Positioning
Vol.5 No.1(2014), Article ID:42595,10 pages DOI:10.4236/pos.2014.51002
Multipath Error Analysis of COMPASS Triple Frequency Observations
1College of Surveying and Geo-Informatics, Tongji University, Shanghai, China; 2Center for Spatial Information Science and Sus-tainable Development, Tongji University, Shanghai, China.
Email: voldemortpotter@sina.com, yzshen@tongji.edu.cn
Copyright (c) 2014 Xuying Ma, Yunzhong Shen. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In accordance of the Creative Commons Attribution License all Copyrights (c) 2014 are reserved for SCIRP and the owner of the intellectual property Xuying Ma, Yunzhong Shen. All Copyright (c) 2014 are guarded by law and by SCIRP as a guardian.
Received November 11th, 2013; revised December 4th, 2013; accepted December 11th, 2013
Keywords:BeiDou-2 (COMPASS); Multipath; Wavelet Filtering; Single Point Positioning
ABSTRACT
The BeiDou-2 satellite navigation system broadcasts triple frequency data. In this paper, the pseudorange mul- tipath is extracted by using the geometry-free and ionosphere-free combination of one pseudorange and two phase measurements, and the phase multipath is extracted by using triple frequency phase measurements, respectively. By using several days’ static observation data, we exact the noisy pseudorange and phase multipath of three types of satellites, GEO, IGSO and MEO satellites. Because of the low frequency characteristics of the multipath, the low frequency wavelet filter is further used to recover the high-precision low frequency multipath signals that are specified by their amplitudes, periods and phases. The results show that the multipath periods are about 86160s, 86158s and 46391s for GEO, IGSO and MEO satellites, respectively, which coincide with that of the corresponding satellite orbits. Then we use the extracted multipath signals to correct the pseudorange measurements in order to improve the accuracy of point positioning. The positioning accuracy in East-West di- rection can be significantly improved by using the multipath corrected pseudorange measurements, and in the other two directions the positioning accuracy can also be improved to some extent.
1. Introduction
The BeiDou-2 (COMPASS) satellite navigation system will provide regional service in China and its surrounding area in 2012. Since the multipath cannot be eliminated via combined or differential GNSS observations, they are usually suppressed by using choke antenna and other hardware devices, or computed and then corrected to the measurements [1-3]. In recent years, Feng et al. [1] conducted a preliminary investigation on the multipath of BeiDou-2 satellites. Wu and Zhou [4] extracted pseudorange multipath of GEO and IGSO satellites and corrected them to improve the precision of single point positioning. The triple frequency carrier phase measurements can form both geometry-free (GF) and ionosphere-free (IF) combinations, which only contain the combined phase multipath and random observation errors [6]. Montenbruck et al. [7] used these combinations to analyze the triple frequency phase and pseudorange noises of BeiDou-2 satellites. After denoising processing of the multipath, in this paper we will extract the multipath of pseudorange and phase from pseudorange and carrier phase combinations and triple frequency carrier phase combinations, respectively, then correct the extracted multipath to pseudorange measurements to carry out point positioning.
2. Multipath Extraction
Besides receiving signals transmitted by satellites directly, GNSS receiver also receives the indirect signals reflected from the objects nearby receiving antenna at the mean time. The errors produced by overlapping signals are known as multipath.
As shown in Figure 1, S represents the direct signals received by GNSS receiver, S' the indirect signals reflected
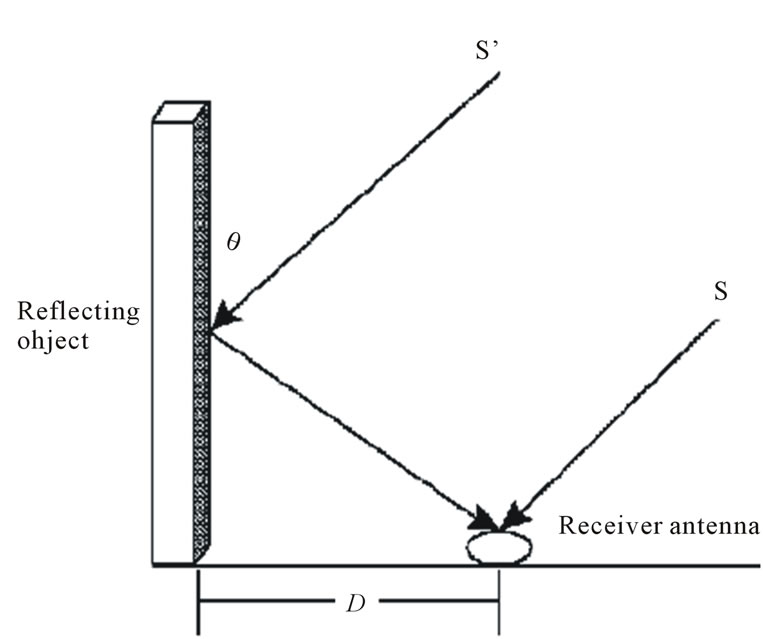
Figure 1. BeiDou-2 multipath generation mechanism.
from the surrounding surface features. θ is the angle between reflecting object and indirect signal and D is the distance between reflecting object and receiver antenna. An indirect signal has longer than a direct signal by ; thereby these indirect signals will contaminate the direct pseudorange and carrier phase measurements and reduce the positioning accuracy of BeiDou- 2 satellite navigation system [4,5,8].
; thereby these indirect signals will contaminate the direct pseudorange and carrier phase measurements and reduce the positioning accuracy of BeiDou- 2 satellite navigation system [4,5,8].
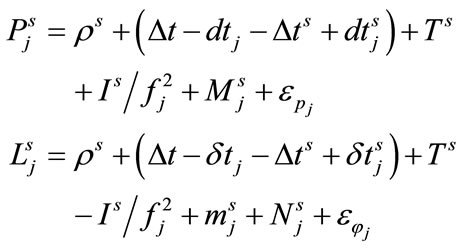
The observation equations of pseudorange and carrier phase read:
 (1)
(1)
where, Pi and Li represent the pseudorange and carrier phase of frequency , respectively, ρs is the distance between GNSS receiver and satellite s; Δt and Δts are the receiver and satellite clock errors; δtj and δtjs denote the frequency-dependent receiver and satellite hardware biases for phase, while dtj and dtjs for code; T and I represent the troposphere and ionosphere delays; λj and Njs represent the phase wavelength and ambiguity including the initial phase biases of receiver and satellite, Mj and mj represent multipath of pseudorange and phase, respectively,
, respectively, ρs is the distance between GNSS receiver and satellite s; Δt and Δts are the receiver and satellite clock errors; δtj and δtjs denote the frequency-dependent receiver and satellite hardware biases for phase, while dtj and dtjs for code; T and I represent the troposphere and ionosphere delays; λj and Njs represent the phase wavelength and ambiguity including the initial phase biases of receiver and satellite, Mj and mj represent multipath of pseudorange and phase, respectively,  and
and  represent the pseudorange and carrier phase measurement errors respectively. It is emphasized that all terms in (1) are in unit of meter.
represent the pseudorange and carrier phase measurement errors respectively. It is emphasized that all terms in (1) are in unit of meter.
To exact the pseudorange multipath, one needs to eliminate all geometric and ionospheric terms. In general, the geometry-free and ionosphere-free combination is formed using one pseudorange and two phases. With loss of generality, let us form the geometry-free and ionospherefree combination by using the ith frequency pseudorange and the jth and kth frequency phases, the combination is as follows:
 (2)
(2)
Here, according to the condition that the combination is both geometry-free and ionosphere-free, the coeffici- ents are solved:
 (3)
(3)
Obviously, . Substituting (1) and (3) into (2) yields
. Substituting (1) and (3) into (2) yields
 (4)
(4)
where
 (5)
(5)
It is well-known that the inter-frequency hardware biases are very stable in time for both receiver and satellite. Thereby,  can be deemed as constant. Moreover
can be deemed as constant. Moreover  is constant as well if there is no cycle slip happens. Considering the multipath is periodic and can be average out over a period of n epochs. Therefore the constant can be estimated as
is constant as well if there is no cycle slip happens. Considering the multipath is periodic and can be average out over a period of n epochs. Therefore the constant can be estimated as . Then the estimat-ed pseudorange multipath is
. Then the estimat-ed pseudorange multipath is
 (6)
(6)
Assuming that the precision of phase is unique for different frequencies, i.e.,  and also considering the effect of phase multipath (
and also considering the effect of phase multipath ( ), then the precision the exacted pseudorange multipath is
), then the precision the exacted pseudorange multipath is
 (7)
(7)
In this paper, we use the above methods to exact the pseudorange multipath of triple frequency.
The phase multipath cannot be assessed using triple carrier phase measurements [4,7]. We first form two iono- sphere-free combinations from two pairs of carrier frequen-cies, then subtract the results from each other and obtain the geometry-free and ionosphere-free (GF-IF) combination as follows [6,7,10]:
 (8)
(8)
where, DIF denotes the GF-IF combination. M12 and M13 are multipath combination of B1,B2 and B1,B3. N12 and N13 are ambiguity combinations of B1,B2 and B1,B3. The combination in (8) are formed by carrier phase measurements, so we should detect cycle slips before subsequent analysis. If cycle slips were found, we mark it and make these data as a segment. In a data segment of no cycle slips, the GF-IF combination mainly consists of receiver measurement errors and multipath on the respective frequencies plus a constant determined by the carrier phase ambiguities. In the case of no cycle slips the ambiguity is a constant and easy to handle [11]. Therefore the combination (8) can be used to evaluate the phase multipath. The carrier phase measurement errors and phase multipath are with the same order, and linear combination will amplify measurement errors, so denoising processing can be utilized to extract more accurate phase multipath.
3. Characteristics of Multipath
Experimental data are collected by BeiDou-2 multi-frequency receiver at 3 stations, CCHU, CKUN and CWUQ, the sampling interval is 1 s. In this paper we utilize consecutive day’s measurements from October 11, 2011 to October 13, 2011 and from July 4, 2012 to July 20 to carry out analysis.
3.1. Multipath of Different Stations
Different receiver surroundings lead to the numerical difference of multipath. By processing 24 hours (Oct 11, 2011) measurements of 3 stations, we have extracted the multipath of B1, B2 and B3 frequency pseudorange and geometry-free and ionosphere-free phase combination for the GEO satellite C01 from each individual station. Figure 2 demonstrates 24-hour pseudorange multipath of C01 satellite of B1, B2 and B3 frequencies for three stations. Figure 3 demonstrates 24-hour phase multipath of C01 satellite for three stations.
As illustrated in Figure 2, the pseudorange multipath is in meter-level variation. It is also observed that the pseudorange multipath differs significantly from the different frequencies, especially at CKUN station. Moreover, the pseudorange multipath time series is station (location) dependent. Their behavior is completely different from the stations. For instance, the pseudorange multipath at CCHU station is mostly within 0.5 m, while at CKUN station the pseudorange multipath are larger and the maximum error can be up to 2 m. The multipath can also reflect the quality of observation data for each station indirectly.
As illustrated in Figure 3, the phase multipath is in centimeter-level variation. Comparing Figure 2 and Figure 3, phase multipath is significantly small and can be neglected compared to pseudorange multipath.
3.2. Pseudorange Multipath of Different Types of Satellites
BeiDou-2 navigation satellite constellation consists of three different types of satellites: GEO, IGSO and MEO satellites. As we know, the multipath is affected due to the reflection of the environment nearby the receiver. The satellite constellation is periodic such that after a certain period time, the receiver can suffer the basically same observation environment. As a result, the similar multipath can be introduced. To address this issue latter from our exacted pseudorange multipath, we firstly compute the theoretical period of the different types of satellites. The theoretical period is computed based on the mean motion velocity n as , where n is computed as
, where n is computed as
 . (9)
. (9)
where  is the Earth, a and
is the Earth, a and  are the semimajor axis of orbit ellipse and the perturbation of mean velocity, both of them come from broadcast ephemeris [15]. The orbital period of these three different satellite types are about 86164s, 86164s and 46392s, respectively.
are the semimajor axis of orbit ellipse and the perturbation of mean velocity, both of them come from broadcast ephemeris [15]. The orbital period of these three different satellite types are about 86164s, 86164s and 46392s, respectively.
We have extracted the pseudorange multipath of GEO, IGSO and MEO satellite at CCHU station using the data observed from Oct. 11, 2011 to Oct. 13, 2011 and Jul. 01 to Jul. 03 2012, respectively. The results are shown in Figure 4, Figure 5 and Figure 6 for GEO, IGSO and MEO, respectively.
As illustrated in Figure 4, the pseudorange multipath of GEO satellites has significant periodic characteristics. In Figure 5, the periodicity characteristics of IGSO satellites are not as obvious as GEO satellites. In Figure 6, since the unique orbital period of MEO satellite, the visible time is postponed about 2 hours related to yesterday, we extracted the multipath of relative time of three consecutive days. The periodicity characteristics of three types satellites are different, because the repeatability of multipath is contingent on the repeatability of geometric relationship between the satellite, receiving antenna and the surrounding environment. These three figures also certificate the conclusions mentioned in [4] that: The multipath of GEO satellites present low-frequency changes, while the IGSO and MEO satellites present highfrequency changes.
With an appropriate time shift to align geometric repeatability the constructed multipath correction profile can be applied to correct the measurements for another day [10]. We present two programs for discovering the repeat time, one using the spectrum analysis and the other the cross correlation of adjacent day’s multipath time series. Both methods show that the repeat time is highly
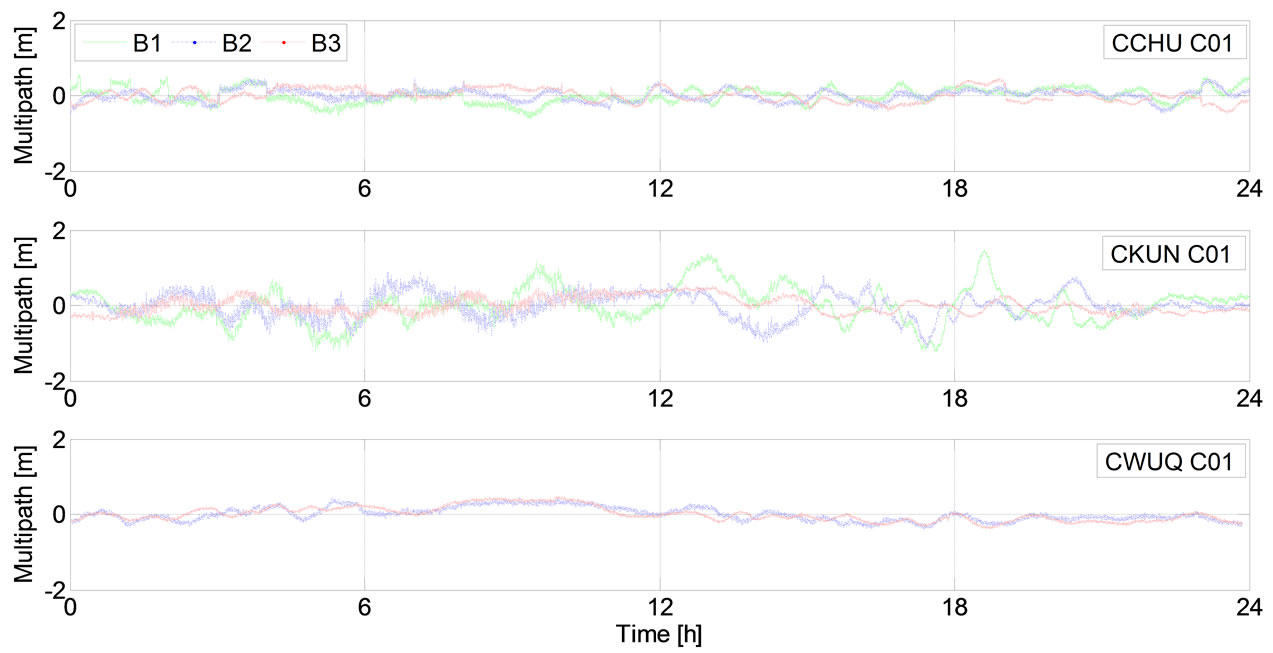
Figure 2. Daily pseudorange multipath of three frequencies B1 (green), B2 (blue) and B3 (red).
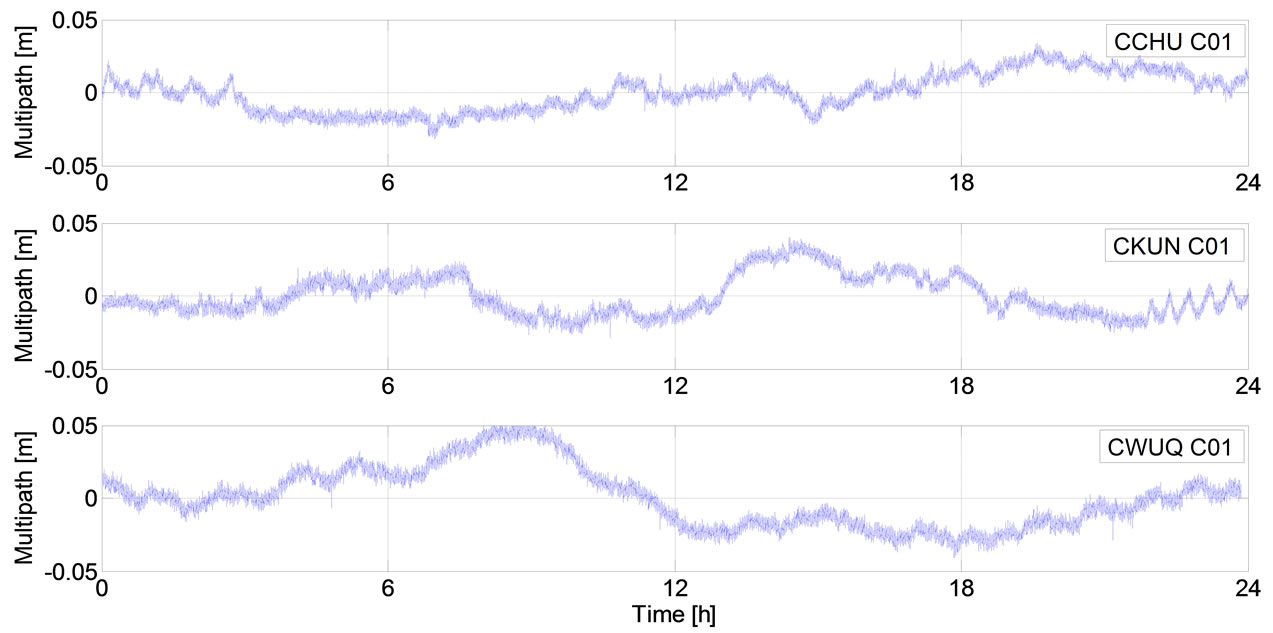
Figure 3. Daily phase multipath.
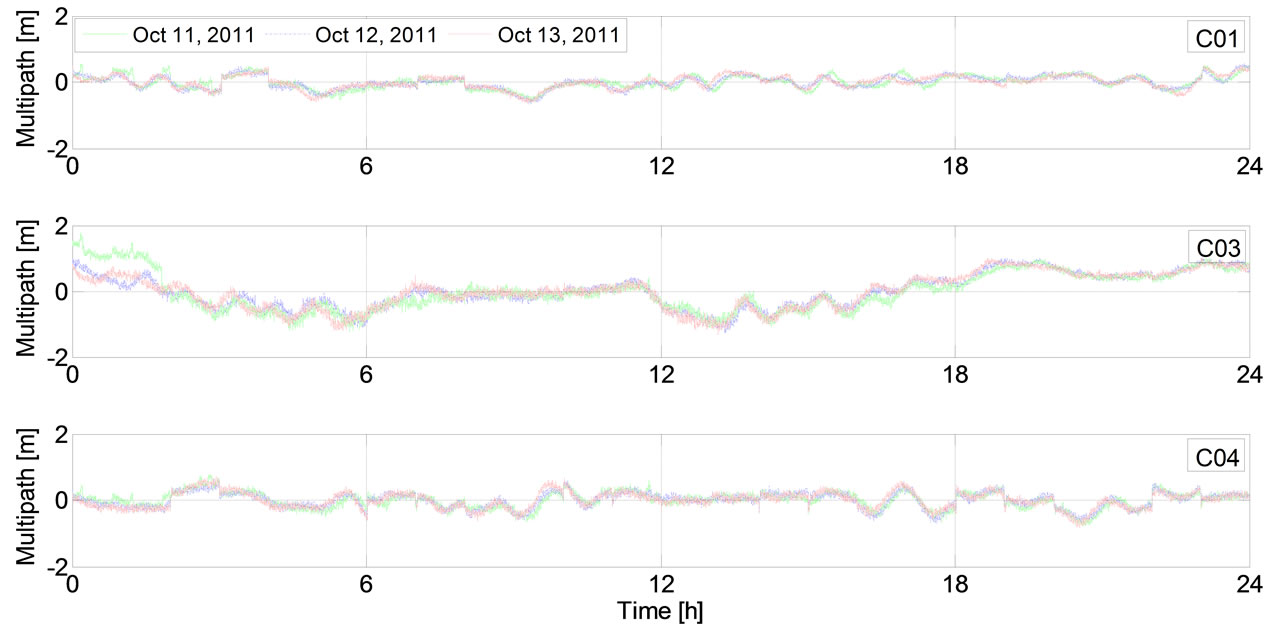
Figure 4. Time series comparison of three day’s B1 frequency multipath of GEO satellites.
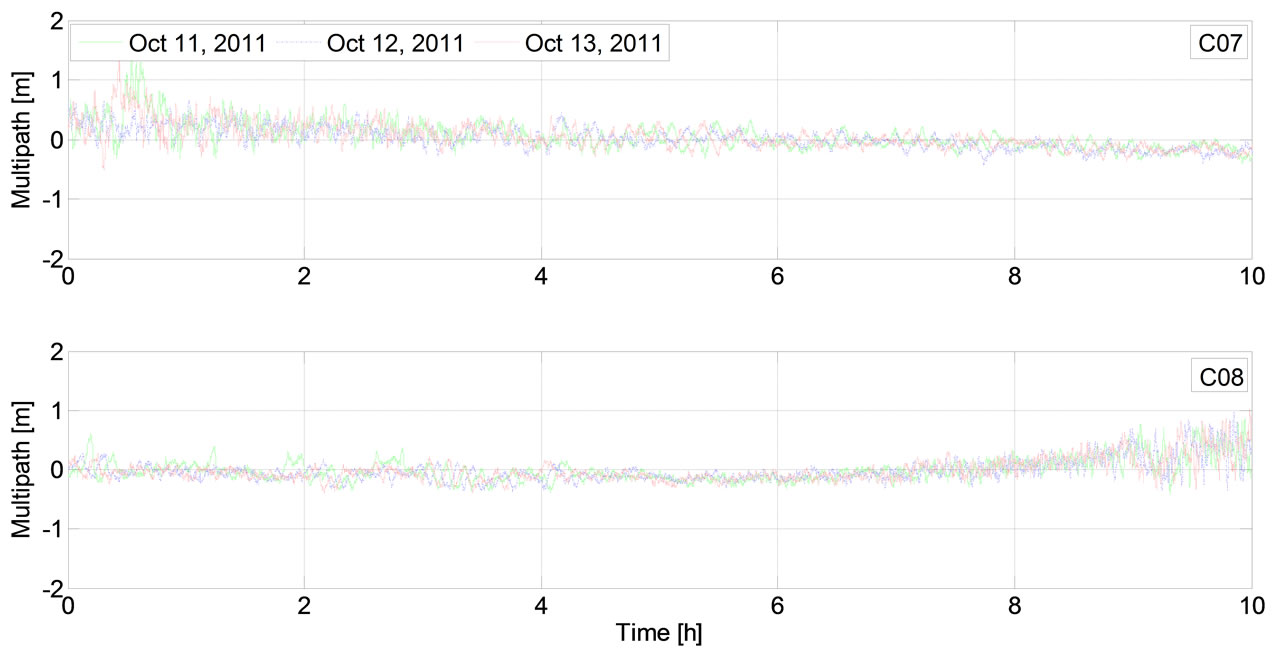
Figure 5. Time series comparison of three day's B1 frequency multipath of IGSO satellites.
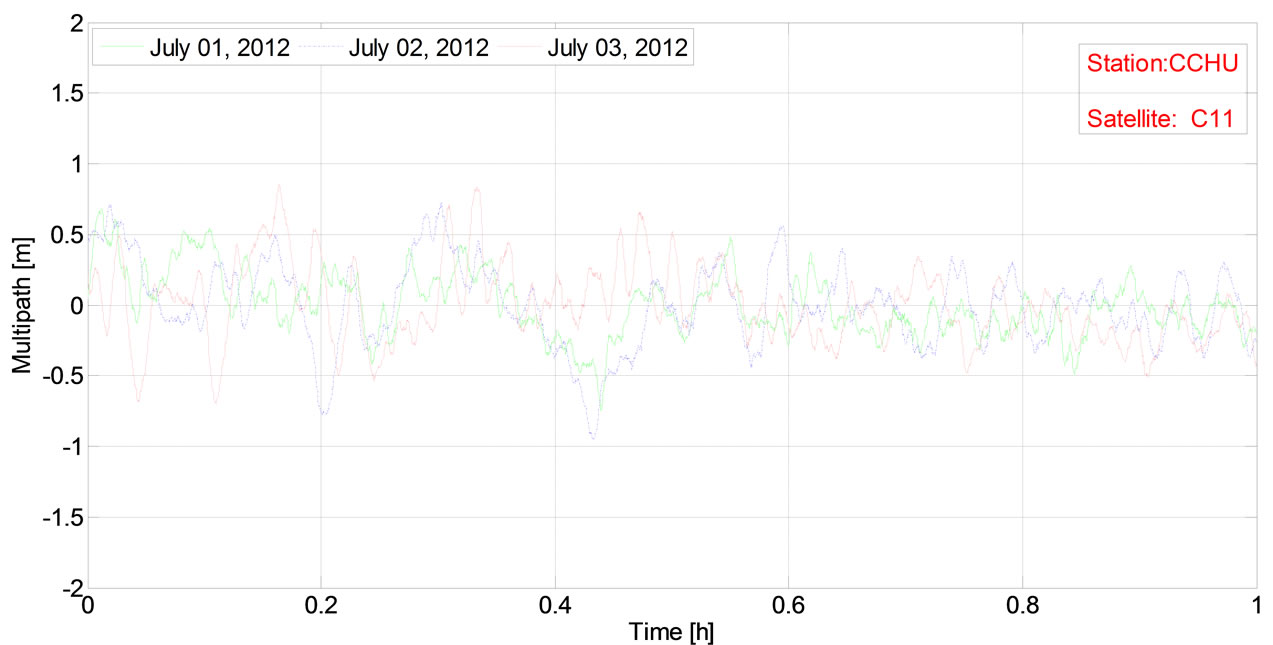
Figure 6. Time series comparison of three day’s B1 frequency multipath of MEO satellites.
correlated with satellite orbital period.
Carrying out the fast Fourier transformation (FFT) to the B1 frequency multipath time series of C01, C03 and C04 satellites at CCHU station for three consecutive day (Oct. 11, 2011-Oct. 13, 2011), the spectrums of these time series are obtained. The spectrum of C01 is shown in Figure 7. The periods corresponding to maximum amplitude are 86160s, 86164s and 86162s for C01, C03 and C04, respectively, which are basically consistent with the theoretical orbital period (86164s).
The IGSO satellites are not tracked over a full day, we cannot exact the multipath series for 24 hours. Therefore, we determine the period of multipath by means of calculating cross correlation of different day’s multipath errors [12,13]. The result of cross correlation is plotted in Figure 8 for days of Oct. 11, 2011 to Oct. 12, 2011. The correlation lag t as well as its associated maximum correlation coefficient is presented in Table 1 for IGSO satellite (C08).
The cross correlation peak between the first day and the second day is centered at 242s, the second and the third day is centered at 242s, the first day and the third day is centered at 483s, which is less than the sum of the two adjacent days. With the increasing number of days between the maximum correlation will gradually decrease. So the multipath of IGSO satellites appear a period ahead of time 242s every day, namely the period is about 86158s and it is basically consistent with the orbital period (86164s).
The multipath period of MEO satellites is determined similar to IGSO satellites. BeiDou-2 MEO satellite orbital period is about 12.92 hours [9]. This special orbital period characteristics lead to a fact that the visible time is postponed about 2 hours related to the day before, therefore
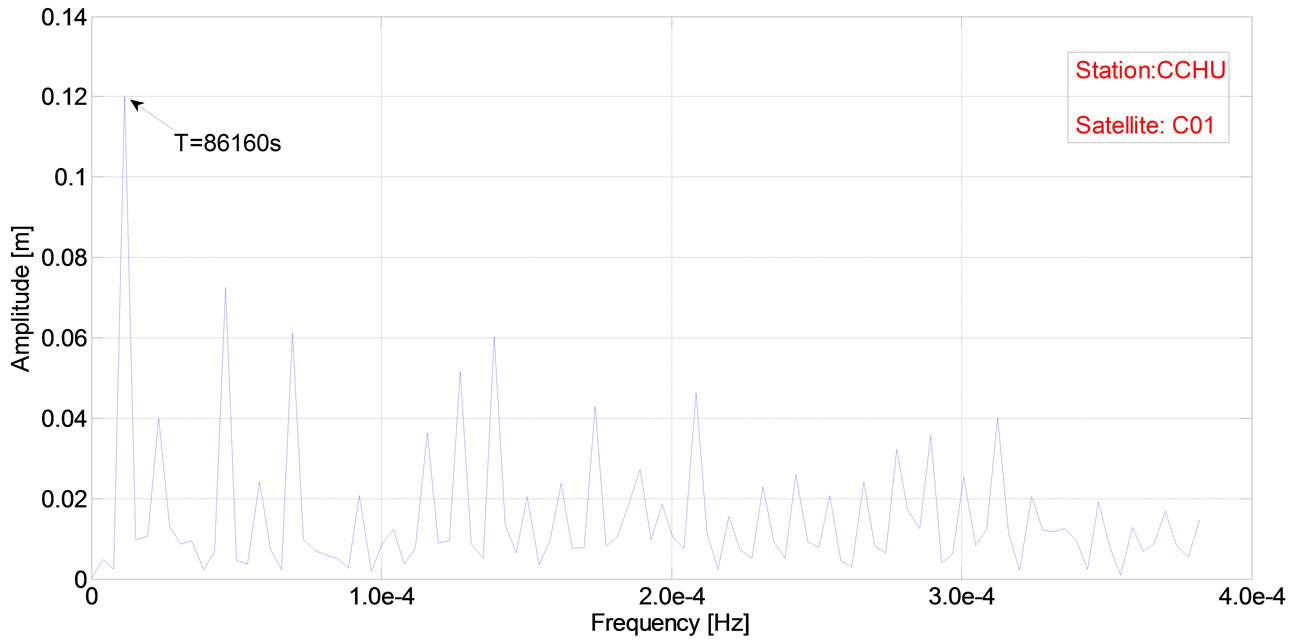
Figure 7. Spectrum analysis of GEO satellite multipath.
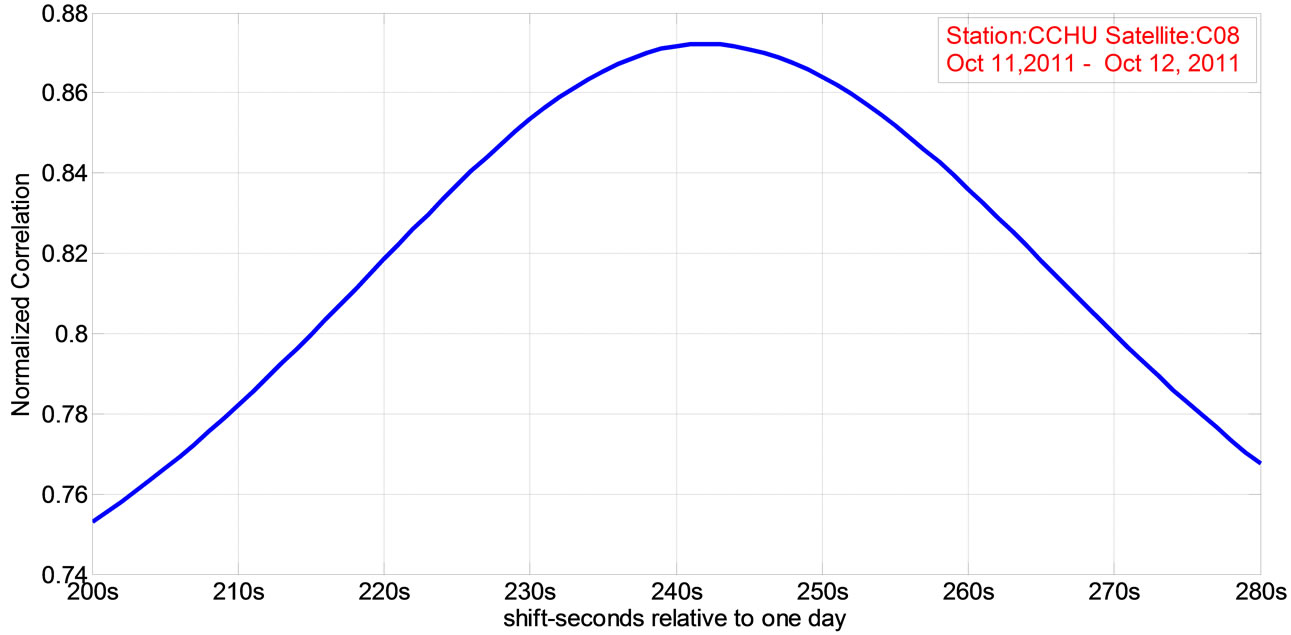
Figure 8. The correlation curve of multipath for IGSO satellite.
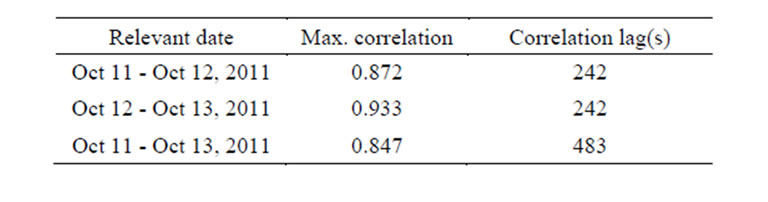
Table 1. IGSO satellite (C08) pseudorange multipath related delay statistics.
we can hardly determine the multipath period simply by analyzing the cross correlation of adjacent day’s multipath. Since the MEO satellite will appear at nearly the same time after a week, we compute the cross correlation of MEO multipath using the data of adjacent weeks in order to get a more accurate period. The result of cross correlation is plotted in Figure 9 for days of Jul. 05, 2012 to Jul. 12, 2012. Other related delay statistics of MEO multipath are listed in Table 2.
From the above statistics in Table 2, we can conclude that the MEO multipath appear a period ahead of time about 1720s every week compared to the week before. That is, it appears a period ahead of time about 245s every day. MEO satellites orbit around the earth 13 cycles every week, taking the 1720s shift-seconds relative to one week into account, a week’s time series is 603080s. Namely the period is about 46391s and it is basically consistent with the orbital period (46392s).
3.3. Carrier Phase Multipath of Different Types of Satellites
We will extract the multipath of GF-IF combinations. Since linear combination will amplify measurement errors, the measurement errors of GF-IF combination are as large as multipath. The high-precision phase multipath of GF-IF combinations can be extracted according to their low-frequency characteristics related to the high fre-
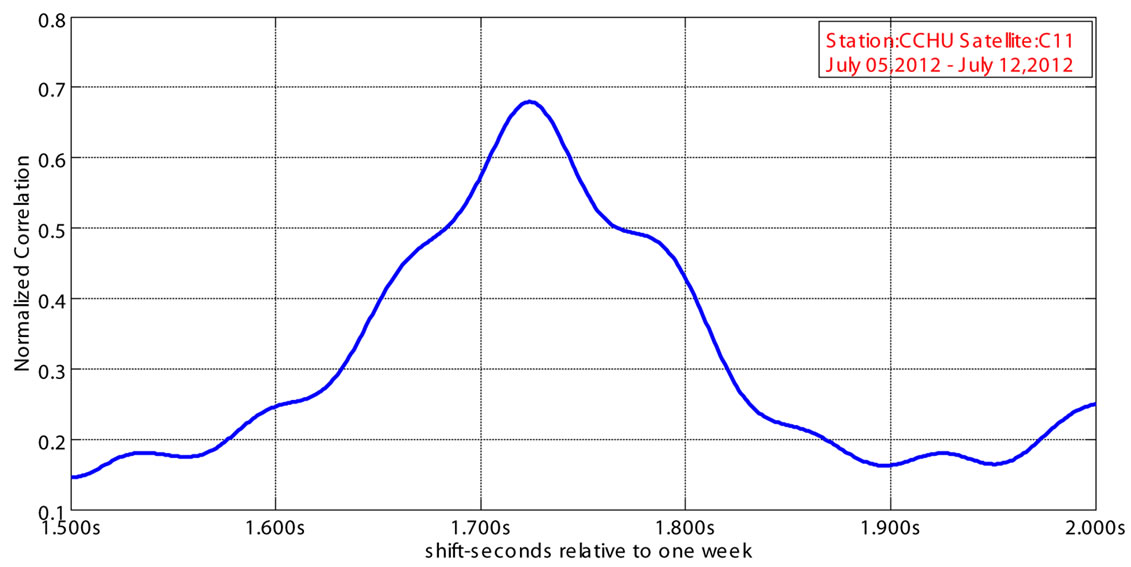
Figure 9. The correlation curve of multipath errors for MEO satellite.
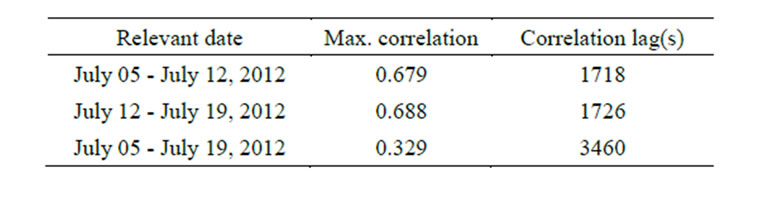
Table 2. MEO satellite (C11) pseudorange multipath related delay statistics.
quency characteristics of measurement errors by using 7 layer wavelet de-nosing of db8 wavelet.
We can see that the phase multipath are seriously contaminated by measurement errors in Figure 10, but in Figure 11 high-precision time series of phase multipath are obtained after wavelet de-noising processing.
By using the foregoing spectrum analysis methods, we depict GEO satellite (C01) phase multipath spectrum and calculate the period corresponding to the maximum amplitude peak as shown in Figure 12. The period is about 86160s and is consistent with the period of pseudorange multipath. Similarly, we determine the periods of IGSO and MEO satellites phase multipath by means of calculating cross correlation statistics in Table 3 and Table 4.
By comparing the figures of Figures 7 and 12 and the tables of Tables 1-4, we can conclude that the periods of phase and pseudorange multipath are basically the same. Both statistics show that the repeat time is variable across the constellation, at the few-second level for most satellites so the multipath periods of these three kinds of satellites are basically consistent with the orbital period of each kind satellite.
4. Impact of Multipath and Its Corrections on Pseudorange Positioning
4.1. Positioning Impact of Multipath and Its Periodicity
As illustrated in Figure 13, the pseudorange point positioning time series of CCHU station show that the trends
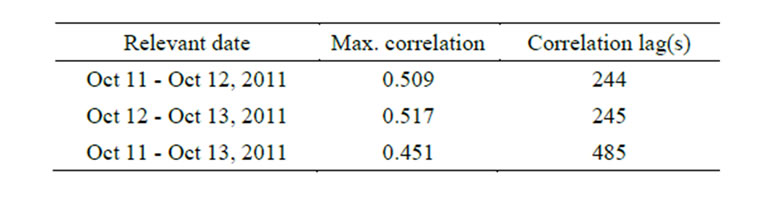
Table 3. IGSO satellite (C08) phase multipath related delay statistics.
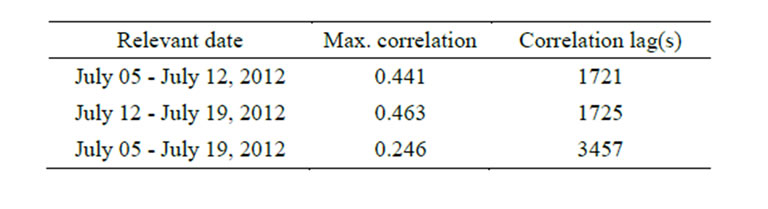
Table 4. MEO satellite (C11) phase multipath related delay statistics.
of positioning errors at adjacent days are basically the same. This cycle repeatability indicates the existence of multipath. Multipath will be recurring day after day at the same station [10]. The periodic trends reflect the periodicity of the multipath of GEO, IGSO and MEO satellites.
Therefore, at the same stations, under the circumstances of same satellites distribution, the effects of multipath are highly related with the surrounding environments. If we extract multipath and correct to the measurements, the positioning accuracy is looking forwards to be improved.
4.2. Multipath Corrected Pseudorange Point Positioning Accuracy Analysis
In order to verify the effect of multipath correction we carried out single point positioning using 4 station measurements including CLIN, CCHU, CSHA and CKUN. Since MEO satellites ephemerides are not available currently, we only use 3 GEO and 3 IGSO satellites constellation to carry out single point positioning. Extracting the pseudo range multipath and carry out positioning before and after multipath correction. The results are listed in
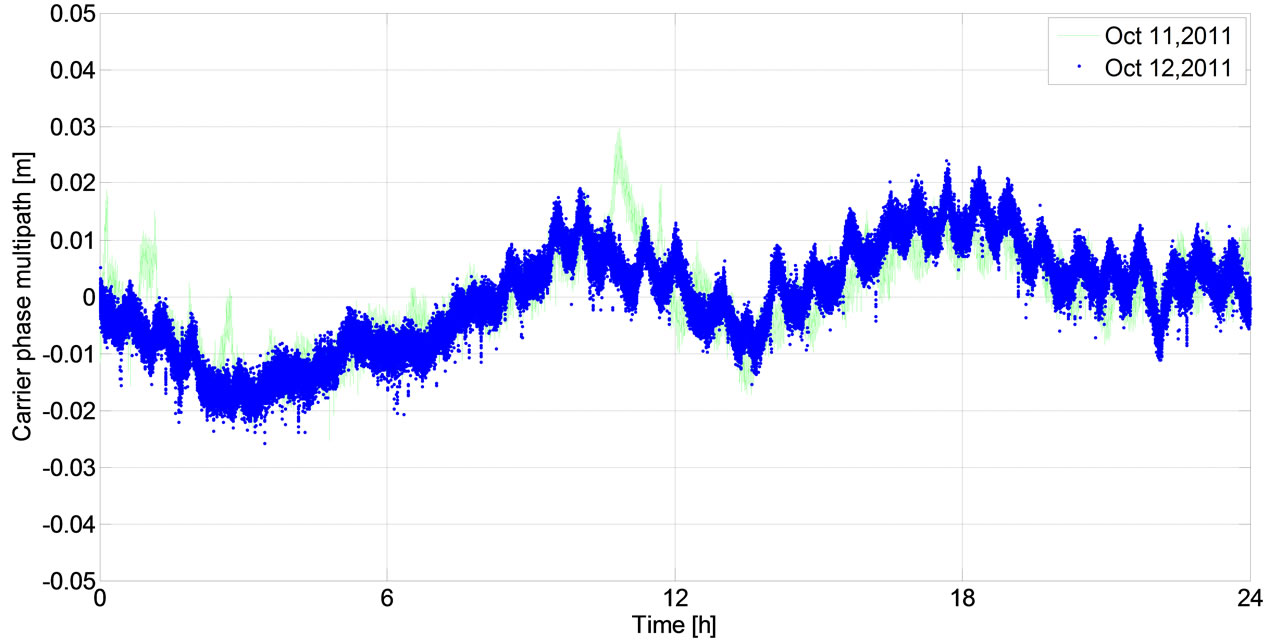
Figure 10. Adjacent two days phase multipath time series of C01.
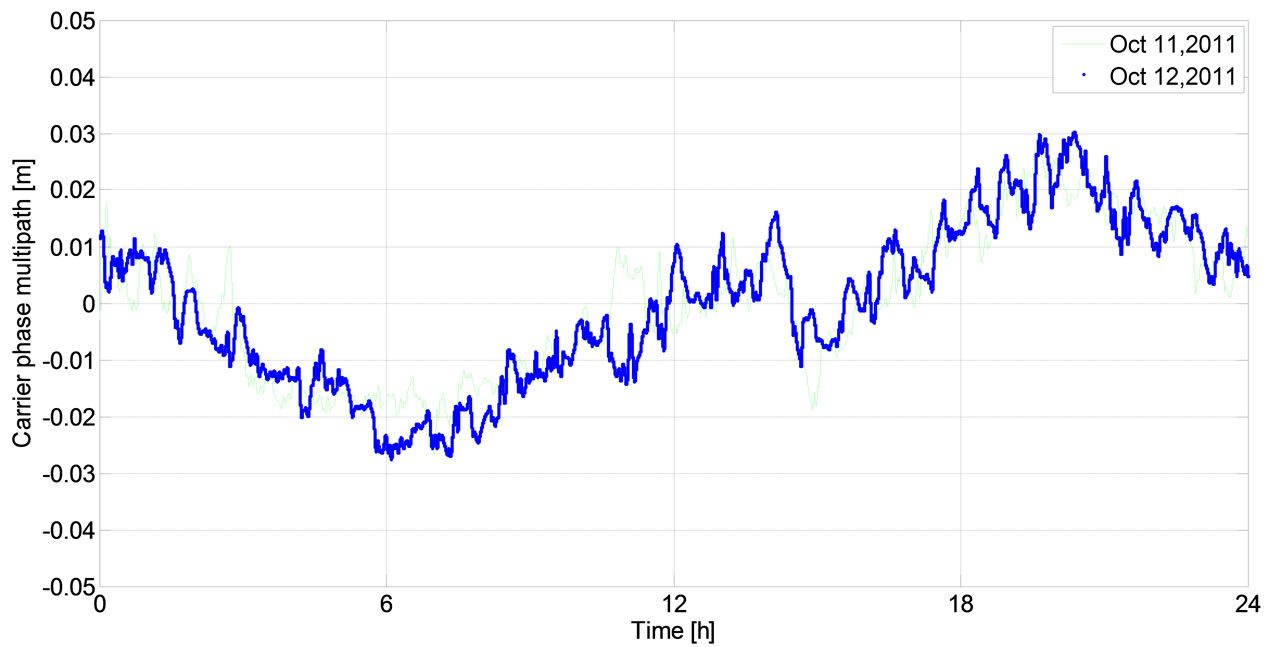
Figure 11. Adjacent two days phase multipath time series of C01 (after wavelet filtering).
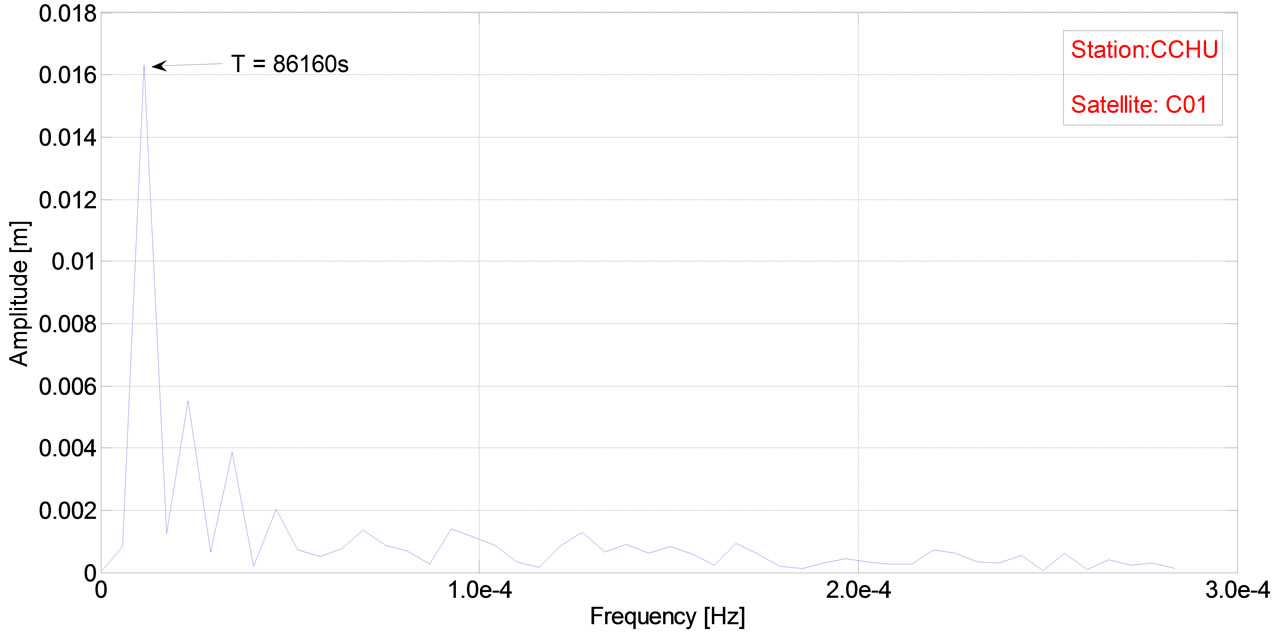
Figure 12. Spectrum analysis of GEO satellite phase multipath.
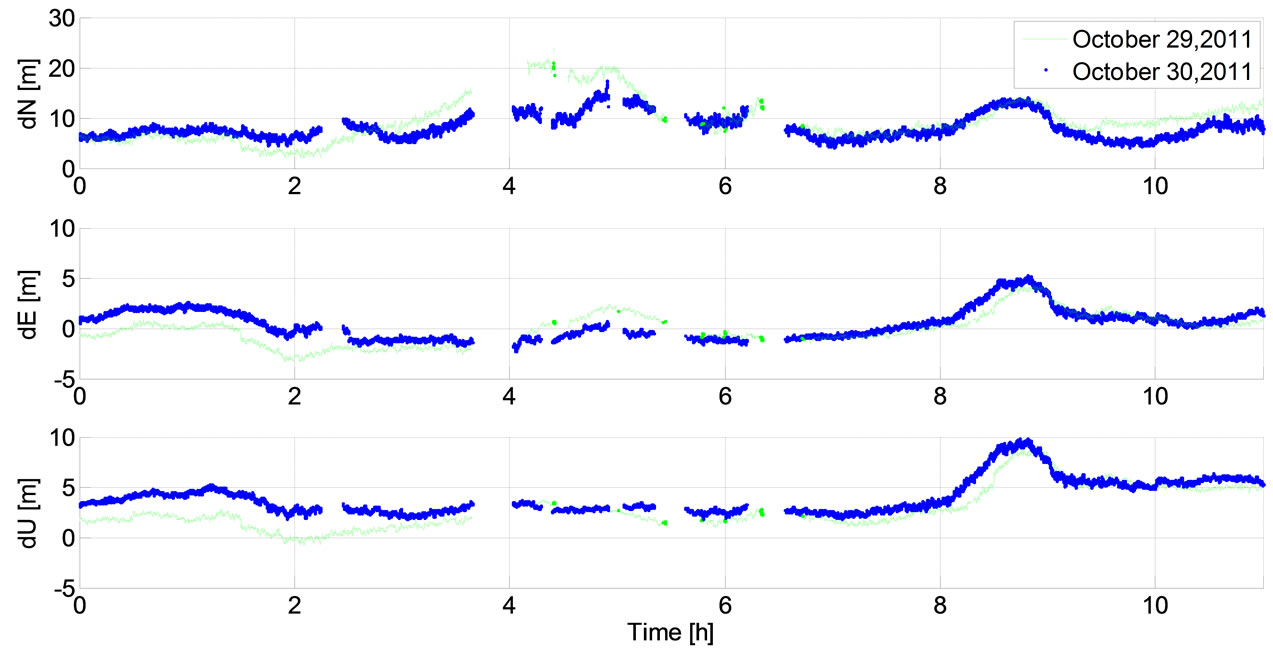
Figure 13. Adjacent two days single point positioning time series of CCHU Station.
The results of Table 5 show that the multipath correction will result in better positioning accuracy, especially in the east-west direction. Since the GEO satellites are located in east-west direction, the east-west direction positioning error RMS is smaller than the other two directions [14]. The GEO satellites are static relative to the earth and its multipath errors are more serious compared to that of IGSO or MEO satellites [4]. Therefore, east-west direction positioning accuracy increased more significantly than other two directions after correcting pseudorange multipath.
5. Conclusions
Based on the combinations of triple frequency measurements, we extract the multipath of pseudorange and phase, respectively. According to the above results and analysis, we can draw the following conclusions:
• The multipath of pseudorange and phase measurements is at the meter level and centimeter level, respectively.
The multipath of GEO satellites presents low-frequency changes. The multipath errors of IGSO, MEO satellites present high-frequency changes relative to GEO satellites.
The periods of multipath of the GEO, IGSO and MEO satellites are about 86160s, 86158s and 46391s, respectively. The periods of multipath are basically consistent with satellite orbit period.
Correcting multipath will result in better positioning accuracy, especially in east-west direction.
Acknowledgements
This work was mainly sponsored by Natural Science Foundation of China (Projects: 41074018), as well as
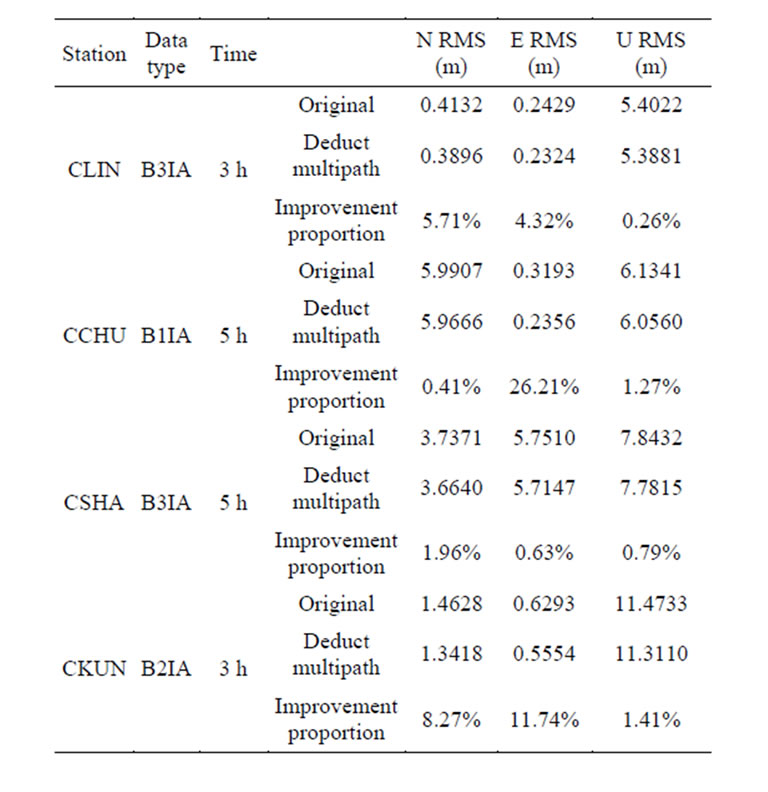
Table 5. Positioning accuracy using pseudorange with and without multipath-correction.
partly supported by Kwang-Hua Fund for College of Civil Engineering, Tongji University. Li Bofeng provided useful guidance during data processing and paper writing. Jiao Wenhai checked some of the calculated results. The writers thank Tang Chengpan and the anonymous reviewer for their comments.
REFERENCES
- X. C. Feng, G. P. Jin, J. J. Fan and X. L. Wu, “Experimentation and Analysis of Multipath in Code-Ranged by GNSS Receiver,” The Second China Satellite Navigation Conference Papers, 18-20 May 2011, Shanghai, pp. 881- 886.
- S. H. Liu, J. Q. Fan and W. H. Jiao, “Effects of Dynamics of Multipath on Code Tracking Loop,” Acta Geodaetica et Cartographica Sinica, Vol. 40, No. 1, 2011, pp. 1001- 1595.
- L. Alfred, “GPS Satellite Surveying,” John Wiley Sons, Inc., Hoboken, 2004.
- X. L. Wu, J. H. Zhou, et al., “Multipath Error Detection and Correction for GEO/IGSO Satellites,” Science China Physics, Mechanics and Astronomy, Vol. 55, No. 7, 2012, pp. 1297-1306. http://dx.doi.org/10.1007/s11433-012-4741-6
- X. L. Wu, S. S. Zhou, X. G. Hu and L. Liu, “Pseudo Range Fluctuation Analysis of Regional Navigation System,” The Second China Satellite Navigation Conference Papers, 18-20 May 2011, Shanghai, pp. 428-433.
- B. F. Li, Y. M. Feng and Y. Z. Shen, “Three Carrier Ambiguity Resolution: Distance-Independent Performance Demonstrated Using Semi-Generated Triple Frequency GPS signals,” GPS Solutions, Vol. 14, No. 2, 2010, pp. 177- 184. http://dx.doi.org/10.1007/s10291-009-0131-6
- O. Montenbruck, A. Hauschild, P. Steigenberger, U. Hugentobler, P. Teunissen and S. Nakamura, “Initial Assessment of the COMPASS/BeiDou-2 Regional Navigation Satellite System,” GPS Solutions, Vol. 17, No. 2, 2013, pp. 211-222. http://dx.doi.org/10.1007/s10291-012-0272-x
- S. S. Zhou, X. G. Hu and B. Wu, “Orbit Determination and Time Synchronization for a GEO/IGSO Satellite Navigation Constellation with Regional Tracking Network,” Science China Physics, Mechanics and Astronomy, Vol. 54, No. 6, 2011, pp. 1089-1097. http://dx.doi.org/10.1007/s11433-011-4342-9
- L. C. Chen, “Compass Systems MEO Satellite In-Orbit Performance Verification and Analysis,” The Second Mapping Scientific Frontiers Forum Papers, 13-15 August 2010, Changchun, pp. 153-158.
- K. M. Larson, A. Bilich and P. Axelrad, “Improving the Precision of High-Rate GPS,” Journal of Geophysical Research, Vol. 112, No. B5, 2007, pp. 422-433. http://dx.doi.org/10.1029/2006JB004367
- R. Xu, D. F. Huang, Y. H. Zhou and C. G. Li, “The Application of the Time Series Analysis to GPS Residuals,” Science of Surveying and Mapping, Vol. 34, No. 2, 2009, pp. 58-60.
- W. J. Dai, X. L. Ding, et al., “EMD Filter Method and Its Application in GPS Multipath,” Acta Geodaetica et Cartographica Sinica, Vol. 35, No. 11, 2006, pp. 1001-1595.
- L. G. Yuan, D. F. Huang, X. L. Ding, et al., “On the Influence of Signal Multipath Effects in GPS Carrier Phase Surveying,” Acta Geodaetica et Cartographica Sinica, Vol. 33, No. 3, 2004, pp. 1001-1595.
- T. Schempp, J. Burke and A. Rubin, “WAAS Benefits of GEO Ranging,” Proceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2008), Savannah, 16-19 September 2008, pp. 1903-1910.
- D. C. Agnew and K. M. Larson, “Finding the Repeat Times of the GPS Constellation,” GPS Solutions, Vol. 11, No. 3, 2006, pp. 71-76. http://dx.doi.org/10.1007/s10291-006-0038-4