, Planning and Ope r a - tions, Vol. 13, No. 4, 2009, pp. 199-217. doi:10.1080/15472450903323107 [8] J. Jeremy, et al., “Challenges of Intervehicle ad Hoc Networks,” IEEE Transaction on Intelligent Transporta- tion System, Vol. 5, No. 4, 2004, pp. 347-351. doi:10.1109/TITS.2004.838218 [9] C. J. Jiang, et al., “Research on Traffic Information Grid,” Journal of Computer Search and Development, Vol. 40, No. 12, 2003, pp. 1676-1681. [10] H. S. Mahmassani and S. Peeta, “System Optimal Dy- namic Assignment for Electronic Route Guidance in a Congested Traffic Network,” Springer-Verlag, Heidel- berg, 1995. [11] H. S. Mahmassani and Y. E. Hawas, “Expe Rolling Horizon Dynamic Route riments with a Guidance Algorithm: le Traffic s of the 2004 IEEE In- , Assignment and oblem Solving,” Addison-Wesley Publishing ol. 27, No. 6, 1982, pp. Robustness under Stochastic Demands,” Paper Presented at the INFORMS, Atlanta, 1996. [12] T. Nadeem, et al., “Traffic View: A Scalab Monitoring System,” Proceeding ternational Conference on Mobile Data Management, Berkeley, 19-22 January 2004, pp. 13-26. [13] M. Papageorgiou, “Dynamic Modeling Route Guidance in Traffic Networks,” Transportation Research, Vol. 24, No. 6, 1990, pp. 471-495. [14] J. Pearl, “HEURISTICS: Intelligent Search Strategies for Computer Pr Co. Inc., Boston, 1984. [15] P. E .Sarachick and U. Ozguner, “On Decentralized Dy- namic Routing for Congested Traffic Networks,” Trans- actions on Automatic Control, V 1233-1238. [16] L. Wischhof, et al., “Information Dissemination in Self Organizing Intervehicle Networks,” IEEE Transactions on ITS, Vol. 6, No. 1, 2005, pp. 90-101.
|