Intelligent Control and Automation
Vol. 3 No. 4 (2012) , Article ID: 24858 , 12 pages DOI:10.4236/ica.2012.34034
Sequential Observation and Control of Robotic Systems Subjected to Measurement Delay and Disturbance
Department of Production Engineering and Mechanical Design, Faculty of Engineering, Menoufiya Unicersity, Minoufia, Egypt
Email: elbeheiry@yahoo.com
Received July 9, 2012; revised August 9, 2012; accepted August 17, 2012
Keywords: Nonlinear Observers; Robotic Manipulators; Time Delay; Joint Acceleration Control
ABSTRACT
An approach for motion control and observation of robotic manipulators is presented in this article. It links the design of a joint acceleration controller to the design of a variable structure observer including Luenberger-like observation term. Both the joint acceleration controller and the observer that are introduced in this paper are very likely to use either large or moderate or small gains. Thus the time delay issue of the output measurements is highly taken into consideration in the design of the intended observers. The observer design is therefore based on two different generalized forms of nonlinear systems with/without undelayed outputs. A study to investigate the effects of the gains of the joint acceleration controller on the performance capabilities of the observer is introduced. Also, the effects of the time delay factor on the operation of both the controller and the observer and their own interaction are studied. Then a chain observer design is presented for circumventing the time delay effects. The time delay constant is found to be of vital importance to the robot performance capabilities. Moreover, the results show that the gains of the joint acceleration controller are of significant influence on the operation of the proposed observers.
1. Introduction
In modern robot manipulators, the robot controllers are required to provide the capability to overcome unmodeled dynamics, variable payloads, friction torques, torque disturbances, parameter variations, and measurement noises. Full knowledge of these surrounding conditions seems to be impossible in the majority of robotic applications. In addition, fullor limited-state measurements of robotic systems prevent the implementation of some important controllers to some important industrial environment. Mostly, Model-based observers, which are the topic of this article, are considered very well adapted for state estimation and allow, in most cases, a stability proof and a methodology to tune the observer gains, which guarantee a stable closed loop operation. Time delays if not considered might deteriorate the performance of a designed observer and, consequently, leads to degradation of an observer-based control strategy. Although delay systems are still resistant to many control policies, the delay properties are also surprising since several studies have shown that voluntary introduction of delays can also benefit the control system [1]. Time delays, when exist, could be constant [2] in system states or time-varying and unknown [3] and may exist in the output measurements with/without being time-constant [4- 7].
The intended observer design here is based on the observer developed by Germani et al. [8,9] in which the observer consists of a chain of observation algorithms reconstructing the system state at different delayed time instants (chain observer). This chain observer was based on the theory of state observers for systems without time delays that was developed by the same author in [10-12]. The observer design in [8-12] is based on transformation of a general nonlinear system into an observable form, where a Luenberger-like observer is designed to ensure the stability of the estimate error and the error dynamics perturbations are dominated by sufficiently large constant gains. This approach was partially extended in [13] for the design of a variable structure observer with a Luenberger-like term existing-without restoring to a transformation process. Once again, our work is extended to consider the design of a chain (predictive) type observer that is of variable structure and also having a Luenberger-like term. Also, we consider the transformation process as was introduced in [10-12]. The operation of this observer will be planned to reconstruct the velocity and acceleration signals from position measurement. Thus the operation of the joint acceleration feedback control will be based on an observed acceleration signals rather than using differentiation techniques or direct acceleration measurements.
The usual design procedure of a variable structure observer accompanied with a Luenberger-like term is twofold: 1) the sliding observer term takes care of the modeling errors, and 2) the role of the Luenberger-like term is mostly confined to ensuring system asymptotic stability via locating the poles of the observer dynamics in the left-half of the complex loci plane. It will be shown later that values of the gain matrix, K, would also have a great impact on the overall observation process. In the following, we extend the design procedure to derive necessary and sufficient conditions for the observer operation under the assumption that the modeling errors are composed of bounded and Lipschitz terms. The Luenberger-like observation term, in addition to providing the system stability, overpowers the Lipschitz nonlinearity while the sliding term is devoted to canceling the bounded one. Such a design would combine the two observation terms into a more interactive operation, and broaden the range of engineering applications.
The independent joint motion control of articulated manipulators comprises a separate PD or PID controller for each link with the nonlinear dynamic coupling effects handled as disturbances. This type of control has been widely applied to (gear-driven) industrial robots on a commercial scale. Ease of implementation, robustness, simplicity and fault tolerance are all advantages of the independent joint motion control over the centralized one [13,14]. In direct derive industrial robots; the performance of the conventional PD/PID controllers degrades because of the nonlinear coupling of the links which directly applies upon each joint.
Using the acceleration in a feedback loop for controlling robot arms can significantly influence the system performance of direct-drive robot arms [14-21]. An acceleration feedback enhances the disturbance rejection of an independent joint controller, which was originally presented in [17]. In this early study, it was assumed that a perfect measurement of position, velocity and acceleration signals is available. Such a perfect measurement, in a real industrial robotic application, does not exist [18]. Researchers have come to the fact that a successful implementation of an acceleration feedback is eventually digital [19], typically microprocessor based, and can be realized in two alternative techniques: i) signal differenttiation [17], and ii) observer design [20-23]. Xu and Han [13] introduced a different approach for practical implementation of acceleration sensing and modeling in the design of an independent joint motion control of robots with acceleration feedback. It is worth noting that the differentiation techniques inevitably produce noisy signals, which degrade the performance of the controller. Moreover, filtration of these signals leads to phase delay that further degrades the signal quality and limits the performance of the closed loop. The authors further developed a new estimator, which is called Newton Predictor Enhanced Kalman Filter, in [16]. The experimental investigations showed that this estimator provides a wide bandwidth and a small phase lag of the estimated acceleration while attenuating noises. While in [22] the authors introduced a new observer which uses only motor position sensing, together with accelerometers suitably mounted on the links of the robot arm. This configuration made the error dynamics on the estimated state independent from the dynamic parameters of the robot links, and can be tuned with standard decentralized linear techniques.
Obtaining acceleration signals without differentiation necessitates the use of observers instead of direct acceleration measurement. Observing the joint angular accelerations, which is a portion of this paper’s topic, is usually of the predictive type in order to compensate for the time delay that is likely to occur during implementation. On the other hand, a trade-off between the knowledge about the physical system and the number of the system states that may be reconstructed. However, it is quite possible that only the joint position will be available for a measurement from a shaft encoder. Imperfect actuator dynamics and measurements are direct reasons for occurring time delays. It is highly expected that an acceleration feedback control law would use a rather large gains. Therefore, attention should be paid to high frequency unstructured uncertainties such as time delay, flexure and resonance, measurement imperfection, violation of rigid body and continuous time assumptions [23].
Discontinuity in control laws leads to chattering in the torque control inputs, which is a highly undesirable and will result in unnecessary wear and tear on the actuator components. To cope up with this problem the modification of sliding mode control with continuous approximation of discontinuous control law was proposed, where the nonlinearitiy is approximated by high gain feedback in the boundary layer [24,25]. This eliminates chattering to some extent, but also the invariance properties associated with ideal sliding will be lost. A continuous SMC with PI disturbance estimation that was proposed in [26] requires only average inertia matrix and therefore partially solves this problem.
High-gain Luenberger-like and variable structure observers have been both proven effective when applied to robotic and non-robotic systems [13,25-27]. Our observer will combine the two observers in one generic form in order to capitalize on their benefits. The contribution in this paper is based on the contributions made recently by Germani et al. [8,9] and Dalla Mora et al. [10,11], which can all be regarded as extensions of the original work of Ciccarella et al. [12], Gauthier et al. [28], and Garcia and D’Attellis [29]. The approach that was adapted in [8-12,28,29] is to transform (1) into an observable form, where a Luenberger-like observer is designed to ensure the stability of the estimate error and the error dynamics perturbations are dominated by sufficiently large constant gains. This paper relies on the work of the above-mentioned authors and extends it to include a sliding observation term. The design approach of the sliding term exploits the significant contributions of Walcott and Zak [30] and Koshkouei and Zinober [31].
2. Joint Acceleration Control
For perfectly rigid robotic manipulators, the inverse dynamics equations of input torques are:
 (1)
(1)
where
 (2)
(2)
where  is the joint rotational angles,
is the joint rotational angles,  is the symmetric, positive-definite inertia matrix,
is the symmetric, positive-definite inertia matrix,  is the centripetal and Coriolis terms,
is the centripetal and Coriolis terms,  is a vector containing the gravity terms,
is a vector containing the gravity terms,  is a constant diagonal matrix of bounded dynamic coefficients of friction, and
is a constant diagonal matrix of bounded dynamic coefficients of friction, and  is a vector of static friction terms, and D is an unknown bounded disturbance. The conventional acceleration feedback loop can be introduced into the robotic system in the form:
is a vector of static friction terms, and D is an unknown bounded disturbance. The conventional acceleration feedback loop can be introduced into the robotic system in the form:
 (3)
(3)
where  is a diagonal matrix with a positive constant
is a diagonal matrix with a positive constant .
.  and
and  are vectors of the desired torques and angular accelerations, respectively.
are vectors of the desired torques and angular accelerations, respectively.
Neglecting any imperfection and phase lagging in joint actuator dynamics, it follows that:
 (4)
(4)
Equation (1) by the aid of Equations (3) and (4) becomes
 (5)
(5)
where I is the unity matrix. It is now obvious that the acceleration control law (3) reformulate the system dynamics as in Equation (5) regardless of how large the acceleration control gain  is chosen.
is chosen.
For purposes of acceleration control and observer codesign, it would much appropriate to rewrite Equation:
 (6)
(6)
Note here that if , then the acceleration feedback will be able to cut down the nonlinearities by
, then the acceleration feedback will be able to cut down the nonlinearities by . It is also worth noting that when
. It is also worth noting that when  and
and  the system dynamics can be eventually decoupled into a set of linear, time-invariant double integrator
the system dynamics can be eventually decoupled into a set of linear, time-invariant double integrator
 (7)
(7)
This control criterion will be compared and tested against the same control criterion where condition (7) does not apply and observers are designed to reconstruct the acceleration signals.
3. Joint State Observation
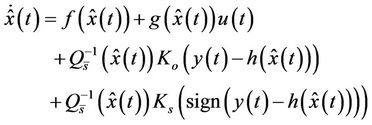
3.1. Observer for Undelayed System
Now, Equation (6) can be reformed into a generalized (undelayed) nonlinear system:
 (8)
(8)
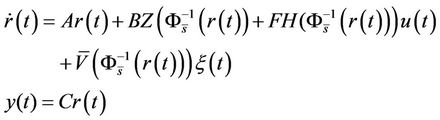
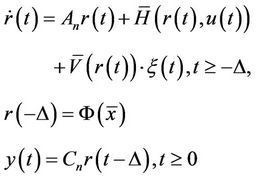
or into a generalized (delayed) system as follows:
 (9)
(9)
where  is the output measurement delay,
is the output measurement delay,  ,
,  is a vector of control inputs, and
is a vector of control inputs, and  is the undelayed output, the delayed output
is the undelayed output, the delayed output  is a function of the state
is a function of the state  at time
at time , where
, where ,
,  and
and  are integer exponents. Note that
are integer exponents. Note that  is a matrix whose columns are
is a matrix whose columns are , and
, and  are smooth vector fields of
are smooth vector fields of  and
and  is a
is a  smooth function, where
smooth function, where  is an integer that allows all the necessary differentiations needed in the paper. A function is said to be of class
is an integer that allows all the necessary differentiations needed in the paper. A function is said to be of class  if it is continuously differentiable
if it is continuously differentiable  times.
times.  is a perturbation input map and
is a perturbation input map and  is a bounded disturbance. It is assumed that the disturbance distribution
is a bounded disturbance. It is assumed that the disturbance distribution  is bounded and known.
is bounded and known.
The following notation will be used in this paper.  denotes an n-vector of real elements with the associated norm
denotes an n-vector of real elements with the associated norm  where
where  denotes transposition.
denotes transposition.  and λmin refer to the largest singular value and smallest eigenvalue of a matrix, respectively. A function is said to be Lipschitz function with Lipschitz constant γ if it satisfies
and λmin refer to the largest singular value and smallest eigenvalue of a matrix, respectively. A function is said to be Lipschitz function with Lipschitz constant γ if it satisfies  .A Lie derivative of a function
.A Lie derivative of a function  along a vector field
along a vector field  is given by
is given by  with
with  defined as the Lie derivative of order 0 and
defined as the Lie derivative of order 0 and  .
.
defined as repeated Lie derivative of order . For simplicity in the remaining of the text
. For simplicity in the remaining of the text ,
,  and
and  will denote
will denote ,
,  and
and , respectively.
, respectively.
In the following, the design procedure is to derive necessary and sufficient conditions for the operation of a variable structure observer under the assumption that the modeling errors are composed of Lipschitz terms and that the disturbance is unknown but bounded. The Luenberger-like observation term, in addition to providing the system stability, overpowers the Lipschitz nonlinearity by high gains while the sliding term is devoted to canceling disturbances. The operation of this observer will be planned to reconstruct the velocity and acceleration signals from position measurement. Thus the operation of the joint acceleration feedback control will be based on an observed acceleration signals rather than using differentiation techniques or direct acceleration measurements. It will be shown later that values of the acceleration controller gains,  , would be of great impact on the overall observation process.
, would be of great impact on the overall observation process.
For the undelayed system (8), let
 , (10)
, (10)
where  is the total number of outputs, and for each
is the total number of outputs, and for each  a vector function exists such that:
a vector function exists such that:
 (11)
(11)
where  is multi-index such that
is multi-index such that
 and then the square transformation matrix
and then the square transformation matrix  becomes:
becomes:
 (12)
(12)
Let  represents the vector of output derivatives:
represents the vector of output derivatives:
 (13)
(13)
where  when
when  Thus, exact state reconstruction is allowed due to the invertibility of
Thus, exact state reconstruction is allowed due to the invertibility of  and the exact knowledge of
and the exact knowledge of . Furthermore, a map
. Furthermore, a map  is said to be an observability map in a set
is said to be an observability map in a set  if it is a diffeomorphism in an open set that contains or coincides with
if it is a diffeomorphism in an open set that contains or coincides with . A system that admits an observability map in
. A system that admits an observability map in  for a given
for a given  is said to be drift-observable in
is said to be drift-observable in .
.
The nonsingular Jacobian  that is associated with the observability map
that is associated with the observability map  can be obtained as follows:
can be obtained as follows:
 (14)
(14)
The inverse map  exists in
exists in , and is defined by
, and is defined by . If the system is drift-observable in
. If the system is drift-observable in  and the maps
and the maps  and
and  are uniformly Lipschitz in
are uniformly Lipschitz in  and
and , respectively, then the system is said to be uniformly Lipschitz drift-observable in a set
, respectively, then the system is said to be uniformly Lipschitz drift-observable in a set . In addition, the system is said to be globally uniformly Lipschitz drift-observable if
. In addition, the system is said to be globally uniformly Lipschitz drift-observable if  [11].
[11].
The product of  has a useful structure:
has a useful structure:
 (15)
(15)
where
 (16)
(16)
where , and
, and  is the relative degree of the jth output such that [24]:
is the relative degree of the jth output such that [24]:
 (17)
(17)
where  is an observability map for the first
is an observability map for the first  outputs, and
outputs, and  is another one for the remaining
is another one for the remaining  so that the last
so that the last
row blocks of the product  are typically zeros. The H matrix is given by:
are typically zeros. The H matrix is given by:
 (18)
(18)
where the matrix  is
is , and is defined by:
, and is defined by:
 (19)
(19)
The undelayed system (8) can now be written in r-coordinates as follows:
 (20)
(20)
where
 and A, B and C in Equation (20) are block diagonal:
and A, B and C in Equation (20) are block diagonal:
 in which the
in which the  triples
triples 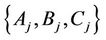 are Brunowsky matrices [10,11,14]:
are Brunowsky matrices [10,11,14]:
 (21)
(21)
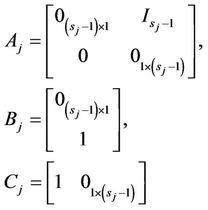
An efficient observer that combines the benefits of using a Luenberger-like observation term in addition to a sliding mode observation term is given by:
 . (22)
. (22)
This observer in  -coordinates is given by:
-coordinates is given by:
 (23)
(23)
where

represents a discontinuous function and the term  is devoted to enhancing the observer robustness against the disturbance via sliding mode. Recalling Equations (20) and (23), the error difference,
is devoted to enhancing the observer robustness against the disturbance via sliding mode. Recalling Equations (20) and (23), the error difference,
 between the true state and the observer estimate will be
between the true state and the observer estimate will be
 (24)
(24)
where
and
 .
.
For now, the systems considered in this study obey an assumption that the resulting transformation

and
are time invariant. Consequently,  becomes time invariant too.
becomes time invariant too.
It is more convenient to rewrite (24) in the following form:
 (25)
(25)
where  and
and  express system nonlinearities such that
express system nonlinearities such that
 (26)
(26)
Now, the r-transformed error system (25) is a linear system with continuous-time nonlinearities or uncertainties in the plant. The poof of the exponential convergence to zero observation error is given in [14] with the following conditions hold true:
 , (27)
, (27)
 (28)
(28)
where  and
and  are Lipschitz constants of the uniformly Lipschitz transformations
are Lipschitz constants of the uniformly Lipschitz transformations
 .
.
The matrix P for a positive scalar , is the solution of the following Riccati-like inequality
, is the solution of the following Riccati-like inequality
 (29)
(29)
and the gains of the sliding mode term,  , is given by
, is given by
 (30)
(30)
where E is a positive definite matrix, and CB and CF are nonsingular matrices.
The observer design approach is also based on the justification of the following assumptions, which are applicable to the incoming observer design for delayed system:
• A constant  exists such that
exists such that
 , (31)
, (31)
• The system is drift-observable in , and the map
, and the map  is uniformly Lipschitz together with
is uniformly Lipschitz together with  in
in , with constants
, with constants  and
and  that satisfy:
that satisfy:
 (32)
(32)
 (33)
(33)
• The nonlinearities  and
and  are uniformly Lipschitz in
are uniformly Lipschitz in  with a Lipschitz constants
with a Lipschitz constants  and
and  such that:
such that:
 (34)
(34)
where  is the constant that appeared in Equation (29).
is the constant that appeared in Equation (29).
• The discontinuous function  can be defined as [26, 32]
can be defined as [26, 32]
 (35)
(35)
 (36)
(36)
and must be satisfied.
• The maximum singular value of the matrix F satisfies:
 (37)
(37)
The design goal here is to provide appropriate conditions for choosing the constant observation gains  and
and  such that exponential convergence of the observation error to zero and existence of the sliding mode are both ensured.
such that exponential convergence of the observation error to zero and existence of the sliding mode are both ensured.
The gain matrix  is of block-diagonal structure such that
is of block-diagonal structure such that  is in the block-companion form [11]:
is in the block-companion form [11]:
 , (38)
, (38)
In (20), the matrix pair  is observable and the eigenvalues of
is observable and the eigenvalues of  can be assigned in the following companion form:
can be assigned in the following companion form:
 , (39)
, (39)
where the vector  contains the coefficient of the monic polynomial that has
contains the coefficient of the monic polynomial that has  as roots, and
as roots, and 
 is an n-eigenvalues that have to be assigned. When the assigned eigenvalues of
is an n-eigenvalues that have to be assigned. When the assigned eigenvalues of  are distinct, a Vander-monde matrix can diagonalize this matrix
are distinct, a Vander-monde matrix can diagonalize this matrix
 . (40)
. (40)
Remark: Given a set of  eigenvalues to be assigned to
eigenvalues to be assigned to , the gain vector
, the gain vector  is readily computed using the equation [11],
is readily computed using the equation [11],
 , (41)
, (41)
with  having non-repeated eigenvalues. The eigenvalues of
having non-repeated eigenvalues. The eigenvalues of  are chosen such that the norm of
are chosen such that the norm of  is bounded. If the
is bounded. If the  eigenvalues of
eigenvalues of  are assigned such that
are assigned such that

with , then
, then
 (42)
(42)
The possibility of choosing

where  is obtained via Equations (39)-(41) offers a higher number of degrees of freedom. It makes it possible to optimize the observer performance by proper choice of the eigenvalues for the physical system [11].
is obtained via Equations (39)-(41) offers a higher number of degrees of freedom. It makes it possible to optimize the observer performance by proper choice of the eigenvalues for the physical system [11].
Lemma. For  and
and  the
the  Riccatilike inequality (29) provides solution
Riccatilike inequality (29) provides solution  with
with  symmetric positive definite.
symmetric positive definite.
The proof of this Lemma is given by Della Mora et al. [9,10]. An interesting result is that the choice of the matrix P such that:
 , (43)
, (43)
solves the  Riccati-like inequality (29) for sufficiently large values of
Riccati-like inequality (29) for sufficiently large values of .
.
Remark [10]. An automatic choice of  can be adopted by taking
can be adopted by taking
 (44)
(44)
for a given . Thus the inequality (29) becomes a true
. Thus the inequality (29) becomes a true  Reccati inequality
Reccati inequality
 (45)
(45)
in which the matrix P is the only unknown.
3.2. Sequential Observer for Delayed Systems
For the sake of simplicity we will consider the derivation for single-input single-output systems. Differentiating  and upon the use of (9) and (14), and making an assumption like the ones in Equations (32) and (33), one gets the following properties:
and upon the use of (9) and (14), and making an assumption like the ones in Equations (32) and (33), one gets the following properties:
 , (46)
, (46)
 (47)
(47)
 (48)
(48)
where the matrices  are Brunowski matrices [9,10]:
are Brunowski matrices [9,10]:
 , (49)
, (49)
According to (17), it is assumed that the system has a relative degree n, which implies uniform observability as introduced in [26] and justified by assumptions like (32) and (33). For systems that do not meet such conditions, an extra assumption like (31) is needed in order to exclude bad inputs that can destabilize the observer operations. Since the design of the chain observer is based on the observer (22), and comprises an  linked systems of delayed differential equations, each one of dimension n, where m is a positive integer to be decided on the basis of the system operation and the size of Lipschitz constants as well.
linked systems of delayed differential equations, each one of dimension n, where m is a positive integer to be decided on the basis of the system operation and the size of Lipschitz constants as well.
The delayed state and input representation is such that:
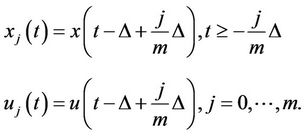 (50)
(50)
The chain observer that is proposed in this study is an extension of the one developed by Germani et al. [8,9]. The chain observer developed here is based on a variable structure observer rather than a Luenberger-like observer as was done in [8,9]. But the Luenberger-like observation term is also included in our design. The proposed observer design is such that:
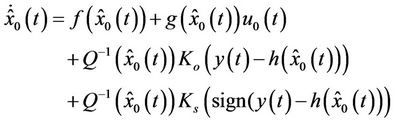 (51)
(51)
 (52)
(52)
The system is initially at the following conditions:
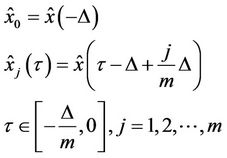 (53)
(53)
where  is any a priori estimate of the state. While
is any a priori estimate of the state. While  represents an estimate of the delayed state
represents an estimate of the delayed state  that is denoted here as
that is denoted here as .
.
Now we would like to express the proposed chain observer in (51) and (52) in the r-coordinates as follows:
 (54)
(54)
 (55)
(55)
 (56)
(56)
 (57)
(57)
where
 .
.
The transformed chain observer (54)-(57) comes out from the coordinate change of the proposed observer in (51) and (52). The validity of this transformation can be easily proven by: i) differentiation of  w.r.t. time to give (51), and ii) differentiation of
w.r.t. time to give (51), and ii) differentiation of  w.r.t. time for
w.r.t. time for  taking into consideration (51) in which
taking into consideration (51) in which  is substituted. Further details of this proof are found in [8,9].
is substituted. Further details of this proof are found in [8,9].
The exponential convergence of this observer assumes that the function is Lipschitz such that:
is Lipschitz such that:
 (58)
(58)
A positive real  and an integer
and an integer  are chosen such that the Lipschitz coefficient
are chosen such that the Lipschitz coefficient  of the function
of the function  and the time delay
and the time delay are such that:
are such that:
 (59)
(59)
A positive , a positive
, a positive , and gain vectors
, and gain vectors  and
and  will exist for the observer (51) and (52) such that
will exist for the observer (51) and (52) such that  for
for , and hence
, and hence
 (60)
(60)
where  depends on the estimation error in
depends on the estimation error in  as follows:
as follows:
 (61)
(61)
in which  and
and  are suitable positive constants. When the triple
are suitable positive constants. When the triple  has a uniform observation relative degree equal to
has a uniform observation relative degree equal to , then
, then  on
on  can be chosen equal to
can be chosen equal to . The proof of convergence is a slight modification of the proofs which were introduced in [8,9].
. The proof of convergence is a slight modification of the proofs which were introduced in [8,9].
4. Implementation, Results and Discussions
The observer and the controller have been applied to the 6-DOF PUMA 560 robot that is shown in Figure 1. The third-order PUMA model used in this study was derived in details in [33]. In this model, the actuator dynamics and the manipulator rigid links and joints were considered. The joint positions are the only measurement and the observer uses the controller output and the meas-
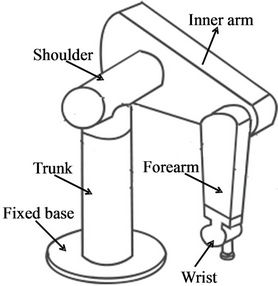
Figure 1. PUMA 560 robotic arm.
urements to construct the acceleration. For simulation purposes, we only consider the first three major joints while the other three minor joints are considered locked. The third-order nonlinear set of coupled differential equations of the PUMA arm is:
 (62)
(62)
where  are the position, velocity, and acceleration of ith joint. u is the armature voltage. Equation (62) can be rewritten as follows:
are the position, velocity, and acceleration of ith joint. u is the armature voltage. Equation (62) can be rewritten as follows:
 (63)
(63)
Applying acceleration feedback with gains  as presented in section II, one obtains
as presented in section II, one obtains
 (64)
(64)
Equation (61) in a state space variable x is:
 (65)
(65)
where
 ,
,
 .
.
Equation (65) in view of Equation (8) becomes

where and
and  have obvious definitions and the bounded disturbances,
have obvious definitions and the bounded disturbances,  , are temporarily ignored.
, are temporarily ignored.
The undelayed output functions are
 (66)
(66)
The state transformation in Equation (12), based on the locality of the system observation, is given by:
 (67)
(67)
and the resulting Jacobian  (14) will be time invariant. The desired acceleration signals for the simulation purposes are:
(14) will be time invariant. The desired acceleration signals for the simulation purposes are:
 (68)
(68)
The observer design parameters in Equations (32)-(39) have been chosen such that the gain matrix of a resulting high-gain observer is:
 (69)
(69)
Another set of parameters in Equations (32)-(39) has been chosen such that the gain matrix of a resulting lowgain observer is:
 (70)
(70)
The two solutions in Equations (69) and (70) provides the linear part of Equation (24), respectively, with the following eigenvalues:

Initial conditions of the real and observed states were assigned the following values:
When the time delay is neglected, the observed acceleration of joint 3 is shown in Figure 2. It is shown that there is a slight overshoot at the beginning of motion followed by excellent tracking performance throughout the trajectory.
High and low-gain observers were simulated at different sets of values of the acceleration control gains. The results are shown in Figures 3 and 4. The acceleration errors (Figures 3 and 4) are marginally affected by changing the acceleration controller gains. The higher the acceleration gains the lower the peaks of the estimated acceleration errors. This fact holds true for the two kinds of observers. But our predictions have shown that the high-gain observer is of lower steady state error than the low-gain one. On the other hand, comparing responses in Figure 2 reveals two important facts: i) the low-gain observer exhibits overshoot peaks much higher than the ones provided by the high-gain observer, and ii) the
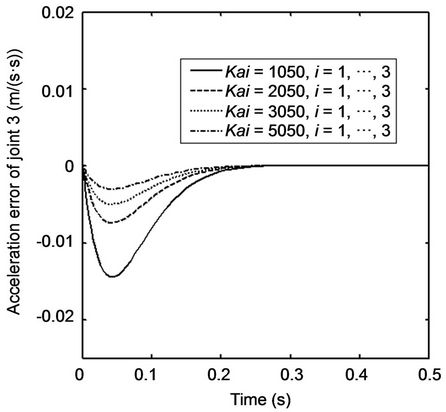
Figure 2. Effects of acceleration controller gains on the observed acceleration.
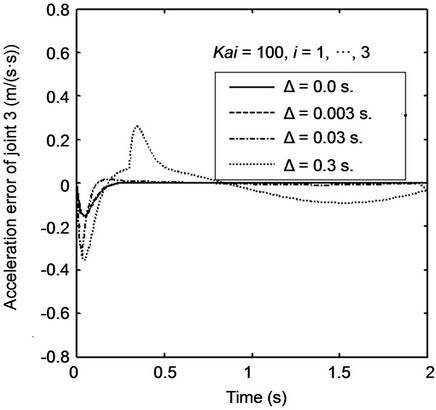
Figure 3. Effects of time delay on the observed acceleration at low acceleration controller gains.
high-gain observer provides faster convergence than the low-gain observer. This puts a robot engineer in place where a choice should be made among solutions of either high-gain or low-gain or moderate-gain observers. Moreover, an attention should be paid to the unmodeled dynamics which can be handled by the sliding term in the observer, if they are bounded. Also, the actuators saturation limits should be paid attention whenever high-gain observers are used. They can easily drive the system unstable if they are not handled carefully.
The effects of time delay on the estimated acceleration errors are shown in Figures 3 and 4 low and high-gain observer used, respectively. The time delay was modeled at the sensor, i.e., there is a lag in receiving the sensor information. For (Δ ≤ 30 ms) nominal values of time
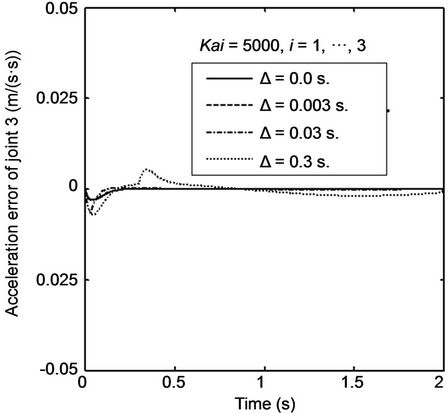
Figure 4. Effects of time delay on the observed acceleration at high acceleration controller gains.
delay less than or equal 30 ms and (Ka = 100) low acceleration gains (Figure 3), the proposed controller and observer behavior remains acceptable. It is also noticeable that the effect of time delay vanishes with (Ka = 5000) higher acceleration controller gains as in Figure 4 for Δ ≤ 30 ms. Using low-gain observer and low acceleration gains makes the effect of time delay much more influential at degrading the observation process.
Now, the worst case scenario for the operation of the observer (24) that is designed not to handle time delays is to use it with low observer gains and low/moderate acceleration controller gains with relatively large output delays. These operating conditions considerably deteriorate the performance of such observer. It is desired now to investigate the performance features of the sequential observer under these worst case scenario operating conditions. Figures 5 and 6 show that the sequential observer is capable of converging to the real values. Comparison Figures 5 and 6 reveals that the larger the time delay the slower is the convergence of the sequential observer to the real values.
5. Conclusion
In this paper, an acceleration controller and sequential observer are derived and successfully implemented in simulation on a Puma 560 robot. The controller is based on joint acceleration feedback. The joint accelerations are constructed using the joint position from encoder measurement. The procedures to derive the Luenberger like observer gains, the sliding term and the sequential term are outlined in the paper. Simulation results show that the combination of sequential observer and acceleration controller are robust to delay changes. Moreover, it is also shown that measurement time delay below certain
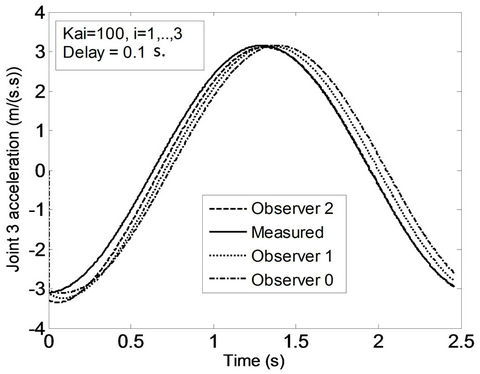
Figure 5. Effects of sequential observation on the estimated acceleration.
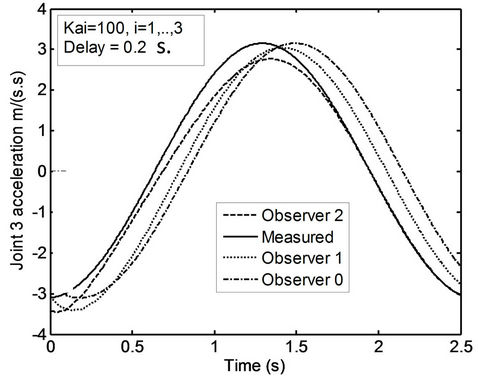
Figure 6. Effects of sequential observation on the estimated acceleration.
level have slight effect on tracking. However, the tracking performance tends to degrade with large time delay where the sequential observer finds most of its impact.
REFERENCES
- J.-P. Richard, “Time-Delay Systems: An Overview of Some Recent Advances and Open Problems,” Automatica, Vol. 39, 2003, pp. 1667-1694. doi:10.1016/S0005-1098(03)00167-5
- S. Ibrir, “Observer-Based Control of a Class of Time Delay Nonlinear Systems Having Triangular Structure,” Automatica, Vol. 47, 2011, pp. 388-394. doi:10.1016/j.automatica.2010.10.052
- S. J. Yoo and J. B. Park, “Decentralized Adaptive OutputFeedback Control for a Class of Nonlinear Large-Scale Systems with Unknown Time-Varying Delayed Interactions,” Information Sciences, Vol. 186, 2012, pp. 222-238. doi:10.1016/j.ins.2011.10.004
- T. Ahmed-Ali, E. Cherrier and M. M’Saad, “Cascade High Gain Observers for Nonlinear Systems with Delayed Output Measurement,” Proceeding of the Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference, Shanghai, 16-18 December 2009, pp. 8226-8231.
- V. Van Assache, T. Ahmed-Ali and C. A. B. Hann, “High Gain Observer for Nonlinear Systems with Time Varying Delayed Measurements,” Proceeding of the 18th IFAC World Congress, Milano, 28 August-2 September 2011, pp. 692-696.
- A. Seuret, T. Floquet, J.-P. Richard and S. Spurgeon, “Observer Design for Systems with Non Small and Unknown Time-Varying Delay,” In: J. J. Loiseau, W. Michiels, S.-I. Niculescu and R. Sipahi, Eds., Topics in Time-Delay Systems: Analysis, Algorithms and Control, Springer Verlag Series in Lecture Notes in Control and Information Sciences, Vol. 388, 2009, pp. 233-242.
- F. Cacace, A. Germanib and C. Manesb, “An Observer for a Class of Nonlinear Systems with Time Varying Observation Delay,” Systems & Control Letters, Vol. 59, 2010, pp. 305-312. doi:10.1016/j.sysconle.2010.03.005
- A. Germani, C. Manes and P. Pepe, “An Asymptotic State Observer for a Class of Nonlinear Delay Systems,” Kybernetika, Vol. 37, No. 4, 2001, pp. 459-478.
- A. Germani, C. Manes and P. Pepe, “A New Approach to State Observation of Nonlinear Systems with Delayed Outputs,” IEEE Transactions on Automatic Control, Vol. 47, 2002, pp. 96-101. doi:10.1109/9.981726
- M. D. Mora, A. Germani and C. Manes, “A State Observer for Nonlinear Dynamical Systems,” Nonlinear Analysis, Theory, Methods & Applications, Vol. 30, 1997, pp. 4485-4496.
- M. D. Mora, A. Germani and C. Manes, “Design of State Observers from a Drift-Observability Property,” IEEE Transactions on Automatic Control, Vol. 45, 2000, pp. 1536-1540. doi:10.1109/9.871767
- G. Ciccarella, M. D. Mora and A. Germani, “A Luenberger-Like Observer for Nonlinear Systems,” International Journal of Control, Vol. 57, 1993, pp. 537-556. doi:10.1080/00207179308934406
- A. S. Zaki, E. M. ElBeheiry and W. H. ElMaraghy, “Variable Structure Observers Design for Flexible-Link Manipulator Control,” Transaction of the CSME/de la SCGM, Vol. 27, No. 1-2, 2003, pp. 107-129.
- E. M. ElBeheiry, A. Zaki and W. H. ElMaraghy, “A Unified Approach for Independent Manipulator Joint Acceleration Control and Observation,” ASME Dynamic Systems and Control Division—DSC, Vol. 72, No. 1, 2003, pp. 659-666.
- W. L. Xu and J. D. Han, “Joint Acceleration Feedback Control for Robots: Analysis, Sensing and Experiments,” Robotics and Computer Integrated Manufacturing, Vol. 16, 2000, pp. 307-320. doi:10.1016/S0736-5845(00)00010-7
- J. D. Han, Y. Q. He and W. L. Xu, “Angular Acceleration Estimation and Feedback Control: An Experimental Investigation,” Mechatronics, Vol. 17, 2007, pp. 524-532. doi:10.1016/j.mechatronics.2007.05.006
- G. L. Luo and G. N. Saridis, “LQ Design of PID Controllers for Robot Arms,” IEEE Journal of Robotics and Automation, Vol. l, 1985, pp. 152-159.
- S. J. Ovaska and S. Valiviita, “Angular Acceleration Measurement: A Review,” Proceedings of the IEEE Conference on Instrumentation and Measurement Technology, St. Paul, 18-21 May 1998, pp. 875-880.
- J. Studenny, P. R. Belanger and L. K. Daneshmend, “A Digital Implementation of the Acceleration Feedback Law on A PUMA 560 Manipulator,” Proceedings of 30th IEEE Conference on Decision and Control, Brighton, 11-13 December 1991, pp. 2639-2648. doi:10.1109/CDC.1991.261831
- P. Chiacchi, L. Sciavicco and B. Siciliano, “Practical Design of Independent Joint Controllers for Industrial Robots,” Proceedings of the American Control Conference, Chicago, 24-26 June 1992, pp. 1239-1240.
- P. B. Schmidt and R. D. Lorenz, “Design Principles and Implementation of Acceleration Feedback to Improve Performance of DC Drives,” Proceeding of the Industry Applications Society Annual Meeting, Seatle, 7-12 October 1990, pp. 422-427.
- A. De Luca, D. Schroder and M. Thummel, “An Acceleration-Based State Observer for Robot Manipulators with Elastic Joints,” Proceedings of the IEEE International Conference on Robotics and Automation, Roma, 10-14 April 2007, pp. 3817-3823. doi:10.1109/ROBOT.2007.364064
- C. J. Tsaprounis and N. A. Aspragathos, “Adaptive Tracking Controller for Rigid-Link Elastic-Joint Robots with Link Acceleration Estimation,” Journal of Intelligent and Robotic Systems, Vol. 27, 2000, pp. 67-83. doi:10.1023/A:1008198029642
- J.-J. E. Slotine, J. K. Hedrick and E. A. Misawa, “On Sliding Observers for Nonlinear Systems,” ASME Transactions, Journal of Dynamic Systems, Measurement and Control, Vol. 109, 1987, pp. 245-252. doi:10.1115/1.3143852
- E. M. El Beheiry and H. A. El Maraghy, “Robotic Manipulator State Observation via One Time Gain Switching,” Journal of Intelligent & Robotic Systems, Vol. 38, No. 3-4, 2003, pp. 313-344. doi:10.1023/B:JINT.0000004972.84871.b5
- K. Jezernik, B. Curk and J. Harnik, “Observer Based Sliding Model Control of Robotic Manipulator,” Robotica, Vol. 12, 1994, pp. 443-448. doi:10.1017/S0263574700017999
- B. Bona and M. Indri, “Analysis and Implementation of Observers for Robotic Manipulators,” Proceedings of the IEEE Conference on Robotic & Automation, Leuven, 16-20 May 1998, pp. 3006-3011.
- J. P. Gauthier, H. Hammouri and S. Othman, “A Simple Observer for Nonlinear Systems: Applications to Bioreactors,” IEEE Transactions on Automatic Control, Vol. 37, 1992, pp. 875-880. doi:10.1109/9.256352
- R. A. Garcia and C. E. D’Attellis, “Nonlinear Observers in Closed Loop Trajectory Tracking,” Proceeding of the 20th IECON International Conference on Industrial Electronics, Control and Instrumentation, Vol. 3, 1994, pp. 1767-1772.
- B. L. Walcott and S. H. Zak, “State Observation of Nonlinear Uncertain Dynamical Systems,” IEEE Transactions on Automatic Control, Vol. 32, 1987, pp. 166-170. doi:10.1109/TAC.1987.1104530
- A. J. Koshkouei and A. S. I. Zinober, “Sliding Mode Observers for a Class of Nonlinear Systems,” Proceeding of the American Control Conference, Anchorage, 7-12 May 2002, pp. 2106-2111.
- A. Isidori, “Nonlinear Control Systems,” 3rd Edition, Springer-Verlag, London, 1995.
- T.-J. Tarn, A. K. Bejczy, X. Yun and Z. Li, “Effect of Motor Dynamics on Nonlinear Feedback Robot Arm Control,” IEEE Transactions on Robotics and Automation, Vol. 7, No. 1, 1991, pp. 114-122. doi:10.1109/70.68075