Paper Menu >>
Journal Menu >>
 Journal of Geographic Information System, 2010, 2, 55-62 doi:10.4236/jgis.2010.22011 Published Online April 2010 (http://www.SciRP.org/journal/jgis) Copyright © 2010 SciRes. JGIS Semi-Automatic Objects Recognition in Urban Areas Based on Fuzzy Logic Federico Prandi, Raffaella Brumana, Francesco Fassi Department of B.E.S.T., Politecnico di Milano, P.zza Leonardo da Vinci, Milan, Italy E-mail: {federico.prandi, raffaella.brumana, francesco.fassi}@polimi.it Abstract Three dimensional object extraction and recognition (OER) from geographic data has been definitely one of more important topic in photogrammetry for quite a long time. Today, the capability of rapid generating high-density DSM increases the supply of geographic information but the discrete nature of the measuring makes more difficult to recognize correctly and to extract 3D objects from these surface. The proposed methodology wants to semi-automate some geographic objects clustering operations, in order to perform the recognition process. The clustering is a subjective process; the same set of data items often needs to be parti- tioned differently based on the application. Fuzzy logic gives the possibility to use in a mathematical process the uncertain information typical of human reasoning. The concept at the base of our proposal is to use the information contained in Image Matching or LiDAR DSM, and typically understood by the human operator, in a fuzzy recognition process able to combine the different input in order to perform the classification. So the object recognition approach proposed in our workflow integrates 3D structural descriptive components of objects, extracted from DSM, into a fuzzy reasoning process in order to exploit more fully all available in- formation, which can contribute to the extraction and recognition process and, to handling the object’s vagueness. The recognition algorithm has been tested with to different data set and different objectives. An important issue is to apply the typical human process which allows to recognize objects in a range image in a fuzzy reasoning process. The investigations presented here have given a first demonstration of the capability of this approach. Keywords: Objects Recognition, DSM, Fuzzy Logic 1. Introduction 1.1. Motivations Estimating the research fields involved in the 3D topog- raphic objects generation for 3D GIS a re very huge. 3D GIS require 3D representations of objects and 3D object reconstruction of real world is a relatively new issue in photogrammetry. Progress in the field of digital image matching for DSM generation and growth of airborne laser scanning technologies have improved the derivation of digital sur- face models. The basic idea of this work is to use the 3D informa- tion containe d in these DSM in order to aid the 3D iden- tification and extraction of features. Using the DSM we would to overcome some typical difficulties in image in- terpretation. Then this work focuses on the automation and accel- eration of the recognition of 3D topographic objects for 3D GIS. The purpose is to use the 3D information con- tained in the DSM in order to automatic detect and recog- nize topographic objects in complex scenes. Furtherm ore, it is tried to use only LiDAR or Image Match ing DSM. Due to this limitation our goal becomes even more chal lenging. Experience and daily practice allow us to have our brain automatically interpreting what we see. Human recogni- tion takes advantage of a variety of acquired information rather than relying on, say, a single descriptor of the ob- jects. Further, human perception possesses a tremendous potential for learning and deals perfectly with the fuzzi- ness of the real world. In the case of objects in geogr aph i c data an interpretation by human operator may be easier but, if these processes are replaced by a computer, it is more than probable that none of the objects will be iden- tified. Fuzzy set theory, introduced by L. Zadeh in the 1960s, resembles human reasoning in its use of approximate 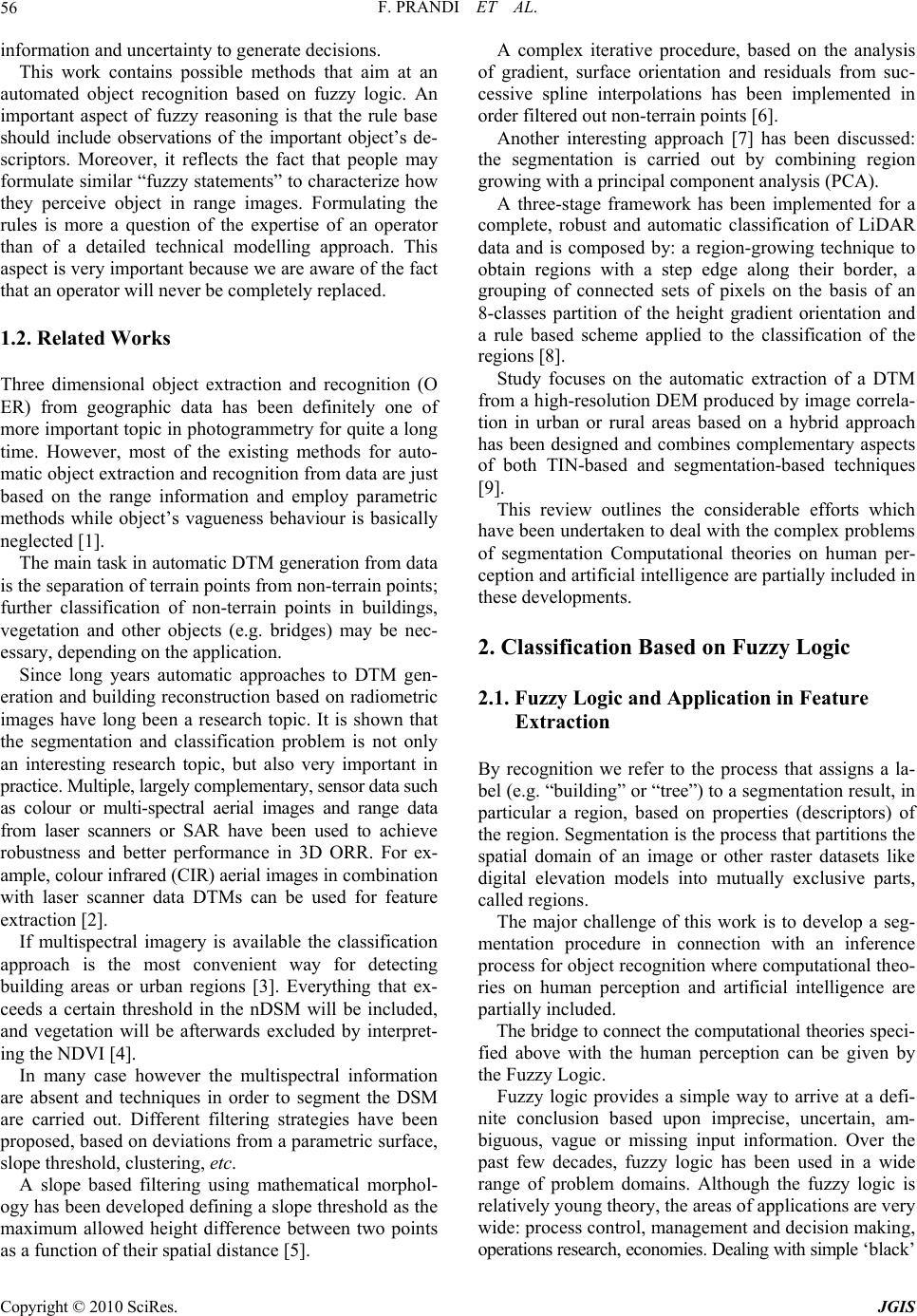 F. PRANDI ET AL. 56 informati on and uncertainty to generat e decisi ons. This work contains possible methods that aim at an automated object recognition based on fuzzy logic. An important aspect of fuzzy reasoning is that the rule base should include observations of the important object’s de- scriptors. Moreover, it reflects the fact that people may formulate similar “fuzzy statements” to characterize how they perceive object in range images. Formulating the rules is more a question of the expertise of an operator than of a detailed technical modelling approach. This aspect is very important because we are aware of the fact that an operator will never be completely replaced. 1.2. Related Works Three dimensional object extraction and recognition (O ER) from geographic data has been definitely one of more important topic in photogrammetry for quite a long time. However, most of the existing methods for auto- matic object extraction and recogn ition from data are ju st based on the range information and employ parametric methods while object’s vagueness behaviour is basically neglected [1]. The main task in automatic DTM generation from data is the separation of terrain points from non-terrain points; further classification of non-terrain points in buildings, vegetation and other objects (e.g. bridges) may be nec- essary, depending o n the appl i cat i on. Since long years automatic approaches to DTM gen- eration and building reconstruction based on radiometric images have long been a research topic. It is shown that the segmentation and classification problem is not only an interesting research topic, but also very important in practice. Multiple, la rgely complem entary, sensor data such as colour or multi-spectral aerial images and range data from laser scanners or SAR have been used to achieve robustness and better performance in 3D ORR. For ex- ample, colour infrared (CIR) aerial images in comb i n a ti o n with laser scanner data DTMs can be used for feature extraction [2]. If multispectral imagery is available the classification approach is the most convenient way for detecting building areas or urban regions [3]. Everything that ex- ceeds a certain threshold in the nDSM will be included, and vegetation will be afterwards excluded by interpret- ing the NDVI [4]. In many case however the multispectral information are absent and techniques in order to segment the DSM are carried out. Different filtering strategies have been proposed, based on deviations from a parametric surface, slope threshold, clustering, etc. A slope based filtering using mathematical morphol- ogy has been developed defining a slope threshold as the maximum allowed height difference between two points as a function of their spatial distance [5]. A complex iterative procedure, based on the analysis of gradient, surface orientation and residuals from suc- cessive spline interpolations has been implemented in order filtered out non-terrain points [6]. Another interesting approach [7] has been discussed: the segmentation is carried out by combining region growing with a principal component analysis (PCA). A three-stage framework has been implemented for a complete, robust and automatic classification of LiDAR data and is composed by: a region-growing technique to obtain regions with a step edge along their border, a grouping of connected sets of pixels on the basis of an 8-classes partition of the height gradient orientation and a rule based scheme applied to the classification of the regions [8]. Study focuses on the automatic extraction of a DTM from a high-resolution DEM produced by image correla- tion in urban or rural areas based on a hybrid approach has been designed and combines complementary aspects of both TIN-based and segmentation-based techniques [9]. This review outlines the considerable efforts which have been under taken to deal w ith the complex pr oblems of segmentation Computational theories on human per- ception and artificial intellig ence are partially included in these developments. 2. Classification Based on Fuzzy Logic 2.1. Fuzzy Logic and Application in Feature Extraction By recognition we refer to the process that assigns a la- bel (e.g. “building” or “tree”) to a segmentation result, in particular a region, based on properties (descriptors) of the region. Segmentation is the process th at partitions the spatial domain of an image or other raster datasets like digital elevation models into mutually exclusive parts, called regions. The major challenge of this work is to develop a seg- mentation procedure in connection with an inference process for object recognition where computational theo- ries on human perception and artificial intelligence are partially included. The bridge to connect the computational theories spec i- fied above with the human perception can be given by the Fuzzy Logic. Fuzzy logic provides a simple way to arrive at a defi- nite conclusion based upon imprecise, uncertain, am- biguous, vague or missing input information. Over the past few decades, fuzzy logic has been used in a wide range of problem domains. Although the fuzzy logic is relatively young theory, the areas of applications are very wide: process control, management and decision making, operation s res ear ch , econ o mies. Dealing with simple ‘b l a ck’ Copyright © 2010 SciRes. JGIS 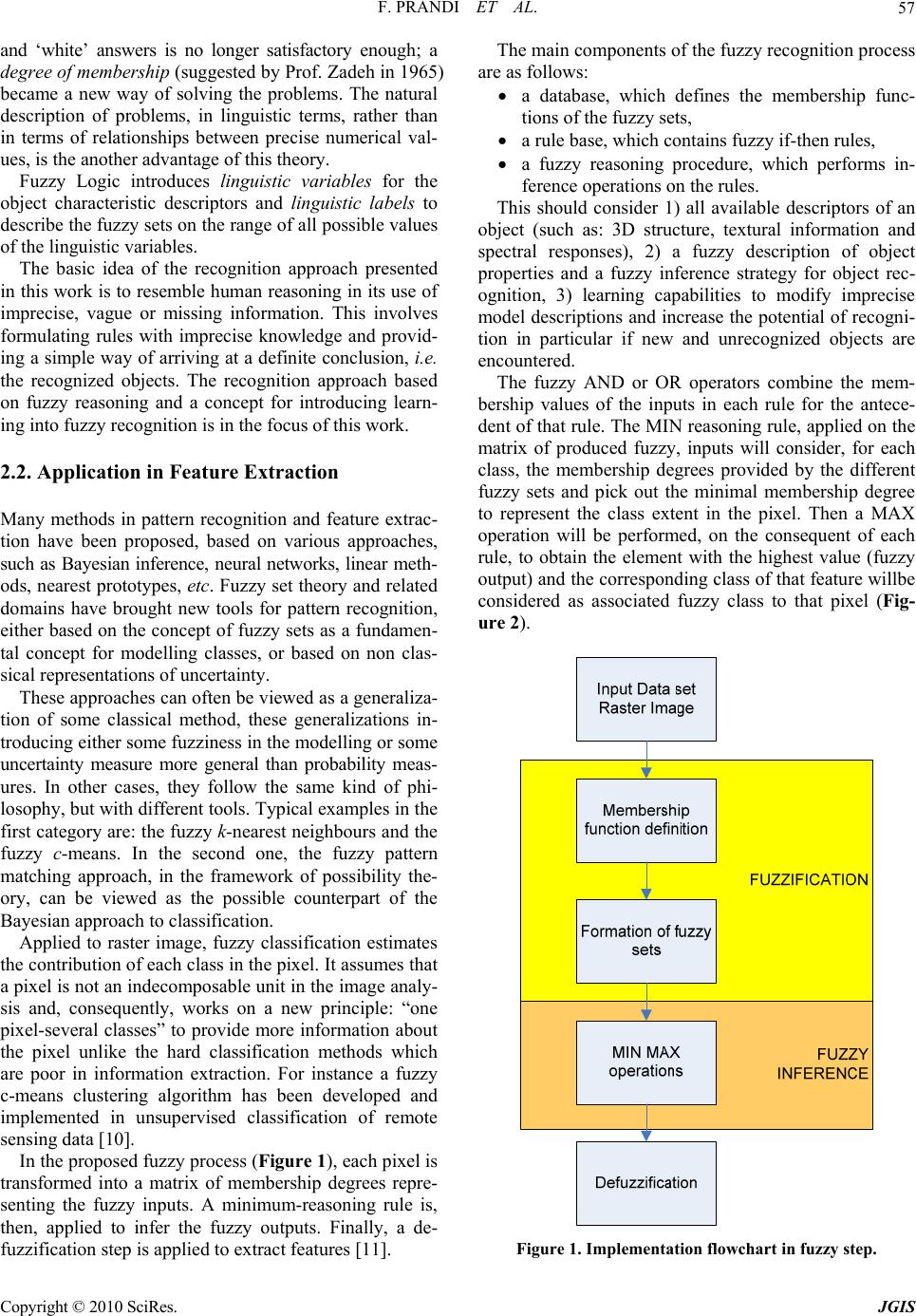 F. PRANDI ET AL.57 and ‘white’ answers is no longer satisfactory enough; a degree of membership (suggested by Prof. Zadeh in 1965) became a new way of solving the problems. The natural description of problems, in linguistic terms, rather than in terms of relationships between precise numerical val- ues, is the another advantage of this theory. Fuzzy Logic introduces linguistic variables for the object characteristic descriptors and linguistic labels to describe the fuzzy sets on the range of all possible values of the linguistic variables. The basic idea of the recognition approach presented in this work is to resemble human reasoning in its use of imprecise, vague or missing information. This involves formulating rules with imprecise knowledge and provid- ing a simple way of arriving at a definite conclusion, i.e. the recognized objects. The recognition approach based on fuzzy reasoning and a concept for introducing learn- ing into fuzzy recognition is in the focus of this work. 2.2. Application in Feature Extraction Many methods in pattern recognition and feature extrac- tion have been proposed, based on various approaches, such as Bayesian inference, neural networks, linear meth- ods, nearest prototypes, etc. Fuzzy set theory and related domains have brought new tools for pattern recognition, either based on the concep t of fuzzy sets as a fundamen- tal concept for modelling classes, or based on non clas- sical representations of uncertainty. These approaches can often be viewed as a generaliza- tion of some classical method, these generalizations in- troducing either some fuzziness in the modelling or some uncertainty measure more general than probability meas- ures. In other cases, they follow the same kind of phi- losophy, but with different too ls. Typical examples in the first category are: the fuzzy k-nearest neighbours and the fuzzy c-means. In the second one, the fuzzy pattern matching approach, in the framework of possibility the- ory, can be viewed as the possible counterpart of the Bayesian approach to classification. Applied to raster image, fuzzy classification estimates the contribution of each class in the pixel. It assumes that a pixel is not an ind ecomposable unit in the image an aly- sis and, consequently, works on a new principle: “one pixel-several classes” to provide more information about the pixel unlike the hard classification methods which are poor in information extraction. For instance a fuzzy c-means clustering algorithm has been developed and implemented in unsupervised classification of remote sensing data [10] . In the proposed fuzzy process (Figure 1), each pixel is transformed into a matrix of membership degrees repre- senting the fuzzy inputs. A minimum-reasoning rule is, then, applied to infer the fuzzy outputs. Finally, a de- fuzzification step is applied to extract features [11]. The main componen ts of the fuzzy recogn ition process are as follows: a database, which defines the membership func- tions of the fuzzy sets, a rule base, which contains fuzzy if-then rules, a fuzzy reasoning procedure, which performs in- ference operations on the rules. This should consider 1) all available descriptors of an object (such as: 3D structure, textural information and spectral responses), 2) a fuzzy description of object properties and a fuzzy inference strategy for object rec- ognition, 3) learning capabilities to modify imprecise model descriptions and increase the potential of recogni- tion in particular if new and unrecognized objects are encountered. The fuzzy AND or OR operators combine the mem- bership values of the inputs in each rule for the antece- dent of that rule. The MIN reasoning rule, applied on the matrix of produced fuzzy, inputs will consider, for each class, the membership degrees provided by the different fuzzy sets and pick out the minimal membership degree to represent the class extent in the pixel. Then a MAX operation will be performed, on the consequent of each rule, to obtain the element with the highest value (fuzzy output) and the corresp onding class of that feature willbe considered as associated fuzzy class to that pixel (Fig- ure 2). Figure 1. Implementation flowchart in fuzzy step. Copyright © 2010 SciRes. JGIS 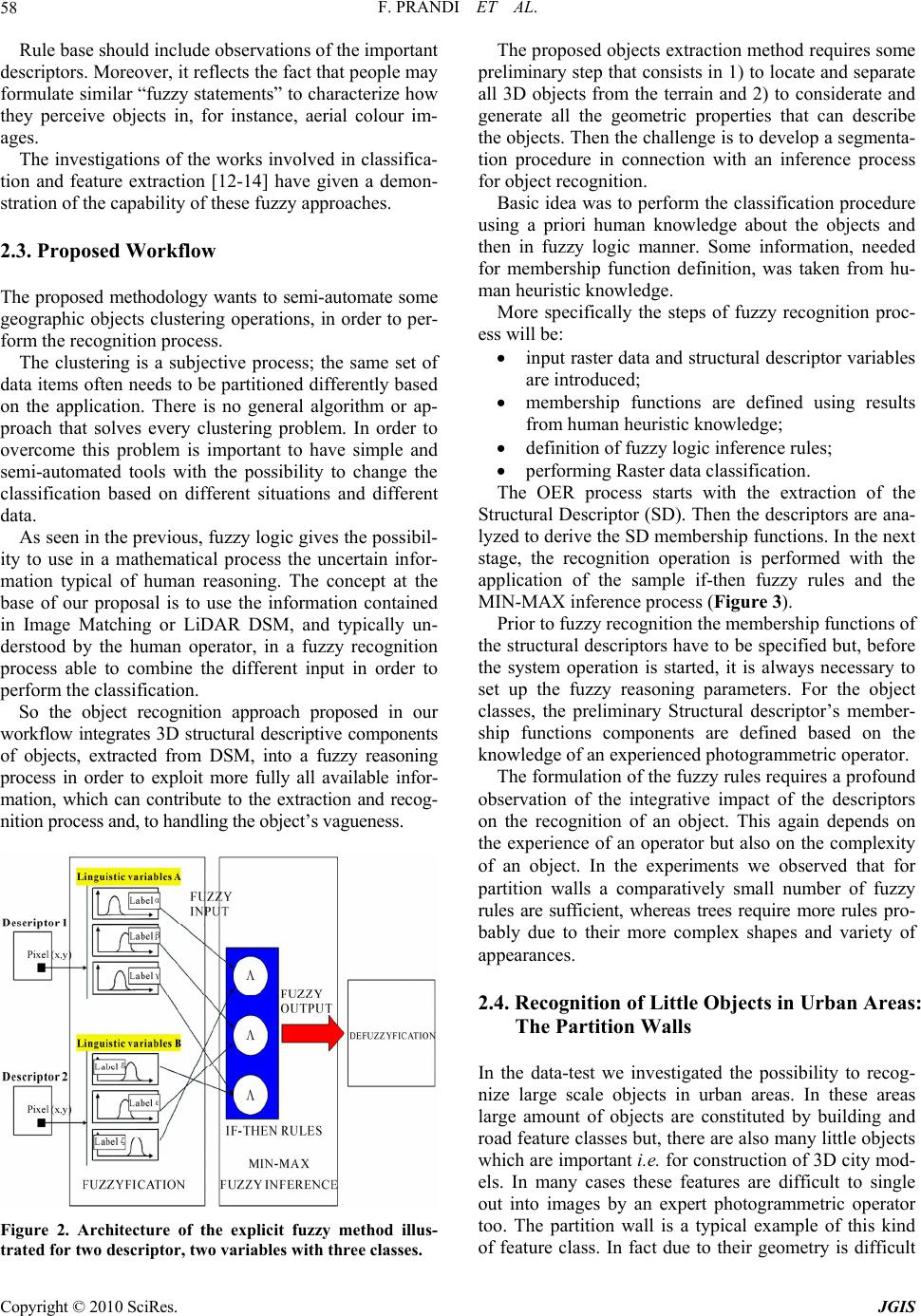 F. PRANDI ET AL. 58 Rule base should include observations of the important descriptors. Moreover, it reflects the fact that people may formulate similar “fuzzy statements” to characterize how they perceive objects in, for instance, aerial colour im- ages. The investigations of the works invo lved in classifica- tion and feature extraction [12-14] have given a demon- stration of the capability of these fuzzy approaches. 2.3. Proposed Workflow The proposed methodology wants to semi-automate some geographic objects clustering operations, in order to per- form the recognition process. The clustering is a subjective process; the same set of data items often needs to b e partitioned differently based on the application. There is no general algorithm or ap- proach that solves every clustering problem. In order to overcome this problem is important to have simple and semi-automated tools with the possibility to change the classification based on different situations and different data. As seen in the previous, fuzzy logic gives the possibil- ity to use in a mathematical process the uncertain infor- mation typical of human reasoning. The concept at the base of our proposal is to use the information contained in Image Matching or LiDAR DSM, and typically un- derstood by the human operator, in a fuzzy recognition process able to combine the different input in order to perform the classification. So the object recognition approach proposed in our workflow integrates 3D structural descriptive components of objects, extracted from DSM, into a fuzzy reasoning process in order to exploit more fully all available infor- mation, which can contribute to the extraction and recog- nition process and, to handling the object’s vagueness. Figure 2. Architecture of the explicit fuzzy method illus- trated for two descriptor, two variables with three classes. The proposed objects extraction method requires some preliminary step that con sists in 1) to locate and separate all 3D objects from the terrain and 2) to considerate and generate all the geometric properties that can describe the objects. Then the challenge is to develop a segmenta- tion procedure in connection with an inference process for object recognition. Basic idea was to perform the classification procedure using a priori human knowledge about the objects and then in fuzzy logic manner. Some information, needed for membership function definition, was taken from hu- man heuristic knowledge. More specifically the steps of fuzzy recognition proc- ess will be: input raster data and structural descriptor variables are introduced; membership functions are defined using results from human heuristic knowledge; definition of fuzzy logic inference rules; performing Raster data classification. The OER process starts with the extraction of the Structural Descriptor (SD). Then the descr iptors are an a- lyzed to derive the SD membership functions. In the next stage, the recognition operation is performed with the application of the sample if-then fuzzy rules and the MIN-MAX inference process (Figure 3). Prior to fuzzy recognition the membership functions of the structural descriptors have to be specified but, before the system operation is started, it is always necessary to set up the fuzzy reasoning parameters. For the object classes, the preliminary Structural descriptor’s member- ship functions components are defined based on the knowledge of an expe r ien ce d photogrammetric operator. The formulation of the fuzzy rules requires a profound observation of the integrative impact of the descriptors on the recognition of an object. This again depends on the experience of an operator but also on the complexity of an object. In the experiments we observed that for partition walls a comparatively small number of fuzzy rules are sufficient, whereas trees require more rules pro- bably due to their more complex shapes and variety of appearances. 2.4. Recognition of Little Objects in Urban Areas: The Partition Walls In the data-test we investigated the possibility to recog- nize large scale objects in urban areas. In these areas large amount of objects are constituted by building and road feature classes but, th ere are also many little o bjects which are important i.e. for construction of 3D city mod- els. In many cases these features are difficult to single out into images by an expert photogrammetric operator too. The partition wall is a typical example of this kind of feature class. In fact due to their geometry is difficult Copyright © 2010 SciRes. JGIS 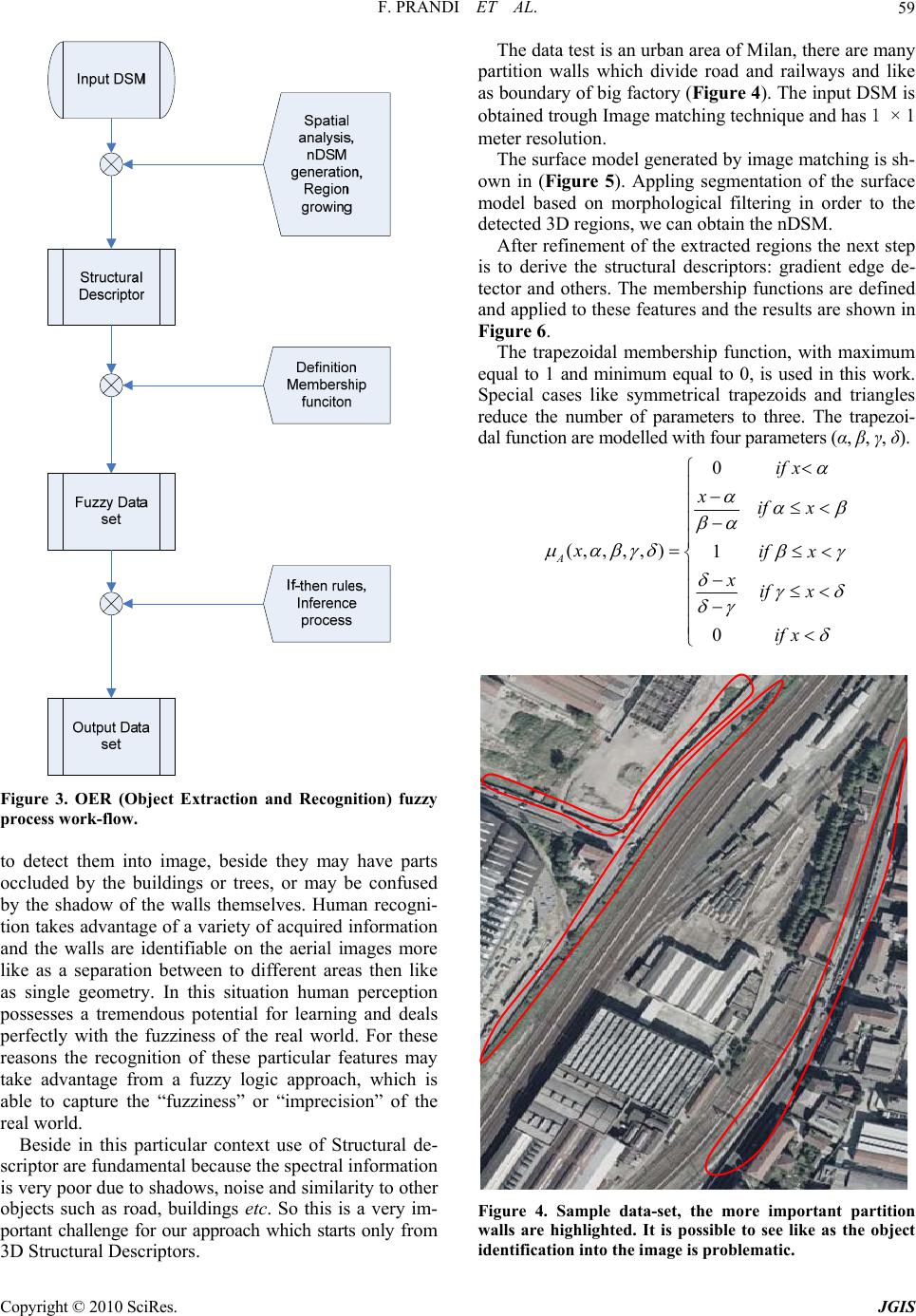 F. PRANDI ET AL.59 Figure 3. OER (Object Extraction and Recognition) fuzzy process work-flow. to detect them into image, beside they may have parts occluded by the buildings or trees, or may be confused by the shadow of the walls themselves. Human recogni- tion takes advantage of a variety of acquired information and the walls are identifiable on the aerial images more like as a separation between to different areas then like as single geometry. In this situation human perception possesses a tremendous potential for learning and deals perfectly with the fuzziness of the real world. For these reasons the recognition of these particular features may take advantage from a fuzzy logic approach, which is able to capture the “fuzziness” or “imprecision” of the real world. Beside in this particular context use of Structural de- scriptor are fundamental because the spectral information is very poor due to shadows, noise and similarity to other objects such as road, buildings etc. So this is a very im- portant challenge for our approach which starts only from 3D Structural Descriptors. The data test is an urban area of Milan, there are many partition walls which divide road and railways and like as boundary of big factor y (Figure 4). The input DSM is obtained trough Image matching technique and has 1 × 1 meter resolution. The surface model generated by image matching is sh- own in (Figure 5). Appling segmentation of the surface model based on morphological filtering in order to the detected 3D regions, we can obtain the nDSM. After refinement of the extracted regions the next step is to derive the structural descriptors: gradient edge de- tector and others. The membership functions are defined and applied to these features and the results are shown in Figure 6. The trapezoidal membership function, with maximum equal to 1 and minimum equal to 0, is used in this work. Special cases like symmetrical trapezoids and triangles reduce the number of parameters to three. The trapezoi- dal function are modell ed with four param et ers (α, β, γ, δ). 0 (,,,, )1 0 A if x xif x xif x xif x if x Figure 4. Sample data-set, the more important partition walls are highlighted. It is possible to see like as the object identification into the im age is problematic. Copyright © 2010 SciRes. JGIS  F. PRANDI ET AL. 60 Figure 5. Digital surface model generated by image match- ing. 1 × 1 meter resolution. Figure 6. Application of the membership function to the structural descriptors (Height range, edge) generation of the fuzzy Data Set. The linguistic variables, which are variables that as- sume linguistic terms values, of the object’s structural descriptors have to be defined in fuzzy logic. Linguistic variables are associated to each input structural descrip- tor and for each linguistic variables some linguistic labels has been assigned. This assignment is mostly a mixture of expert knowledge and examination of the desired input- output dat a . Through definition of linguistic variables and mem- bership function parameters calculation of the input to the fuzzy recognition pro cess is given. In a second step the determined membership values have to be combined to get a final decision (inference process). This component of the fuzzy recognition proc- ess consists in the definition of a set of rule base, which contains fuzzy if-then rules. Once defined the sample if-then rules we can start the inference process. The results of classification are shown in Figure 7. This methodology returns as output a very thigh rec- ognition objects set, due to use of min implication, which consist in low pass filter. In this situation is enough a wrong value in an input data set to get worse in the ob- jects extraction. For instance, inaccurate DTM extraction may cause the elimination of some objects part from nDSM. This is all the more probable in case of little ob- jects such as walls. The result is a chopped classification set where the objects classified as walls are correctly understood and the false positive are limited but, we have many not recognized objects and the geometry re- sults fragmented. The second method we have tested a weighted sum approach [15] and thi s ha s sh own better res ults. The resulting outpu t value (Figure 8 left) is calculated by t he su m of the me mbe rsh ip values for each rules con- cerning an individual weight factor Wi. The weights for parameters height, edge and height range depend on the experience and data input/output 12 ( )(),......,() iii ii iA ABBNnN mxW xWxW i with 11 n i i W Our investigations have shown that the classified ob- jects are better defined than in fuzzy-min approach and we may recognize more features than previously. Finally an accuracy investigation is carried out to evaluate the recognition results. For this purpose the ex- Figure 7. Results of fuzzy walls recognition process. Copyright © 2010 SciRes. JGIS  F. PRANDI ET AL.61 Figure 8. Results of fuzzy walls recognition process using the weighted sum approach. At left is shown the results of fuzzy inference process and at right the final cluster once applied a threshold (value 0.6) to the weighted fuzzy output. tracted objects are compared to the object manually measured and contained in the 1:1000 digital maps of Milan. Due to the particular wall’s geometry (very thigh in one direction), the classification is influenced by the quality of input DSM. Where DSM is well defined (Fig- ure 9) we have a good result. 3. Conclusions and Future Works In object recognition, human interaction remains an im- portant part of the work flow even though the amount of work to be done by the human operator can be reduced considerably in the global extraction process. Many of automated and semi-automated methods proposed in lit- erature focus their efforts on the reconstruction process or on the feature extraction once recognized the objects by the operator. The core of the system is an approach for recognition of object’s primitives based on fuzzy logic theory which analyzes the data in order to extract a maximal amount of information, through an explicit process that uses struc- tural informatio n of objects and integrates them in a f uz zy reasoning process. The methods presented in this work integrate some typical heuristic human concept and is adaptive to oper- ate with different data sets and in different applications. Despite that further investigation and developments migh t be carried out. In relation to dat a input di fferent descriptor Figure 9. Comparison between the extracted features and 1:1000 digital maps of Milan. In red the wall features manually extracted. We can observe a good result for 50% of elements, while some walls are not recognized and we have many false-positive due to the presence of many ob- jects which have wall’s similar characteristics. of objects, such as textural or multispectral properties, can be considered in recognition process. Moreover the generation of structural descriptor have to be improved considering the sensitivity o f the algorithms to the co arse input. Another important improvement is neural-network lea- rning. The learning capability of neural networks can be introduced to the fuzzy recognition process by taking adaptable parameter sets into account which leads to the neuro-fuzzy approach. Finally data acquired from different sensor (such as High density Airborne Laser Scanning) or new systems (UAV) can be used in recognition process and their po- tentiality can be evaluated. 4. References [1] F. Samadzadegan, A. Azizi, M. T. Hahn and C. Lucas, “Automatic 3D Object Recognition and Reconstruction Based on Neuro-Fuzzy Modelling,” ISPRS Journal of Photogrammetry & Remote Sensing, Vol. 59, No. 5, 2005, pp. 255-277. [2] M. Hahn and C. Stätter, “A Scene Labeling Strategy for Terrain Feature Extraction Using Multisource Data,” In- ternational Archives of Photogrammetry and Remote Sensing, Vol. 32, Part 3/1, 1998, pp. 435-443. [3] T. Knudsen and B. Olsen, “Automated Change Detection for Updates of Digital Map Database s,” Photogrammetric Copyright © 2010 SciRes. JGIS  F. PRANDI ET AL. Copyright © 2010 SciRes. JGIS 62 Engineering & Remote Sensing, Vol. 69, No. 11, 2003, pp. 1289-1296. [4] G. Sohn and I. J. Dowman, “Terrain Surface Reconstruc- tion by the Use of Tetrahedron Model with the MDL Cri- terion, International Archives of Photogrammetry,” Re- mote Sensing and Spatial Information Sciences, Vol. 34, Part 3A, 2002, pp. 336-344. [5] G. Vosselmann, “Slope Based Filtering of Laser Altim- etry Data,” International Archives of Photogrammetry and Remote Sensing, Amsterdam, Vol. 33, No. B3, 2000, pp. 935-942. [6] M. A. Brovelli, M. Cannata and U. M. Longoni, “Man- aging and Processing LIDAR Data within GRASS,” Pro- ceedings of the Open Source GIS-GRASS Users Confer- ence, Trento, September 2002. [7] M. Roggero, “Object Segmentation with Region Growing and Principal Component Analysis,” International Ar- chives of Photogrammetry and Remote Sensing and Spa- tial Information Sciences, Vol. 34, Part 3A, 2002, pp. 289-294. [8] G. Forlani, C. Nardinocchi, M. Scaioni and P. Zingaretti, “Complete Classification of Raw LIDAR Data and 3D Reconstruction of Buildings,” Pattern Analysis Applica- tion, Vol. 8, No. 4, 2006, pp. 357-374. [9] C. Baillard, “A Hybrid Method for Deriving DTMs from Urban DEMs,” International Archives of Photogram- metry and Remote Sensing, Vol. 37, Part B3b, 2008, pp. 109-113. [10] R. L. Cannon, J. V. Dave, J. C. Bezdek and M. M. Trivedi, “Segmentation of a Thematic Mapper Image Using the Fuzzy C-Means Clustering Algorithm,” IEEE Transactions on Geoscience and Remote Sensing, Vol. 24, No. 3, 1986, pp. 400-408. [11] F. Melgani, B. A. R. Al Hashemy and S. M. R. Taha, “An Explicit Fuzzy Supervised Classification Method for Mul- tispectral Remote Sensing Images,” IEEE Transactions on Geoscience and Remote Sensing, Vol. 38, No. 1, January 2000, pp. 287-295. [12] J. Amini, C. Lucas, M. Saradjian, A. Azizi and S. Sa- deghian, “Fuzzy Logic System for Road Identification Using Ikonos Images,” Photogrammetric Record, Vol. 17, No. 99, 2002, pp. 493-503. [13] A. Mohammadzadeh, A. Tavakoli and M. J. V. Zoej, “Automatic Linear Feature Extraction of Iranian Roads from High Resolution Multi-Spectral Satellite Imagery,” International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. 35, Part B3, 2004, p. 764. [14] B. Wuest and Y. Zhang, “Region Based Segmentation Of Quickbird Imagery through Fuzzy Integration,” Interna- tional Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. 35, Part B7, 2008, p. 491. [15] T. Vögtle and E. Steinle, “On the Quality of Object Clas- sification and Automated Building Modelling Based on Laser-Scanning Data,” International Archives of Photo- grammetry Remote Sensing and photogrammetry, Vol. 32, No. 4, 2003, pp. 77-84. |