International Journal of Modern Nonlinear Theory and Application
Vol.03 No.02(2014), Article ID:46276,7 pages
10.4236/ijmnta.2014.32005
Chaotic Control of Lü System via Three Methods
Mingjun Wang
School of Information Engineering, Dalian University, Dalian, China
Email: wmjhome@163.com
Copyright © 2014 by author and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 21 March 2014; revised 21 April 2014; accepted 26 April 2014
ABSTRACT
In the paper, several different methods are adopted to control Lü system. With direct feedback method, Lü system can be stabilized at one equilibrium point or a limit cycle surrounding its equilibrium. With adaptive time-delayed feedback method, feedback coefficient and delay time can be adjusted adaptively to stabilize Lü system at its original unstable periodic orbit. With minimal energy method, Lü system can also be stabilized at fixed point or limit cycle. Numerical simulations show the effectiveness of our methods.
Keywords:
Lü System, Direct Feedback, Adaptive Time-Delayed Feedback, Minimal Energy Method

1. Introduction
In 1990, Ott, Grebogi and Yorke presented the OGY method to control chaos [1] . After their pioneering work, chaotic control has become a focus in nonlinear problems and a lot of work has been done in the field [2] -[4] . Nowadays, many methods have been proposed to control chaos [5] [6] . Generally speaking, there are two kinds of control ways: feedback control and nonfeedback control [7] -[14] . Feedback methods are used to stabilize the unstable periodic orbit of chaotic systems by feeding back their states. Nonfeedback methods are adopted to change chaotic behaviors by applying perturbations to some parameters or variables. In the paper, we use several different methods to control the dynamic behavior of Lü system. With direct feedback method, Lü system can be stabilized at equilibrium point or limit cycle around its equilibrium. With adaptive time-delayed feedback method, Lü system can be stabilized at its original unstable periodic orbit. With minimal energy method (it’s a nonfeedback method), Lü system can also be stabilized at fixed point or limit cycle, though the fixed point or the center of the limit cycle is not its original equilibrium. Numerical simulations show the effectiveness of these methods.
2. The Description of Lü System
The unified chaotic system [15] is described as
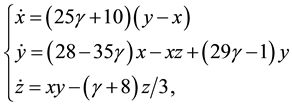 (1)
(1)
where . When
. When , system (1) belongs to Lorenz chaotic system [16] ; when
, system (1) belongs to Lorenz chaotic system [16] ; when , system (1) belongs to Chen chaotic system [17] ; when
, system (1) belongs to Chen chaotic system [17] ; when , system (1) belongs to Lü chaotic system [18] .
, system (1) belongs to Lü chaotic system [18] .
Obviously, Lü system is a bridge between Lorenz system and Chen system, so the study of Lü system is very significant. Let , then system (1) is described as
, then system (1) is described as
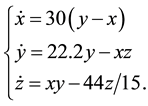 (2)
(2)
System (2) is a typical Lü system. The attractor is shown in Figure 1 and the relevant projections of this attractor are shown in Figure 2.
There are close relationships between system (2) and a large class of chaotic systems (i.e. generalized Lorenz system family [19] ), so it’s very meaningful to study the chaotic control of system (2). Next, direct feedback method, adaptive time-delayed feedback method and minimal energy method will be adopted to control this typical Lü system respectively.
3. The Chaotic Control of Lü System with Three Methods
3.1. Direct Feedback Method
System (2) has three equilibriums, i.e.,  ,
,  and
and .
.

Figure 1. The chaotic attractor of Lü system.
 (a) (b) (c)
(a) (b) (c)
Figure 2. The projections of Lü attractor.
Suppose we want to stabilize Lü system at equilibrium S1 and the limit cycle surrounding S1 respectively. For convenience, choose y as feedback variable, this feedback is added to the second function of Equation (2), then the controlled Lü system can be described as
 (3)
(3)
where k is feedback coefficient. The Jacobian matrix of system (3) at  is
is
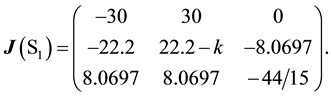 (4)
(4)
Suppose  as eigenvalue, then the characteristic equation of Equation (4) is
as eigenvalue, then the characteristic equation of Equation (4) is
 , (5)
, (5)
where ,
,  ,
, .
.
According to Routh-Hurwitz criterion, when ,
,  ,
,  and
and , the real parts of all the eigenvalues of Equation (4) are negative, then system (3) will be stabilized at
, the real parts of all the eigenvalues of Equation (4) are negative, then system (3) will be stabilized at . It’s easy to obtain the solution
. It’s easy to obtain the solution . Choose
. Choose , the numerical simulations of system (3) are shown in Figure 3.
, the numerical simulations of system (3) are shown in Figure 3.
Choose the critical value , the eigenvalues of Equation (4) are 16.4365j, −16.4365j and −16.2644, system (3) is a limit cycle surrounding S1, the numerical simulations are shown in Figure 4.
, the eigenvalues of Equation (4) are 16.4365j, −16.4365j and −16.2644, system (3) is a limit cycle surrounding S1, the numerical simulations are shown in Figure 4.
In the same way, Lü system can be stabilized at S0 or S2, or the relevant limit cycle surrounding S0 or S2. From numerical simulations, we see that Lü system may exhibit periodic behavior with the direct feedback method, but the profile of the original chaotic Lü attractor disappears under this control method. Next, an adaptive
 (a) (b) (c)
(a) (b) (c)
Figure 3. When k = 6, system (3) converges to S1.
 (a) (b) (c)
(a) (b) (c)
Figure 4. When k = 5.5311, system (3) becomes a limit cycle surrounding S1.
time delayed feedback method will be adopted to control Lü system, and the periodic orbit of the controlled system can maintain the profile of the original Lü attractor.
3.2. Adaptive Time-Delayed Feedback Method
In the time-delayed feedback method, the feedback signal can be described as [20]
 , (6)
, (6)
where K is feedback coefficient;  is delay time; X is measurable variable. In practical applications, it’s important to choose proper K and
is delay time; X is measurable variable. In practical applications, it’s important to choose proper K and . K and
. K and  can be obtained by experiments and calculation. Pyragas has discussed about how to choose K and
can be obtained by experiments and calculation. Pyragas has discussed about how to choose K and  detailedly [20] . As for non-autonomous system, we can choose the period of external force as
detailedly [20] . As for non-autonomous system, we can choose the period of external force as ; As for autonomous system, the calculation of K and
; As for autonomous system, the calculation of K and  is very tedious. Many numerical calculation results show that the available range of K is very small and it’s not easy to obtain the optimal solution of K. Though people have done a lot of work [21] -[23] in this field, how to find available K and
is very tedious. Many numerical calculation results show that the available range of K is very small and it’s not easy to obtain the optimal solution of K. Though people have done a lot of work [21] -[23] in this field, how to find available K and  quickly and effectively is still an unresolved problem.
quickly and effectively is still an unresolved problem.
In the paper, we choose an adaptive algorithm to obtain proper feedback coefficient K and delay time . Suppose the controlled Lü system as
. Suppose the controlled Lü system as
 (7)
(7)
where the controller , then we can realize dynamic regulation of feedback coefficient k and delay time
, then we can realize dynamic regulation of feedback coefficient k and delay time  by the following algorithm.
by the following algorithm.
As for feedback coefficient k, let , where weight coefficient
, where weight coefficient , obviously k can be dynamically adjusted by the error; as for delay time
, obviously k can be dynamically adjusted by the error; as for delay time , we choose
, we choose  as the time interval between two adjacent maximum of z, i.e.
as the time interval between two adjacent maximum of z, i.e. , where
, where  means z reaches its nth maximum at
means z reaches its nth maximum at .
.
In numerical simulations, choose time step 0.001 second, let initial state  and
and , the attractor of system (7) is shown in Figure 5, the projections of system (7)’s attractor are shown in Figure 6. From Figure 5 and Figure 6, we can see that Lü system has been stabilized at its original unstable periodic orbit successfully.
, the attractor of system (7) is shown in Figure 5, the projections of system (7)’s attractor are shown in Figure 6. From Figure 5 and Figure 6, we can see that Lü system has been stabilized at its original unstable periodic orbit successfully.
The simulation results of feedback coefficient k and delay time  are shown in Figure 7(a) and Figure 7(c). Figure 7(b) is part of Figure 7(a) with time from 45 sec to 60 sec. The simulation results of x, y, z with time from 45 sec to 60 sec are shown in Figure 8. From these simulation results, we can know that
are shown in Figure 7(a) and Figure 7(c). Figure 7(b) is part of Figure 7(a) with time from 45 sec to 60 sec. The simulation results of x, y, z with time from 45 sec to 60 sec are shown in Figure 8. From these simulation results, we can know that  becomes stable at 0.365 second lastly; the period of z is
becomes stable at 0.365 second lastly; the period of z is , and the period of x and y is
, and the period of x and y is , so the period of system (7) is
, so the period of system (7) is . Generally speaking, feedback coefficient is a constant, while in this paper, the coefficient k changes periodically under the adaptive time-delayed feedback control, which shows that when the period of feedback coefficient equals that of the controlled system, chaotic control may also be realized.
. Generally speaking, feedback coefficient is a constant, while in this paper, the coefficient k changes periodically under the adaptive time-delayed feedback control, which shows that when the period of feedback coefficient equals that of the controlled system, chaotic control may also be realized.
3.3. Minimal Energy Method
For physical systems, less energy means more stability, so reducing energy is an effective method to control

Figure 5. The attractor of system (7) under the adaptive time-delayed feedback control.
 (a) (b) (c)
(a) (b) (c)
Figure 6. The projections of system (7)’s attractor under the adaptive time-delayed feedback control.
 (a) (b) (c)
(a) (b) (c)
Figure 7. The simulation results of feedback coefficient k and delay time τ.
 (a) (b) (c)
(a) (b) (c)
Figure 8. The simulation results of x, y, z.
chaos. Generally speaking, when the energy of a chaotic system is reduced to a critical value, the system may behave period. According to this idea, we can design a strategy to stabilize Lü system at periodic orbits. For a chaotic system, it’s not easy to calculate its energy, but a generalized energy function can be used to instead of true energy. In many cases, Lyapunov function can be seemed as a generalized energy function. By calculation, the average energy  can be obtain (
can be obtain ( is the average value of the Lyapunov function), then we can choose
is the average value of the Lyapunov function), then we can choose , adjust some variable(s) of this system so that the energy is no more than
, adjust some variable(s) of this system so that the energy is no more than . Choose proper
. Choose proper , then the controlled chaotic system may be stabilized at periodic orbits.
, then the controlled chaotic system may be stabilized at periodic orbits.
As for system (2), choose the generalized energy function as
 . (8)
. (8)
By calculation, we have the average value . Suppose y is adjustable, we adopt the following strategy to control system (2): when
. Suppose y is adjustable, we adopt the following strategy to control system (2): when , no control is required; when
, no control is required; when  and
and , if
, if , then
, then
 ,
,
and if , then
, then
 .
.
From simulation results we can see that the strategy is available to control system (2). Figure 9 and Figure 10 show the simulation results with different . From Figure 9 and Figure 10, we can see that with minimal energy method, Lü system can be stabilized at fixed point and periodic orbits.
. From Figure 9 and Figure 10, we can see that with minimal energy method, Lü system can be stabilized at fixed point and periodic orbits.
4. Conclusions
We study the chaotic control of Lü system with several different methods. In the direct feedback scheme, Lü system is stabilized at equilibrium point and limit cycle successfully. In the adaptive time-delayed feedback scheme, feedback coefficient and delay time can be adjusted adaptively to stabilize Lü system at one of its original periodic orbits. In the minimal energy method, Lü system can be guided to fixed point and periodic orbits too. Numerical simulations show the effectiveness of our methods.
Direct feedback is the most common method for chaotic control. With linear or nonlinear, single-variable or multiple-variable feedback, it is available to the control of almost all chaotic systems, even multi-scroll systems [24] [25] and high-dimension systems. In the paper, we use this method to stabilize Lü system at its equilibrium or a limit cycle around its equilibrium. In the case, this method is based on Lyapunov stability theory, and the exact function of the system should be known before designing the control scheme. By the way, it’s hard to use the other two methods in the paper to stabilize a chaotic system at its original equilibrium because the equilibrium will be changed in the other two methods.
 (a) (b) (c)
(a) (b) (c)
Figure 9. The simulation results of controlled system (2) with Em = 600.
 (a) (b) (c)
(a) (b) (c)
Figure 10. The simulation results of controlled system (2) with Em = 760.
On the contrary, we don’t require the detailed information of chaotic systems in our adaptive time-delayed feedback method. Feedback coefficient and delay time can be adjusted adaptively during the control process. In order to realize the control of complex chaotic systems, such as multi-scroll systems [24] [25] or high-dimension systems, the feedback can also involve multiple variables, and the period of the controlled system will be a common multiple of the period of every variable.  can be seemed as the fixed feedback form of our adaptive method, but numerical simulations are indispensable to verify a concrete adaptive control scheme effective or not.
can be seemed as the fixed feedback form of our adaptive method, but numerical simulations are indispensable to verify a concrete adaptive control scheme effective or not.
As long as some variable(s) can be adjusted, the chaotic system may be controlled by minimal energy method. However, this method also depends on simulations. For a special chaotic system, proper  can only be obtained by simulations. Even though, fortunately, by numerical simulations, we find that the available range of
can only be obtained by simulations. Even though, fortunately, by numerical simulations, we find that the available range of  is very large.
is very large.
Acknowledgements
The work was supported by Doctor Specific Funds of Dalian University.
References
- Ott, E., Grebogi, C. and Yorke, J.A. (1990) Controlling Chaos. Physical Review Letters, 64, 1196-1199. http://dx.doi.org/10.1103/PhysRevLett.64.1196
- Chen, G. and Dong, X. (1998) From Chaos to Order: Methodologies, Perspectives and Applications. World Scientific, Singapore.
- Wang, G.R., Yu, X.L. and Chen, S.G. (2001) Chaotic Control, Synchronization and Utilizing. National Defence Industry Press, Beijing.
- Guan, X.P., Fan, Z.P., Chen, C.L. and Hua, C.C. (2002) Chaotic Control and Its Application on Secure Communication. National Defence Industry Press, Beijing.
- Chen, G.R. and Lü, J.H. (2003) Dynamical Analyses, Control and Synchronization of the Lorenz System Family. Science Press, Beijing.
- Wang, X.Y. (2003) Chaos in the Complex Nonlinearity System. Electronics Industry Press, Beijing.
- Roopaei, M., Sahraei, B.R. and Lin, T.C. (2010) Adaptive Sliding Mode Control in a Novel Class of Chaotic Systems. Communications in Nonlinear Science and Numerical Simulation, 15, 4158-4170. http://dx.doi.org/10.1016/j.cnsns.2010.02.017
- Zhang, L.P. and Jiang, H.B. (2011) Impulsive Generalized Synchronization for a Class of Nonlinear Discrete Chaotic Systems. Communications in Nonlinear Science and Numerical Simulation, 16, 2027-2032. http://dx.doi.org/10.1016/j.cnsns.2010.07.022
- Sorrentino, F. and DeLellis, P. (2012) Estimation of Communication-Delays through Adaptive Synchronization of Chaos. Chaos, Solitons & Fractals, 45, 35-46. http://dx.doi.org/10.1016/j.chaos.2011.09.004
- Shi, X.R. and Wang, Z.L. (2009) Adaptive Added-Order Anti-Synchronization of Chaotic Systems with Fully Unknown Parameters. Applied Mathematics and Computation, 215, 1711-1717. http://dx.doi.org/10.1016/j.amc.2009.07.023
- Chen, Y., Li, M.Y. and Cheng, Z.F. (2010) Global Anti-Synchronization of Master-Slave Chaotic Modified Chua’s Circuits Coupled by Linear Feedback Control. Mathematical and Computer Modelling, 52, 567-573. http://dx.doi.org/10.1016/j.mcm.2010.03.056
- Yang, X.S., Zhu, Q.X. and Huang, C.X. (2011) Generalized Lag-Synchronization of Chaotic Mix-Delayed Systems with Uncertain Parameters and Unknown Perturbations. Nonlinear Analysis: Real World Applications, 12, 93-105. http://dx.doi.org/10.1016/j.nonrwa.2010.05.037
- Wang, Q.Y., Lu, Q.S. and Duan, Z.S. (2010) Adaptive Lag Synchronization in Coupled Chaotic Systems with Unidirectional Delay Feedback. International Journal of Nonlinear Mechanics, 45, 640-646. http://dx.doi.org/10.1016/j.ijnonlinmec.2009.01.001
- An, X.L., Yu, J.N. and Li, Y.Z. (2011) Design of a New Multistage Chaos Synchronized System for Secure Communications and Study on Noise Perturbation. Mathematical and Computer Modelling, 54, 7-18. http://dx.doi.org/10.1016/j.mcm.2011.01.020
- Lü, J., Chen, G., Cheng, D. and Čelikovskỳ, S. (2002) Bridge the Gap between the Lorenz System and the Chen System. International Journal of Bifurcation and Chaos, 12, 2917-2926. http://dx.doi.org/10.1142/S021812740200631X
- Lorenz, E.N. (1963) Deterministic Nonperiodic Flow. Journal of the Atmospheric Sciences, 20, 130-141. http://dx.doi.org/10.1175/1520-0469(1963)020<0130:DNF>2.0.CO;2
- Chen, G. and Ueta, T. (1999) Yet Another Chaotic Attractor. International Journal of Bifurcation and Chaos, 9, 1465-1466. http://dx.doi.org/10.1142/S0218127499001024
- Lü, J. and Chen, G. (2002) A New Chaotic Attractor Coined. International Journal of Bifurcation and Chaos, 12, 659-661. http://dx.doi.org/10.1142/S0218127402004620
- Čelikovskỳ, S. and Chen, G. (2002) On a Generalized Lorenz Canonical Form of Chaotic Systems. International Journal of Bifurcation and Chaos, 12, 1789-1812.
- Pyragas, K. (1992) Continuous Control of Chaos by Self-Controlling Feedback. Physics Letters A, 170, 421-428. http://dx.doi.org/10.1016/0375-9601(92)90745-8
- Pyragas, K. and Tamasiavicius, A. (1993) Experimental Control of Chaos by Delayed Self-Controlling Feedback. Physics Letters A, 180, 99-102. http://dx.doi.org/10.1016/0375-9601(93)90501-P
- Hikihara, T. and Kawagoshi, T. (1996) An Experimental Study on Stabilization of Unstable Periodic Motion in Magneto-Elastic Chaos. Physics Letters A, 211, 29-36. http://dx.doi.org/10.1016/0375-9601(95)00925-6
- Bielawski, S., Derozier, D. and Glorieux, P. (1994) Controlling Unstable Periodic Orbits by a Delayed Continuous Feedback. Physical Review E, 49, 971-974. http://dx.doi.org/10.1103/PhysRevE.49.R971
- Lü, J. and Chen, G. (2006) Generating Multiscroll Chaotic Attractors: Theoreis, Methods and Applications. International Journal of Bifurcation and Chaos, 16, 775-858. http://dx.doi.org/10.1142/S0218127406015179
- Lü, J., Han, F., Yu, X. and Chen, G. (2004) Generating 3-D Multi-Scroll Chaotic Attractors: A Hysteresis Series Switching Method. Automatica, 40, 1677-1687. http://dx.doi.org/10.1016/j.automatica.2004.06.001