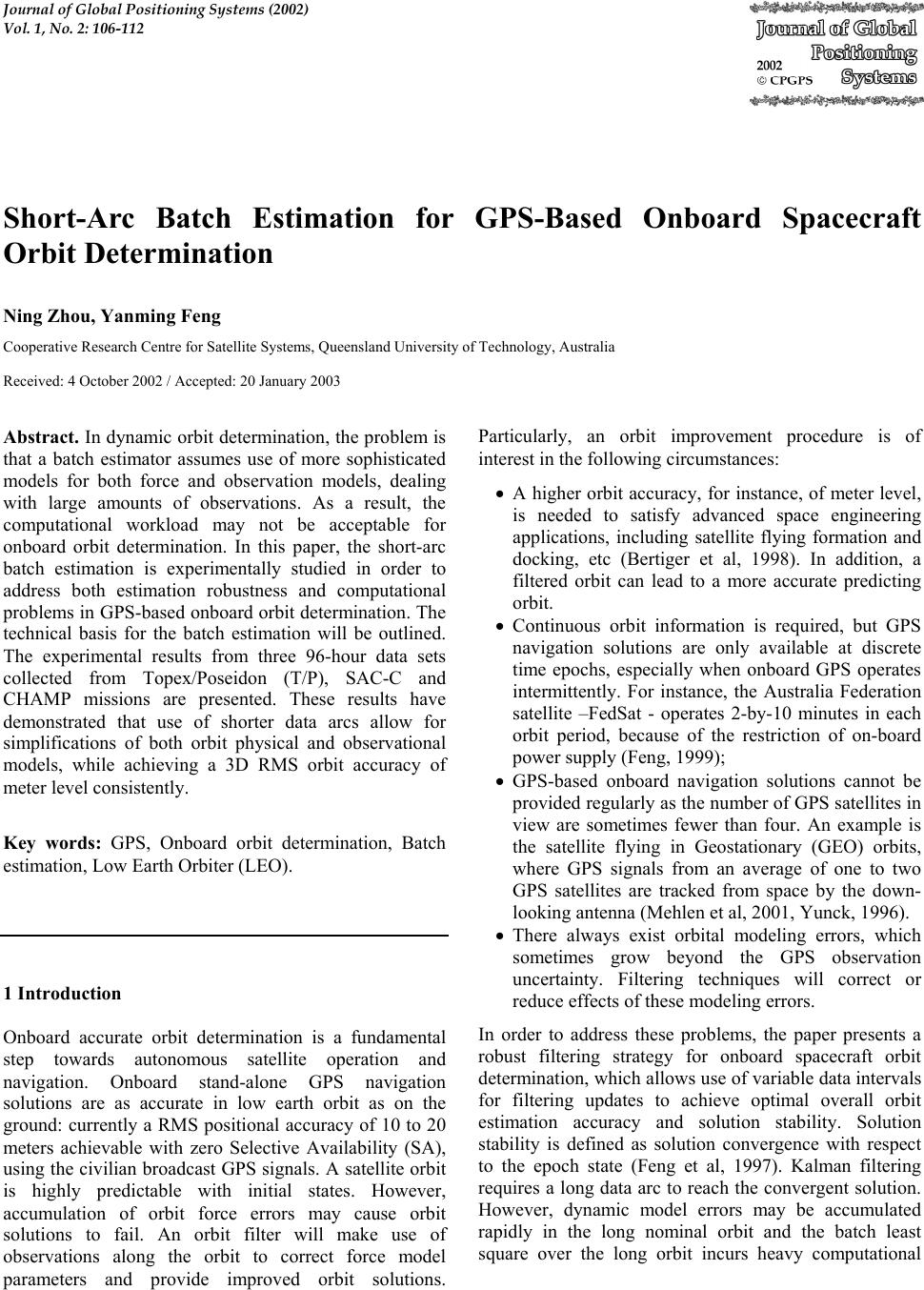
 Journal of Global Positioning Systems (2002) Vol. 1, No. 2: 106-112 Short-Arc Batch Estimation for GPS-Based Onboard Spacecraft Orbit Determination Ning Zhou, Yanming Feng Cooperative Research Centre for Satellite Systems, Queensland University of Technology, Australia Received: 4 October 2002 / Accepted: 20 January 2003 Abstract. In dynamic orbit determination, the problem is that a batch estimator assumes use of more sophisticated models for both force and observation models, dealing with large amounts of observations. As a result, the computational workload may not be acceptable for onboard orbit determination. In this paper, the short-arc batch estimation is experimentally studied in order to address both estimation robustness and computational problems in GPS-based onboard orbit determination. The technical basis for the batch estimation will be outlined. The experimental results from three 96-hour data sets collected from Topex/Poseidon (T/P), SAC-C and CHAMP missions are presented. These results have demonstrated that use of shorter data arcs allow for simplifications of both orbit physical and observational models, while achieving a 3D RMS orbit accuracy of meter level consistently. Key words: GPS, Onboard orbit determination, Batch estimation, Low Earth Orbiter (LEO). 1 Introduction Onboard accurate orbit determination is a fundamental step towards autonomous satellite operation and navigation. Onboard stand-alone GPS navigation solutions are as accurate in low earth orbit as on the ground: currently a RMS positional accuracy of 10 to 20 meters achievable with zero Selective Availability (SA), using the civilian broadcast GPS signals. A satellite orbit is highly predictable with initial states. However, accumulation of orbit force errors may cause orbit solutions to fail. An orbit filter will make use of observations along the orbit to correct force model parameters and provide improved orbit solutions. Particularly, an orbit improvement procedure is of interest in the following circumstances: • A higher orbit accuracy, for instance, of meter level, is needed to satisfy advanced space engineering applications, including satellite flying formation and docking, etc (Bertiger et al, 1998). In addition, a filtered orbit can lead to a more accurate predicting orbit. • Continuous orbit information is required, but GPS navigation solutions are only available at discrete time epochs, especially when onboard GPS operates intermittently. For instance, the Australia Federation satellite –FedSat - operates 2-by-10 minutes in each orbit period, because of the restriction of on-board power supply (Feng, 1999); • GPS-based onboard navigation solutions cannot be provided regularly as the number of GPS satellites in view are sometimes fewer than four. An example is the satellite flying in Geostationary (GEO) orbits, where GPS signals from an average of one to two GPS satellites are tracked from space by the down- looking antenna (Mehlen et al, 2001, Yunck, 1996). • There always exist orbital modeling errors, which sometimes grow beyond the GPS observation uncertainty. Filtering techniques will correct or reduce effects of these modeling errors. In order to address these problems, the paper presents a robust filtering strategy for onboard spacecraft orbit determination, which allows use of variable data intervals for filtering updates to achieve optimal overall orbit estimation accuracy and solution stability. Solution stability is defined as solution convergence with respect to the epoch state (Feng et al, 1997). Kalman filtering requires a long data arc to reach the convergent solution. However, dynamic model errors may be accumulated rapidly in the long nominal orbit and the batch least square over the long orbit incurs heavy computational  Zhou and Feng: Short-Arc Batch Estimation for Orbit Determination 107 burden, which may be unacceptable for the spacecraft onboard processing environment. After a brief description of the batch estimation algorithms, the paper presents extensive experimental results from three Low Earth Orbiter (LEO) missions. The experimental studies include both commission and omission errors in an attempt to arrive at a realistic error estimate. The data analysis will focus on effects of orbit dynamic models, GPS measurement quality and the performance of batch orbit filtering solutions with different lengths of data arcs. 2 Theoretical Basis From the point of view of celestial dynamics, the differential equation of motion of a satellite could be expressed in this form: () rrFrr &&& ,t, r GM 3+−= (1) where: r && is the satellite acceleration vector r is the satellite position vector GM is the product of the gravitational constant G and earth mass M r 3 r GM − is the acceleration force due to the central body of the earth F is a function of the spacecraft state and time, it represents all the perturbation forces acting on the satellite The perturbed forces acting on the spacecraft include non-spherically and inhomogeneous mass distribution within the Earth (central body); the third celestial bodies (sun, moon etc), earth and oceanic tides; the atmospheric drag, solar radiation pressure and geomagnetic effects, etc. Simplification of force models is necessary in the onboard processing environment. However, for low earth orbiters (LEO), special care has to be taken to minimise the effects of the remaining modeling errors of the atmospheric drag force, in order to achieve the required orbit accuracy. The explicit term for the acceleration due to the atmospheric drag can be presented as a v-vV V = −= V m SC FD D ρ 2 1 (2) where is the drag coefficient, S/m is the ratio of spacecraft effective area to its mass; is the atmospheric mass density at the current location of the spacecraft; V is the velocity vector relative to the kinetic atmosphere; v and v D C ρ a are the geocetric velocity vectors of the satellite and atmosphere. It is obvious that FD depends on parameters C, S/m, v Da, and the distribution of atmospheric mass density. The difficulty is that all the three quantities have uncertainties: 0 H r σ − • the drag coefficient is an empirical number, D C • the ratio S/m varies due to the attitude variation of the satellite traveling along its path; • the rotating velocity of the kinetic atmosphere varies from 0.8 to 1.4 for the orbits between 200km to 1200 km; The mess density ρ for the air particles responds sensitively to the solar activity, season, longitude, latitude, local time and magnetic storm conditions. The widely referred models include those in the CIRA (Cooperative Institute for Research in the Atmosphere) series, such as CIRA-61, CIRA-65, CIRA 72, and CIRA 86; those in the Jacchia series, such as J- 65, J-71 and J-77. There are also MSIS83, MSIS86, MSIS 90 (Hedin, 1991) and Drag Temperature Model (DTM) (Barlier at al.1977, Bruinsma and Thuillier, 2000). To allow for easy autonomous onboard processing, we use a simplified model for the calculation of the upper atmospheric density (Liu, 2000): ]) )( exp[ 2 1( 0 2 0H r σµ ρρ − − += (3) In this equation, ρ0 is the density of the Earth’s atmosphere at a reference point with the altitude H0; r is the altitude of the spacecraft; µ= 0.10, σ is the distance between the centre of the Earth and the reference point. In the batch estimation, the value of −= m SC BD 2 1 is considered as a constant over a short data arc (eg, a few to several hours), or as a function of the arc length: B=B0+B1 (t-t0) (4) to be estimated together with the orbit state parameters. Satellite orbit determination has two distinct procedures: orbit integration and orbit improvement. Orbit integration yields a nominal orbit trajectory while orbit improvement estimates the epoch state with all the measurements collected over the data arc in a batch estimation manner. Generally, numerical methods of varying complexity are applied for propagating the state vector between its update intervals, which are of minutes, hours or days. There are many numerical methods to solve the differential equation, such as RK (F), Adams and Cowell methods. An efficient method of orbit integration, called the Integral Equation (IE) method, has been developed in our research efforts. The numerical solution of the 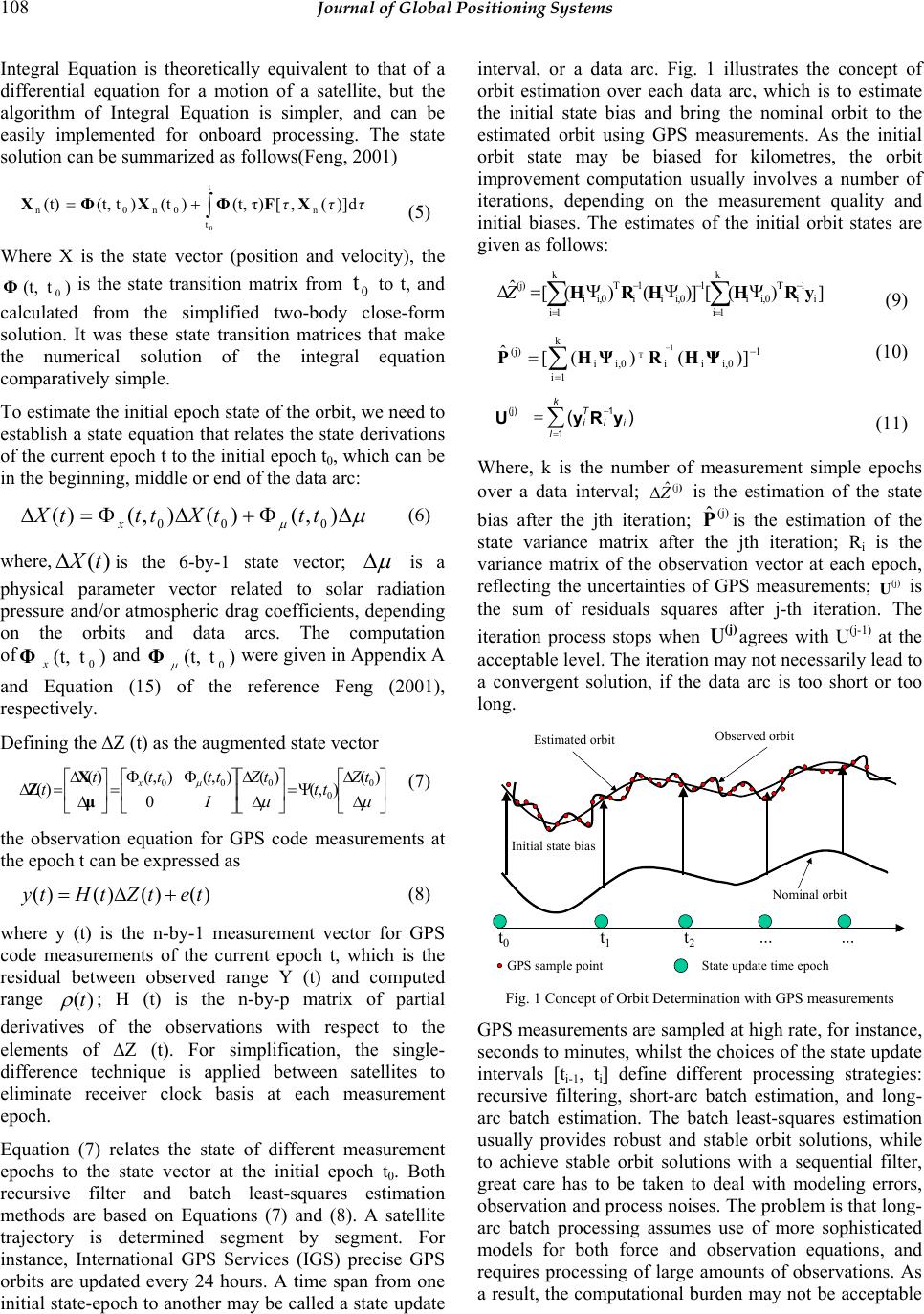 108 Journal of Global Positioning Systems Integral Equation is theoretically equivalent to that of a differential equation for a motion of a satellite, but the algorithm of Integral Equation is simpler, and can be easily implemented for onboard processing. The state solution can be summarized as follows(Feng, 2001) τττ d)](,[τ)(t,)(t)t(t,(t) n t t 0n0n 0 XFΦXΦX∫ += (5) Where X is the state vector (position and velocity), the is the state transition matrix from to t, and calculated from the simplified two-body close-form solution. It was these state transition matrices that make the numerical solution of the integral equation comparatively simple. )t(t, 0 Φ0 t To estimate the initial epoch state of the orbit, we need to establish a state equation that relates the state derivations of the current epoch t to the initial epoch t0, which can be in the beginning, middle or end of the data arc: µ µ ∆Φ+∆Φ=∆ ),()(),()( 000 tttXtttX x (6) where, is the 6-by-1 state vector; is a physical parameter vector related to solar radiation pressure and/or atmospheric drag coefficients, depending on the orbits and data arcs. The computation of Φand Φwere given in Appendix A and Equation (15) of the reference Feng (2001), respectively. )(tX∆ )t(t,0 µ ∆ x)t(t, 0 µ Defining the ∆Z (t) as the augmented state vector ∆ ∆ Ψ= ∆ ∆ ΦΦ = ∆ ∆ =∆ µµ µ )( ),( )( 0 ),(),()( )( 0 0 000 tZ tt tZ I ttttt tx µ X Z (7) the observation equation for GPS code measurements at the epoch t can be expressed as )()()()( tetZtHty+∆= (8) where y (t) is the n-by-1 measurement vector for GPS code measurements of the current epoch t, which is the residual between observed range Y (t) and computed range ; H (t) is the n-by-p matrix of partial derivatives of the observations with respect to the elements of ∆Z (t). For simplification, the single- difference technique is applied between satellites to eliminate receiver clock basis at each measurement epoch. )(t ρ Equation (7) relates the state of different measurement epochs to the state vector at the initial epoch t0. Both recursive filter and batch least-squares estimation methods are based on Equations (7) and (8). A satellite trajectory is determined segment by segment. For instance, International GPS Services (IGS) precise GPS orbits are updated every 24 hours. A time span from one initial state-epoch to another may be called a state update interval, or a data arc. Fig. 1 illustrates the concept of orbit estimation over each data arc, which is to estimate the initial state bias and bring the nominal orbit to the estimated orbit using GPS measurements. As the initial orbit state may be biased for kilometres, the orbit improvement computation usually involves a number of iterations, depending on the measurement quality and initial biases. The estimates of the initial orbit states are given as follows: ∑ ∑ = − − = − Ψ Ψ Ψ = ∆ k 1 i i 1 i T i,0 i 1 k 1 i i,0 i 1 i T i,0 i (j) ] ) ( [ ] ) ( ) ( [ ˆ y R H H R H Z (9) 1 k 1i i,0iii,0i (j) ])()([ ˆ1 T− = ∑− =ΨHRΨHP (10) ∑ = − = k l i i T i 1 1 (j) ) ( U y R y (11) Where, k is the number of measurement simple epochs over a data interval; is the estimation of the state bias after the jth iteration; Pis the estimation of the state variance matrix after the jth iteration; R ) (j ˆ Z∆ (j) ˆ (j) i is the variance matrix of the observation vector at each epoch, reflecting the uncertainties of GPS measurements; U is the sum of residuals squares after j-th iteration. The iteration process stops when Uagrees with U (j) (j-1) at the acceptable level. The iteration may not necessarily lead to a convergent solution, if the data arc is too short or too long. t0t1 Observed orbit Estimated orbit Nominal orbit Initial state bias GPS sample pointState update time epoch t2··· ··· Fig. 1 Concept of Orbit Determination with GPS measurements GPS measurements are sampled at high rate, for instance, seconds to minutes, whilst the choices of the state update intervals [ti-1, ti] define different processing strategies: recursive filtering, short-arc batch estimation, and long- arc batch estimation. The batch least-squares estimation usually provides robust and stable orbit solutions, while to achieve stable orbit solutions with a sequential filter, great care has to be taken to deal with modeling errors, observation and process noises. The problem is that long- arc batch processing assumes use of more sophisticated models for both force and observation equations, and requires processing of large amounts of observations. As a result, the computational burden may not be acceptable 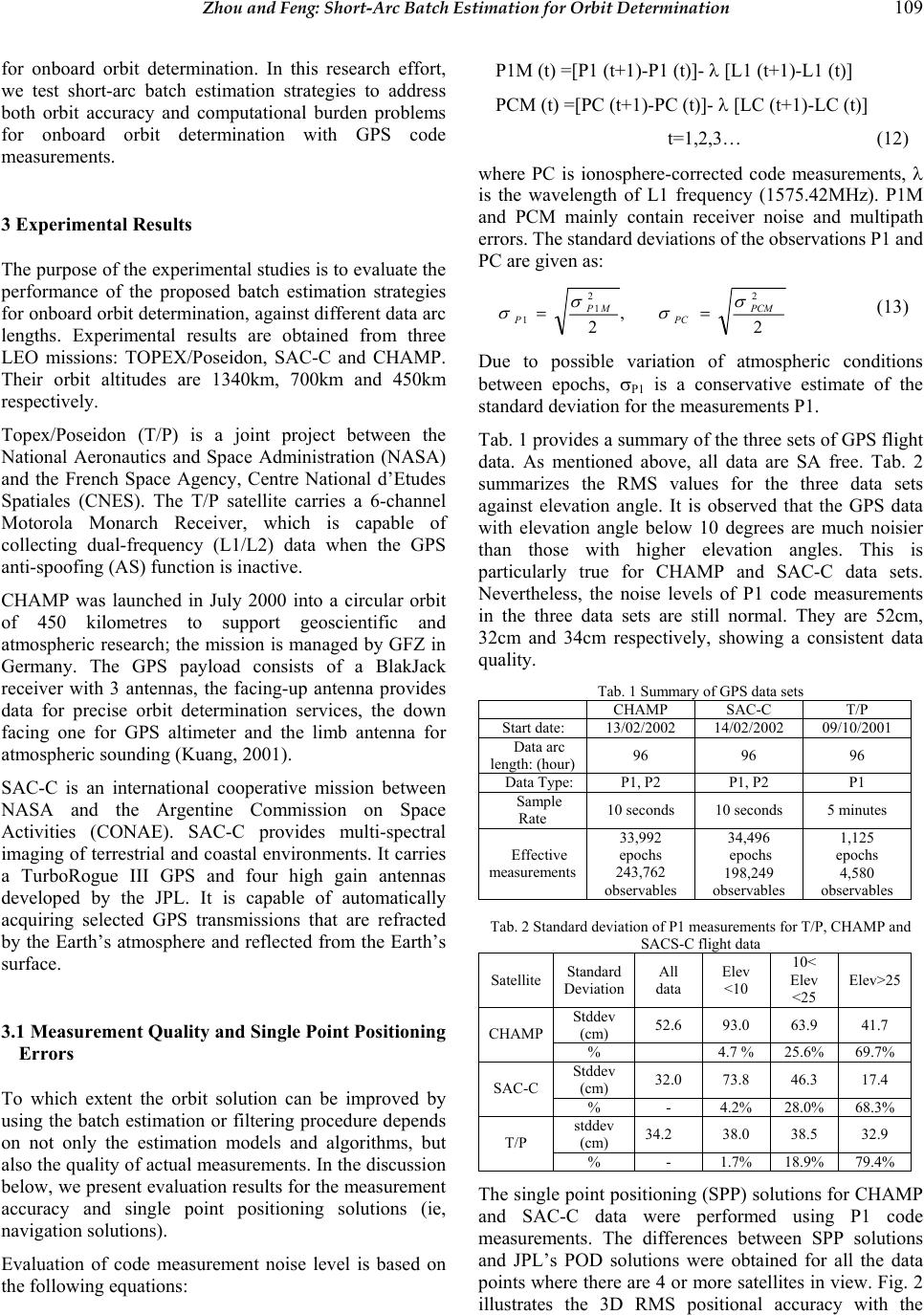 Zhou and Feng: Short-Arc Batch Estimation for Orbit Determination 109 for onboard orbit determination. In this research effort, we test short-arc batch estimation strategies to address both orbit accuracy and computational burden problems for onboard orbit determination with GPS code measurements. P1M (t) =[P1 (t+1)-P1 (t)]- λ [L1 (t+1)-L1 (t)] PCM (t) =[PC (t+1)-PC (t)]- λ [LC (t+1)-LC (t)] t=1,2,3… (12) where PC is ionosphere-corrected code measurements, λ is the wavelength of L1 frequency (1575.42MHz). P1M and PCM mainly contain receiver noise and multipath errors. The standard deviations of the observations P1 and PC are given as: 3 Experimental Results The purpose of the experimental studies is to evaluate the performance of the proposed batch estimation strategies for onboard orbit determination, against different data arc lengths. Experimental results are obtained from three LEO missions: TOPEX/Poseidon, SAC-C and CHAMP. Their orbit altitudes are 1340km, 700km and 450km respectively. 2 , 2 2 2 1 1 PCM PC MP P σ σ σ σ == (13) Due to possible variation of atmospheric conditions between epochs, σP1 is a conservative estimate of the standard deviation for the measurements P1. Topex/Poseidon (T/P) is a joint project between the National Aeronautics and Space Administration (NASA) and the French Space Agency, Centre National d’Etudes Spatiales (CNES). The T/P satellite carries a 6-channel Motorola Monarch Receiver, which is capable of collecting dual-frequency (L1/L2) data when the GPS anti-spoofing (AS) function is inactive. Tab. 1 provides a summary of the three sets of GPS flight data. As mentioned above, all data are SA free. Tab. 2 summarizes the RMS values for the three data sets against elevation angle. It is observed that the GPS data with elevation angle below 10 degrees are much noisier than those with higher elevation angles. This is particularly true for CHAMP and SAC-C data sets. Nevertheless, the noise levels of P1 code measurements in the three data sets are still normal. They are 52cm, 32cm and 34cm respectively, showing a consistent data quality. CHAMP was launched in July 2000 into a circular orbit of 450 kilometres to support geoscientific and atmospheric research; the mission is managed by GFZ in Germany. The GPS payload consists of a BlakJack receiver with 3 antennas, the facing-up antenna provides data for precise orbit determination services, the down facing one for GPS altimeter and the limb antenna for atmospheric sounding (Kuang, 2001). Tab. 1 Summary of GPS data sets CHAMP SAC-C T/P Start date: 13/02/2002 14/02/2002 09/10/2001 Data arc length: (hour) 96 96 96 Data Type: P1, P2 P1, P2 P1 Sample Rate 10 seconds 10 seconds 5 minutes Effective measurements 33,992 epochs 243,762 observables 34,496 epochs 198,249 observables 1,125 epochs 4,580 observables SAC-C is an international cooperative mission between NASA and the Argentine Commission on Space Activities (CONAE). SAC-C provides multi-spectral imaging of terrestrial and coastal environments. It carries a TurboRogue III GPS and four high gain antennas developed by the JPL. It is capable of automatically acquiring selected GPS transmissions that are refracted by the Earth’s atmosphere and reflected from the Earth’s surface. Tab. 2 Standard deviation of P1 measurements for T/P, CHAMP and SACS-C flight data Satellite Standard Deviation All data Elev <10 10< Elev <25 Elev>25 Stddev (cm) 52.6 93.0 63.9 41.7 CHAMP % 4.7 % 25.6% 69.7% Stddev (cm) 32.0 73.8 46.3 17.4 SAC-C % - 4.2% 28.0% 68.3% stddev (cm) 34.2 38.0 38.5 32.9 T/P % - 1.7% 18.9% 79.4% 3.1 Measurement Quality and Single Point Positioning Errors To which extent the orbit solution can be improved by using the batch estimation or filtering procedure depends on not only the estimation models and algorithms, but also the quality of actual measurements. In the discussion below, we present evaluation results for the measurement accuracy and single point positioning solutions (ie, navigation solutions). The single point positioning (SPP) solutions for CHAMP and SAC-C data were performed using P1 code measurements. The differences between SPP solutions and JPL’s POD solutions were obtained for all the data points where there are 4 or more satellites in view. Fig. 2 illustrates the 3D RMS positional accuracy with the Evaluation of code measurement noise level is based on the following equations: 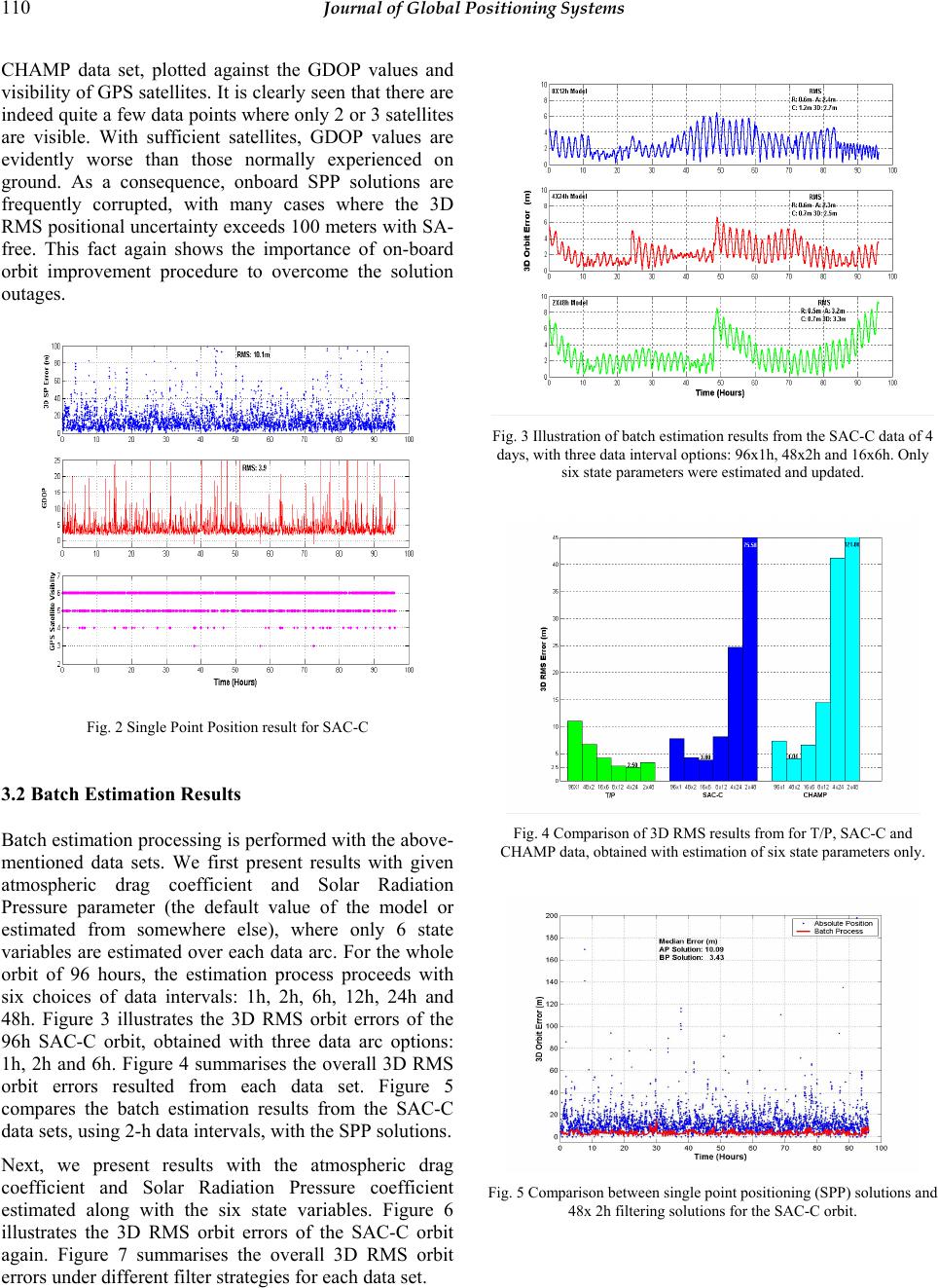 110 Journal of Global Positioning Systems CHAMP data set, plotted against the GDOP values and visibility of GPS satellites. It is clearly seen that there are indeed quite a few data points where only 2 or 3 satellites are visible. With sufficient satellites, GDOP values are evidently worse than those normally experienced on ground. As a consequence, onboard SPP solutions are frequently corrupted, with many cases where the 3D RMS positional uncertainty exceeds 100 meters with SA- free. This fact again shows the importance of on-board orbit improvement procedure to overcome the solution outages. Fig. 3 Illustration of batch estimation results from the SAC-C data of 4 days, with three data interval options: 96x1h, 48x2h and 16x6h. Only six state parameters were estimated and updated. Fig. 2 Single Point Position result for SAC-C 3.2 Batch Estimation Results Fig. 4 Comparison of 3D RMS results from for T/P, SAC-C and CHAMP data, obtained with estimation of six state parameters only. Batch estimation processing is performed with the above- mentioned data sets. We first present results with given atmospheric drag coefficient and Solar Radiation Pressure parameter (the default value of the model or estimated from somewhere else), where only 6 state variables are estimated over each data arc. For the whole orbit of 96 hours, the estimation process proceeds with six choices of data intervals: 1h, 2h, 6h, 12h, 24h and 48h. Figure 3 illustrates the 3D RMS orbit errors of the 96h SAC-C orbit, obtained with three data arc options: 1h, 2h and 6h. Figure 4 summarises the overall 3D RMS orbit errors resulted from each data set. Figure 5 compares the batch estimation results from the SAC-C data sets, using 2-h data intervals, with the SPP solutions. Next, we present results with the atmospheric drag coefficient and Solar Radiation Pressure coefficient estimated along with the six state variables. Figure 6 illustrates the 3D RMS orbit errors of the SAC-C orbit again. Figure 7 summarises the overall 3D RMS orbit errors under different filter strategies for each data set. Fig. 5 Comparison between single point positioning (SPP) solutions and 48x 2h filtering solutions for the SAC-C orbit. 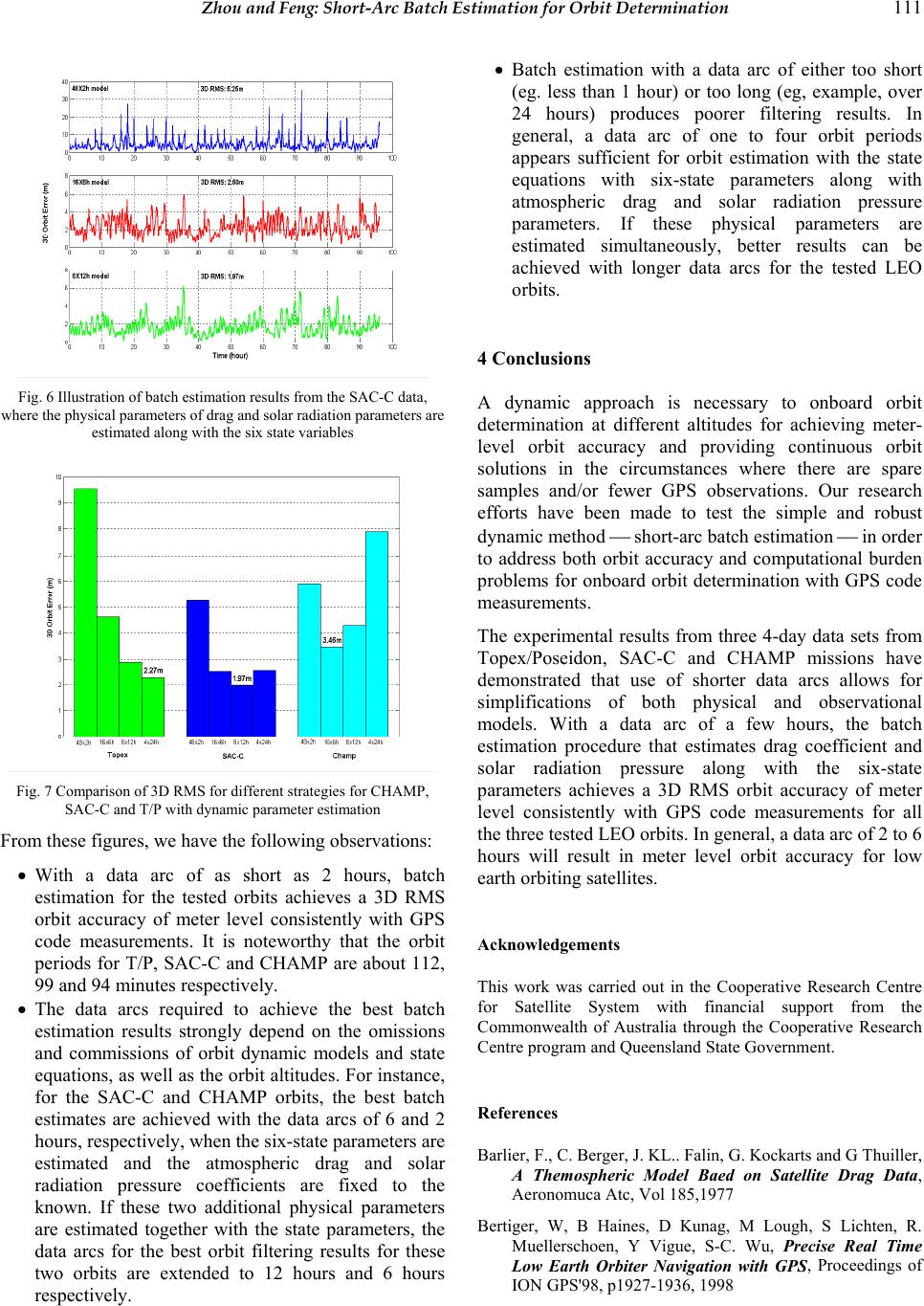 Zhou and Feng: Short-Arc Batch Estimation for Orbit Determination 111 • Batch estimation with a data arc of either too short (eg. less than 1 hour) or too long (eg, example, over 24 hours) produces poorer filtering results. In general, a data arc of one to four orbit periods appears sufficient for orbit estimation with the state equations with six-state parameters along with atmospheric drag and solar radiation pressure parameters. If these physical parameters are estimated simultaneously, better results can be achieved with longer data arcs for the tested LEO orbits. 4 Conclusions Fig. 6 Illustration of batch estimation results from the SAC-C data, where the physical parameters of drag and solar radiation parameters are estimated along with the six state variables A dynamic approach is necessary to onboard orbit determination at different altitudes for achieving meter- level orbit accuracy and providing continuous orbit solutions in the circumstances where there are spare samples and/or fewer GPS observations. Our research efforts have been made to test the simple and robust dynamic method short-arc batch estimation in order to address both orbit accuracy and computational burden problems for onboard orbit determination with GPS code measurements. The experimental results from three 4-day data sets from Topex/Poseidon, SAC-C and CHAMP missions have demonstrated that use of shorter data arcs allows for simplifications of both physical and observational models. With a data arc of a few hours, the batch estimation procedure that estimates drag coefficient and solar radiation pressure along with the six-state parameters achieves a 3D RMS orbit accuracy of meter level consistently with GPS code measurements for all the three tested LEO orbits. In general, a data arc of 2 to 6 hours will result in meter level orbit accuracy for low earth orbiting satellites. Fig. 7 Comparison of 3D RMS for different strategies for CHAMP, SAC-C and T/P with dynamic parameter estimation From these figures, we have the following observations: • With a data arc of as short as 2 hours, batch estimation for the tested orbits achieves a 3D RMS orbit accuracy of meter level consistently with GPS code measurements. It is noteworthy that the orbit periods for T/P, SAC-C and CHAMP are about 112, 99 and 94 minutes respectively. Acknowledgements This work was carried out in the Cooperative Research Centre for Satellite System with financial support from the Commonwealth of Australia through the Cooperative Research Centre program and Queensland State Government. • The data arcs required to achieve the best batch estimation results strongly depend on the omissions and commissions of orbit dynamic models and state equations, as well as the orbit altitudes. For instance, for the SAC-C and CHAMP orbits, the best batch estimates are achieved with the data arcs of 6 and 2 hours, respectively, when the six-state parameters are estimated and the atmospheric drag and solar radiation pressure coefficients are fixed to the known. If these two additional physical parameters are estimated together with the state parameters, the data arcs for the best orbit filtering results for these two orbits are extended to 12 hours and 6 hours respectively. References Barlier, F., C. Berger, J. KL.. Falin, G. Kockarts and G Thuiller, A Themospheric Model Baed on Satellite Drag Data, Aeronomuca Atc, Vol 185,1977 Bertiger, W, B Haines, D Kunag, M Lough, S Lichten, R. Muellerschoen, Y Vigue, S-C. Wu, Precise Real Time Low Earth Orbiter Navigation with GPS, Proceedings of ION GPS'98, p1927-1936, 1998 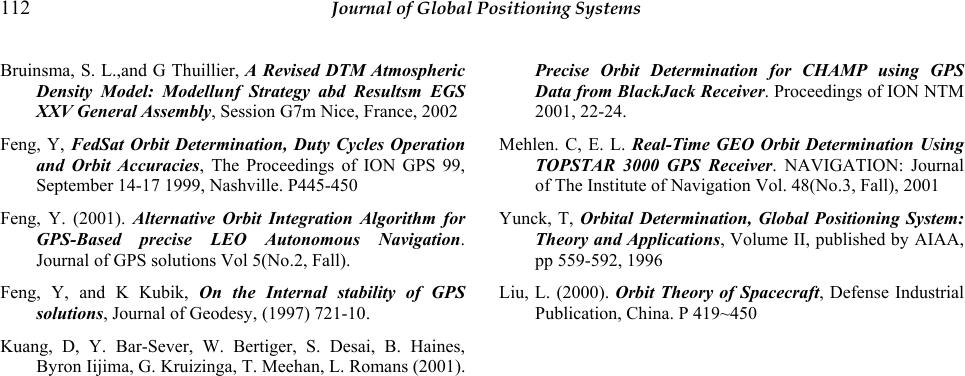 112 Journal of Global Positioning Systems Bruinsma, S. L.,and G Thuillier, A Revised DTM Atmospheric Density Model: Modellunf Strategy abd Resultsm EGS XXV General Assembly, Session G7m Nice, France, 2002 Feng, Y, FedSat Orbit Determination, Duty Cycles Operation and Orbit Accuracies, The Proceedings of ION GPS 99, September 14-17 1999, Nashville. P445-450 Feng, Y. (2001). Alternative Orbit Integration Algorithm for GPS-Based precise LEO Autonomous Navigation. Journal of GPS solutions Vol 5(No.2, Fall). Feng, Y, and K Kubik, On the Internal stability of GPS solutions, Journal of Geodesy, (1997) 721-10. Kuang, D, Y. Bar-Sever, W. Bertiger, S. Desai, B. Haines, Byron Iijima, G. Kruizinga, T. Meehan, L. Romans (2001). Precise Orbit Determination for CHAMP using GPS Data from BlackJack Receiver. Proceedings of ION NTM 2001, 22-24. Mehlen. C, E. L. Real-Time GEO Orbit Determination Using TOPSTAR 3000 GPS Receiver. NAVIGATION: Journal of The Institute of Navigation Vol. 48(No.3, Fall), 2001 Yunck, T, Orbital Determination, Global Positioning System: Theory and Applications, Volume II, published by AIAA, pp 559-592, 1996 Liu, L. (2000). Orbit Theory of Spacecraft, Defense Industrial Publication, China. P 419~450
|