 Open Journal of Statistics, 2012, 2, 356-367 http://dx.doi.org/10.4236/ojs.2012.23044 Published Online July 2012 (http://www.SciRP.org/journal/ojs) Prediction Based on Generalized Order Statistics from a Mixture of Rayleigh Distributions Using MCMC Algorithm Tahani A. Abushal1, Areej M. Al-Zaydi2 1Department of Mathematics, Umm Al-Qura University, Makkah Al-Mukarramah, KSA 2Department of Mathematics, Taif University, Taif, KSA Email: tabushal@yahoo.com, aree.m.z@hotmail.com Received May 15, 2012; revised June 16, 2012; accepted June 30, 2012 ABSTRACT This article considers the problem in obtaining the maximum likelihood prediction (point and interval) and Bayesian prediction (point and interval) for a future observation from mixture of two Rayleigh (MTR) distributions based on generalized order statistics (GOS). We consider one-sample and two-sample prediction schemes using the Markov chain Monte Carlo (MCMC) algorithm. The conjugate prior is used to carry out the Bayesian analysis. The results are specialized to upper record values. Numerical example is presented in the methods proposed in this paper. Keywords: Mixture Distributions; Rayleigh Distribution; Generalized Order Statistics; Record Values; MCMC 1. Introduction The concept of generalized order statistics GOS was in- troduced by [1] as random variables having certain joint density function, which includes as a special case the joint density functions of many models of ordered ran- dom variables, such as ordinary order statistics, ordinary record values, progressive Type-II censored order statis- tics and sequential order statistics, among others. The GOS have been considered extensively by many authors, some of them are [2-18]. In life testing, reliability and quality control problems, mixed failure populations are sometimes encountered. Mixture distributions comprise a finite or infinite number of components, possibly of different distributional types, that can describe different features of data. In recent years, the finite mixture of life distributions have to be of con- siderable interest in terms of their practical applications in a variety of disciplines such as physics, biology, geology, medicine, engineering and economics, among others. Some of the most important references that discussed dif- ferent types of mixtures of distributions are [19-25]. Let the random variable follows Rayleigh lifetime model, its probability density function (PDF), cumulative distribution function (CDF) and reliability function (RF) are given below: T 0,0,t 0,0,t 2, t Rt e 2,ht te 2 1, t Ht e 2 t (1) (2) (3) Also, the hazard rate function (HRF) 2,tt (4) where ....hR The cumulative distribution function (CDF), denoted by t, of a finite mixture of k components, denoted by ,1,, j tj k 1 , k jj j is given by tpHt 1, ,jk (5) where, for 0p 1. kp the mixing proportions j and 1j j 2k p1pp The case of , in (5), is practical importance and so, we shall restrict our study to this case. In such case, the population consist of two sub-popula- tions, mixed with proportions 1 and 21 . In this paper, the components are assumed to be Rayleigh distribution whose PDF, CDF, RF and HRF are given, respectively, by 112 2 htph tpht (6) 112 2, tpHtpHt (7) 112 2,RtpR tpRt (8) ,thtRt 1, 2j (9) where, for , the mixing proportions p are such C opyright © 2012 SciRes. OJS  T. A. ABUSHAL, A. M. AL-ZAYDI357 01that 12jand, 1ppp ,, j HtRt jj are given from (1)-(3) after using ht instead of . Several authors have predicted future order statistics and records from homogeneous and heterogeneous popu- lations that can be represented by single component dis- tribution and finite mixtures of distributions, respectively. For more details, see [9,10,26]. Recently, a few of authors utilized the GOS’s in Bayes- ian inference. Such authors are [7-9,18]. Bayesian infer- ences based on finite mixture distribution have been dis- cussed by several authors such that: [23,24,27-33]. For Bayesian approach, the performance depends on the form of the prior distribution and the loss function assumed. A wide variety of loss functions have been de- veloped in the literature to describe various types of loss structures. The balanced loss function was suggested by [34]. [35] introduced an extended class of the balanced loss function of the form 0 , ,1 0 ,, L ,, . , (10) where is a suitable positive weight function and is an arbitrary loss function when estimate- ing by . The parameter 0 is a chosen prior estimator of 0 , obtained for instance from the crite- rion of maximum likelihood (ML), least squares or unbi- asedness among others. They give a general Bayesian connection between the case of and 0 ,0, kk r where . 01 ,,mm n Suppose that 1;,, 2;,,;,, ,,, nmk nmkrnm TT T 1,,, r r Rm m 1r tt R 11 11 r are the first (out of ) GOS drawn from the mixture of two Ray- leigh MTR distribution. The likelihood function (LF) is given in [1], for by m 1 1 i m r ri iRt ht , r t 1 1 , . r rii i n i Ck Mi i Rt 1, r irr t ht 1 0, i i niM i p 1 ,, LtC R (11) where , is the parameter space, and tt 1 (12) where and are given, respectively, by (5) and (7). ht The purpose of this paper is to obtained the maximum likelihood prediction (point and interval) and the Bayes prediction (point and interval) in the case of one-sample scheme and two-sample scheme. The point predictors are obtained based on balanced square error loss (BSEL) function and the balanced LINEX (BLINEX) loss func- tion. We used ML to estimate the parameters, and of the MTR distribution based on GOS. The conju- gate prior is assumed to carry out the Bayesian analysis. The results are specialized to the upper record values. The rest of the article is organized as follows. Section 2 deals with the derivation of the maximum likelihood estimators of the involved parameters. Sections 3 and 4, deals with studying the maximum likelihood (point and interval) and the Bayes prediction (point and interval) in the case of one-sample scheme and two-sample scheme. In Section 5, the numerical computations results are presented and the concluding remarks. 2. Maximum Likelihood Estimation (MLE) Substituting (6), (7) in (11), the LF takes the form 1 112 2 1 112 2 1 1 1122. i r m r ii i r ii i rr LtpRt pRt ph tpht pR tpRt (13) Take the logarithm of (13), we have 1 1122 1 112 2 1 1122 ln ln +ln 1ln , r iii i r ii i rrr lLtmpRtpRt ph tpht pR tpRt ,1pppp (14) where 12 p . Differentiating (14) with re- spect to the parameters and and equating to zero gives the following likelihood equations 1** 11 1 1** 1 10, 10, 1, 2 rr iiirr ii r jjiji i j r iji rjr i lmt tt p lptt mt t j 1, 2j (15) where, for 121 2 * 2 * 2 ,, ,, 1 iii i ii ii ji iji ji ji ii ji i j ht htRtRt tt ht Rt ht tRt tt ht Rt tt (16) Copyright © 2012 SciRes. OJS  T. A. ABUSHAL, A. M. AL-ZAYDI 358 p Equations (15) do not yield explicit solutions for and , and have to be solved numerically to obtain the ML estimates of the three parameters. New- ton-Raphson iteration is employed to solve (15). 1, 2j ,,TT n Remark: The parameters of the components are as- sumed to be distinct, so that the mixture is identifiable. For the concept of identifiability of finite mixtures and examples, see [19,36,37]. 3. Prediction in Case of One-Sample Scheme Based on the informative 1; ,,;,,nmk rnmk GOS’s from the MTR distribution, for the remaining unobserved future () components, let ;, , r nmk T, s = r + 1, r + 2, denote the future lifetime of the ,nth component to fail, 1 nr, the maximum Likelihood pre- diction (point (MLPP) and interval (MLPI)), Bayesian prediction (point (BPP) and interval (BPI)) can be ob- tained. The conditional PDF of ;, , snmk TT given that the components that had already failed is ;, ,rrnmk TT 1 * 1 1 1 1 1 1 ln ln 1! ,1, (1) 1! sr sr srr s kk srs 1 1 1 ,1, sr r m rs srs Rt RtRtht m m s sr r k kttRt Rt sr RtRtht m CRt msrC 1m (17) In the case when , substituting (6) and (7) in (17), the conditional PDF takes the form * 1 1 112 211 112 2 1 112 2 ln ln ] sj k ss rr sr ss kt pRt pRtpRt pR tpRt pR tpRt 2 2 112 2,. k rr sssr pRt phh ttt t p 1m (18) And in the case when , substituting (6) and (7) in (17), the conditional PDF takes the form * 21 1 112 2 11 2 112 2 sj s 1 1 22 1 2 1 1 112 2., s r s rr m rr r m ss ssr t t t t ttt (19) In the following, we considered two cases: the first is when the mixing proportion p is known and the second is when the two parameters ktpRtpR pR tpR pR tpR pR tpR ph tph and p are assumed to be unknown. 3.1. Prediction When p Is Known In this section we estimate 1 and 2 , assuming that the mixing proportion, 1 p and 2 p are known. 3. n p r 1.1. Maximum Likelihood Prediction Maximum likelihood predictio can be obtain using (18) and (19) by replacing the shape arametes 1 and 2 by 1 ˆ L and 2 ˆ L which is obtained from (15). 1) Interval prediction The MLPI for any future observation t, s = r + 1, r + 2,, n can be obtained by * 212 ˆˆ ,d ss ML ML kt t * 112 ˆˆ Pr,d ,1, sss ML L v tk tm ,1. M t m v t (20) A 1 100% MLPI (L,U) of the futu observ- tion re a t iby snear s given olving the following two nonli equations P) 2 s tr1, Pr(. 2 s tLtt tUt (21) 2) Point prediction The MLPP for any future observation , t s = +2,,n can be obtained by replacing the shape pa- rameters 1 r + 1, r by ˆ 1 L 2 and 2 and ˆ L which, ob- tained from (15) 112 * 212 ,d ,1, ˆˆ ,d,1 ss s ML ML v ss ML ML v Etkt tm kt tm *ˆˆ ˆsML t . (22) 3.1.2. Bayesian Prediction When the mixing proportion, p is known. Let the para- meters ,1, 2j have a gamma prior distribution with PDF 1 1 π,,, 0. Γ() jj jj jjjjjj j e (23) These are chosen since they are the conjugate priors for the individual parameters. The joint prior density function of 12 , is given by 1 π, 2 1 112 2 21 πππ, j jj j je (24) where 1, 2, 0, ,0. jjj j Copyright © 2012 SciRes. OJS  T. A. ABUSHAL, A. M. AL-ZAYDI359 It then follows, from (13) and (24), that th ven by e joint posterior density function is gi 2 1 1 * 11 1 1122 2 πjj j jj i j j m i tA e R tpR 1 1 11 2 2 1 1 112 2 ] r r i i r ii i rr pt ph tpht pR tpRt (25) where 1πd.ALt 1 (26) The Bayes predictive density functi on can be obtained using (18), (19) and (25) as follow: * 1 * 112 0 d, 1, d, ssj ssj Qtttkt m Qtttkt m 1) Interval prediction iction interval, for the future observation ** 11 0 ** π π1. (27) Bayesian pred ;,,, nmk T 1,2, , rr n can be computed by ap- proximated 1s Qtt using the MCM [17,24], using the form *C algorithm, see 1 * 1 *i s i s 1 , *d s r j i s itktt (28) kt Qtt where is the number of generated parameters and i , i1, 2,3,, . They are generated from the poste- rio) using Gibbs sampler and Me- 1 100% BPI (L, r density function (25 tro A polis-Hastings techniques, for more details see [38]. U) of the future observation t is given byg the following two nonlinear equa- tions solvin * 1 * 1r it d 1, 2 d i sjs iL i sjs kt t kt t (29) * 1 * 1 d . 2 d r i sjs iU i sjs it kt t kt t (30) Numerical methods are generally necessary to solve the above two equ gi ations to obtain L and U for a ven . 2) Point prediction a) BPP for the future observation t based on BSEL function can be obtained using 1, s Ett (31) where sB S sML tt ML t is the ML prediction for future obser- vation the t which can be obtained using (22) and s Ett can be obtained using * Qd. 1 r sss t b) BPP for the future observation Etttttt (32) tBLINX loss functio based on n can be obtained using 1ln 1, sML s at at sBL te et a E (33) where ML t is the ML prediction for the vation future obser- t which can be obtained using (22) and t c s at Ee an be obtained using * 1d. s r at s at s teQ ttt (34) 3.2. Prediction When p and θj Are Unknown We Ee t hen both of the two parameters thmixing proportion p and ,1,2 jj , are assumed to be unknown. 3.2.1. Maximum Likelihood Prediction Maximum likelihood prediction can be obtain using (18) ) byand (19 replacing the parameters p, 1 and 2 by 1 ˆ , ˆ LML p and 2 ˆ L which we obtained using (15). 1) Interval prediction The MLPI for any future observation , t1, rr 2,, n can be obtained by * 212 ˆˆ ˆ,, d,1. v ss ML ML ML vktp tm * 112 ˆˆ ˆ Pr,,d , ss s ML MLML tt ktptm 1, (35) A 1 100% MLPI (L,U) of the future observa- tion t is given by solving the following two nonliner Equations (1). 2) Piction a 2 oint pred e observation , The MLPP for any futur t 1, rr 2,,n can be obtained by replacing p, 1 the shape pa- rameters and 2 by ˆ , ˆ 1 LML and 2 ˆ p L which, obtained from (15). * 112 * 212 ˆˆ ˆˆ,,d, 1, ˆˆ ˆ,, d,1. sss s sMLML MLML t ss s ML MLML t tEttktp tm tkt ptm (36) 3.2.2. Bayesian Prediction Let p and ,1,2j j , are independent random vari- ab ,Betabb and for1, 2, les such that 12 ~pj to foon ith PDF llow an inverted gamma prior distributiw Copyright © 2012 SciRes. OJS  T. A. ABUSHAL, A. M. AL-ZAYDI 360 ,, , jj (37) A joint prio 1 10. Γ j jj jj j jjj j j pe r density function of 12 ,,p is then given by 2 1 32 1 π, , j 12 121 11 1 2 2 πππ π1 j jj e 1,p bb j p pp j 1 (38) wher 12 1 0p p and for 1,20, j j e ,, 0. jjj b Using the likelihood function (13) and the prior density function (38), the posterior density function will be in the form * 2 1 1 112 2 1 112 21122 1 π, i j j m r ii i r iir r i pt e pR tpRt ph tphtpR tpRt 9) 1, r 2 1 12 1 11 21 2 2 jj j jj bb Ap p (3 where 1 2πd.ALt (40) The Bayes prediction density function of TT ,, ,snmk can be obtained, ssee [39], by 1 0 * 2 ** 21 0 ** 1 22 π,, π,, s sj sj Qtt ptkt p ptkt p 0 0 dd,1, dd,1. p m p m (41 1) Interval prediction ction interval, for the future observ ) ation Bayesian predi ;,,, nmk T 1,2, , rr n can be computed by ap- proximated s Qtt using the MCMC algorithm, see [24], using the form * 2 * 1 * , , ,d ii sj i ii * 2 1r s js it Qt t (42) 1,2,3,, kt p kt p t where ,, ii jpi are generated from the ing Gibbs sampler an 1 100% BPI (L,U) pos- d Me- terior density f tropolis-Hastin of the futu unction (39) us gs techniques. A re observation t is given by solving the fol- s lowationing two nonlinear equ * * ,d 1, 2 ,d ii sj s ii sj s ktp t tp t 1 1 r iL i tk , (43) * k 1 1* ,d , 2 ,d r ii sj s iU iii sj s t tp t ktp t (44) Numerical methods are generally necessary to solve ve two equations the aboto obtain L and U for a given . 1) Point prediction BPP for the future observation t based on BSEL function can be obtained using 1, s sBSsML tt Ett (45) where ML t is the ML prediction for the vation future obser- t which can be obtained using (36) and s Ett can be obtained using * 2 Qd r. ss t Etttttt 2) BPP for the future observation s (46) t based on BLINX loss function can be obtained using 1, sML s lnne Eet 1at at s t BLa (47) w here ML t is the ML prediction fr the future obser- vation o t which can be obtained using (36) and s Ee t can be obtained using at * ss at at 2.d r s t EeteQttt (48) 4. Prediction in Ca se of Two-Sample Scheme Based on the informative 1;,,2;,, , nmknmk TT ;,, ,, r nmk T drawn GOS from the MTR distribution and let 1 YY , where ;,, ,1,2,,,0, 0 iiNMK YYiNM K be a se- cond independent generalized ordered random sample (of size N) of future observations from the sam tribution. We want to predict any future (unob b Y e dis- served) GOS ;,, ,1,2,,, bNMK Yb N in the future sample of size . The PDF of ,1 b YbN given the vector of paramters N e , is: * 11 1 0,1, b b jM bb bbjb j Gy Ry hyRyM 11 [ln , 1, Kb bb b Ry RyhyM (49) j where 1 1j b j b and 1jM jKN Substituting from (6) and (7) in (49), we have: * 1 112222 1 11 0 b bb bb bb jb j Gy p yphy pR y 1 11 1 2 2,1, b jM b RypRy ph pR yM (50) Copyright © 2012 SciRes. OJS  T. A. ABUSHAL, A. M. AL-ZAYDI361 * 2 1 112211 1 ln , b K bb b Gy pRypRy ph pR ypRyM 22 11221, bb bb yphy ediction When nown 4. Maximum likelihood prediction in using (50) by replacing the shparam1 (51) 4.1. PrP Is K 1.1. Maximum Likelihood Prediction ca ape n be obta eters and (51) and 2 by 1 ˆ L and 2 ˆ L 1) Interval prediction The MLPI for any futu,1 b ybN re observation can be obtained by * 112 * 212 ˆˆ Pr , ˆˆ sb ML ML v ML ML v tGy Gy td ,1, ,d,1. b bb yM yM 1100% MLPI (L,U) of the future observa- is given by solving the following two nonlinear (52) A tion yb equations Pr1, PryLt yUt 22 bb t he Mr anyutuvatiob can be ob- t sram1 t (53) 2) Point prediction TLPP fo fre o hap bser e pa ny eters ained by replacing the and 2 by 1 ˆ L and 2 ˆ L 212 ,d ,1. bb ML ML yy M 4.1.2. Baye * 112 0 * 0 ˆˆ ,d ,1, ˆˆ b bML bb b ML ML b yG yy M yG sian Predi The predictive dens,1 b YbN is given by: ˆ yEyt (54) ction ity function of * 1 πd, 0, b b y ty (55) ** 0 b yG t where for 1 and 1m 2 1 * ** 1 0 21 1 112 2 11 1 112 21122 1 11 22 1 1122 0 πd d. i jj jj r b b m r jii ji r iir r i bb jbb tG y epRtpRt ph tphtpR tpRt phyphy 1 11 2 2 b bb p RypRy 1jM bb jpR ypR y yt (56) Also, when 1 and 1m 2 2 1 * 1 0 1 21 1 112 2 11 1 112 21122 1 1 11 2211 22 1 1122 πd ln d. jj jj r b r ji i ji r iir r i b bb b K bb yt tG y epRtpRt ph tphtpR tpRt pRypRy phyphy pR ypRy b 2 ** b (57) 1) Interval prediction ction ifor the future observation b Y Bayesian predinterval, ,1 bN , compcan beuted using (56) and (57) which can be approximated using MCMC algorithm by the form * 1 * * 10d i bj i bi bj b i Gy yt Gy y (58) where ,1,2,3,, i ji are generated from the post- erior density function (25) using Gibbs sampler and Metropolis-Hastings techniques. A 1 100% BPI (L,U) of the future observation b y is given by solving the following two nonl equatio inear ns * 1 1* 0 d 1, 2 d i bj b iL ii bj b Gy y Gy y , (59) * 1 1* 0 d , 2 d i bjb iU ii bj b Gy y Gy y (60) Numerical methods such as Newton-Raphson are gen- ecessary to solveerally n the above two nonlinear Equa- tions (59) and (60), to obtain L and U for a given . 2) Pn a) BPP for the future observation b y based on BSEL function ca oint predictio n be obtained using ˆ1, bBS bMLb yy Eyt (61) where ˆbML y is the ML prediction for the future obser- vation b y which can be obtained using (54) and b Eyt can be obtained using * 0d. bbbb Eytyyt y (62) b) BPP for the future observation b y based on BLINX loss function can be obtained using Copyright © 2012 SciRes. OJS  T. A. ABUSHAL, A. M. AL-ZAYDI 362 ˆ 1ln 1, bML b ay ye Eet (63) bB L ay w ing a here ˆbML y is the ML prediction for the future obser- vation b y which can be obtained us (54) and b ay Ee t can be obtained using *.d bb ay ay Eeteyty (64) 4.2.1. Maximum Likelihood Prediction Maximum likelihood prediction can be o and (51) by replacing thete, 0bb 4.2. Prediction When p and θi Are Unknown btain using (50) e paramrs p1 and 2 by 1 ˆ , ˆ LML p and 2 ˆ L 1) Interval prediction The maximum likelihood Interval prediction (MLIP) for any futu,1 b ybN can be by re observation obtained 212 1, ˆd,1. b ML ML ML vp yM va- ear * 112 * ˆˆˆ Pr,,d , ˆˆ ,, sb b MLML ML v tGy pyM Gy t b (65) A 1100% MLPI (L,U) of the future obser tion b y is given by solving the following two nonlin equations Pr1, Pr 22 bb yLtt yUtt (6) 6 2) Point prediction The MLPP for any future observation ,1 b ybN can be obtained by replacing the parameters p, 1 and 2 by ˆ , ˆ 1 LML 2 ˆ p and L * 112 0 * 212 ˆ ˆˆˆ ,, ˆˆ ˆ ,, bML ML ML ML ML ML v b b bML y Gy p Eyt y yG yp d, 1, d, 1. bb bb yM y M (67) . B tive density ,1 b ybN is given by: 4.2.2ayesian Prediction The predicfunction of 1 ** 2 * ,πdd ,0 b b yGyp py tt (68) 00 b where for 1 and 1m 11 1 *** 2 πyGy 00 ,dd. bb p p tt (69) hen Also, w 1 and 1m * 2 πdd .p p 22 1 ** 00 , bb yGy tt (70) 1) Interval prediction Bayesian prediction interval, for the future observation ,1 b ybN , can be computed using (69) and which can be approximated using MCMC algorithm by the form (70) *, , ii bj ii jb Gyp dy (71) e ,,1,2,, ii j pi 1 * i b yt 10b iGy p wher are generated from the pos- terior density function (39) using Gibbs sampler and Me- tropolis-Hastings techniques. A 100% (L,U) o the future observation en by the flowing two nonlinear equations 1 BPI f b y is givsolving ol * 1 1* 0 ,d 1, 2 ii bjb iL ii bjb Gyp y G y ,d i y p (72) * 1,d , 2 ,d ii bjb iU ii Gypy yp y 1* iG 0bj b (73) Numerical methods such as Newton-Raphson are nec- essary to solve the above two nonlinear equations (72) and (73), to obtain L and U for a given . 2) Point prediction a) BPP for the future observation b y ba function can be obtained using sed on BSEL 1, Lb Eyt (74) where ˆbML y is the ML prediction for the future obser- vany ich ca ˆ bBS bM yy bwh tio n be obtained using (67) and b yt E 0d. bbbb Eytyyt y (75) 2) BPP for the future observation b y base loss function can be obtained using d on BLINX ˆ 1ln 1 bML bBL ay ye Ee a , b ay t (76) where ˆbML y is the ML prediction for the future obser- vation b y which can be obtained using (67) and b ay Ee t can be obtained using 0d. bb ay bb Ee teyy (77) ayt 5. Simulation Procedure In this subsection we will consider the upper record val- ich cues whan be obtained from the GOS by taking 1, 1mk and 1 r . In this section, we will nt a com- pute poind interval predictors of future upper record Copyright © 2012 SciRes. OJS 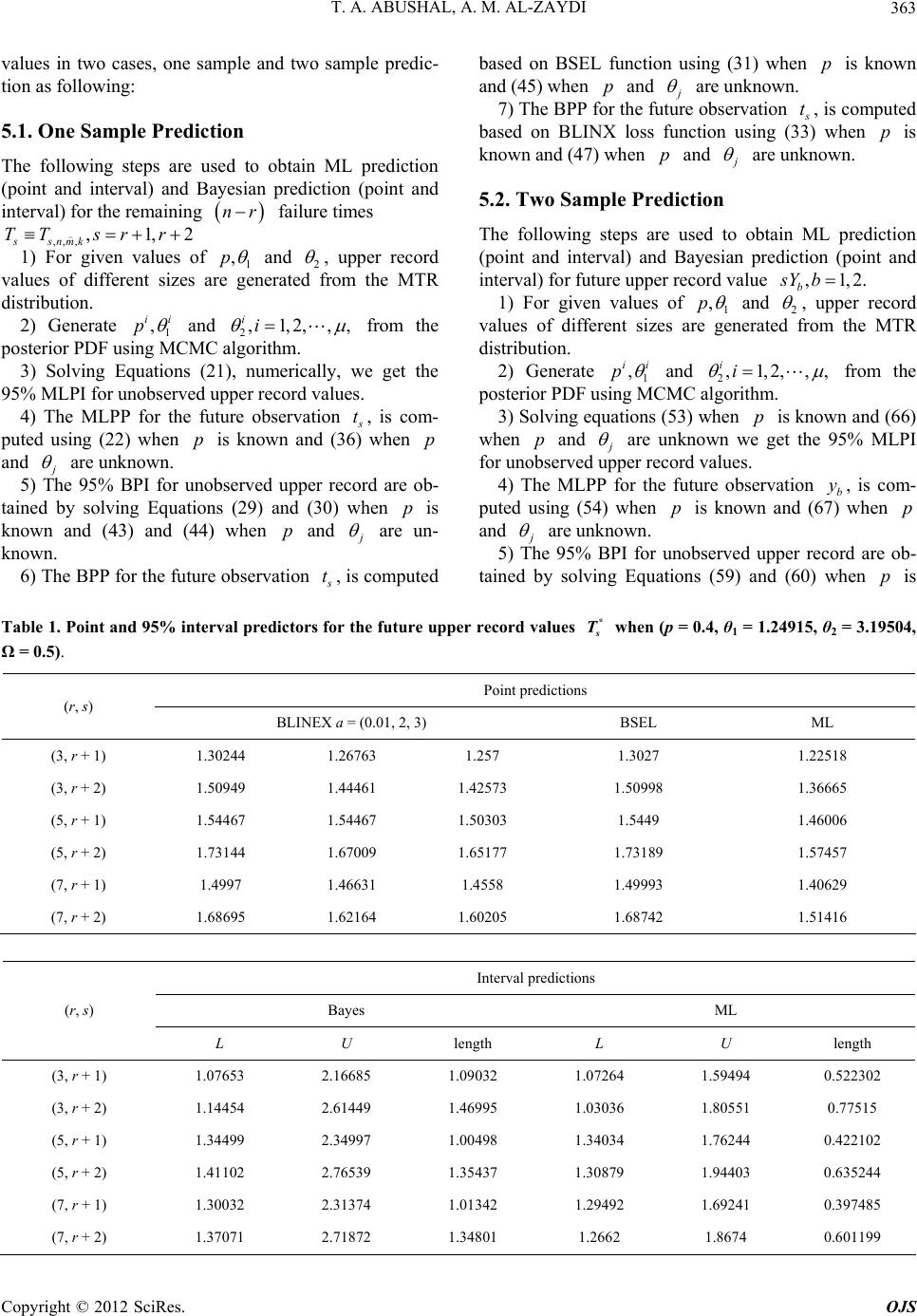 T. A. ABUSHAL, A. M. AL-ZAYDI Copyright © 2012 SciRes. OJS 363 values in two cases, one sample and two tion as following: The fos are used to obtain ML prediction nd Bayesian prediction (poi inin nr sample predic- 5.1. One Sample Prediction llowing step nterval) a r the rema (point and i interval) fo nt and g failure times ,nmk r ,, 1,2 ss TTr r 1) Fogiven values of 1 ,p ,s and 2 , upper record val rated from the MTR din. rate 1 ues of stributio 2) Gene different sizes are gene , ii p and i 2,1,2,,i from the posterior PDF using MCMC algorithm. merically, we get the recordues. 3) Solving Equations (21), 95% MLPI for unobserved uppe nu r val 4) The MLPP for the future observation t, is com- puted using (22) when p is known and (36) when p and are . unknown 5) The 95% BPI for unobserved upper record are ob- tained by solving Equations (29) and (30) when p is known and (43) and (44) when p and are un- known. 6) The BPP for the future observation t, is computed based on BSEL function using (31) when p is known and (45) when p and are unknown. 7) The BPP for the future observation t, is computed based on BLINX loss function using (33) when p knowand (47) when pis n and are unknown. t p ti 5.2. Two Sample Prediction The following steps are used to obain MLrediction (point and interval) and Bayesian predicon (point and interval) for future upper record value ,1,2. b sYb 1) For given values of 1 ,p and 2 , upper record vafrolues of different sizes are generated m the MTR distribution. 2) Generate 1 , ii p and 2,1,2,, ii fromthe posterior PDF using MC algthm. CM ori p is known and (66) 3) Solving equations (53) when when p and are unknown we get the 95% MLPI nd (67) whn p an for unobserved upper record values. 4) The MLPP for the future observation b y, is com- puted using (54) when p is known ae d are unknown. 5) The 95% BPI for unobserved upper record are ob- tained by solving Equations (59) and (60) when p is er 915, θ = 3.19504, record values * T when (p = 0.4, θ = 1.24Table 1. Point and 95% interval predictors for the future upp Ω = 0.5). s1 2 Point predictions (r, s) BLINEX a = (0.01, 2, 3) BSEL ML (3, r + 1) 1.30244 1.26763 1.1.22518 257 1.3027 (3, r + 2) 1.50949 461 1.441.4257 (5, r + 154467 1.54467 1.5030 + 1) 1.46631 1.4558 1.49993 1.40629 (7, r + 2) 1.68695 1.62164 1.61.68742 1.51416 3 1.50998 1.36665 3 1.5449 1.46006 ) 1. (5, r + 2) 1.73144 1.67009 1.65177 1.73189 1.57457 (7, r 1.4997 0205 Interval predictions Bayes ML (r, s) L U length L U th leng (3, r + 1) 1.07653 2.16685 11.07261.59494 302 .09032 4 0.522 (3, r + 2) 1.14454 2.61449 11.03031.80551 515 11.34031.76244 102 (5, r + 2) 1.41102 2.76539 1.7 1.30879 1.94403 0.635244 (7 ) 1.30032 2.31374 1.0192 1.69241 0.397485 (7, r + 2) 1.37071 1.34801 1.2662 1. 0.601199 .46995 6 0.77 (5, r + 1) 1.34499 2.34997 .00498 4 0.422 3543 , r + 1342 1.294 2.71872 8674  T. A. ABUSHAL, A. M. AL-ZAYDI 364 Table 2. Point and 95% interedictors fohe future up values when (p = 0.391789, θ1 = 0.307317, θ2 = 3.33166, 5). t predictio rval pr tper record* s T Ω = 0. Poinns (r, s) BLINE 2, 3) EL MX a = (0.01,BSL (3 7 2.2174, r + 1) 2.322 2.23435 2.21354 2.32287 (3, 2) 2.68054 2.52154 2.48465 2.68226 2.4958 (5, 1) 2.81243 2.74901 2.73223 2.813 2.74014 2.66724 2.62719 2.61879 2.6678 2.62507 (7, r + 2) 2.8745 2.79894 2.72.87574 2.79966 r + r + (5, r + 2) 3.13233 3.01438 2.98352 3.13346 3.00112 (7, r + 1) 8385 Interval predictions Bayes ML (r, s) L U lL U gth ength len (3, r + 1) 1.91839 421.91487 2.94288 01 .03255 .11416 1.028 (3, r + 2) 1.80949 53.1.82973.35066 09 412.46333.42614 751 522.53063.82785 24 (7, r + 1) 2.44491 3.71097 1.26605 2.44436 3.08759 0.643231 (7, r + 2) 2.39459 4.67043 2.27746 3.37074 0.97328 .02409 2146 7 1.52 (5, r + 1) 2.46589 .17173 .70584 9 0.962 (5, r + 2) 2.54923 .01563 .46641 1 1.297 584 2.39 Table 3. Point and 95% interval predictors foe future upprd values Y b = 1, 2 when ( 0.4, θ1 = 1.22 = 3.1950 5). int predictio r ther reco* b, p =4915, θ 4, Ω = 0. Pons (r, b) B0.01, 2, BSELINEX a = (3) L ML (3.1) 0.669076 0084 0.552831 0.6690.58789 0.55108 (3.2) 1.06708 0272 0.901294 1.068 9 1745 0.554524 0.6680. (5.2) 1.05059 0.926826 0.888678 1.05157 0.879144 (7.2) 0.999761 0.874356 0.838862 1.00077 0.790802 0.9414 0.905675 (5.1) 0.667370.58033 557414 (7.1) 0.637403 0.552511 0.526817 0.638057 0.506104 Interval predictions BayL es M (r, b) L Ulength (CP L ) ) Ulength (CP (3.1) 0.2.031.91158 (96.0.0850494 166 1. 123947 553 16) 1.4738661 (97.70) (3.2) 0.2.702.32429 (94.0.267226 068 1. 0.1.971.85479 (95.0.0926795 062 1. 0.2.582.20882 (94.0.289275 782 1. (7.1) 0.122419 1.93781 1.81539 (96.01) 0.0854495 1.20807 1.12263 (95.03) 0.376222 2.51787 2.14165284 1.55638 1.2901 (95.43) 37762 191 97) 1.963957 (98.54) (5.1) 122991 778 90) 1.3626794 (96.50) (5.2) 377125 594 75) 1.7546854 (97.63) (7.2) (94.49) 0.266 Copyright © 2012 SciRes. OJS 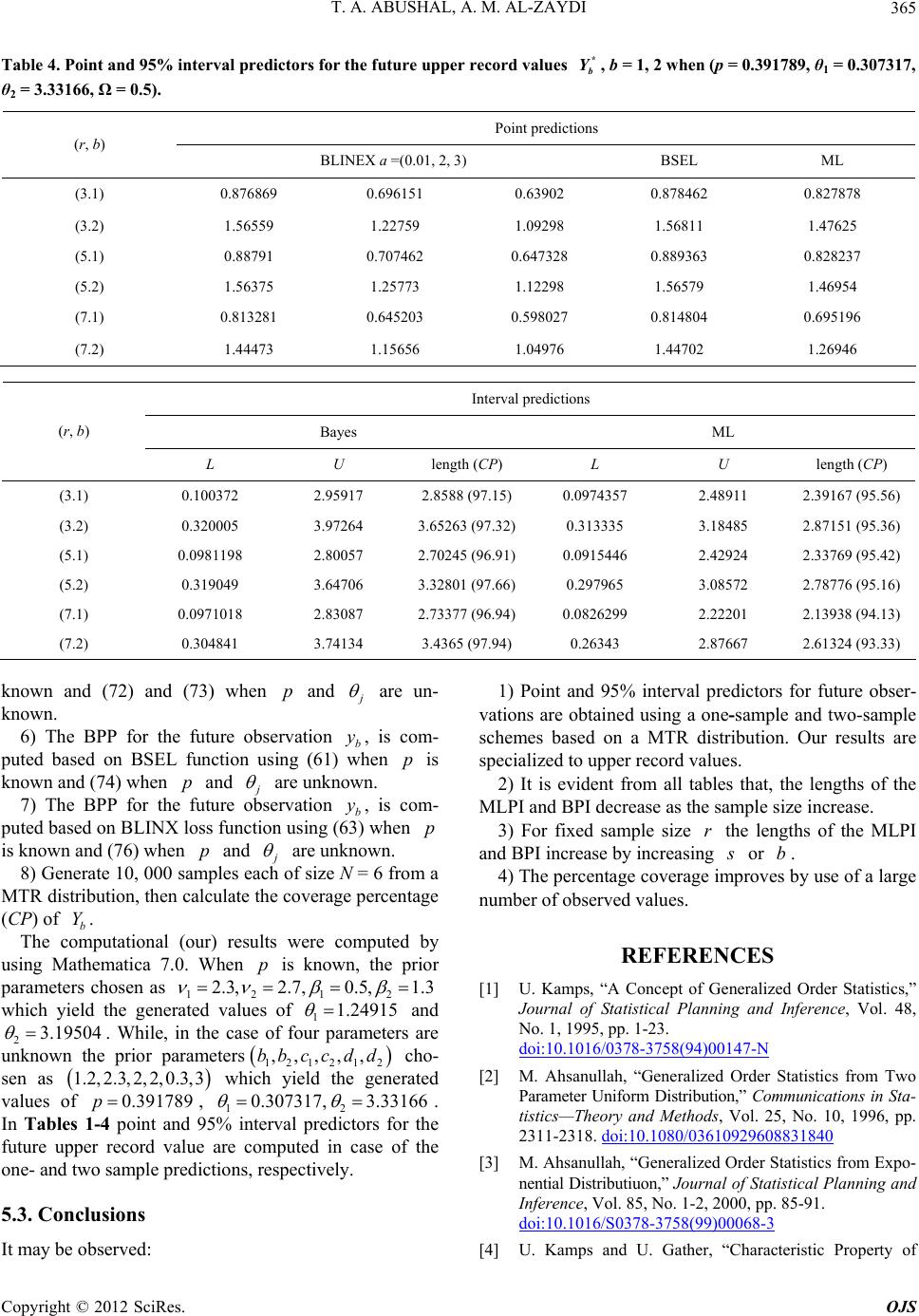 T. A. ABUSHAL, A. M. AL-ZAYDI Copyright © 2012 SciRes. OJS 365 Table 4. Point and 95% interval predictors future upper record values * b Y, b = 1, 2 when (.391789, θ1 = 0.307317, θ2 = 3.33166, Ω = 0.5). predi for thep = 0 Pointctions (r, b) a =(0.BSEL BLINEX 01, 2, 3) ML (3.1) 869 696151 63902 0.878460.8760.0.2 0.827878 (3.2) 559 22759 09298 1.5681 ) 0.1 707462 647328 0.889363 ) 375 25773 12298 1.5657 (7.2) 1.44473 1.15656 1.04976 1.44702 1.26946 1.561.1.1 1.47625 (5.188790.0.0.828237 (5.21.561.1.9 1.46954 (7.1) 0.813281 0.645203 0.598027 0.814804 0.695196 Interval predictions Bayes ML (r L U length (CP) L U ) , b) length (CP (30.10032.95917 8588 (97.15357 1 5.56) .1) 72 2.) 0.09742.48912.39167 (9 (30.32003.97264 65263 (97.32)313335 5 36) (50.09812.80057 5 (96.91446 4 5.42) (50.31903.64706 32801 (97.66)297965 2 16) (7.1) 0.0971018 2.83087 2.73377 (96.94) 0.0826299 2.22201 2.13938 (94.13) (7.2) 0.304841 3.74134 3.4365 (343 2.87667 2.61324 (93.33) .2) 05 3. 0.3.18482.87151 (95. .1) 198 2.7024) 0.09152.42922.33769 (9 .2) 49 3. 0.3.08572.78776 (95. 97.94) 0.26 known and (72) and73) wh p and (en are un- known. 6) TPP for theeris co puted b onLusi p know 4) he B future obs 1) vatio Point and 95% interval pr for futr- ns are obned using a onsample anle es b MTR ion. e lized record v is evm all tabat, the lengthe nd BPI as thle size increase. r fiple size lengthI PI inincreasi edictors e- ure obse d two-samptai schem ased on adistributOur results ar specia to upperalues. 2) It MLPI a ident fro decrease les th e samp s of th 3) Foxed samr the s of the MLP and Bcrease by ng o vati ng ( on b y, m- ased61) when is BSE when function n and (7p and arunk 7) TPP for thervatis co puted bon BLon usihen is know6) e nown. ion y, he Be future obsb ng (63) w m- ased INX whe loss functi p n and (7n p and arn. 8) Ge 10, 000 sameach of size 6 from TR dtion, then calcue covercentag w m n, e unknow nerate istribu ples late th N = rage pe a e r b. The pee coveraves be number of observed values. CES ps, “A Concep 4) rcentagge improy use of a larg M (CP) of b Y. The computational (our) results ere coputed by using Mathematica 7.0. When p is know the prior parameters chosen as 12 1 2 2.3, 2.7,0.5, 1.3 which yield the generated values of 11.24915 and 23.19504 . While, in the case of four parameters are unknown the prior parameters 1212 1 2 ,,,,, bbcc dd cho- sen as 1.2,2.3, 2, 2,0.3,3 which yield the generat va REFEREN [1] U. Kamt of Generalized Order Statistics,” Journal of Statistical Planning and Inference, Vol. 48, No. 1, 1995, pp. 1-23. doi:10.1016/0378-3758(94)00147-N [2] M. Ahsanullah, “Generalized Order Statistics from Two rm Distribution,” Communications in Sta- nd Methods, Vol. 25, No. 10, 1996, pp. .1080/03610929608831840 ed Parameter Unifo tistics—Theory a lues of 0.391789p, 12 0.307317, 3.33166 . In Tables 1-4 point and 95% interval predictors for the future upper record value are computed in case of the on 2311-2318. doi:10 [3] M. Ahsanullah, “Generalized Order Statistics from Expo- nential Distributiuon,” Journal of Statistical Planning and Inference, Vol. 85, No. 1-2, 2000, pp. 85-91. doi:10.1016/S0378-3758(99)00068-3 [4] U. Kamps and U. Gather, “Cha e- and two sample predictions, respectively. 5.3. Conclusions It may be observed: racteristic Property of  T. A. ABUSHAL, A. M. AL-ZAYDI 366 el for 378-3758(00)00074-4 Generalized Order Statistics for Exponential Distribu- tions,” Applicationes Mathematicae (Warsaw), Vol. 24, No. 4, 1997, pp. 383-391. [5] E. Cramer and U. Kamps, “RationsExpectations of Functions of Generalized Order Statistics,” Journal of Statistical Planning and Inference, Vol. 89, No. 1-2, 2000, pp. 79-89. doi:10.1016/S0 [6] M. Habibullah and M. Ahsanullah, “Estimation of Pa- rameters of a eneralized Order statistics,” Comand Me- Pareto Distribution by G munications in Statistics—Theory thods, Vol. 29, No. 7, 2000, pp. 1597-1609. doi:10.1080/03610920008832567 [7] Z. F. Jaheen, “On Bayesian Prediction o Order Statistics,” Journal of Statisticf General al Theory and Ap- 2005, pp. ized plications, Vol. 1, No. 3, 2002, pp.191-204. [8] Z. F. Jaheen, “Estimation Based on Generalized Order Statistics from the Burr Model,” Communications in Sta- tistics—Theory and Methods, Vol. 34, No. 4, 785-794. doi:10.1081/STA-200054408 [9] E. K. Al-Hussaini and A. A. Ahmad, “On Bayesian Pre- dictive Distributions of Generalized Order Metrika, Vol. 57, No. 2, 2003, pp. 165 Statisti -176. cs,” doi:10.1007/s001840200207 [10] E. K. Al-Hussaini, “Generalized Order Statistics: Prospec- tive and Applications,” Journal of Applied Statistical Sci- ence, Vol. 13, No. 1, 2004, pp. 59-85. s Distribu- ory and Applications, oubly Trun- ents of General- [11] A. A. Ahmad and T. A. Abu-Shal, “Recurrence Relations for Moment Generating Functions of Nonadjacent Gen- eralized Order Statistics Based on a Class of Doubly Truncated Distributions,” Journal of Statistical Theory and Applications, Vol. 6, No. 2, 2007, pp. 174-189. [12] A. A. Ahmad and T. A. Abu-Shal, “Recurrence Relations for Moment Generating Functions of Generalized Order Statistics from Doubly Truncated Continuou tions,” Journal of Statistical The Vol. 6, No. 2, 2008, pp. 243-257. [13] A. A. Ahmad, “Relations for Single and Product Mo- ments of Generalized Order Statistics from D cated Burr type XII Distribution,” Journal of the Egyp- tian Mathematical Society, Vol. 15, No. 1, 2007, pp. 117- 128. [14] A. A. Ahmad, “Single and Product Mom ized Order Statistics from Linear Exponential Distribu- tion,” Communications in Statistics—Theory and Methods, Vol. 37, No. 8, 2008, pp. 1162-1172. doi:10.1080/03610920701713344 [15] Z. A. Aboeleneen, “Inference for Weibull Distribution under Generalized Order Statistics,” Mathematics and Computers in Simulation, Vol. 81, No. 1, 2010, pp. 26-36. doi:10.1016/j.matcom.2010.06.013 [16] S. Abu El Fotouh, “Estimation for the Parameters of the Weibull Extension Model Based on Generalized Order Statistics,” International Journal of Contemporary Mathe- matical Sciencess, Vol. 6, No. 36, 2011, pp. 1749-1760. [17] S. F. Ateya, “Prediction under Generalized Exponential Distribution Using MCMC Algorithm,” International Ma- thematical Forum, Vol. 6, No. 63, 2011, pp. 3111-3119. [18] S. F. Ateya and A. A. Ahmad, “Inferences Based on Gen- eralized Order Statistics under Truncated Type I Gener- alized Logistic Distribution,” Statistics, Vol. 45, No. 4, 2011, pp. 389-402. doi:10.1080/02331881003650149 [19] B. S. Everitt and D. J. Hand, “Finite Mixture Distribu- tions,” Cambridge University Press, Cambridge, 1981. [20] D. M. Titterington, A. F. M. Smith and U. E. Makov, “Sta- titute of Statistical pp. 261-265. tistical Analysis of Finite Mixture Distributions,” John Wiley and Sons, New York, 1985. [21] K. E. Ahmad, “Identifiability of Finite Mixtures Using a New Transform,” Annals of the Ins Mathematics, Vol. 40, No. 2, 1988, doi:10.1007/BF00052342 [22] G. J. McLachlan and K. E. Basford, “Mixture Models: Inferences and Applications to Clustering,” Marcel Dek- ker, New York, 1988. [23] Z. F. Jaheen, “On Record Statistics from a Mixture of Two Exponential Distributions,” Journal of Statistical Computation and Simulation, Vol. 75, No. 1, 2005, pp. 1- 11. doi:10.1080/00949650410001646924 [24] K. E. Ahmad, Z. F. Jaheen and Heba S. Mohammed, “Bayesian Prediction Based on Type-I Censored Data from a Mixture of Burr Type XII Distribution and Its Re- ciprocal,” Statistics, Vol. 1, No. 1, 2011, pp. 1-11. doi:10.1080/02331888.2011.555550 [25] E. K. AL-Hussaini and M. Hussein, “Estimation under a Finite Mixture of Exponentiated Exponential Components Model and Balanced Square Error Loss,” Open Journal of Statistics, Vol. 2, No. 1, 2012, pp. 28-38. doi:10.4236/ojs.2012.21004 [26] M. A. M. Ali-Mousa, “Bayesian Prediction Based on Pareto Doubly Censored Data,” Statistics, Vol. 37, No. 1, 2003, pp. 65-72. doi:10.1080/0233188021000004639 [27] A. S. Papadapoulos and W. J. Padgett, “On Bayes Esti- mation for Mixtures of Two Exponential-Life-Distribu- tions from Right-Censored Samples,” IEEE Transactions on Reliability, Vol. 35, No. 1, 1986, pp. 102-105. doi:10.1109/TR.1986.4335364 [28] A. F. Attia, “On Estimation for Mixtures of 2 Rayleigh Distribution with Censoring,” Microelectronics Reliabil- ity, Vol. 33, No. 6, 1993, pp. 859-867. doi:10.1016/0026-2714(93)90259-2 [29] K. E. Ahmad, H. M. Moustafa and A. M. Abd-El-Rah- man, “Approximate Bayes Estimation for Mixtures of Two Weibull Distributions under Type II Censoring,” Journal of Statistical Computation and Simulation, Vol. 58, No. 3, 1997, pp. 269-285. doi:10.1080/00949659708811835 [30] A. A. Soliman, “Estimators for the Finite Mixture of Rayleigh Model Based on Progressively Censored Data,” Communications in Statistics—Theory and Methods, Vol. 35, No. 5, 2006, pp. 803-820. doi:10.1080/03610920500501379 [31] M. Saleem and M. Aslam, “Bayesian Analysis of the Two Component Mixture of the Rayleigh Distribution Assuming the Uniform and the Jeffreys Priors,” Journal of Applied Statistical Science, Vol. 16, No. 4, 2008, pp. 105-113. Copyright © 2012 SciRes. OJS  T. A. ABUSHAL, A. M. AL-ZAYDI Copyright © 2012 SciRes. OJS 367 Properties of the Bayes sian Estimation Us- saini and K. E. Ahmad, “On the Identifiabil- [32] M. Saleem and M. Aslam, “On Prior Selection for the Mixture of Rayleigh Distribution Using Predictive Inter- vals,” Pakistan Journal of Statistics, Vol. 24, No. 1, 2007, pp. 21-35. [33] M. Saleem and M. Irfan, “On ity o estimates of the Rayleigh Mixture Parameters: A Simula- tion Study,” Pakistan Journal of Statistics, Vol. 26, No. 3, 2010, pp. 547-555. [34] A. Zellner, “Bayesian and Non-Baye ing Balanced Loss Functions,” In: J. O. Berger and S. S. Gupta, Eds., Statistical Decision Theory and Methods. V, Springer, New York, 1994, pp. 339-390. [35] M. J. Jozani, E. Marchand and A. Parsian, “Bayes Esti- mation under a General Class of Balanced Loss Func- tions,” Universite de Sherbrooke, Sherbrooke, 2006. [36] E. K. Al-Hus f Finite Mixtures of Distributions,” IEEE Transac- tions on Information Theory, Vol. 27, No. 5, 1981, pp. 664-668. doi:10.1109/TIT.1981.1056389 [37] K. E. Ahmad and E. K. Al-Hussaini, “Remarks on the Non-Identifiability of Mixtures of Distributions,” Annals of the Institute of Statistical Mathematics, Vol. 34, No. 1, 1982, pp. 543-544. doi:10.1007/BF02481052 [38] S. J. Press, “Subjective and Objective Bayesian Statistics: tion Principles, Models and Applications,” Wiley, New York, 2003. [39] J. Aitchison and I.R. Dunsmore, “Statistical Predic Analysis,” Cambridge University Press, Cambridge, 1975.
|