International Journal of Geosciences, 2012, 3, 329-332
http://dx.doi.org/10.4236/ijg.2012.32035 Published Online May 2012 (http://www.SciRP.org/journal/ijg)
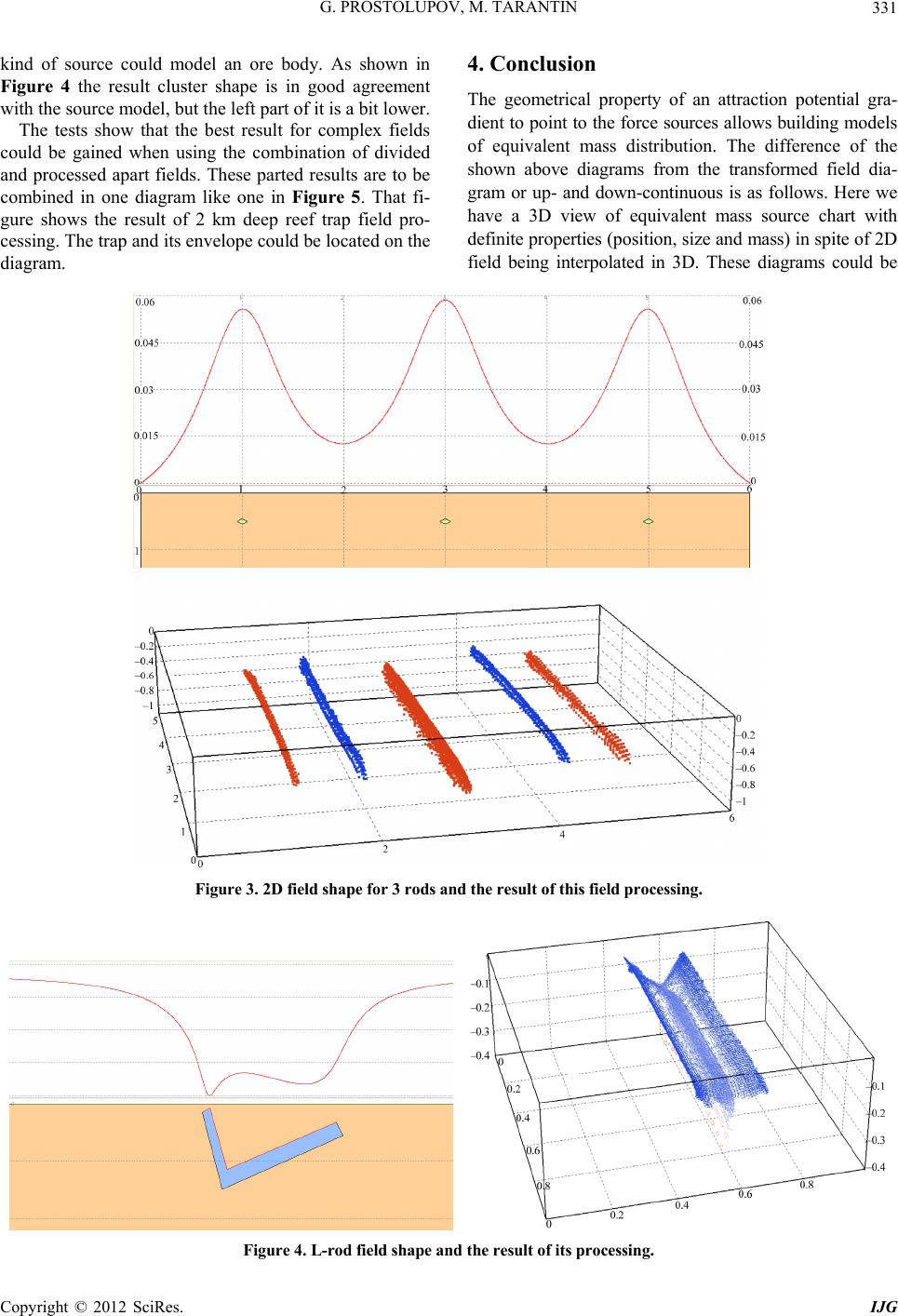
Polar 3D Transformation of the Full Gradient of
Attractive Potential
Gennady Prostolupov, Michail Tarantin
Laboratory of Geopotential Fields, Perm, Russia
Email: gravik2@rambler.ru
Received December 21, 2011; revised February 9, 2012; accepted March 11, 2012
ABSTRACT
The method of 3D polar transformation of full gravity potential gradient vectors is based on the geometric properties of
the crossing points of complete gradient of the potential to localize the source region that causes the observed anomaly.
The cross-points—poles—are defined for rectangular polygons of different sizes where the full gradient vector is de-
fined at every vertex. The polygon size range could be specified. The set of poles, positive and negative, is then repre-
sented on the 3D chart in the form of clusters of dots or cubes and can be considered as a model image of the sources,
intended for visual analysis and further interpretation.
Keywords: Gravity; Anomaly; Interpretation; Model; Vector; Full Gradient; 3D Chart
1. Introduction
Developing new methods of data express interpretation,
that give the first approximation for quantity analysis and
geological interpretation, is of actual type. Presented me-
thod of a polar transformation, as Euler deconvolution [1]
or tensor deconvolution [2], is just a transformation of
obtained data and is used primary for visual analysis.
Attention to such kind of methods is due to its low cost
in computing. The most close to such methods are that
based on a theory of special points. But the methods
mentioned above are much more productive but less
strong with theory.
2. Theory
The method described in this paper uses the geometrical
properties of the full vectors of potential gradient in
three-dimensional space: they concentrate in the positive
mass direction and disperse when mass is negative. The
crossing point of vector-lines lies in nearby of pertur-
bation mass and coincides with that mass if it is of point-
type. For brief these points of line crossing are called by
the authors as poles, because they became a special pro-
perty—sign of the attached mass (positive or negative).
All three gradients could be found from the vertical
one using the method of source-point approximation [3].
For survey data the construction of point masses below
every measure point is build. The gravity effect of such
construction should be equal to the measured data with
the given accuracy. When having such a system of masses
any type of derivatives could be found. For example, the
first order derivatives could be found by (1).
3
3
3
dd
dd
dd
xxy
yxy
zxy
VG rxy
x
VG rxy
y
VG rxy
z
(1)
When having the gravity effect of a sphere the cross-
point of any lines of full gradient vectors coincides with
the center of that sphere. But the real field is additive and
complex and it is practically impossible to find 3 vectors
of attractive force that cross in one point of a realm.
Nevertheless we had introduced a following algorithm to
get the coordinates of poles.
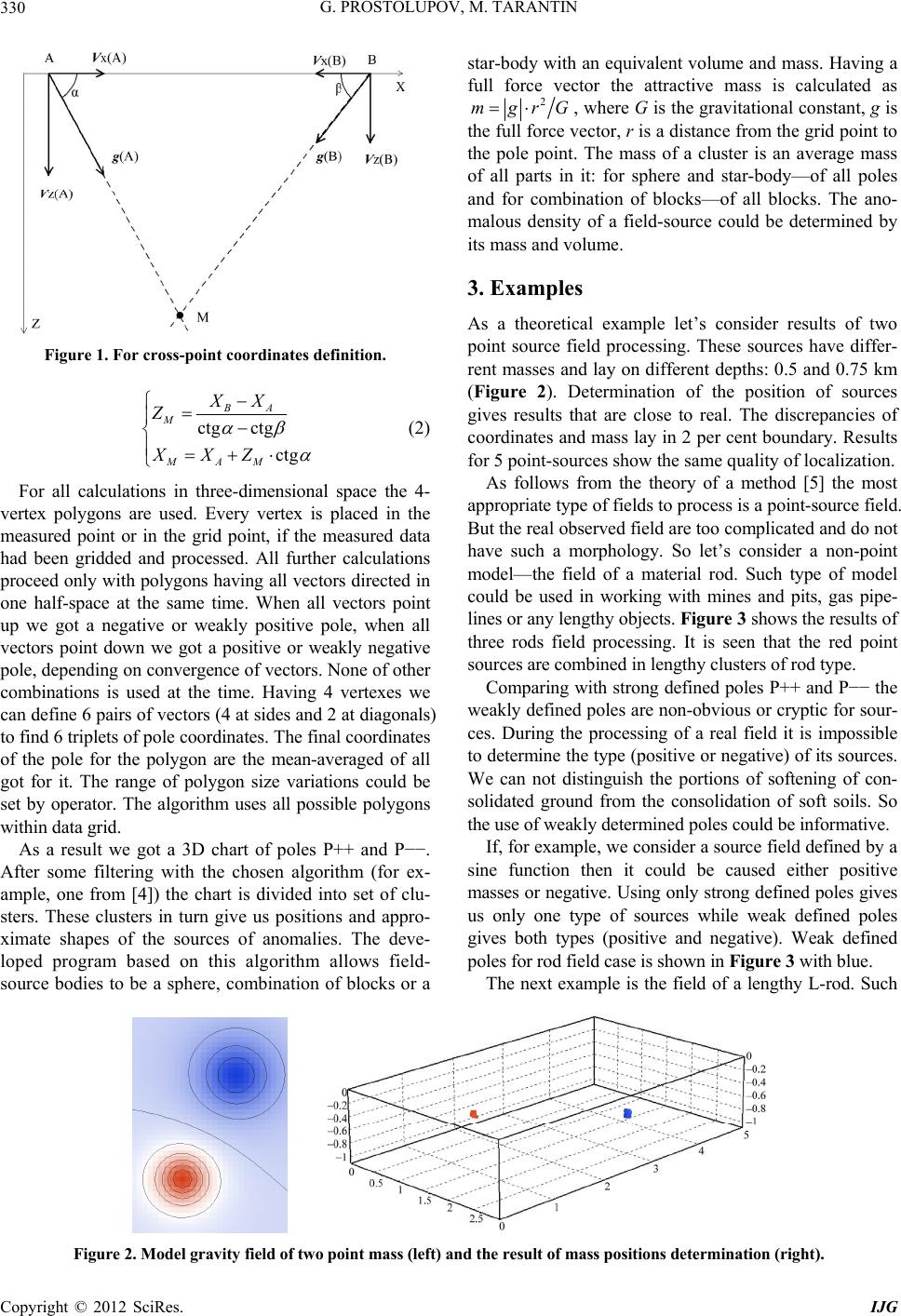
Let’s consider determination of a cross-point coordi-
nates of a single mass in a plane by one pair of vectors
(Figure 1). Let us know the attractive force vectors in
two points A and B. Obviously both of them would look
in the direction of the attractor and exactly in its center.
So we could determine the mass center position of the
body by two coordinates XM and ZM by (2).
Having 2 vectors we can define 5 types of poles po-
ssible. When both of the vectors concentrate in the lower
half-space we got a positive pole, when both of them
concentrate in the upper part of the half-space we got a
negative pole. When vectors disperse to lower half-space
or disperse to upper half-space we got weakly negative or
weakly positive type respectively. The last type is neu-
tral.
C
opyright © 2012 SciRes. IJG