Journal of Applied Mathematics and Physics
Vol.1 No.7(2013), Article ID:40717,11 pages DOI:10.4236/jamp.2013.17002
Discrete Singular Convolution Method for Numerical Solutions of Fifth Order Korteweg-De Vries Equations
Department of Mathematics and Applied Mathematics, University of Pretoria, Pretoria, South Africa
Email: eben.mare@up.ac.za
Copyright © 2013 Edson Pindza, Eben Maré. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received October 7, 2013; revised November 7, 2013; accepted November 15, 2013
Keywords: Fifth Order Korteweg-De Vries Equations; Discrete Singular Convolution; Exponential Time Discretization Method; Soliton Solutions; Conservation Laws
ABSTRACT
A new computational method for solving the fifth order Korteweg-de Vries (fKdV) equation is proposed. The nonlinear partial differential equation is discretized in space using the discrete singular convolution (DSC) scheme and an exponential time integration scheme combined with the best rational approximations based on the Carathéodory-Fejér procedure for time discretization. We check several numerical results of our approach against available analytical solutions. In addition, we computed the conservation laws of the fKdV equation. We find that the DSC approach is a very accurate, efficient and reliable method for solving nonlinear partial differential equations.
1. Introduction
The study of travelling wave solutions of nonlinear partial differential equations (PDEs) is the major subject in many fields of physical and nonlinear sciences. Concepts like solitons, peakons, kinks, breathers, cusps and compactons have entered into various branches of natural sciences such as chemistry, biology, mathematics, communication and particularly in almost all branches of physics like the fluid dynamics, plasma physics, field theory, nonlinear optics and condensed matter physics. Among these nonlinear PDEs there exists an important class of the fifth order Korteweg-de Vries equations
 (1)
(1)
where 
 ,
,  and
and  are real numbers. This class includes the well-known Lax [1], Sawada-Kotera (SK) [2], Kaup-Kupershmidt (KK) [3] and Ito [4] equations. The knowledge of close form solutions of nonlinear PDEs facilitates the verification of numerical solvers, aids physicists to better understand the mechanism that governs the physic models, provides knowledge to the physical problem, provides possible applications and helps mathematicians in the stability analysis of solutions. While strange attractors and chaos theory give us a better understanding of the erratic and often unpredictable nature of natural phenomena, and soliton theory helps explain natural phenomena that are surprisingly predictable and regular even under conditions that would normally destroy such properties. A soliton is a solitary wave which preserves its shape and velocity after nonlinearly interacting with other solitary waves or (arbitrary) localized disturbances.
are real numbers. This class includes the well-known Lax [1], Sawada-Kotera (SK) [2], Kaup-Kupershmidt (KK) [3] and Ito [4] equations. The knowledge of close form solutions of nonlinear PDEs facilitates the verification of numerical solvers, aids physicists to better understand the mechanism that governs the physic models, provides knowledge to the physical problem, provides possible applications and helps mathematicians in the stability analysis of solutions. While strange attractors and chaos theory give us a better understanding of the erratic and often unpredictable nature of natural phenomena, and soliton theory helps explain natural phenomena that are surprisingly predictable and regular even under conditions that would normally destroy such properties. A soliton is a solitary wave which preserves its shape and velocity after nonlinearly interacting with other solitary waves or (arbitrary) localized disturbances.
In general, Equation (1) does not admit exact solutions, therefore one has to resort to numerical methods. Due to the fifth-order terms in these equations, it is very difficult to compute the solutions of these equations accurately and efficiently. Recently, Shen [5] proposed a new dualPetrov-Galerkin method for the third and higher oddorder equations. His approach was proven to be very effective for the KdV type equations in bounded domains [5] and in semi-infinite intervals [6]. In [7], a numerical scheme based on the dual-Petrov-Galerkin method was proposed and implemented for the Kawahara and modified Kawahara equations.
In this paper, we propose a discrete singular convolution method to solve fifth order Korteweg-de Vries equations. Discrete singular convolution (DSC) methods belong to the family of local spectral (LS) methods. They were proposed by Wei [8] as a potential approach for numerical realization of the Hilbert transform, Abel transform, Random transform and Delta transform. The DSC algorithm has been essential to many practical applications, such as nonlinear equations [9], structural analysis [10,11], compressible and incompressible fluid flows [12,13], electromagnetic wave propagation, scattering [14, 15] and image analysis [16].
Recently, Pindza and Maré [17] utilized a combined fourth order exponential time differencing of Adams type and the DSC method to solve the generalized Kortewegde Vries. Their approach revealed exponential convergence. The advantage of the DSC methods is that they exhibit exponential convergence of spectral methods [18] while having the flexibility of local methods for complex boundary conditions [10,19].
The discretization of the generalized Korteweg-de Vries equations in space with the DSC method yields a system of ordinary differential equations (ODE) that needs to be solved by time integration methods. We use the fourth order exponential time differencing Runge Kutta (ETDRK4) [20] for the solution of the resulting semidiscrete equations. The matrix exponential required by the scheme is efficiently computed using best rational approximations based on the Carathéodory-Fejér (CF) procedure [21].
The layout of this paper is as follows. We describe the formulation of the DSC method in Section 2. In Section 3, we discuss the exponential time integration methods for solving the semi-discrete system resulting from the spatial discretization of the nonlinear PDEs. Numerical results illustrating the merits of the new scheme are given in Section 4 and we present our conclusions in Section 5.
2. Discrete Singular Convolution Methods
Discrete singular convolution (DSC) methods are relatively new numerical techniques in the field of nonlinear equations. They are defined as follow. Consider a distribution,  and
and  an element of the space of test functions. A singular convolution can be defined by
an element of the space of test functions. A singular convolution can be defined by
 (2)
(2)
where  is a singular kernel. For many science and engineering problems, an appropriate choice of
is a singular kernel. For many science and engineering problems, an appropriate choice of  has to be done. For instance, in the field of interpolation of surfaces and curves the singular kernel of delta type
has to be done. For instance, in the field of interpolation of surfaces and curves the singular kernel of delta type  is very important. For numerical solutions of partial differential equations, the kernel
is very important. For numerical solutions of partial differential equations, the kernel  is essential, where the subscript n denotes the
is essential, where the subscript n denotes the  -th order derivative of the distribution with respect to parameter
-th order derivative of the distribution with respect to parameter . While using the DSC method, numerical approximations of a function and its derivatives can be treated as convolutions with some kernels. According to the DSC method, the
. While using the DSC method, numerical approximations of a function and its derivatives can be treated as convolutions with some kernels. According to the DSC method, the  -th derivative of a function
-th derivative of a function  can be approximated as [22]
can be approximated as [22]
 (3)
(3)
where  is the grid spacing,
is the grid spacing,  is the set of discrete grid points which are centered around
is the set of discrete grid points which are centered around , and
, and  is the effective kernel, or computational bandwidth; and is usually smaller than the whole computational domain.
is the effective kernel, or computational bandwidth; and is usually smaller than the whole computational domain.
In the present paper, we focus our attention on the regularized Shannon kernel (RSK)
 (4)
(4)
to provide discrete approximations to the singular convolution kernels of the delta type (3). The required derivatives of the DSC kernels can be easily obtained using ([12])
 (5)
(5)
The error estimation of the regularized Shannon kernel (RSK) delivers very small truncation errors when it uses the above convolution algorithm ([23])
Theorem 2.1 (Qian [23]). Let  be a function and band limited to
be a function and band limited to ,
,
 Then
Then
 (6)
(6)
where  and
and 
Here  is the number of grid points. The
is the number of grid points. The  error given by (6) decays exponentially with respect to the increase of the DSC band width
error given by (6) decays exponentially with respect to the increase of the DSC band width 
The proof of the above theorem is beyond the scope of this paper. We refer the reader to [23] for a detailed discussion on the Shannon’s sampling theorem.
Using (4) and (5), the entries of the first, second, third and fifth differentiation matrices ,
,  ,
,  and
and  are given explicitly by
are given explicitly by
 (7)
(7)
 (8)
(8)
 (9)
(9)
 (10)
(10)
Note that the differentiation matrix in (5) is in general banded. This gives rise to great advantage in large scale computations. Extension to higher dimensions can be realized by tensor products.
The choice of ,
,  and
and  was suggested by Qian and Wei [23]. For instance, if the
was suggested by Qian and Wei [23]. For instance, if the  norm error is set to
norm error is set to  the following relations must be satisfied
the following relations must be satisfied
 (11)
(11)
where  and
and  is the frequency bound of the underlying function
is the frequency bound of the underlying function .
.
To illustrate the procedure of discretization of PDEs by the DSC method, we consider the computation of fifth order KdV equations given by
 (12)
(12)
where ,
,  ,
,  and
and  are real numbers and
are real numbers and .
.
This equation was previously considered in [24] where its properties were studied and its analytical soliton solutions were revealed. In the present paper we mainly focus on numerical solutions of Equation (12) via the use of DSC method.
The semi-discretized version, at the  th row, of the equation in consideration is obtained by substituting the relations (3) and (5) into (12), yielding
th row, of the equation in consideration is obtained by substituting the relations (3) and (5) into (12), yielding
 (13)
(13)
where ,
,  ,
,  and
and  are the typical elements of matrices
are the typical elements of matrices ,
,  ,
,  and
and , respectively. Therefore, Equation (13) can be expressed in the following matrix form
, respectively. Therefore, Equation (13) can be expressed in the following matrix form
 (14)
(14)
where  represents the linear part of the system and
represents the linear part of the system and 
represents the nonlinear part.
The main difficulty when dealing with systems of the type (14) is that the use of explicit time integrators is inefficient because the system typically suffers from instability due to the higher order derivative. This was emphasized by Pindza [25]. Consequently, the time step size must be significantly reduced in order to fulfill the drastic stability condition present in explicit time integrators. In this paper we use the fourth order exponential time differencing Runge-Kutta method.
3. Exponential Time Differencing
Exponential time differencing (ETD) schemes are known for a long time in computational electrodynamics; see [26] for a comprehensive review of ETD methods and their history. In this section, we describe the exponential time differencing fourth-order Runge-Kutta (ETD4RK) method which was proposed by Cox-Matthews [27].
The main idea of the ETD methods is to multiply both sides of a differential equation by some integrating factor, then we make a change of variable that allows us to solve the linear part exactly and, finally, we use a numerical method of our choice to solve the transformed nonlinear part.
3.1. Overview of the Method
In order to elaborate on this approach, let us consider the following semi-linear partial differential equation
 (15)
(15)
where  and
and  are the linear and nonlinear operators, respectively. The semi-linear partial differential equation is discretized in space with the discrete singular convolution method. Therefore, we obtain a system of ordinary differential equations (ODEs)
are the linear and nonlinear operators, respectively. The semi-linear partial differential equation is discretized in space with the discrete singular convolution method. Therefore, we obtain a system of ordinary differential equations (ODEs)
 (16)
(16)
The exponential time differencing (ETD) methods can be obtained by integrating Equation (16) exactly between the time steps  and
and  with respect to
with respect to , to obtain
, to obtain
 (17)
(17)
There exist various ETD methods for the evaluation of (17). The purpose of this work is not to give a complete classification of ETD methods. We focus specifically on the fourth order exponential time differencing RungeKutta (ETDRK4) given by
 (18)
(18)
The main computational challenge in the implementation of exponential time differencing (ETD) methods is the need for fast and stable evaluations of exponential and related  -functions
-functions
 (19)
(19)
i.e., functions of the form . The computation of these functions depends significantly on the structure and the range of eigenvalues of the linear operator and the dimensionality of the semi-discretized PDE. Unfortunately, for DSC methods the linear part have eigenvalues approaching zero, which leads to complications in the computation of the coefficients. Saad [28], and Hochbruck and Lubich [29] introduced Kyrlov methods to compute
. The computation of these functions depends significantly on the structure and the range of eigenvalues of the linear operator and the dimensionality of the semi-discretized PDE. Unfortunately, for DSC methods the linear part have eigenvalues approaching zero, which leads to complications in the computation of the coefficients. Saad [28], and Hochbruck and Lubich [29] introduced Kyrlov methods to compute  -functions. Kassam and Trefethen [20] used Cauchy integral representation on a circle for a stable computation of
-functions. Kassam and Trefethen [20] used Cauchy integral representation on a circle for a stable computation of  -functions. Our evaluation of exponential and related
-functions. Our evaluation of exponential and related  -matrix functions follows the idea of Schmelzer and Trefethen [30]. This method is based on computing optimal rational approximations to the matrix functions on the negative real axis using the Carathéodory-Fejér (CF) procedure [21], closely. The
-matrix functions follows the idea of Schmelzer and Trefethen [30]. This method is based on computing optimal rational approximations to the matrix functions on the negative real axis using the Carathéodory-Fejér (CF) procedure [21], closely. The  - functions (19) can be computed explicitly by a recursive formula
- functions (19) can be computed explicitly by a recursive formula
 (20)
(20)
Another way to compute the functions  is to use the Taylor series representation. Therefore, for all complex numbers
is to use the Taylor series representation. Therefore, for all complex numbers , we have
, we have
 (21)
(21)
However, it is known that the computation of these functions in their explicit or Taylor series form suffers from computational inaccuracy for matrices whose eigenvalues are equal to or approaching zero. This is generally the case when the spatial discretization is based on spectral methods. In order to overcome the numerical difficulties encountered in the computation of (20) and (21), a different tactic for evaluating the function was proposed in [20]. The key idea is to approximate the functions (for matrices or scalars) by means of contour integrals in the complex plane
 (22)
(22)
where . If the contour
. If the contour  encloses the spectrum of the non-diagonal matrix
encloses the spectrum of the non-diagonal matrix  we have
we have
 (23)
(23)
If the size of the matrix  is large, it is more advantageous to compute the product of the functions
is large, it is more advantageous to compute the product of the functions  and vectors
and vectors  rather than to compute
rather than to compute  explicitly. We have
explicitly. We have
 (24)
(24)
where  and
and  are the poles and the residues, respectively. The sum in (24) is evaluated by solving at most
are the poles and the residues, respectively. The sum in (24) is evaluated by solving at most  shifted linear systems. The poles and the residues are computed efficiently in standard precision by the Carathéodory-Fejér method [21,30].
shifted linear systems. The poles and the residues are computed efficiently in standard precision by the Carathéodory-Fejér method [21,30].
3.2. Stability Analysis
In this section, we investigate the linear stability of the ETDRK4 method for the nonlinear autonomous system of ODEs,
 (25)
(25)
linearized about a fixed point  such that
such that  We obtain
We obtain
 (26)
(26)
where u is now the perturbation of  and
and 
is a diagonal or a block diagonal matrix containing the eigenvalues of . If
. If , then the fixed point
, then the fixed point  is stable for all
is stable for all .
.
The stability region is four-dimensional, if both  and
and  are complex. The two-dimensional stability region is obtained if both
are complex. The two-dimensional stability region is obtained if both  and
and  are purely imaginary or purely real, or if
are purely imaginary or purely real, or if  is complex and
is complex and  is fixed and real.
is fixed and real.
In the paper, we follow the analysis employed in [27] and we only concentrate on the case where  and
and  are real. We define
are real. We define ,
,  and
and . Then, applying the ETDRK4 method (18) to the linearized problem (26) yields
. Then, applying the ETDRK4 method (18) to the linearized problem (26) yields
 (27)
(27)

However, one can observe that the computation of ,
,  ,
, and
and  suffers from computational inaccuracy for values of
suffers from computational inaccuracy for values of  equal to or approaching zero. Therefore, it is important to make use of their Taylor expansions
equal to or approaching zero. Therefore, it is important to make use of their Taylor expansions
We commence our analysis by choosing real negative values of  and looking for a region of stability in the complex
and looking for a region of stability in the complex  plane where
plane where . Hence, the boundary of the stability region is determined by writing
. Hence, the boundary of the stability region is determined by writing 
The corresponding families of stability regions are plotted in the complex  plane and displayed in Figure 1. Note that, in this figure, the horizontal and the vertical axes represent
plane and displayed in Figure 1. Note that, in this figure, the horizontal and the vertical axes represent  and
and , respectively. Clearly, as shown in Figure 1, the stability region for the ETDRK4 scheme grows larger as
, respectively. Clearly, as shown in Figure 1, the stability region for the ETDRK4 scheme grows larger as . The red curve corresponds to the case
. The red curve corresponds to the case , where the stability region of the ETDRK4 scheme coincides with that of the corresponding order fourth order Runge-Kutta (RK4) scheme.
, where the stability region of the ETDRK4 scheme coincides with that of the corresponding order fourth order Runge-Kutta (RK4) scheme.
4. Numerical Results
method for solving the fifth order KdV equation. To show the efficiency of the present method, we report the relative infinity and root mean square norm errors of the solution defined by
 (28)
(28)
and

Figure 1. Stability regions in the complex x plane. The curves correspond to , from the outer curve to the inner curve respectively. The inner red curve corresponds to y = 0.
, from the outer curve to the inner curve respectively. The inner red curve corresponds to y = 0.
 (29)
(29)
respectively, where  is the number of interior points,
is the number of interior points,  and
and  are the exact and computed values of the solution
are the exact and computed values of the solution  at point
at point .
.
In this paper, we consider two case studies depending on the set of parameters of (25) that provide multi-soliton solutions. We evaluate the performance the DSC algorithms for different time increment , spatial discretization
, spatial discretization , the support size of DSC kernels
, the support size of DSC kernels  and regularization parameter
and regularization parameter .
.
In our computation, the first set of parameters that we select are given by . In this case, the fifth order KdV Equation (11) is known as the SawadaKotera (SK) [2] equation and is given by
. In this case, the fifth order KdV Equation (11) is known as the SawadaKotera (SK) [2] equation and is given by
 (30)
(30)
The SK (30) admits multi-soliton solutions [31]. The derivation of these soliton solutions is beyond the scope of this paper. We only list them here for testing numerical procedures purposes. Single and two soliton solutions are given by
 (31)
(31)
where
 (32)
(32)
 (33)
(33)
respectively, with
 (34)
(34)
In our computational work, we use the collocation points
 (35)
(35)
The SK equation possesses infinite conservation laws [31]. The first three conservation laws are given as follow
 (36)
(36)
related to the mass, momentum and energy. The quantities ,
,  and
and  are applied to measure the conservation properties of the collocation scheme, calculated by
are applied to measure the conservation properties of the collocation scheme, calculated by
 (37)
(37)
The second set of parameters are chosen as  . This is well-known as the KaupKupershmidt (KK) [3] equation
. This is well-known as the KaupKupershmidt (KK) [3] equation
 (38)
(38)
Multi-soliton solutions can be generated by the following nonlinear transformation of the dependent variable,
 (39)
(39)
For one soliton solution, the dependent variable function is given by
 (40)
(40)
For two soliton solutions, the dependent variable function is
 (41)
(41)
with
 (42)
(42)
The KK equation possesses infinite conservation laws [31], the first three are given as follows
 (43)
(43)
The quantities ,
,  and
and  are applied to measure the conservation properties of the collocation scheme, calculated by
are applied to measure the conservation properties of the collocation scheme, calculated by
 (44)
(44)
In next sections, we study the propagation and the interaction of single and two soliton solutions, respectively.
4.1. Propagation of Single Solitons
In our numerical experiments, we first model the motion of a single soliton of the SK (30) and KK (38) equations. For the SK equation, the initial condition is taken from the exact solutions (32) and (31) at initial profile. Whereas for the KK equation, the initial condition is taken from the exact solutions (40) and (39) at initial profile. The boundary conditions in both cases are chosen so that
 (45)
(45)
In the first computation, we would like to investigate the convergence of the DSC method with respect to the number of grid points  and the DSC bandwidth
and the DSC bandwidth . The values of the parameters used in our numerical experiments are:
. The values of the parameters used in our numerical experiments are:  and
and  in both cases of the SK and KK equations. In each case, the soliton moves to the right across the space interval
in both cases of the SK and KK equations. In each case, the soliton moves to the right across the space interval  when the time interval is
when the time interval is . The choice of the DSC bandwidth
. The choice of the DSC bandwidth  and the regularizer parameter
and the regularizer parameter  is done according to the conditions (10). Hence if
is done according to the conditions (10). Hence if  then
then . If
. If  then
then . If
. If  then
then .
.
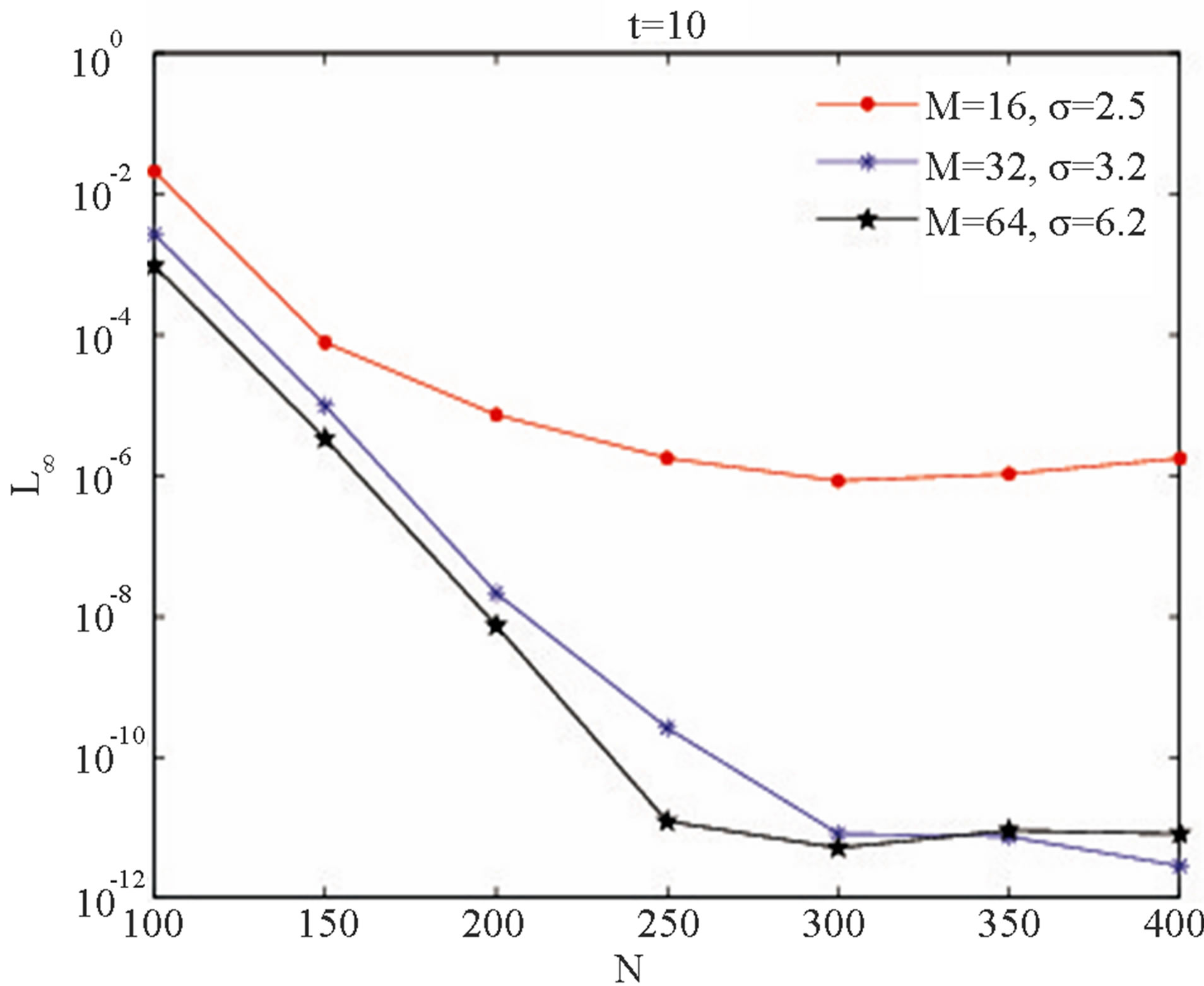
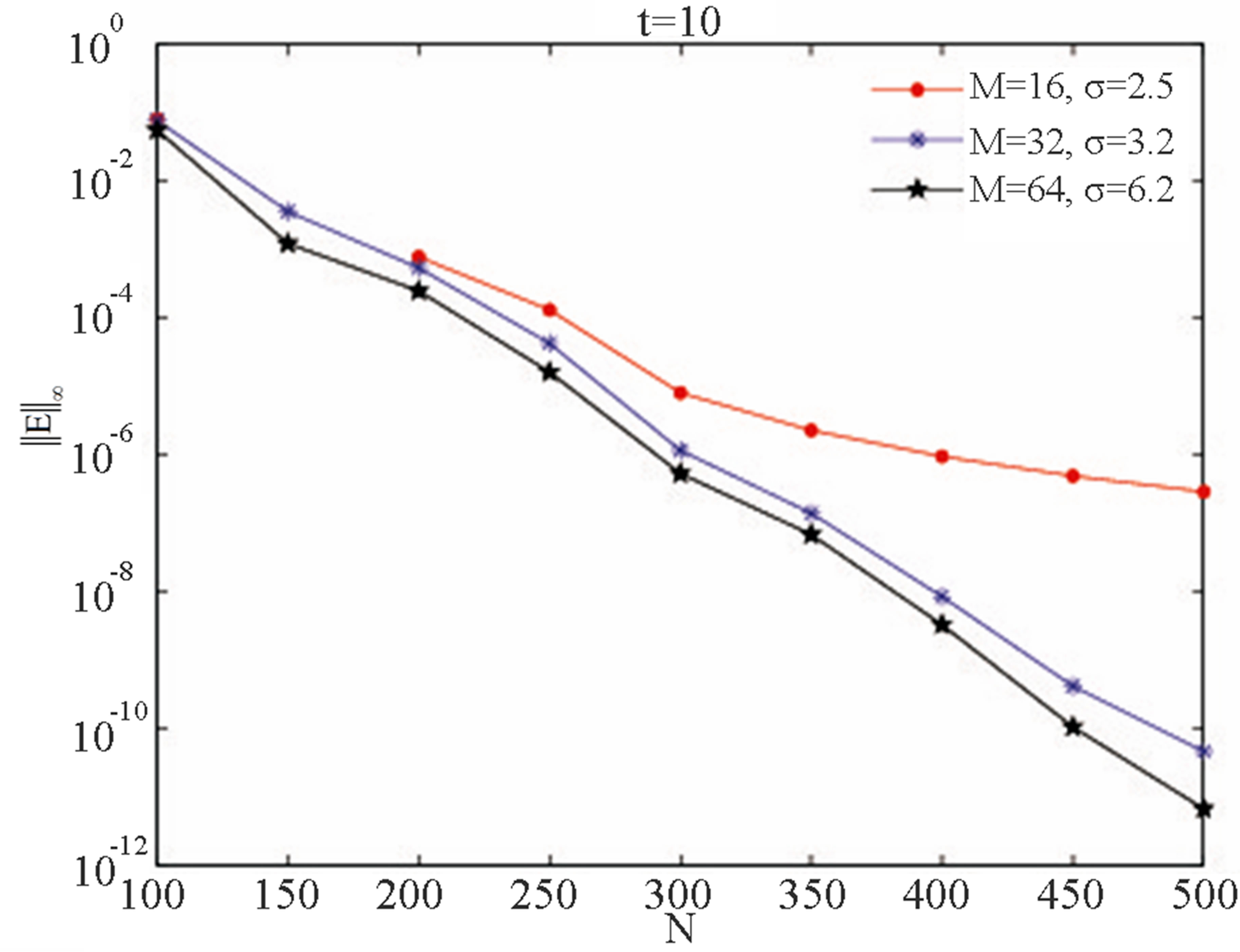
Figure 2 illustrates the convergence of the DSC with respect to the number of the grid points  and the DSC bandwidth
and the DSC bandwidth . We observe that numerical soliton solutions of the DSC method converge towards the exact soliton solutions as the number of grid points
. We observe that numerical soliton solutions of the DSC method converge towards the exact soliton solutions as the number of grid points  increases. We remark that the convergence of the DSC method also relies on the bandwidth
increases. We remark that the convergence of the DSC method also relies on the bandwidth . The results in Figure 2 shows that the case
. The results in Figure 2 shows that the case  gives a better convergence, the case
gives a better convergence, the case  gives the worst convergence, whereas when
gives the worst convergence, whereas when  we have an intermediate convergence.
we have an intermediate convergence.
 (a)
(a)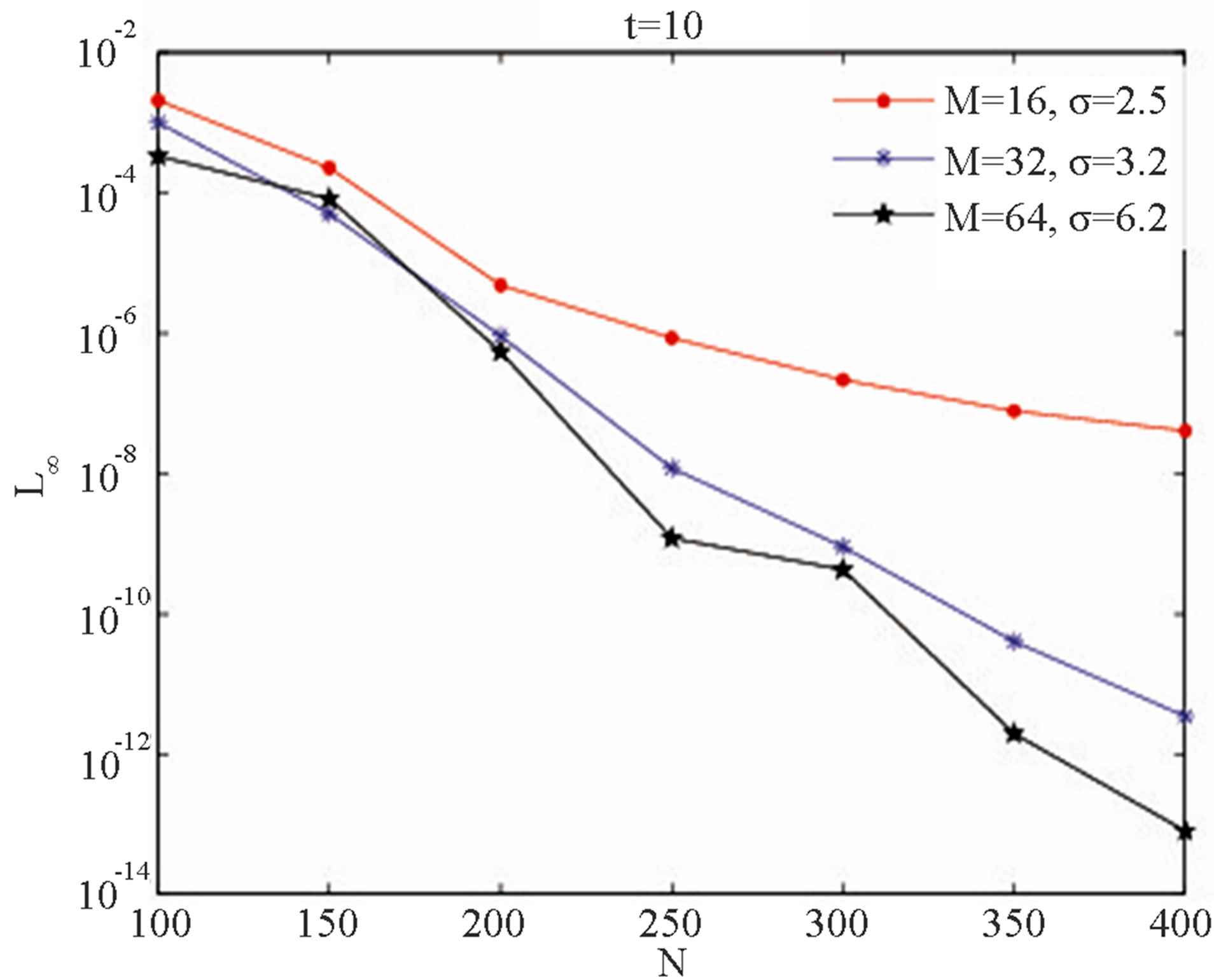 (b)
(b)
Figure 2. Convergence the DSC method for the propagation of single soliton solution of the SK (a) and the KK (b) equations at  with
with ,
,  and
and  and
and .
.
In fact when the bandwidth  is large, the DSC method behaves like a global and detains exponential accuracy, whereas for a small value of
is large, the DSC method behaves like a global and detains exponential accuracy, whereas for a small value of  , the DSC behaves like a local method such as finite difference methods. This result is stated by Theorem 2.1.
, the DSC behaves like a local method such as finite difference methods. This result is stated by Theorem 2.1.
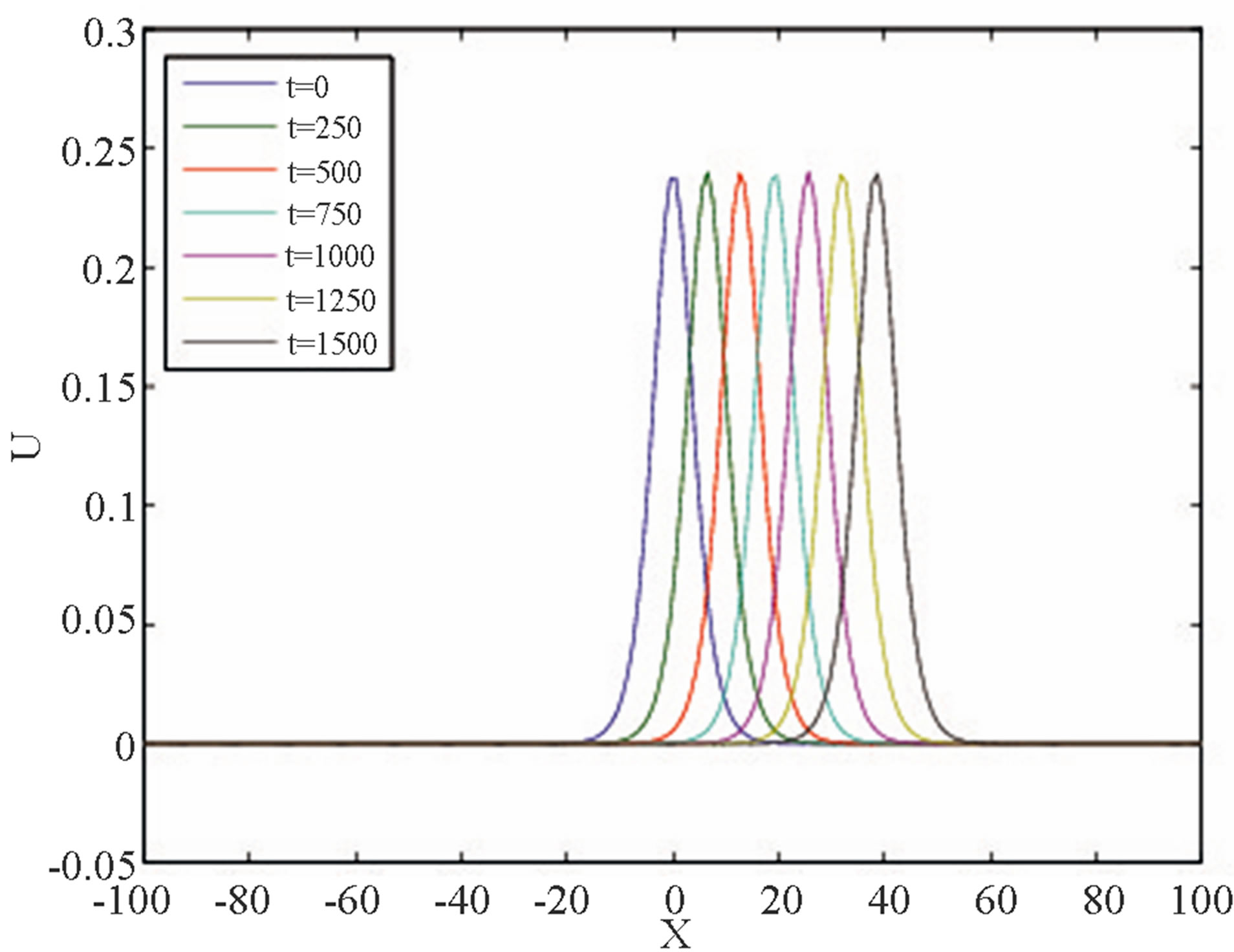
Figure 3 represents numerical propagation of one soliton solutions of the SK (a) and the KK (b) equations. These propagations occur for a long period of time with no spurious oscillations.
In the next experiment, we compute the error norms ,
,  and conservation quantities
and conservation quantities ,
,  and
and . The results are shown in Table 1 for one soliton solution of the SK equation and in Table 2 for one soliton solution of the KK equation.
. The results are shown in Table 1 for one soliton solution of the SK equation and in Table 2 for one soliton solution of the KK equation.
From the numerical results given in Tables 1 and 2 it
 (a)
(a)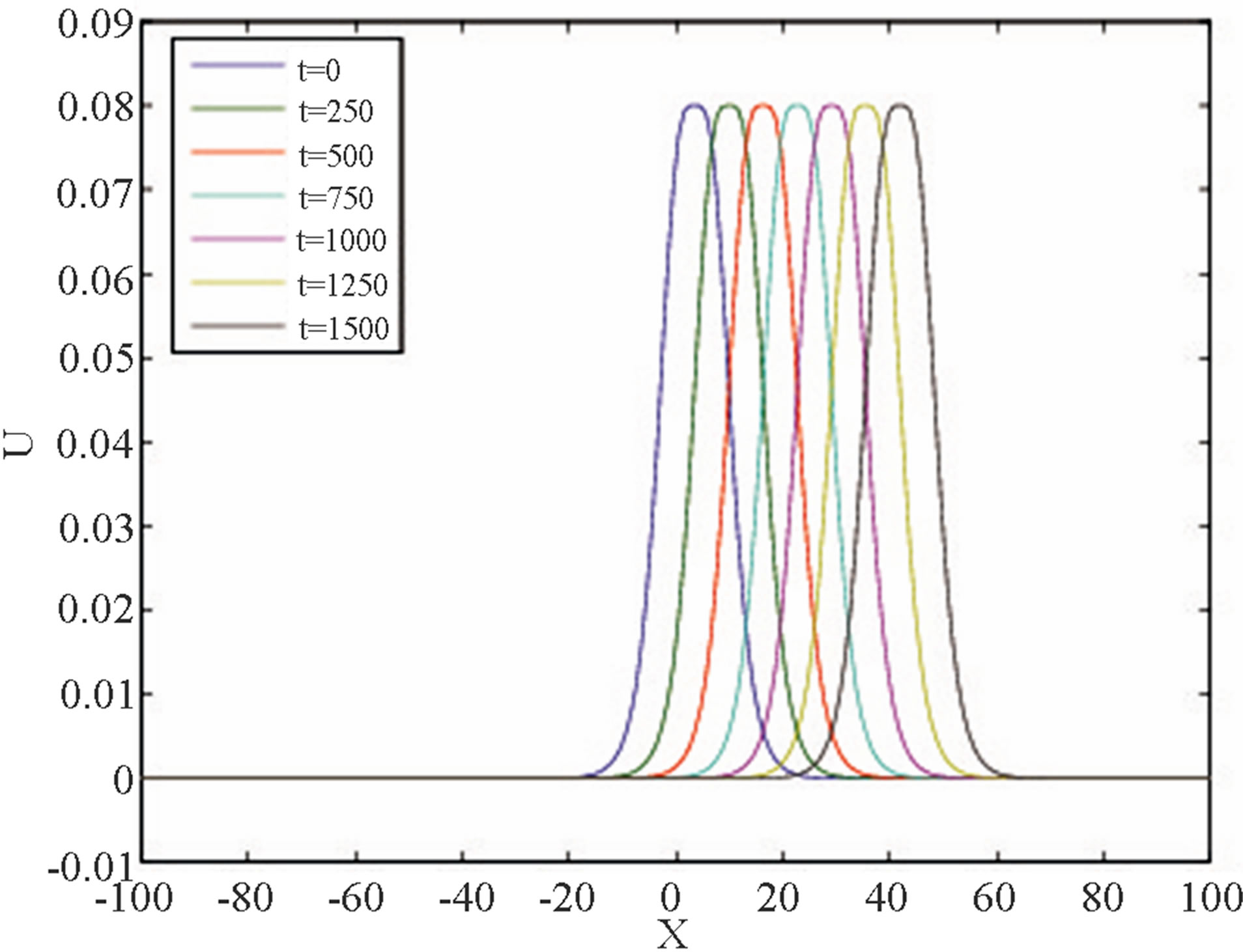 (b)
(b)
Figure 3. Propagation of single soliton solution of the SK (a) and the KK (b) equations with ,
,  ,
,  ,
, and
and .
.
is observed that throughout the simulation, the error norms  and
and  are of magnitude
are of magnitude  at a long period of time
at a long period of time . Whereas the invariants
. Whereas the invariants ,
,  and
and  at a given time
at a given time  are equal to those of the initial value. Our scheme conserve, the mass, momentum and energy.
are equal to those of the initial value. Our scheme conserve, the mass, momentum and energy.
4.2. Interaction of Two Solitons
This computational work is related to the interaction of two soliton solutions of SK (30) and KK (38) equations having different amplitudes and travelling in the same direction. For the SK equation, the initial condition is taken from the exact solutions (33) and (31) at initial profile; whereas for the KK equation, the initial condition is taken from the exact solutions (41) and (39) at initial profile. The boundary conditions in both cases are chosen so that
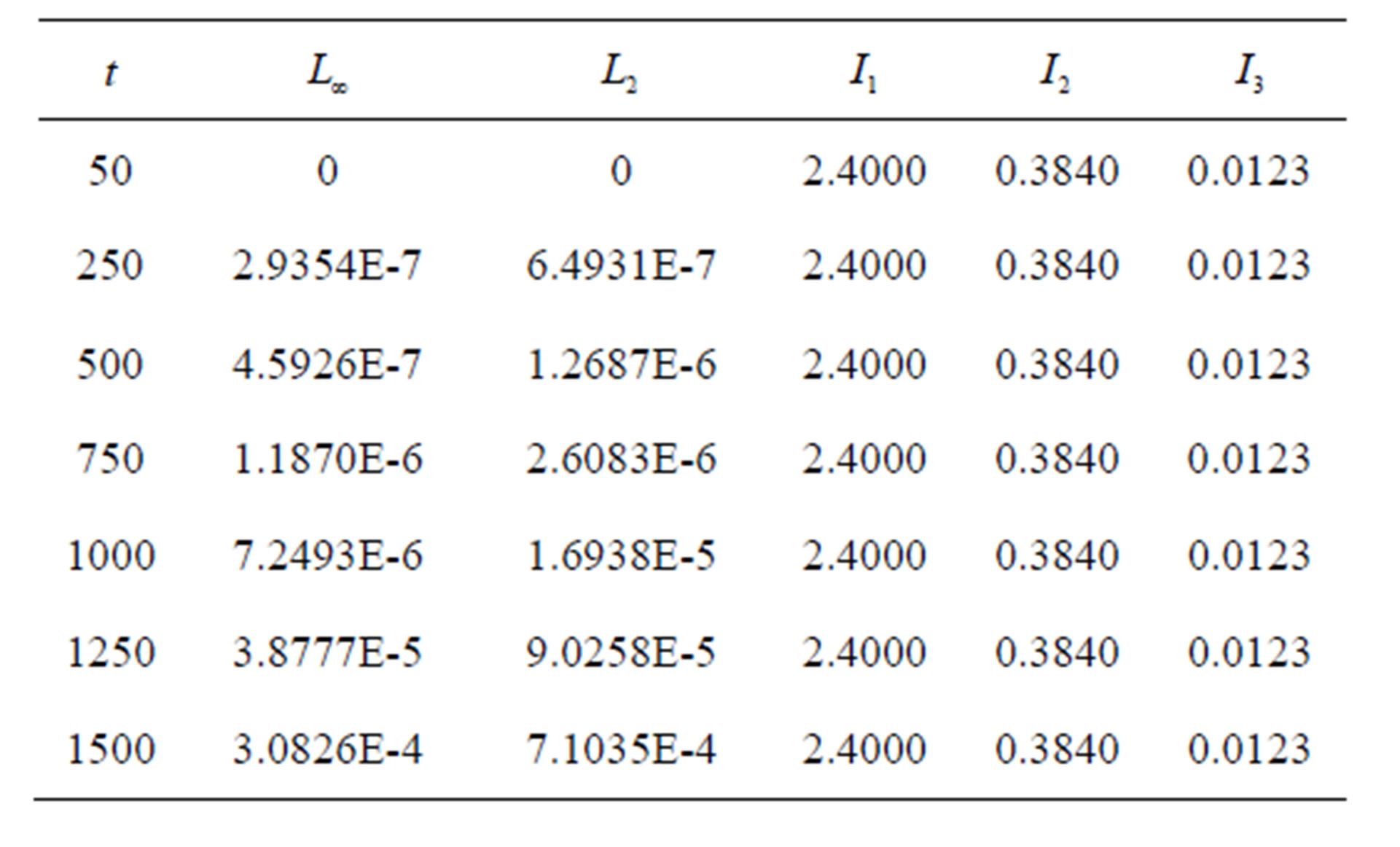
Table 1. Invariants and errors for a single soliton of the SK equation. ,
,  ,
,  ,
,  and
and .
.
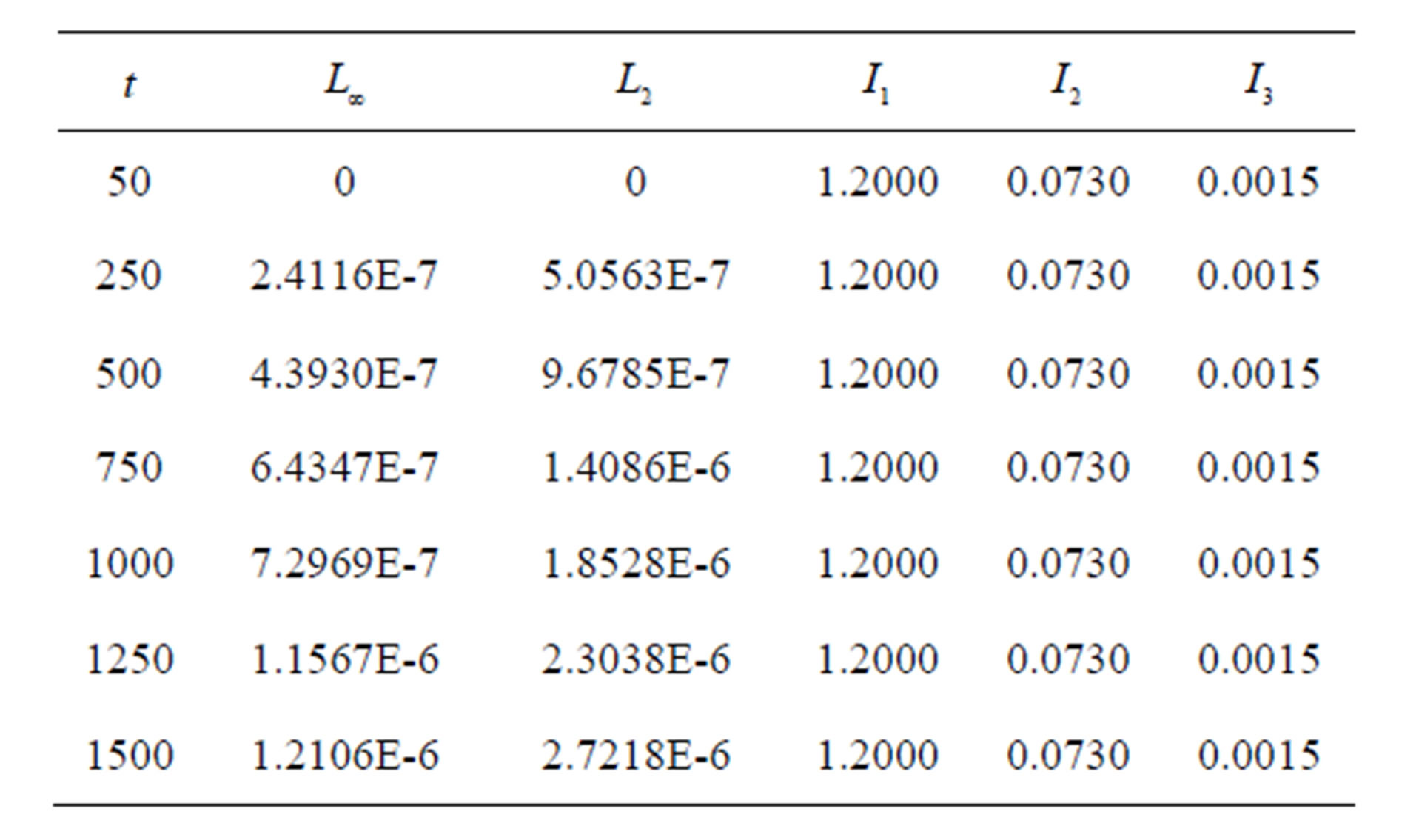
Table 2. Invariants and errors for a single soliton of the KK equation. ,
,  ,
,  ,
, and
and  .
.
 (46)
(46)
To allow the interaction to occur, the experiment was run from  to
to  in the region
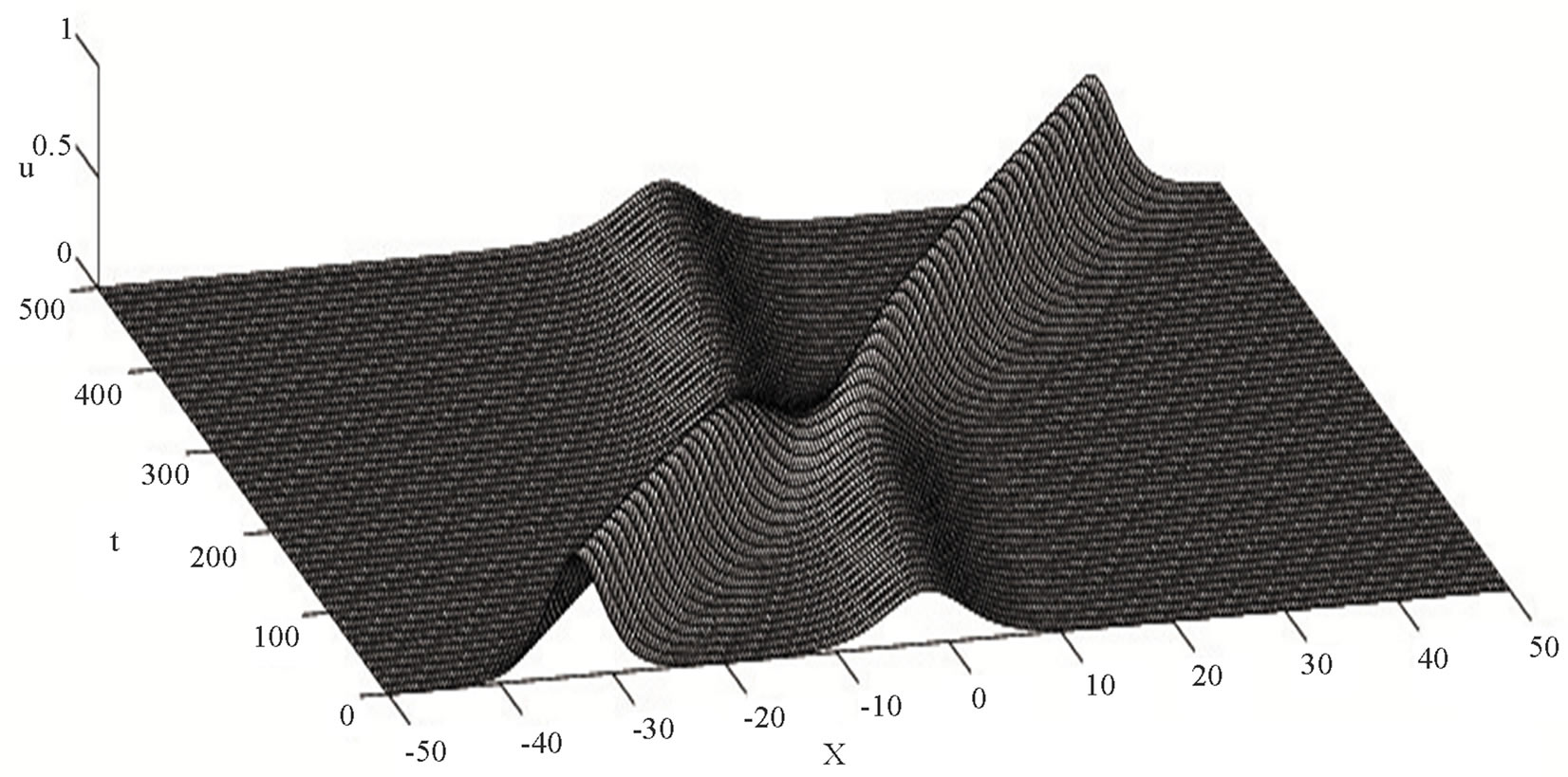
in the region . Figure 4 shows the interaction of two soliton solutions of the SK (top) and KK (bottom) equations for
. Figure 4 shows the interaction of two soliton solutions of the SK (top) and KK (bottom) equations for ,
,  ,
,  ,
,  ,
,  ,
, and
and . It can be seen that the faster pulse interacts with and emerges ahead of the lower pulse with the shape and velocity of each soliton retained.
. It can be seen that the faster pulse interacts with and emerges ahead of the lower pulse with the shape and velocity of each soliton retained.
We also investigate the convergence of the DSC method with respect to the number of the grid points  and the DSC bandwidth
and the DSC bandwidth  as we did in the case of one soliton solutions.
as we did in the case of one soliton solutions.
All the results are shown in Figure 5. We observe that numerical soliton solutions obtained by means of the DSC method converge to the exact soliton solutions as the number of grid points  increases. We also observe that the convergence of the DSC method relies on the bandwidth
increases. We also observe that the convergence of the DSC method relies on the bandwidth . The results on Figure 5 show that the case
. The results on Figure 5 show that the case  gives a better convergence, the case
gives a better convergence, the case  gives the worst convergence, whereas when
gives the worst convergence, whereas when
 (a)
(a)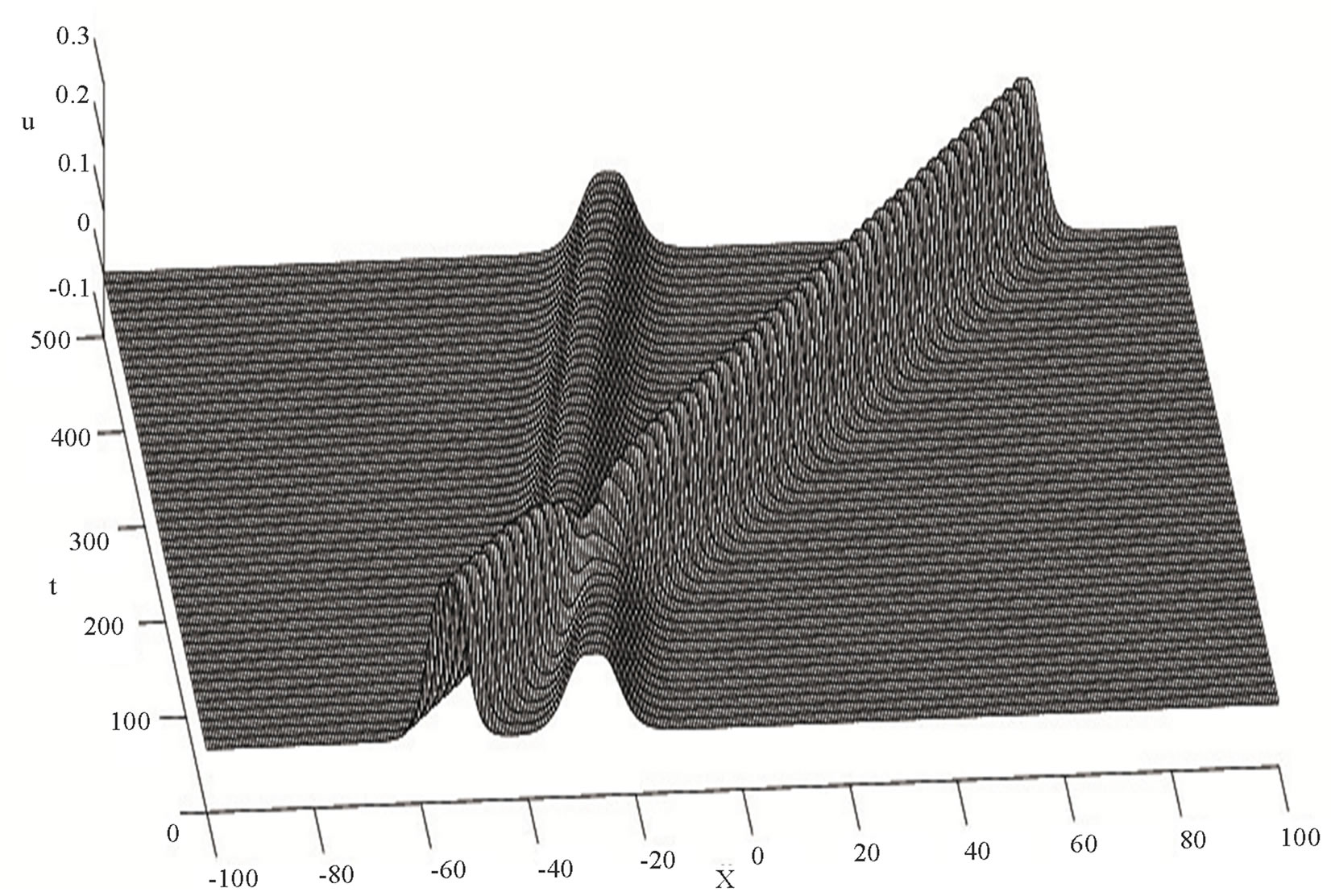 (b)
(b)
Figure 4. Interaction of two soliton solutions of the SK (top) and the KK (bottom) equations with ,
,  ,
,  ,
,  ,
,  ,
,  and
and .
.
 we have an intermediate convergence. In fact when the bandwidth
we have an intermediate convergence. In fact when the bandwidth  is large, the DSC method behaves like a global and detains exponential accuracy, whereas for a small value of
is large, the DSC method behaves like a global and detains exponential accuracy, whereas for a small value of , the DSC behaves like a local method such as finite difference methods.
, the DSC behaves like a local method such as finite difference methods.
In addition, we compute the error norms ,
,  and conservation quantities
and conservation quantities ,
,  and
and  are computed. The result are shown in Table 3 for two soliton solutions of the SK equation and in Table 4 for two soliton solutions of the KK equation.
are computed. The result are shown in Table 3 for two soliton solutions of the SK equation and in Table 4 for two soliton solutions of the KK equation.
From the numerical results given in Table 3 it is observed that throughout the simulation, the error norms  and
and  are of magnitude
are of magnitude  at a long period of time
at a long period of time , whereas the error norms
, whereas the error norms  and
and  (Table 4) are of magnitude
(Table 4) are of magnitude  at a long period of time. The invariants
at a long period of time. The invariants ,
,  and
and  at a given time
at a given time  are equal to those of the initial value. Numerical checks on the conservation mass, momentum and energy show that the
are equal to those of the initial value. Numerical checks on the conservation mass, momentum and energy show that the
 (a)
(a)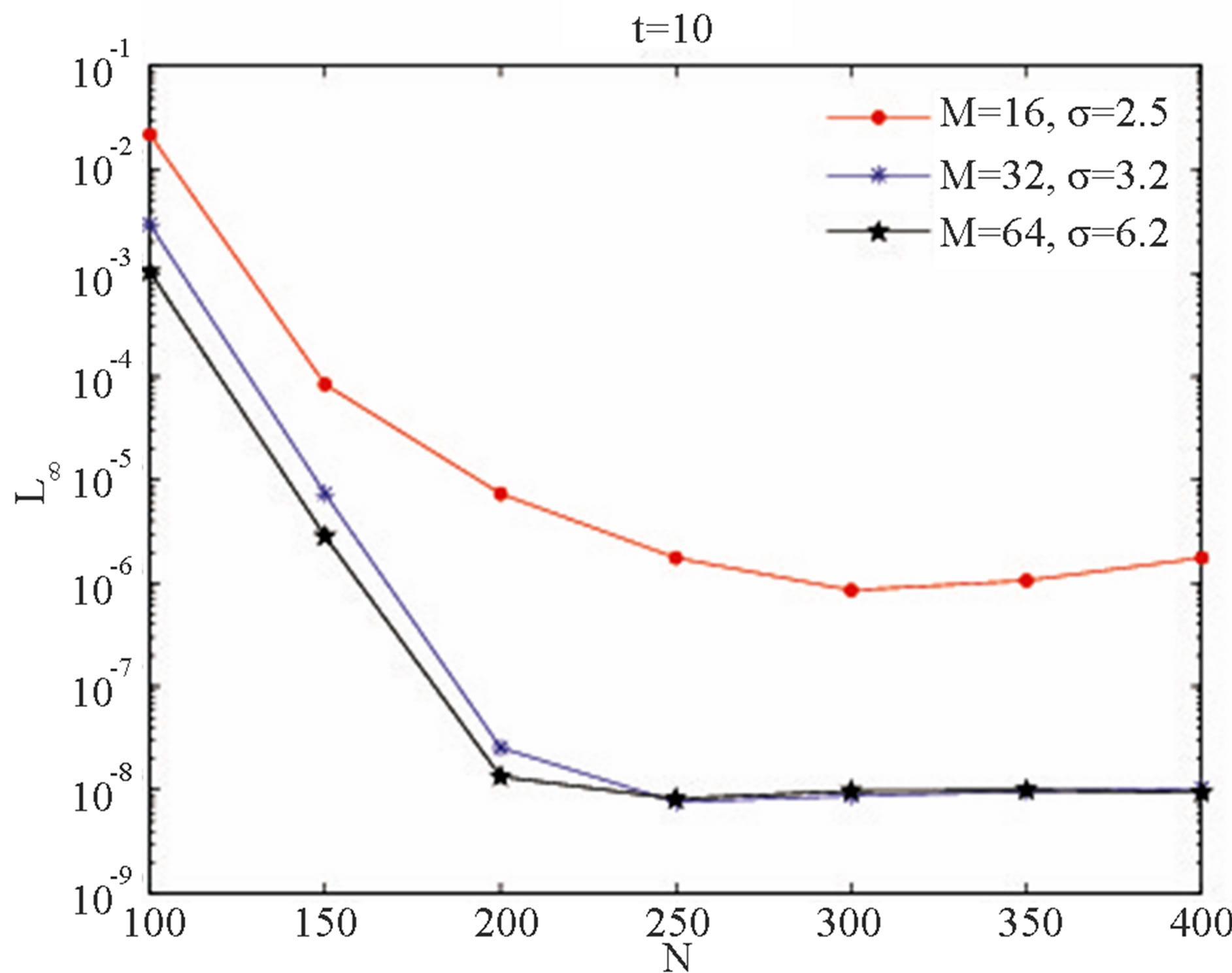 (b)
(b)
Figure 5. Convergence the DSC method for the interaction of two soliton solutions of the SK (a) and the KK (b) equations with ,
,  ,
,  ,
,  ,
, and
and .
.
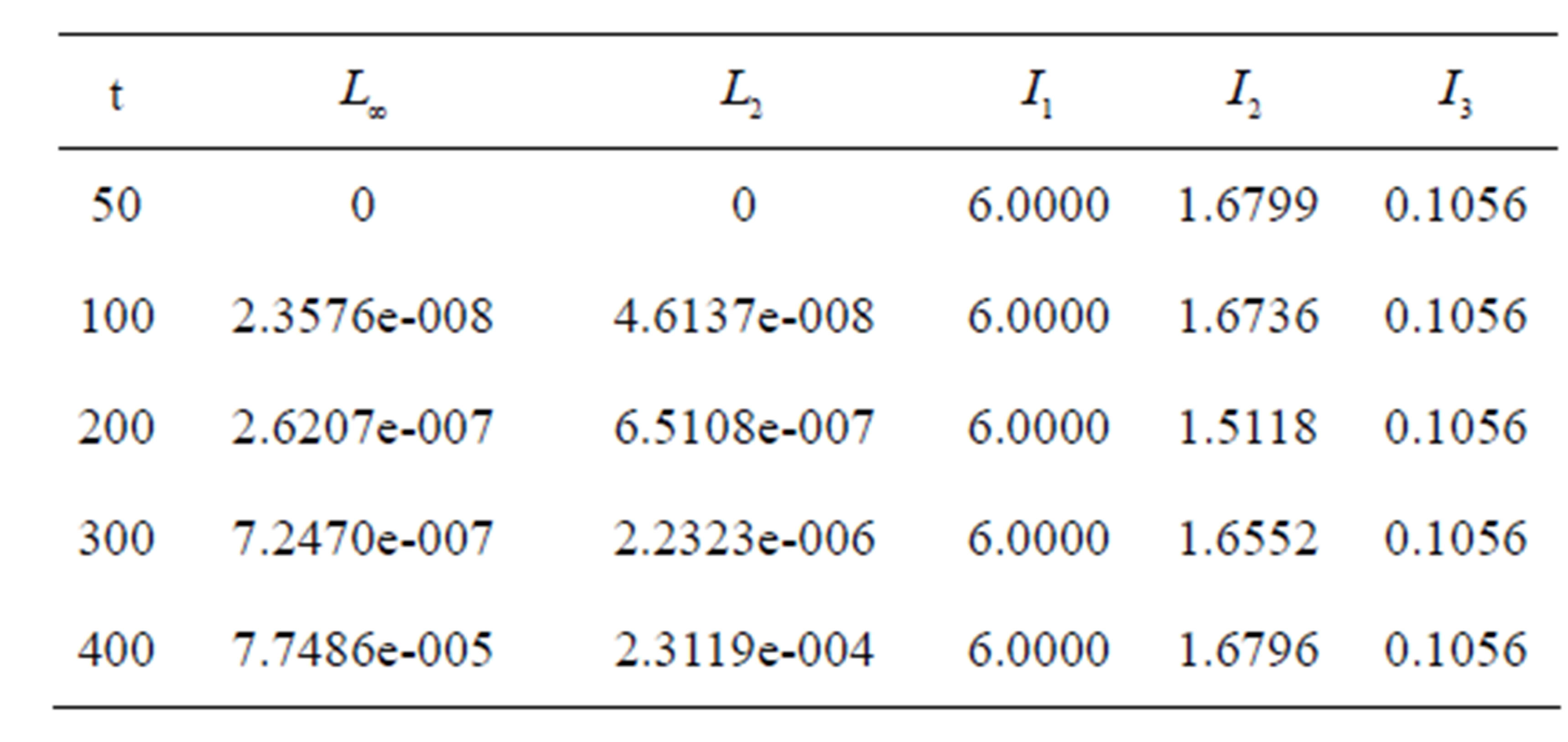
Table 3. Invariants and errors for interaction of two solitons of the SK equation. ,
,  ,
,  ,
,  ,
,  ,
,  ,
, .
.
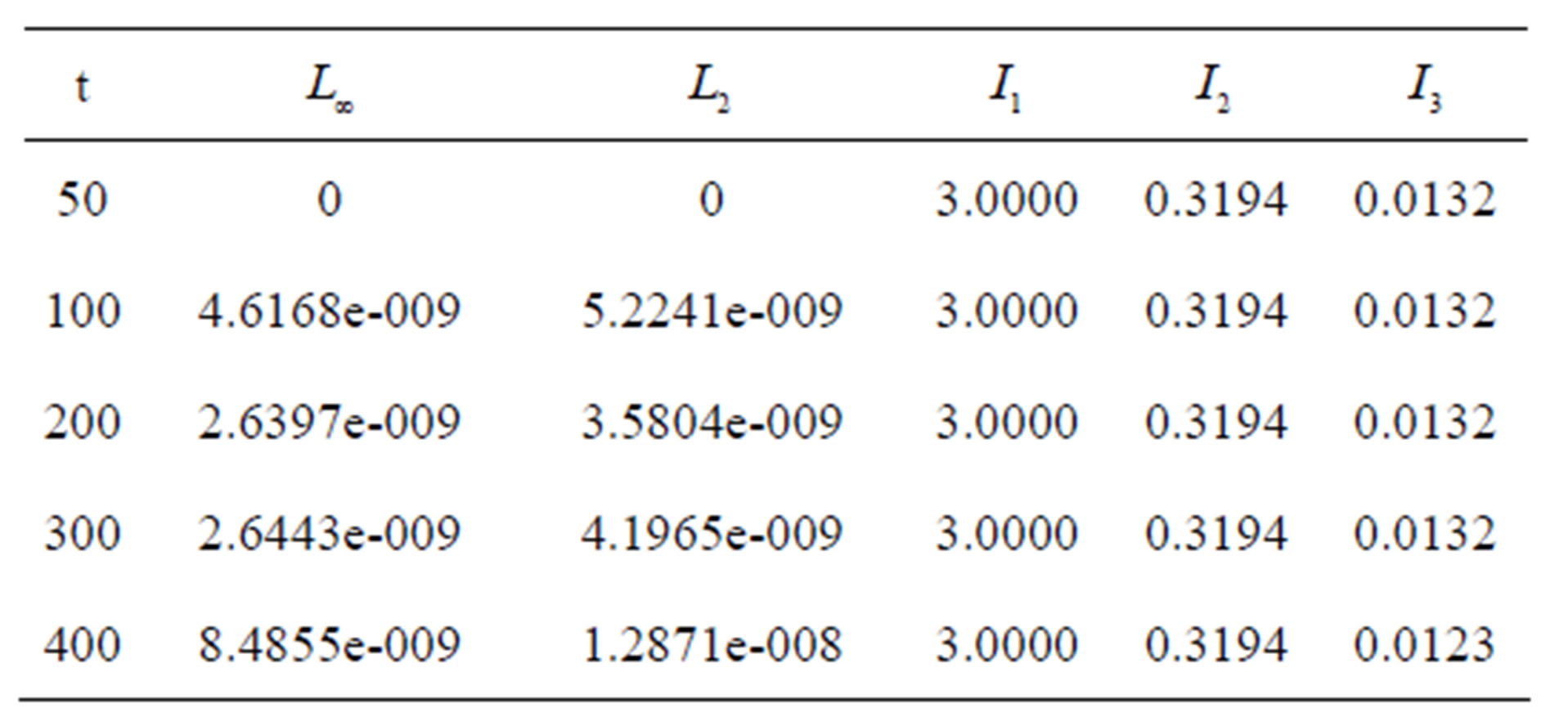
Table 4. Invariants and errors for interaction of two solitons of the KK equation.
three quantities remain constant with respect to time.
5. Conclusion
We studied the application of the combined DSC scheme in space discretization and the ETDRK4 for time discretization to solve the SK and KK equations. We considered the case of the propagation of a single soliton and the interaction of two solitons. Numerical results showed that the DSC method converges exponentially with respect to the number of grid points  and the bandwidth
and the bandwidth . Numerical checks on the conservation mass, momentum and energy revealed that the three quantities remain constant with respect to time
. Numerical checks on the conservation mass, momentum and energy revealed that the three quantities remain constant with respect to time . The DSC scheme is a robust and reliable numerical method of the fifth order KdV equation. We are currently investigating the utility of the DSC method to solve the GRLW equation.
. The DSC scheme is a robust and reliable numerical method of the fifth order KdV equation. We are currently investigating the utility of the DSC method to solve the GRLW equation.
6. Acknowledgements
E. Pindza acknowledges the financial support from Brad Welch through RidgeCape.
REFERENCES
- P. D. Lax, “Integrals of Nonlinear Equations of Evolution and Solitary Waves,” Communications on Pure and Applied Mathematics, Vol. 21, No. 5, 1968, pp. 467-490. http://dx.doi.org/10.1002/cpa.3160210503
- K. Sawada and T. Kotera, “A Method for Finding
 - Soliton Solutions for the KdV Equation and KdV-Like Equations,” Progress of Theoretical Physics, Vol. 51, No. 5, 1974, pp. 1355-1367. http://dx.doi.org/10.1143/PTP.51.1355
- Soliton Solutions for the KdV Equation and KdV-Like Equations,” Progress of Theoretical Physics, Vol. 51, No. 5, 1974, pp. 1355-1367. http://dx.doi.org/10.1143/PTP.51.1355 - A. P. Fordy and J. Gibons, “Some Remarkable Nonlinear Transformations,” Physics Letters, Vol. A75, No. 5, 1980, p. 325. http://dx.doi.org/10.1016/0375-9601(80)90829-4
- M. Ito, “An Extension of Nonlinear Evolution Equations of the KdV (mKdV) Type to Higher Orders,” Journal of the Physical Society of Japan, Vol. 49, 1980, pp. 771-778. http://dx.doi.org/10.1143/JPSJ.49.771
- J. Shen, “A New Dual-Petrov-Galerkin Method for Third and Higher Odd-Order Differential Equations: Application to the KdV Equation,” SIAM Journal on Numerical Analysis, Vol. 41, No. 5, 2003, pp. 1595-1619. http://dx.doi.org/10.1137/S0036142902410271
- J. Shen and L. L. Wang, “Laguerre and Composite Legendre-Laguerre Dual-Petrov-Galerkin Methods for ThirdOrder Equations,” DCDS-B, Vol. 6, No. 6, 2006, pp. 1381-1402. http://dx.doi.org/10.3934/dcdsb.2006.6.1381
- J. M. Yuan, J. Shen and J. Wu, “A dual-Petrov-Galerkin Method for the Kawahara-Type Equation,” Journal of Scientific Computing, Vol. 34, No. 1, 2008, pp. 48-63. http://dx.doi.org/10.1007/s10915-007-9158-4
- G. W. Wei, “Discrete Singular Convolution for the Fokker-Planck Equation,” Journal of Chemical Physics, Vol. 110, 1999, pp. 8930-8942. http://dx.doi.org/10.1063/1.478812
- W. Bao, F. Sun and G. W. Wei, “Numerical Methods for the Generalized Zakharov System,” Journal of Computational Physics, Vol. 190, No. 1, 2003, pp. 201-228. http://dx.doi.org/10.1016/S0021-9991(03)00271-7
- G. W. Wei, Y. B. Zhao and Y. Xiang, “Discrete Singular Convolution and Its Application to the Analysis of Plates with Internal Supports. Part 1: Theory and Algorithm,” International Journal Numerical Methods in Engineering, Vol. 55, No. 8, 2002, pp. 913-946. http://dx.doi.org/10.1002/nme.526
- G. W. Wei, “Vibration Analysis by Discrete Singular Convolution,” Journal of Sound Vibration, Vol. 244, No. 3, 2001, pp. 535-553. http://dx.doi.org/10.1006/jsvi.2000.3507
- G. W. Wei, “A New Algorithm for Solving Some Mechanical Problems,” Computational Methods in Applied Mechanical Engineering, Vol. 190, No. 15, 2001, pp. 2017- 2030. http://dx.doi.org/10.1016/S0045-7825(00)00219-X
- Y. C. Zhou and G. W. Wei, “High-Resolution Conjugate Filters for the Simulation of Flows,” Journal of Computational Physics, Vol. 189, No. 1, 2003, pp. 150-179.
- G. Bao, G. W. Wei and S. Zhao, “Numerical Solution of the Helmholtz Equation with High Wave Numbers,” International Journal of Numerical Methods in Engineering, Vol. 59, No. 3, 2004, pp. 389-408. http://dx.doi.org/10.1002/nme.883
- G. Bao, G. W. Wei and S. Zhao, “Local Spectral TimeDomain Method for Electromagnetic Wave Propagation,” Optic Letters, Vol. 28, No. 7, 2003, pp. 513-515. http://dx.doi.org/10.1364/OL.28.000513
- Z. J. Hou and G. W. Wei, “A New Approach for Edge Detection,” Pattern Recognition, Vol. 35, No. 7, 2002, pp. 1559-1570. http://dx.doi.org/10.1016/S0031-3203(01)00147-9
- E. Pindza and E. Maré, “Discrete Singular Convolution and Exponential Time Integrators for Solving the Generalized Korteweg-de Vries Equation,” Technical Report UPWT 2013/14, University of Pretoria, Pretoria.
- S. Y. Yang, Y. C. Zhou and G. W. Wei, “Comparison of the Discrete Singular Convolution Algorithm and the Fourier Pseudospectral Methods for Solving Partial Differential Equations,” Computer Physics Communications, Vol. 143, No. 2, 2002, pp. 113-135. http://dx.doi.org/10.1016/S0010-4655(01)00427-1
- G. W. Wei, Y. B. Zhao and Y. Xiang, “A Novel Approach for the Analysis of High Frequency Vibrations,” Journal of Sound and Vibration, Vol. 257, No. 2, 2002, pp. 207- 246. http://dx.doi.org/10.1006/jsvi.2002.5055
- A. K. Kassam and L. N. Trefethen, “Fourth-Order Time Stepping for Stiff PDEs,” SIAM Journal of Scientific Computing, Vol. 26, No. 4, 2005, pp. 1214-1233. http://dx.doi.org/10.1137/S1064827502410633
- L. N. Trefethen and H. M. Gutknecht, “The CarathéodoryFejér Method for Real Rational Approximation,” SIAM Journal on Numerical Analysis, Vol. 20, No. 2, 1983, pp. 420-436. http://dx.doi.org/10.1137/0720030
- G. W. Wei, “Discrete Singular Convolution for the SineGordon Equation,” Physica D, Vol. 137, No. 3, 2000, pp. 247-259. http://dx.doi.org/10.1016/S0167-2789(99)00186-4
- L. W. Qian, “On the Regularized Whittaker-Kotel’nikovShannon Sampling Formula,” Proceedings of American Mathematical Society, Vol. 131, No. 4, 2003, pp. 1169- 1176. http://dx.doi.org/10.1090/S0002-9939-02-06887-9
- R. X. Yao, C. Z. Qu and Z. B. Li, “On Properties of New Parameterized 5th-Order Nonlinear Evolution Equation,” Chaos, Solitons and Fractals, Vol. 21, No. 5, 2004, pp. 1145-1152. http://dx.doi.org/10.1016/j.chaos.2003.12.078
- E. Pindza, “Spectral Difference Methods for Solving Equation of the KdV Hierarchy,” MSc Thesis, University of Stellenbosch, Stellenbosch, 2008.
- B. Minchev and W. Wright, “A Review of Exponential Integrators for First Order Semi-Linear Problems,” Technical Report 2, The Norwegian University of Science and Technology, 2005.
- S. M. Cox and P. C. Matthews, “Exponential Time Differencing for Stiff Systems,” Journal of Computational Physics, Vol. 176, No. 2, 2002, pp. 430-455. http://dx.doi.org/10.1006/jcph.2002.6995
- Y. Saad, “Analysis of Some Krylov Subspace Approximations to the Matrix Exponential Operator,” SIAM Journal of Numerical Analysis, Vol. 29, No. 1, 1992, pp. 209-228. http://dx.doi.org/10.1137/0729014
- M. Hochbruck and C. Lubich, “On Krylov Subspace Approximations to the Matrix Exponential Operator,” SIAM Journal of Numerical Analysis, Vol. 34, No. 5, 1997, pp. 1911-1925. http://dx.doi.org/10.1137/S0036142995280572
- T. Schmelzer and L. N. Trefethen, “Evaluating Matrix Functions for Exponential Integrators via CarathéodoryFejér Approximation and Contour Integrals,” Electronic Transactions on Numerical Analysis, Vol. 29, 2007, pp. 1-18.
- A. Nuseir, “Symbolic Computation of Exact Solutions of Nonlinear Partial Differential Equations Using Direct Methods,” PhD Thesis, Colorado School of Mines, 1997.