Open Journal of Optimization
Vol.04 No.01(2015), Article ID:54745,10 pages
10.4236/ojop.2015.41002
A New Filled Function with One Parameter to Solve Global Optimization
Hongwei Lin1, Huirong Li2
1Department of Basic Courses, Jinling Institute of Technology, Nanjing, China
2Department of Mathematic and Computation Application, Shangluo University, Shangluo, China
Email: linhongwei_jt@hotmail.com, lihuirong417@163.com
Copyright © 2015 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 26 February 2015; accepted 16 March 2015; published 18 March 2015
ABSTRACT
In this paper, a new filled function with only one parameter is proposed. The main advantages of the new filled function are that it not only can be analyzed easily, but also can be approximated uniformly by a continuously differentiable function. Thus, a minimizer of the proposed filled function can be obtained easily by using a local optimization algorithm. The obtained minimizer is taken as the initial point to minimize the objective function and a better minimizer will be found. By repeating the above processes, we will find a global minimizer at last. The results of numerical experiments show that the new proposed filled function method is effective.
Keywords:
Global Optimization, Filled Function Method, Smoothing Technique, Global Minimize, Local Minimizer

1. Introduction
Global optimization methods have wide applications in many fields, such as engineering, finance, management, decision science and so on. The task of global optimization is to find a solution with the smallest or largest objective function value. In this paper, we mainly discuss the method to find the global minimizer of the objective function. For some problems with only one minimizer, there are many local optimization methods available, for instance, the steepest decent method, the Newton method, the trust region method and so on. However, many problems include multiple local minimizers, and most of the existing methods will not be applicable to these problems.
The difficulty for global optimization is to escape from the current local minimizer to a better one. One of the most efficient methods to deal with this issue is the filled function method which was proposed by Ge [1] [2] . The generic framework of the filled function method can be described as follows:
1) An arbitrary point is taken as an initial point to minimize the objective function by using a local optimi- zation method, and a minimizer of the objective function is obtained.
2) Based on the current minimizer of the objective function, a filled function is designed and a point near the current minimizer is used as an initial point to further minimize the filled function. As a result, a minimizer of the filled function will be found. This minimizer falls into a better region (called basin) of the original objective function.
3) The minimizer of the filled function obtained in 2 is taken as an initial point to minimize the objective function and a better minimizer of the objective function will be found.
4) By repeating steps 2 and 3, the number of the local minimizers will be gradually reduced, and a global minimizer will be found at last.
Although the filled function method is an efficient global optimization method and different filled functions have been proposed, there are some drawbacks for the existing filled functions, such as more than one para- meters to be controlled, being sensitive to the parameters and ill-condition. For example, the filled functions proposed in [1] [2] contain exponent term or logarithm term which will cause ill-condition problem; the filled functions proposed in [3] [4] are non-smooth functions to which the usual classical local optimization methods can not be used; the filled functions proposed in [1] [5] [6] have more than one parameter which is difficult to adjust. To overcome these shortcomings, a new filled function with only one parameter is presented. Although it is not a smooth function, it can be approximated uniformly by a continuously differentiable function. Thus its minimizer can be easily obtained. Based on this new filled function, a new filled function method is proposed.
The remainder of this paper is organized as follows. Related concepts of the filled function method are given in Section 2. In Section 3, a new filled function is proposed and its properties are analyzed. Furthermore, an ap- proximate function of the proposed filled function is given. Finally, the method for avoiding numerical difficulty is presented. In Section 4, a new filled function method is proposed and the numerical experiments on several test problems are made. Finally, some concluding remarks are drawn in Section 5.
2. The Related Concepts
Consider the following global optimization problem with a box constraint:
where  is a twice continuously differentiable function on
is a twice continuously differentiable function on  and
and . Generally, we
. Generally, we
assume that  has only a finite number of minimizers and the set of the minimizers is denoted as
has only a finite number of minimizers and the set of the minimizers is denoted as
 in
in  (
( is the number of minimizers of
is the number of minimizers of ).
).
Some useful concepts and notations are introduced as follows:
 : A local minimizer of
: A local minimizer of  on
on  found so far;
found so far;
 : Set;
: Set;
 : Set;
: Set;
 : A constant satisfying
: A constant satisfying ;
;
 : A constant satisfying
: A constant satisfying .
.
Assumption. All of the local minimizers of  fall into the interior of
fall into the interior of .
.
Definition 1 The basin [7] of  at an isolated minimizer
at an isolated minimizer  is a connected domain
is a connected domain  which
which
contains , and in which the steepest descent sequences of
, and in which the steepest descent sequences of  starting from any point in
starting from any point in  con-
con-
verge to , while the minimization sequences of
, while the minimization sequences of  starting from any point outside of
starting from any point outside of  doesn’t converge to
doesn’t converge to . Correspondingly, if
. Correspondingly, if  is an isolated maximizer of
is an isolated maximizer of , the basin of
, the basin of  at
at  is defined as the hill of
is defined as the hill of  at
at .
.
It is obvious that if , then
, then . If there is another minimizer
. If there is another minimizer  of
of  and
and
 or
or , then the basin
, then the basin  of
of  at
at  is said to be lower (or higher) than
is said to be lower (or higher) than  of
of
 at.
at.
The first concept of the filled function was introduced by Ge [1] [2] . Since the concept of the filled function was introduced, different filled functions are given (e.g., [8] [9] ). A new concept of the filled function was presented which is easier to understand in [8] . It can be described as follows:
The first concept of the filled function was introduced in [1] .
Definition 2 A function  is said to be a filled function of
is said to be a filled function of  at
at , if it satisfies the following properties:
, if it satisfies the following properties:
1)  is a strict local maximizer of
is a strict local maximizer of  over
over ;
;
2)  has no stationary point in the set
has no stationary point in the set ;
;
3) if the set  is not empty, then there exists a point
is not empty, then there exists a point  such that
such that  is a local minimizer of
is a local minimizer of .
.
Based on definition 2, we present a new filled function with only one parameter in Section 3.
3. A New Filled Function and Its Properties
Assume that a local minimizer  of
of  has been found so far. Consider the following function for pro- blem (P):
has been found so far. Consider the following function for pro- blem (P):
 (1)
(1)
where  is a parameter.
is a parameter.
The following theorems will show that the formula (1) is a filled function which satisfies definition 2.
Theorem 1 Suppose  is a local minimizer of
is a local minimizer of  and
and  is defined by (1), then
is defined by (1), then  is a
is a
strict local maximizer of  for all
for all .
.
Proof. Since  is a local minimizer of
is a local minimizer of , there exists a neighborhood
, there exists a neighborhood  of
of ,
,  such that
such that  for all
for all . For all
. For all ,
,  , one has
, one has
 (2)
(2)
Thus,  is a strict local maximizer of
is a strict local maximizer of . □
. □
Theorem 2 Suppose  is a local minimizer of
is a local minimizer of ,
,  is a point in set
is a point in set , then
, then  is not a stationary
is not a stationary
point of  for all
for all .
.
Proof. Due to , one has
, one has  and
and , so
, so

Namely  is not a stationary point of
is not a stationary point of . □
. □
Theorem 3 Suppose  is a local minimizer of
is a local minimizer of  but not a global minimizer of
but not a global minimizer of , which means
, which means  is not empty, then there exists a point
is not empty, then there exists a point  such that
such that  is a local minimizer of
is a local minimizer of  when
when .
.
Proof. Since  is a local minimizer of
is a local minimizer of , and
, and  is not a global minimizer of
is not a global minimizer of , there exists
, there exists
another local minimizer  of
of  such that
such that .
.
By the definition of  and continuity of
and continuity of , there exists a point
, there exists a point  in rectangular area
in rectangular area , such that
, such that
 (3)
(3)
So
 (4)
(4)
By  is a local minimizer of
is a local minimizer of , there exists a point
, there exists a point  such that
such that  ,
,
Then, there exists a point  which is a
which is a
minimizer of .
.
Furthermore, by the Theorem 2, one has . Consequently, Theorem 3 is true. □
. Consequently, Theorem 3 is true. □
From Theorem 1, 2 and 3, we know that if there is a better local minimizer  of
of  than
than , then there exists a point
, then there exists a point  which is minimizer of
which is minimizer of . It falls into a lower basin. These mean that if one minimizes
. It falls into a lower basin. These mean that if one minimizes  with initial point
with initial point , a better minimizer of
, a better minimizer of  will be found.
will be found.
We can find that if  is not a global minimizer of the objective function, then
is not a global minimizer of the objective function, then  is non-diff- erentiable at some point in
is non-diff- erentiable at some point in . Gradient-based algorithms for local optimization cannot be used to obtain the minimizer of
. Gradient-based algorithms for local optimization cannot be used to obtain the minimizer of . A smoothing technique [10] to approximate
. A smoothing technique [10] to approximate  is employed here as follows.
is employed here as follows.
Let
 (5)
(5)
where  is a positive parameter. It is obvious that
is a positive parameter. It is obvious that  is a differentiable. Further, because
is a differentiable. Further, because

and

we have that the inequality
 (6)
(6)
holds. From above discussion, we can see that  uniformly converges to
uniformly converges to  as
as  tends
tends
to infinity. Therefore, by selecting a sufficiently large , the minimization of
, the minimization of  can be replaced by
can be replaced by
 (7)
(7)
In order to obtain a more precise minimizer of  by solving
by solving ,
,  in
in  should be large enough. However, if the value of p is too large, it will cause the overflow of the function values
should be large enough. However, if the value of p is too large, it will cause the overflow of the function values . To prevent the occurrence of this situation, a shrinkage factor r is introduced to
. To prevent the occurrence of this situation, a shrinkage factor r is introduced to  as follows.
as follows.
First of all, it is necessary to estimate  and give a fixed and sufficiently large
and give a fixed and sufficiently large 
(e.g., take it as ) which guarantees that the
) which guarantees that the  accurately approximates to
accurately approximates to .
.
Then, in order to prevent the difficulty of numerical computation, a large  can be taken. Finally,
can be taken. Finally,
 can be rewritten as
can be rewritten as
 (8)
(8)
By doing so, the existing shortcomings can be overcome.
4. A New Filled Function Algorithm and Numerical Experiments
4.1. A New Filled Function Algorithm
Based on the theorems and discussions in the previous section, a new filled function algorithm for finding a global minimizer of  will be proposed, and then some explanations on the algorithm will be given. The details are as follows.
will be proposed, and then some explanations on the algorithm will be given. The details are as follows.
Step 1 (Initialization). Choose the initial values  (e.g.,
(e.g., ), a shrinkage factor
), a shrinkage factor  (e.g.,
(e.g., ), a lower bound of A (denote it as Lba), sufficiently large p and
), a lower bound of A (denote it as Lba), sufficiently large p and . Some directions
. Some directions 
are also given in advance, where  and
and ,
,  ,
,  is
is
the dimension of the optimization problems. Set .
.
Step 2 Minimize  starting from an initial point
starting from an initial point  and obtain a minimizer
and obtain a minimizer  of
of .
.
Step 3 Construct

Set .
.
Step 4 If , then set
, then set  and go to Step 5; otherwise, go to Step 6.
and go to Step 5; otherwise, go to Step 6.
Step 5 Use  as an initial point for minimization of
as an initial point for minimization of , if the minimization sequences of
, if the minimization sequences of  go out of
go out of , set
, set  and go back to Step 4; Otherwise, a minimizer
and go back to Step 4; Otherwise, a minimizer  of
of  will be found in
will be found in  and set
and set ,
,  ,
,  and go back to Step 2.
and go back to Step 2.
Step 6 If , the algorithm stops and
, the algorithm stops and  is taken as the global minimizer of
is taken as the global minimizer of ; Otherwise, decrease
; Otherwise, decrease  by setting
by setting , go to Step 3;
, go to Step 3;
Before we go to the experiments, we have to give some explanations on the above filled function algorithm.
1) In minimization of  and
and , we need to select a local optimization method first. In the pro- posed algorithm, the trust region method is employed.
, we need to select a local optimization method first. In the pro- posed algorithm, the trust region method is employed.
2) In Step 4, the smaller  is needed to select accurately, in our algorithm, the
is needed to select accurately, in our algorithm, the  is selected to guarantee
is selected to guarantee
 is greater than a threshold (e.g., take the threshold as
is greater than a threshold (e.g., take the threshold as ).
).
3) Step 5 means that if a local minimizer  of
of  is found in
is found in  and with
and with , then a
, then a
better local minimizer of  will be obtained by using
will be obtained by using  as the initial point to minimize
as the initial point to minimize .
.
4.2. Numerical Experiment
In this section, the proposed algorithm is tested on some benchmark problems taken from some literatures.
Problem 1. (Two-dimensional function)

where . The global minimum solution satisfies
. The global minimum solution satisfies  for all
for all .
.
Problem 2. (Three-hump back camel function)

The global minimum solution is  and
and .
.
Problem 3. (Six-hump back camel function)

The global minimum solution is  or
or , and
, and  .
.
Problem 4. (Treccani function)

The global minimum solution are  and
and  and
and .
.
Problem 5. (Goldstein and Price function function)
where , and
, and
 . The global minimum solution is
. The global minimum solution is
 and.
and.
Problem 6. (Two-dimensional Shubert function)

This function has 760 minimizers in total. The global minimum value is .
.
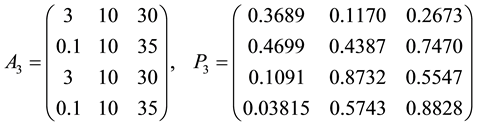
Problem 7. (Hartman function)
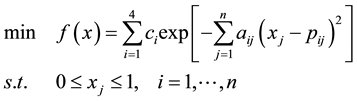
where  is the
is the  th element of vector
th element of vector ,
,  and
and  are the elements at the
are the elements at the  th row and the
th row and the  th column of matrices
th column of matrices  and
and , respectively.
, respectively.

for ,
,
The known global minimizer is  so far.
so far.
For ,
,


The known global minimizer is  so far.
so far.
Enerally, in order to illustrate the performance of the filled function method, it is necessary to record the total number of function evaluations of  and
and  until the algorithm terminates. The numerical results of the proposed algorithm are summarized in Table 1 for the above 7 problems.
until the algorithm terminates. The numerical results of the proposed algorithm are summarized in Table 1 for the above 7 problems.
Additionally, the proposed algorithm is compared with the algorithm presented in [11] . A series of minimizers obtained by the above two algorithms are recorded in Tables 2-14 for all testing problems.
Some symbols used in the following tables are given firstly.
 : The initial point which satisfies
: The initial point which satisfies .
.
 : An approximate global minimizer obtained by the proposed algorithm.
: An approximate global minimizer obtained by the proposed algorithm.
 : The total number of function evaluations of
: The total number of function evaluations of  and
and  until the algorithm terminates.
until the algorithm terminates.
The initial value of  is taken as 1 for all problems.
is taken as 1 for all problems.
 : The iteration number in finding the
: The iteration number in finding the  th local minimizer of the objective function;
th local minimizer of the objective function;
 : The
: The  th local minimizer;
th local minimizer;
 : The function value of
: The function value of 
 : The algorithm proposed in this paper;
: The algorithm proposed in this paper;

Table 1. Numerical results of all testing problems.
Table 2. Computational results for problem 1 with .
.
Table 3. Computational results for problem 1 with .
.
Table 4. Computational results for problem 1 with .
.
Table 5. Computational results for problem 2 with initial point .
.
Table 6. Computational results for problem 2 with initial point .
.
Table 7. Computational results for problem 3 with initial point .
.
 : The algorithm proposed in reference [11] .
: The algorithm proposed in reference [11] .
According to the Tables 2-13, we will find that our algorithm is effective, and it is affected by the initial va- lue of  and the selection of
and the selection of . The larger initial value of
. The larger initial value of , the less local minimizer will be found and
, the less local minimizer will be found and
Table 8. Computational results for problem 3 with initial point .
.
Table 9. Computational results for problem 3 with initial point .
.
Table 10. Computational results for problem 4.
Table 11. Computational results for problem 5.
Table 12. Computational results for problem 6.
Table 13. Computational results for problem 7.
Table 14. Computational results for problem 7 with .
.
also the lower computation cost will be; meanwhile, if the function value of the current local minimizer is closed to that of the global minimizer, then the sufficiently small  is necessary, while a relatively large initial value of
is necessary, while a relatively large initial value of  will cause increasing of number of iterations. Therefore, the initial value of
will cause increasing of number of iterations. Therefore, the initial value of  and
and  are needed to be selected accurately. The selection of
are needed to be selected accurately. The selection of  ensure the accuracy of the global minimizer, so that the sufficiently small
ensure the accuracy of the global minimizer, so that the sufficiently small  and appropriate small initial
and appropriate small initial  should be selected or
should be selected or  contained in the algorithm is taken as small as possible.
contained in the algorithm is taken as small as possible.
5. Concluding Remarks
The filled function method is a kind of efficient approaches for the global optimization. The existing filled func- tions have some drawbacks, for example, some are non-differentiable functions, some contain more than one adjust parameter and some contain ill-condition terms and so on. These drawbacks may result in failure or diff- iculty of the algorithm in searching global optimal solution. In order to overcome these shortcomings, a new filled function with only one parameter is proposed in this paper. Although the proposed filled function is non- differentiable at some points, it can be approximated uniformly by a continuous differentiable function. The inherent shortcomings of the approximate function can be eliminated by simple treatment. The effectiveness of the new filled function method is demonstrated by numerical experiments on some testing optimization pro- blems.
Acknowledgements
This work was supported by the National Nature Science Foundation of China (No. 11161001, No. 61203372, No. 61402350, No. 61375121), The Research Foundation of Jinling Institute of Technology (No. jit-b-201314 and No. jit-n-201309) and Ningxia Foundation for key disciplines of Computational Mathematics.
References
- Ge, R.P. (1990) A Filled Function Method for Finding a Global Minimizer of a Function of Several Variables. Mathematical Programming, 46, 191-204. http://dx.doi.org/10.1007/BF01585737
- Ge, R.P. (1987) The Theory of Filled Function Method for Finding Global Minimizers of Nonlinearly Constrained Minimization Problems. Journal of Computational Mathematics, 5, 1-9.
- Wang, X.L. and Zhou, G.B. (2006) A New Filled Function for Unconstrained Global Optimization. Applied Mathematics and Computation, 174, 419-429. http://dx.doi.org/10.1016/j.amc.2005.05.009
- Wang, Y.-J. and Zhang, J.-S. (2008) A New Constructing Auxiliary Function Method for Global Optimization. Mathematical Computer Modeling, 47, 1396-1410. http://dx.doi.org/10.1016/j.mcm.2007.08.007
- Liu, X. and Xu, W. (2004) A New Filled Function Applied to Global Optimization. Computer and Operation Research, 31, 61-80. http://dx.doi.org/10.1016/S0305-0548(02)00154-5
- Liu, X. (2004) The Barrier Attribute of Filled Functions. Applied Mathematics and Computation, 149, 641-649. http://dx.doi.org/10.1016/S0096-3003(03)00168-1
- Dixon, L.C.W., Gomulka, J. and Herson, S.E. (1976) Reflections on Global Optimization Problem, Optimization in Action. Academic Press, New York, 398-435.
- Liang, Y.M., Zhang, L.S., Li, M.M. and Han, B.S. (2007) A Filled Function Method for Global Optimization. Journal of Computational and Applied Mathematics, 205, 16-31. http://dx.doi.org/10.1016/j.cam.2006.04.038
- Ling, A.-F., Xu, C.-X. and Xua, F.-M. (2008) A Discrete Filled Function Algorithm for Approximate Global Solutions of Max-Cut Problems. Journal of Computational and Applied Mathematics, 220, 643-660. http://dx.doi.org/10.1016/j.cam.2007.09.012
- Polak, E., Royset, J.O. and Womersley, R.S. (2003) Algorithms with Adaptive Smoothing for Finite Minimax Problems. Journal of Optimization Theory and Applications, 119, 459-484. http://dx.doi.org/10.1023/B:JOTA.0000006685.60019.3e
- Zhang, L.-S., Ng, C.-K., Li, D. and Tian, W.-W. (2004) A New Filled Function Method for Global Optimization. Journal of Global Optimization, 28, 17-43. http://dx.doi.org/10.1023/B:JOGO.0000006653.60256.f6