Paper Menu >>
Journal Menu >>
 International Journal of Modern Nonlinear Theory and Application, 2012, 1, 6-13 http://dx.doi.org/10.4236/ijmnta.2012.11002 Published Online March 2012 (http://www.SciRP.org/journal/ijmnta) Chaotic and Hyperchaotic Complex Jerk Equations Gamal M. Mahmoud, Mansour E. Ahmed Department of Mathematics, Faculty of Science, Assiut University, Assiut, Egypt Email: gmahmoud@aun.edu.eg Received January 27, 2012; revised February 29, 2012; accepted March 12, 2012 ABSTRACT The aim of this paper is to introduce and investigate chaotic and hyperchaotic complex jerk equations. The jerk equa- tions describe various phenomena in engineering and physics, for example, electrical circuits, laser physics, mechanical oscillators, damped harmonic oscillators, and biological systems. Properties of these systems are studied and their Lya- punov exponents are calculated. The dynamics of these systems is rich in wide range of systems parameters. The con- trol of chaotic attractors of the complex jerk equation is investigated. The Lyapunov exponents are calculated to show that the chaotic behavior is converted to regular behavior. Keywords: Hyperchaotic; Chaotic; Attractors; Lyapunov Exponents; Jerk Function; Control; Complex 1. Introduction Chaos and hyperchaos can occur in systems of autono- mous ordinary differential equations (ODE’s) with at least three variables and two quadratic nonlinearities [1-4]. The Poincaré-Bendixson theorem shows that chaos does not exist in a two-dimensional autonomous system. In 1994, Sprott [5] found numerically fourteen chaotic systems with six terms and one quadratic nonlinearities. In 1996, Gottlieb [6] showed that some of these systems could be written as a single third-order ODE. By “jerk function” he means a function j such that the third-order ODE can be written in the form ,,j , where j is the time derivative of the acceleration and the equation is called a jerk equation. The jerk equations describe various phenomena in engineering and physics, for example, electrical circuits, laser physics, mechanical oscillators, damped harmonic oscillators, and biological systems. In the literature some jerk equations are introduced and stu- died [7-13]. Kocić et al. [14] considered and studied two modifications of a 3-dimensional dynamic flow known as jerk dynamical systems of Sprott [13]. In this paper, we define a complex jerk equation as an autonomous third-order complex differential equation of the form: ,,,,, ,zj zzzzzz (1) where z is a complex variable, the overdot represent the time derivative and j is the complex jerk function (time derivative of acceleration ) and an overbar denotes complex conjugate variables. In recent years we intro- duced and studied several complex nonlinear systems which appear in many important applications [15-21]. z As an example of Equation (1), we propose a chaotic complex jerk equation as: 20zzzzzz (2) where α, β and η, are positive parameters, ν is a negative parameter, z is complex variable, dots represent deriva- tives with respect to time and an overbar denotes com- plex conjugate variables. We suggest the equation: 20, 0,zzzzz (3) which is an example of a hyperchaotic complex jerk equ- ation. The corresponding real form of (3) (i.e. z is a real variable) was introduced in [9], and has only chaotic be- havior. The organization of rest of the paper is as follows: In Section 2, symmetry, invariance, fixed points of (2) and stability analysis of the trivial fixed point are discussed. Lyapunov exponents are calculated in Section 3, and used to classify the attractors of (2). It is clear that our Equation (2) has chaotic, periodic, quasi-periodic attract- tors and solutions that approach fixed points. In Section 4, we study the basic properties of the hyperchaotic com- plex jerk Equation (3). Numerically the range of pa- ra- meters values of the system at which hyperchaotic at- tractors exist is calculated in Section 5. Section 6 con- tains the control of chaotic attractors of Equation (2) by adding a complex periodic forcing. The last section con- tains our concluding remarks. 2. Basic Properties of Chaotic Jerk Equation (2) In this section we study the basic properties of our new Equation (2). Equation (2) can equivalently be written as three, first-order, ordinary differential equations as: C opyright © 2012 SciRes. IJMNTA  G. M. MAHMOUD ET AL. 7 2 ,,zxxyyyx z zz , 4 (4) where 12 ,zu iu 3 x uiu and are 5 yu iu 6 complex variables, 1i, are real variables, dots represent derivatives with respect to time and an overbar denotes complex conjugate variables. ,1,2,, j uj6 The real version of (4) is: 13243546 22 5531112 22 6642212 ,,,, , . uuuuuuuu uuuuuuu uuuuuuu (5) The basic dynamical properties of system (5) are: 2.1. Symmetry and Invariance From (5), we note that this system is invariant under the transformation 123456123456 ,,,,,,, ,, ,.uu uu uuuuuuuu ,,,,,uuuuuu Therefore, if is a solution of (5), then 12 is also a solution of the same system. 123456 3456 ,,,uu uu,,uu 2.2. Dissipation The divergence of (5) is: 6 1 2. j jj u u Therefore the system (5) is dissipative for the case: 0. 2.3. Equilibria and Their Stability The fixed points of system (5) can be found by solving the following equations: 3456 22 5 31112 22 642212 0, 0, 0,0, 0, 0. uu u u uuuuuu uuuuuu (6) Therefor system (4) has trivial fixed point 00,E . The projection in the plane of the non trivial fixed points is a circle: 0,0,0,0,0 12 ,uu 22 2 12 ,uu r (7) whose center is at the origin and radius is r . The non trivial fixed point can be written in the form 123456 =,,,,,E uuuuuu where 1cos ,ur 2sin ,ur for 3456 0,uuu u 0, 2π . To study the stability of the Jacobian matrix of Equation (2) at is: 0 E 0 E 0 0010 0 0 000 10 0 0000 1 0 . 0000 0 1 00 00 0 E J 0 The characteristic polynomial is: 2 32 0. (8) According to the Routh-Hurwitz condition, the real parts of the roots of (8) are negative if and only if 0,0, 0,0. Since, 0 then is unstable. 0 The stability analysis of E E can be similarly studied as we did for the trivial fixed point . 0 E 3. Lyapunov Exponents and Attractors of Equation (2) This section is devoted to calculate Lyapunov exponents and used their signs to classify attractors of Equation (2). Based on these exponents, we compute parameters val- ues of our Equation (2) at which chaotic, periodic, and quasi-periodic attractors and attractors that approach fixed point exist. 3.1. Lyapunov Exponents System (5) in vector notation can be written as: ;,Ut hUt (9) where 123456 ,,,,, t Ut utututututut 123456 ,,,,, , t h hhhhhh is the state space vector, is a set of parameters and denoting transpose. The equations for small deviations t U from the trajectory Ut are: ,U; 1,2,3,4,5,6 lj UtLUt ,lj (10) , where ,=l lj j h Lu is the Jacobian matrix of the form: , 22 12 12 22 122 1 00100 00 0100 00 0010 . 00000 32 0 2300 lj L uu uu uuu u 0 1 0 Copyright © 2012 SciRes. IJMNTA  G. M. MAHMOUD ET AL. 8 The Lyapunov exponents l of the system is defined by: 1 lim log. 0 l ltl ut tu (11) To find l , Equations (9) and (10) must be numerically solvedltaneously. Runge–Kutta method of order 4 simu is used to calculate l . 1, For thoicee ch 4, 5 and 1 and the initial conditions 01 0, 04, tu 1 and 2 3 0 2,u 1, 0u 45 02, 0uu 601u ents which are: 0. 2 . Weate the 3 44, 0, calcul 12 0, Lyapunov expon . 45 0.488, 6 0.954, 1.691 at our system (4) for This means th this cf α, β, hoice o μ and η is a chaotic system since one of its Lyapunov exponents 1 is positive and dissipative system because their sum is negative. 3.2. Attractors of Equation (2) 3.2.1. Fix ,4 ,5 1 and Vary In Figures 1(a) and (b) we plotted the corresponding Lyapunov exponents λl, of system (5) us- ing the initial conditions 1, 2,,6l 00,t 1 u 04 , 201,u 01 302u , 402u, 501u and 6 u . It is clear that from Figure 1(a), when 0.65,0.795 , 0.840,1.025 and 1. 2 6 ors. It has , 1. 3 4 the ne also peri w sy odic a stem (5) has ttractors for chaotic attract 1. 3 4,2. 5 when 4, while it has quasi-periodic attractors lies in the interval 0.795, oach nontri . As is shown i 0.840 vial fixe n . Solutions d points are Figure 1(b) the of system (5) exist for values of 4 that appr 2.54, 4.7 , 5 and 6 are negative. 3.2.2. Fix ,1 ,5 1 and Vary has cFrom Figure that (5)haotic attractors for 1(c) one can conclude 3.4, 3.590 , 3.610,3.925, 3.955, 4.135 and 4.155, 4.880, and periodic attractors for β lies in 3.590,3.610, 4.135, 4.155 and 4. proach non 4. 880, 9.8. trivial fixed Solutio points are ns of exist system (5) that ap for 10.1,12 . 3.2.3. Fix ,1 ,4 1 and Vary As we did bef1λ2 and λ3 in Figure 1(d) and we see that (5) has chaotic attractors for ore we plot only λ, 6.7, 6.315 , 6.240,5.955, 5.865, 5.580 , 5.525, 5.105, 5.07, 4.805 and 4.775,3.995 . In between above values of our sys- tractors as one sees from . 3.2.4. Fix tem has periodic atFigure 1(d) ,1 ,4 5 and Vary rAs is showaotic attractos exist for n in Figure 1(e), the ch 0.001,1.14 Using the same ch . oice of the parameters and initial conditions as in Figure 1, the chaotic attractors of (5) are plotted in Figure 2 in 234 ,,uuu , 246 ,,uuu , 2,u 45 ,uu and 145 ,,uu u spaces respectively. 4. Some Properties of Equation (3) This section deals with the basic dynamical properties of a hyperchaotic jerk Equation (3). As we did in Section 2, Equation (3) can be written as a system of three, first- order, ordinary differential equations such as: , 2 ,,zxxyyyzx z (12) where 12 3 , zu iuxuiu 4 riables, and are com- plex va 56 yu iu 1, ,1,2, j iuj on of (3) is: , 6 are real variables. The real versi 1 2 13243546 22 55134234 22 66234134 ,,,, 2, 2. uuuuuuuu uuuuuuuuu uuuuuuuuu (13) If 123456 ,,,,,uuuuuu is a solution of (13), then 1,u 23456 ,,,,uuuuu From (13) if 0, is also a solution. then (13) is dissipative. System (13) has only trivial fixed point 00, 0,E cobian 0,0,0,0 To stud . y the stability of we calculate the Ja matrix of system (13) at get: 0 E 0 toE 0 00100 0 000100 00001 0 . 00000 1 1000 0 01000 E J Its characteristic polynomial is: . 2 32 10P (14) An elementary study proves that this polynomial has only one real root 2 3 r which is therefore nega- tive. Since the characteristic equation is a cubic equation with real coefficients, we will have without loss of gen- erality rc Pc . where c is a complex number. After expanding the above equation and comparing the coefficients with those of the original characteristic equation we come up with the relation 12 Re 2 cr . We conclude that the real part of c is e fixed point is unstable, see Ref. [9 5. Lyapunov Exponents and Attractors of Hyperchaotic Equation (3) In this section we calculate the Lyapunov exponents and attractors of Equation (3). positive and that th]. Copyright © 2012 SciRes. IJMNTA 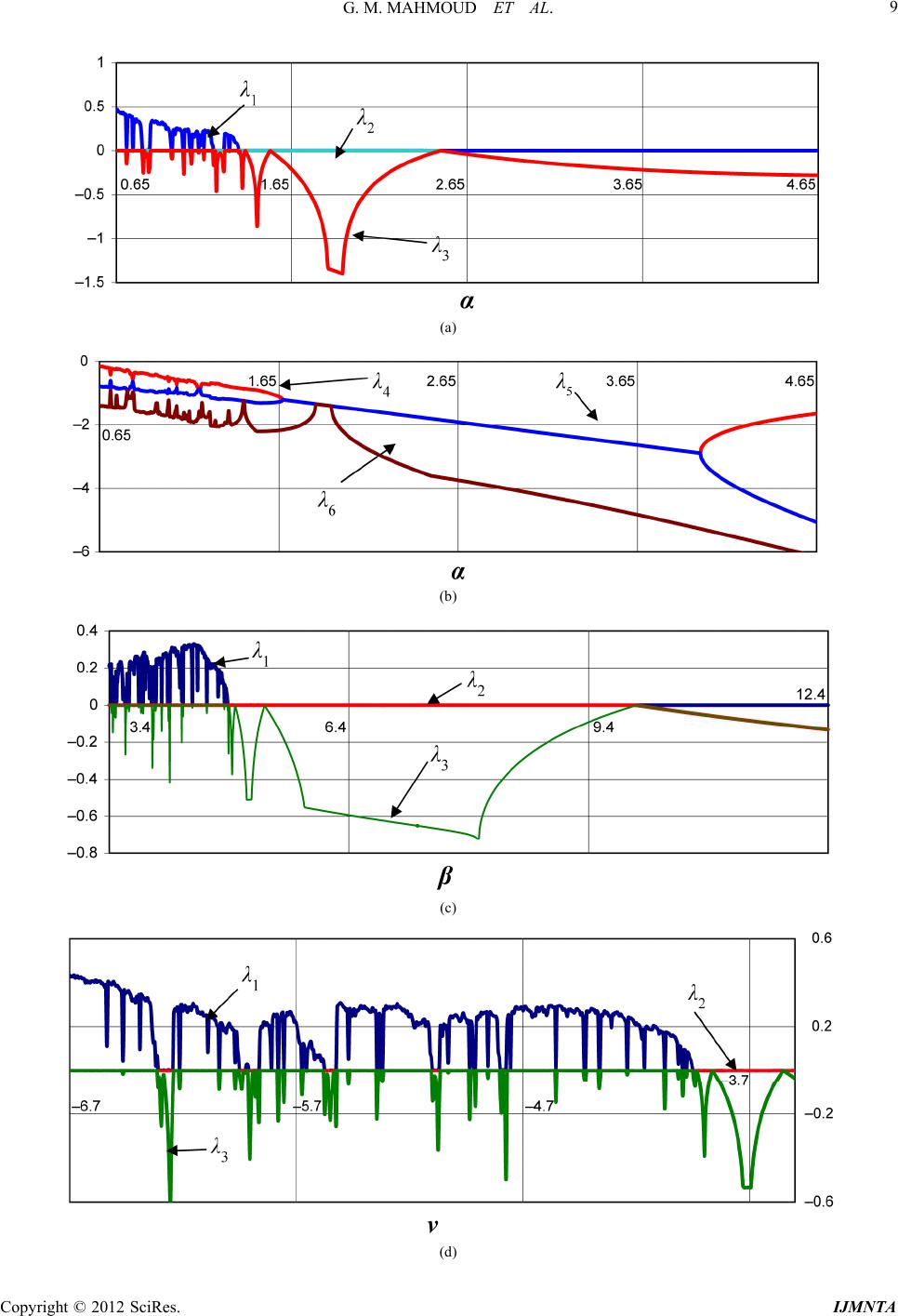 G. M. MAHMOUD ET AL. 9 (a) (b) (c) (d) Copyright © 2012 SciRes. IJMNTA 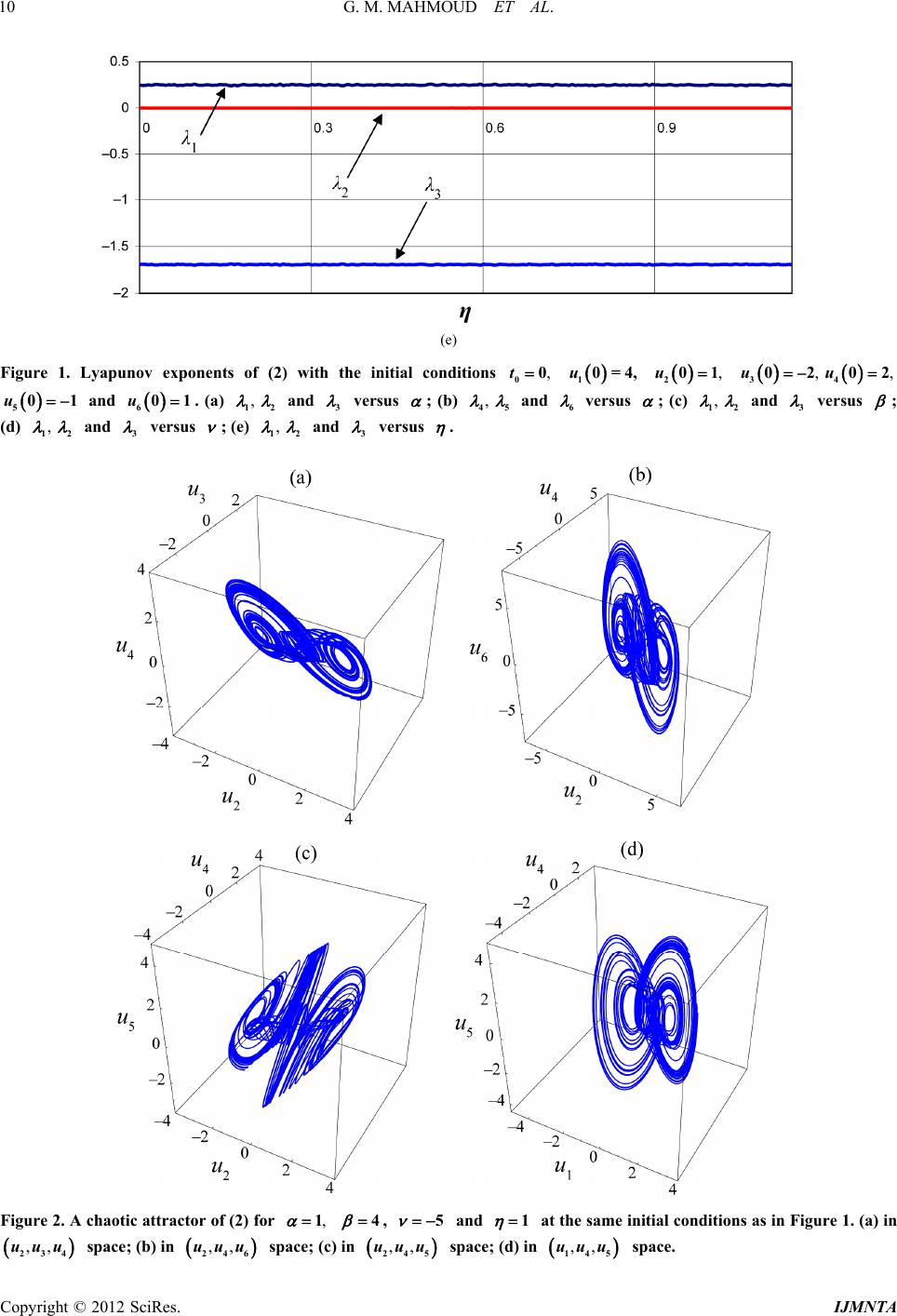 G. M. MAHMOUD ET AL. 10 (e) , 201u , , 34 0202uu 10=4,u , 00t Figure 1. Lyapunov exponents of (2) with the initial conditions 501u d 601u. (a) , 12 an and 3 versus ; (b) , 45 and 6 versus ; (c) , 12 and 3 versus ; (d) , 12 and 3 versus ; (e) , 12 and 3 versus . Figurttractor of (2) for ,1e 2. A chaotic a 4 , 5 and 1 at the same initial conditions as in Figure 1. (a) in ,, 234 uu space; (b) in ,, 246 uuu space; (c) in ,, 245 uuu uspace; (d) in ,, 145 uuu space. Copyright © 2012 SciRes. IJMNTA 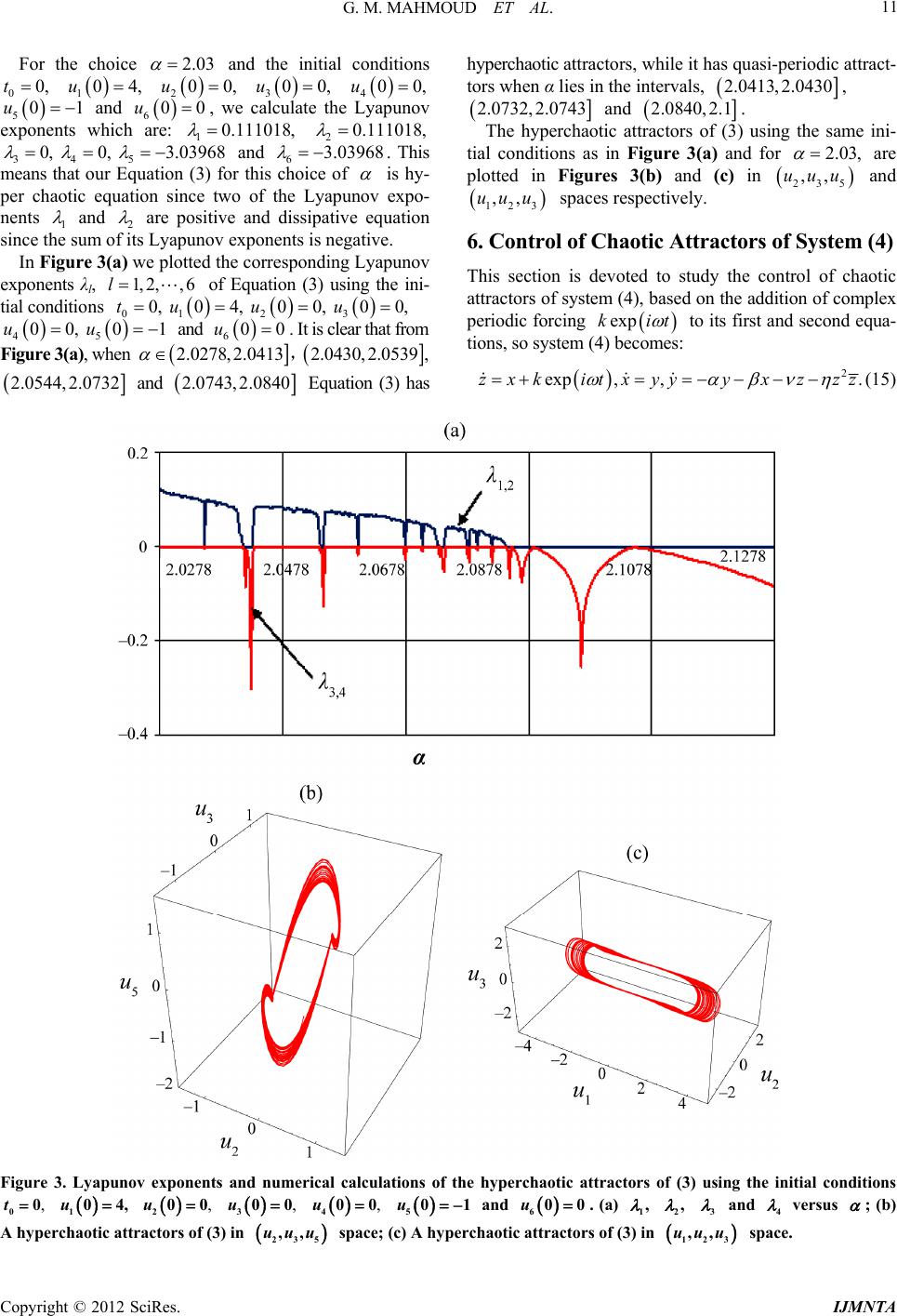 G. M. MAHMOUD ET AL. Copyright © 2012 SciRes. IJMNTA 11 For the choice 2.03 , 200u and the initial conditions , 00,t 104u, 300u 400u, punov 5 u exponents 01 and u which 600 are: 1 , we cal 0.11 culate the Lya 1018, 20.111018, 34 0, 5 3.039680, and 63.03968 his choice of . This means that our Equation (3) for t is hy- nov expo- per cha nents otic equati 1 on since two of the Lyapu and 2 e sum of are positiv its Lyapunov e ex and dissipativ ponents is ne e equation gative. since th In Figure 3(a) we plotted the corresponding Lyapunov exponents λl, of Equation (3) using the ini- tial condition 1, 2,, 6l s 2 3 4, 00, 00,u u 01 0, 0tu 01 and 45 00,uu 600u. It is clear that from Figure 3(a), when 2.0278,2.0413 2.0430,2.0539 ,, Equation (3) has hyperchaotic attractors, while it has quasi-periodic attract- tors when α lies in the intervals, 2.0413, 2.0430, 2.0732, 2.0743 and 2.0840, tractors o 2.1 . f (3) using the samThe hyperchaotic ate ini- tial conditions as in Figure 3(a) and for 2.03, are plotted in Figures 3(b) and (c) in and 235 ,,uuu 123 ,,uu u spaces respectively. 6. Control of Chaotic Attractors of System (4) This section is devoted to study the control of chaotic attractors of system (4), based on the addition ofomplex periodic forcing c expkit es: to its first and second equa- tions, so system (4) becom 2 exp, ,.zxkitxyyyxzzz 2.0544, 2.0732 and 2.0743, 2.0840 (15) Figure 3. Lyapunov exponents and numerical calculations of the hyperchaotic attractors of (3) using the initial conditions ,t 00 u 104, ,u 200 ,u 300 ,u 400 u 501 and u 600. (a) 1, 2, 3 and 4 versus ; (b) A hyperchaotic attractors of (3) in uu 23 ,,u 5 space; (c) A hyperchaotic of (3)attractors in uuu 12 ,, 3 space. 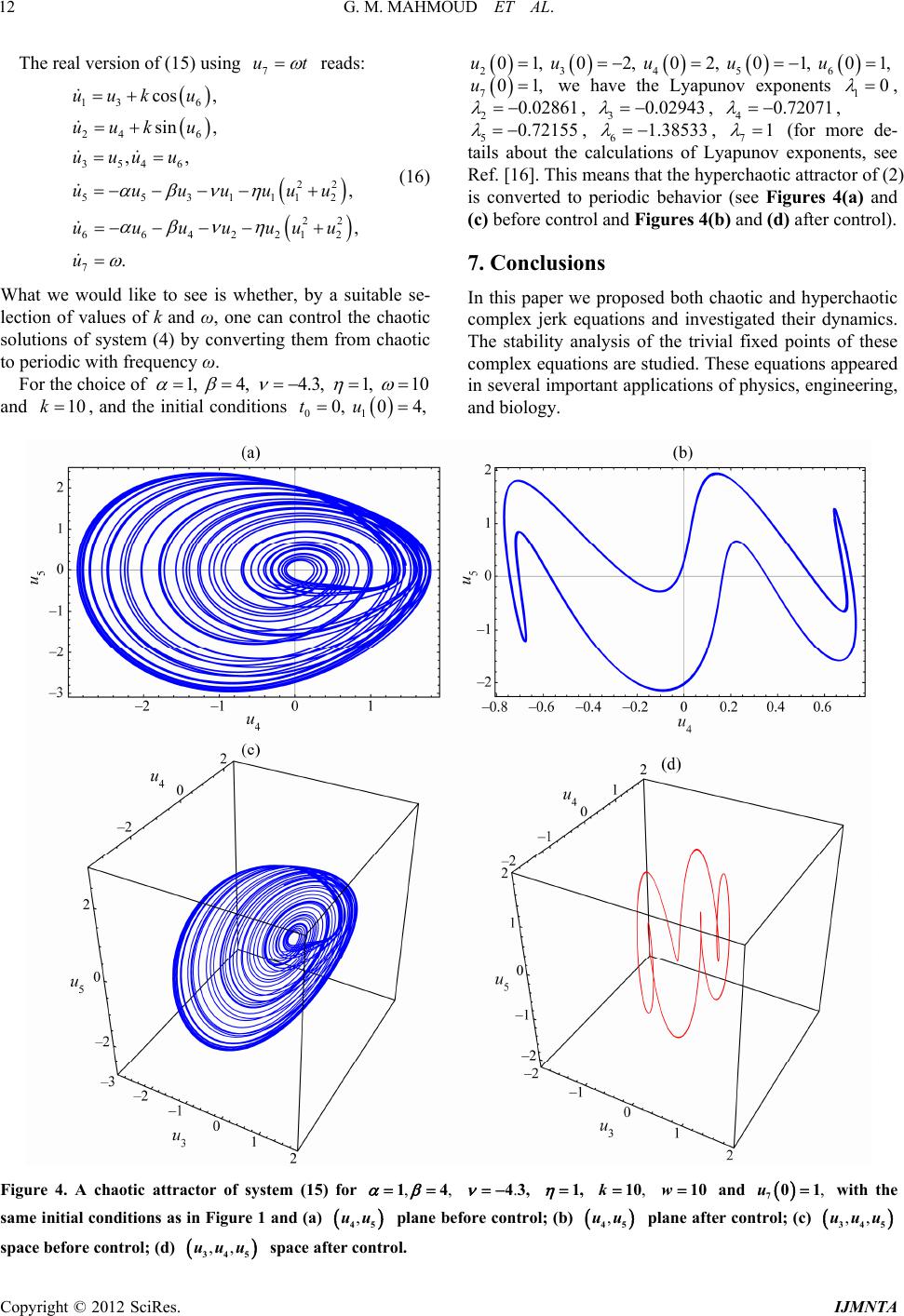 G. M. MAHMOUD ET AL. 12 The real version of (15) using 7 ut reads: (16) What we would like to see is whether, by a suitable se- lection of values of k and ω, one can control the chaotic solutions of system (4) by converting them from chaotic 13 6 24 6 3546 22 5531112 22 6642212 7 cos , sin , ,, , , . uuk u uuk u uuuu uuuuuuu uuuuuuu u to periodic with frequency ω. For the choice of 1, 4, 4.3, 1, 10 , and l cons and th 10ke initiadition 01 0tu 0, 4, 234 56 01, 02, 02, 01, 01, uuu uu 701,u we have the Lyapunov exponents 10 , 20.02861 , 30.02943 , 40.72071 , 50.72155 , 61.38533 , 71 (for more de tails about the calculations of Lyapunov exponents, see - Ref. [16]. This means that the hyperchaotic attractor of (2) is converted to periodic behavior (see Figures 4(a) and (c) before control and Figures 4(b) and (d) after control). 7. Conclusions In this paper we proposed both chaotic and hyperchaotic complex jerk equations and investigated thr dynamics. The stability analysis of the trivial fixed points of these ex equations areudied. The equations appeared eral iportant aplications ohysics, engineering, and b ei compl stes in sevmpf p iology. ,, 14 . 43, 1, ,k 10 w 10Figure 4. A chaotic attractor of system (15) for and with the d (a) ,u 70 1 same initial conditions as in Figure 1 an efore cl ; (b) ,uu 45 plane bontro ,uu 45 plane after control; (c) ,,uuu 345 control; (d) ,,uuu 345 space after control. space before Copyright © 2012 SciRes. IJMNTA  G. M. MAHMOUD ET AL. 13 Both of our exam and (3) are symmetric and ive ples (2) dissipate under thcondition 0 . ed fixed The caotic Equa tion (2) hasolated a solat int in h- s both ind non-isolated fixed points. The projection of non-ipo ,uu 12 space is a circle with center 0,0 . Tf sys- tem (2) is very complicated as shown in Figure since it has, solutions approach to fixed points, periodic solutions, quasi-periodic solutions and chaotic behavior. The hy- perchaotic Equation (3) has only one fixed point. he dynami 1 va c o , The lues of the parameter at which (3) has hyperchaotic attractors is calculated. The control of chaotic attractors of Equation (2) i by complex periodic igure 4. Other ex- s studied adding a forcing and the results are shown in F n (1) can be similarly studied and in vestigated as we quations (2) an REFERENCES [1] E. N. Lorenz, “Deterministic Nonperiodic Flow,” Journal of Atmospheric Sciences, Vol. 20, No. 2, 1963, pp. 130- 141. doi:10.1175/1520-0469(1963)020<0130:DNF>2.0.CO;2 amples of Equatio- did for Ed (3). [2] O. E. Rössler, “An Equation for Continuous chaos,” Physics Letters A, Vol. 57, No. 5, 1976, pp. 397-398. doi:10.1016/0375-9601(76)90101-8 [3] O. E. Rossler, “An Equation for Hyperchaos,” Physics Letters A, Vol. 71, No. 2-3, 1979, pp. 155-157. doi:10.1016/0375-9601(79)90150-6 [4] J. C. Sprott, “Simple Chaotic Systems and Circuits,” American Journal of Physicals, Vol. 68, No. 8, 2000, pp. 758-763. doi:10.1119/1.19538 [5] J. C. Sprott, “Some Simple Chaotic Flows,” Physical Review E, Vol. 50, No. 2, 1994, pp. R647-R650. doi:10.1103/PhysRevE.50.R647 [6] H. P. W. Gottlieb, “Question #38. What Is the Simplest Jerk Function That Gives Chaos?” American Journal of Physicals, Vol. 64, No. 5, 1996, p. 525. doi:10.1119/1.18276 [7] S. J. Linz, “Nonlinear Dynamical Models and Jerk Mo- tion,” American Journal of Physicals, Vol. 65, No. 6, 1997, pp. 523-526. doi:10.1119/1.18594 [8] J. C. Sprott, “Some Simple Chaotic Jerk Functions,” American Journal of Physicals, Vol. 65, No. 6, 1997, pp. 537-543. doi:10.1119/1.18585 [9] J.-M. Malasoma, “What Is the Simplest Dissipative Cha- otic Jerk Equation Which Is Parity Invariant,” Physics Letters A, Vol. 264, No. 5, 2000, pp. 383-389. doi:10.1016/S0375-9601(99)00819-1 Some Simple Je- tions,” Chaons & Fractals l. 36, No. 008, [10] F. Zhang, J. Heidel and R. L. Borne, “Determining Non- chaotic Parameter Regions inrk Func s, Solito, Vo4, 2 pp. 862-873. doi:10.1016/j.chaos.2006.07.005 [11] R. Eichhorn, S. J. Linz and P. Hänggi, “Simple Polyno- mial Classes of Chaotic Jerk Dynamics,”litons & Fractals, Vol. 13, No. 1, 2002, pp. 1-1 .1016/S0960-0779(00)002 Chaos, So 5. doi:10 37-X [12] S. J. Linz, “Non-Chaos Criteria for Certain Jerk Dynam- ics,” Physics Letters A, Vol. 275, No. 3, 2000, pp. 204- 210. doi:10.1016/S0375-9601(00)00576-4 [13] J. C. Sprott, “Chaos and Time-Series Analysis,” Oxford University Prerk, 2003. [14] L. M. Kocić and S. Gegov namical System,” Automatic Con ss, New Yo ska-Zajkova, “On a Jerk Dy- trol and Robotics, Vol. 8, 2009, pp. 35-44. 5] G. M. Mahmoud and T. Bountis, “The Dynamics of Sys- tems of Complex Nonlinear Oscillators,” International Journal of Bifurcation and Chaos, Vol. 14, No. 1, 2004, pp. 3821-3846. doi:10.1142/S0218127404011624 [1 [16] G. M. Mahmoud, M. E. Ahmed and E. E. Mahmoud, “Analysis of Hyperchaotic Complex Lorenz Systems,” International Journal of Modern Physics C, Vol. 19, No. 10, 2008, pp. 1477-1494. doi:10.1142/S0129183108013151 [17] G. M. Mahmoud, M. A. Al-Kashif and A. A. Farghaly, “Chaotic and Hyperchaotic Attractors of a Complex Non- linear System” Journal of Physicss A: Mathematical and Theoretical, Vol. 41, No. 5, 2008, pp. 55-104. doi:10.1088/1751-8113/41/5/055104 [18] G. M. Mahmoud, E. E. Mahmoud and M. E. Ahmed, “On the Hyperchaotic Complex Lü System,” Nonlinear Dy- namics, Vol. 58, No. 4, 2008, pp. 725-738. doi:10.1007/s11071-009-9513-0 [19] G. M. Mahmoud, T. Bountis, M. A. Al-Kashif and S. A. Aly, “Dynamical properties and synchronization of com- plex non-linear equations for detuned laser,” J. Dynami- cal Systems: An International Journal, Vol. 24, No. 1, 2009, pp. 63-79. doi:10.1080/14689360802438298 [20] G. M. Mahmoud and E. E. Mahmoud, “Synchronization and Control of Hyperchaotic Complex Lorenz System,” Mathematics and Computers in Simulation, Vol. 80, No. 12, 2010, pp. 2286-2296. doi:10.1016/j.matcom.2010.03.012 [21] G. M. Mahmoud, and E. E. Mahmoud, “Complete Syn- chronization of Chaotic Complex Nonlinear Systems with Uncertain Parameters,” Nonlinear Dynamics, Vol. 62, No. 4, 2010, pp. 875-882. doi:10.1007/s11071-010-9770-y Copyright © 2012 SciRes. IJMNTA |