Paper Menu >>
Journal Menu >>
 Vol.2, No.4, 373-378 (2010) Natural Science http://dx.doi.org/10.4236/ns.2010.24045 Copyright © 2010 SciRes. OPEN ACCESS A nonmonotone adaptive trust-region algorithm for symmetric nonlinear equations* Gong-Lin Yuan1, Cui-Ling Chen2, Zeng-Xin Wei1 1College of Mathematics and Information Science, Guangxi University, Nanning, China; glyuan@gxu.edu.cn 2College of Mathematics Science, Guangxi Normal University, Guilin, China Received 23 December 2009; revised 1 February 2010; accepted 3 February 2010. ABSTRACT In this paper, we propose a nonmonotone adap- tive trust-region method for solving symmetric nonlinear equations problems. The convergent result of the presented method will be estab- lished under favorable conditions. Numerical results are reported. Keywords: Trust Region Method; Global Convergence; Symmetric Nonlinear Equations 1. INTRODUCTION Consider the following system of nonlinear equations: () 0,n g xxR (1) where :nn g RR is continuously differentiable, the Jacobian () g x of g is symmetric for all n x R. Define a norm function by 2 1 ()|| ()|| 2 x gx . It is not difficult to see that the nonlinear equations problem Eq.1 is equivalent to the following global optimization problem min (), n x xR (2) Here and throughout this paper, we use the following notations. |||| denote the Euclidian norm of vectors or its induced matrix norm. {} k x is a sequence of points generated by an algo- rithm, and () k g x and () k x are replaced by k g and k respectively. k B is a symmetric matrix which is an approxima- tion of () () T g xgx. It is well known that there are many methods for the unconstrained optimization problem min( ) n xR f x (see [1-7], etc.), where the trust-region methods are very suc- cessful, e. g., Moré and Sorensen [8]. Other classical ref- erences on this topic are [9-12]. Trust- region methods have been applied to equality constrained problems [13-16]. Many authors have studied the trust-region method [2,17-22] too. Zhang [23] combined the trust region subproblem with nonmonotone technique to pre- sent a nonmonotone adaptive trust region method and studied its convergence properties. 1 min ()2 TT kk f xd dHd . . ||||, n k s td hdR (3) where k H is the Hessian of some function :n f RR at k x or an approximation to it, 1 1||()||, p kkk hcfx M 1 01,c 1 || ||, kk MB 1 p is a nonnegative integer, they adjust 1 p instead of adjusting the trust radius, and k B is a safely positive definite matrix based on Schna- bel and Eskow [24] modified cholesky factorization, , kkk B HE where 0 k E if k H is safely positive definite, and k E is a diagonal matrix chosen to make k B positive definite otherwise. For nonlinear equations, Griewank [25] first estab- lished a global convergence theorem for quasi-Newton method with a suitable line search. One nonmonotone backtracking inexact quasi-Newton algorithm [26] and the trust region algorithms [27-30] were presented. A Gauss-Newton-based BFGS method is proposed by Li and Fukushima [31] for solving symmetric nonlinear equations. Inspired by their ideas, Wei [32] and Yuan [33-37] made a further study. Recently, Yuan and Lu [38] presented a new backtracking inexact BFGS method for symmetric nonlinear equations. Inspired by the technique of Zhang [23], we propose a new nonmotone adaptive trust region method for solving *Foundation item: National Natural Science Foundation of China (10761001), the Scientific Research Foundation of Guangxi University (Grant No. X081082), Guangxi SF grands 0991028, the Scientific Research Foundation of Guangxi Education Department (Grant No. 200911LX53), and the Youth Backbone Teacher Foundation o f Guangxi Normal University.  G. L. Yuan et al. / Natural Science 2 (2010) 373-378 Copyright © 2010 SciRes. OPEN ACCESS 374 Eq.1. More precisely, we solve Eq.1 by the method of iteration and the main step at each iteration of the fol- lowing method is to find the trial step k d. Let k x be the current iteration. The trial step k d is a solution of the following trust region subproblem 1 min ()()2 TT kk k qdx ddBd . . ||||, n k s td dR (4) where () ()() kkk x gx gx ,|| ()|| , p kkk cxM 01,c 1 || ||, kk MB p is a nonnegative integer, and matrix k B is an approximation of () () T kk g xgx which is generated by the following BFGS formula [31]: 1 TT kkkkkk kk TT kkk kk Bss Byy BB s Bsy s (5) where 1kk k s xx ,() kkkk ygx g ,1kk k g g . By () kkkk ygx g , we have the approximate rela- tions 111 () kkkkkkkkk ygxggg gs Since 1k B satisfies the secant equation 1kkk B sy and k g is symmetric, we have approximately 1 111 1 k T kkkkkk Bggsggs This means that 1k B approximates11 k T k g g along direction k s . We all know that the update Eq.5 can en- sure the matrix 1k B inherits positive property of k B if the condition 0 T kk sy is satisfied. Then we can use this way to insure the positive property of k B . This paper is organized as follows. In the next section, the new algorithm for solving Eq.1 is represented. In Section 3, we prove the convergence of the given algo- rithm. The numerical results of the method are reported in Section 4. 2. THE NEW METHOD In this section, we give our algorithm for solving Eq.1. Firstly, one definition is given. Let () 0() max{}, 0,1,2, lkk j jnk k (6) where ()min{ ,}nkM k, 0M is an integer con- stant. Now the algorithm is given as follows. Algorithm 1. Initial: Given constants ,(0,1)c , 0p, 0 , 0M, 0 n x R, 0 nn BRR. Let :0k; Step 1: If || || k , stop. Otherwise, go to step 2; Step 2: Solve the problem Eq.4 with k to get k d; Step 3: Calculate ()nk , ()lk and the following rk: () () (0)( ) lkk k k kkk x d rqqd (7) If k r , then we let 1pp, go to step 2. Oth- erwise, go to step 4; Step 4: Let 1kkk x xd , 1kk k g g , k y () kkk g xg . If 0 T kk dy, update 1k B by Eq.5, otherwise let 1kk BB . Step 5: Set :1kk and 0p. Go to step 1. Remark. i) In this algorithm, the procedure of “Step 2-Step 3-Step 2” is named as inner cycle. ii) The Step 4 in Algorithm 1 ensures that the matrix sequence {} k B is positive definite. In the following, we give some assumptions. Assumption A. j) Let be the level set defined by 0 {|||() ||||() ||}xgxgx (8) is bounded and () g x is continuously differentiable in for all any given 0 n x R. jj) The matrices {} k B are uniformly bounded on 1 , which means that there exists a positive constant M such that ||||, k BMk (9) Based on Assumption A and Remark (ii), we have the following lemma. Lemma 2.1. Suppose that Assumption A(jj) holds. If k d is the solution of Eq.4, then we have ||() || 1 ()||() || min{,} 2|||| k kkk k k x qd xB (10) Proof. Using k d is the solution of Eq.4, for any [0,1] , we get () (()) ||() || k kk kk k qd qx x 22 2 1 ||( )||( )( )/||( )|| 2 T kkkkkk k xxBxx 22 1 ||() |||||| 2 kk kk x B Then, we have 22 01 1 ()max[||() ||||||] 2 kkkkk k qdx B ||() || 1||() || min{,} 2|||| k kk k x xB  G. L. Yuan et al. / Natural Science 2 (2010) 373-378 Copyright © 2010 SciRes. OPEN ACCESS 375 The proof is complete. In the next section, we will concentrate on the con- vergence of Algorithm 1. 3. CONVERGENCE ANALYSIS The following lemma guarantees that Algorithm 1 does not cycle infinitely in the inner cycle. Lemma 3.1. Let the Assumption A hold. Then Algo- rithm 1 is well defined, i.e., Algorithm 1 does not cycle in the inner cycle infinitely. Proof. First, we prove that the following relation holds when p is sufficiently large 1 () () kk kk x qd (11) Obviously, ||() || k x holds, otherwise, Algo- rithm 1 stops. Hence ||() ||0, || || p k k k cx p B (12) By Lemma 2.1, we conclude that ||() || 11 ()||()|| min{,} 2||||2 k kkkkk k x qd xB , as p (13) Consider 2 1 |()()|(||||) kkkk k xqdOd (14) By Eqs.12-14, and || || kk d, we get 2 11 ()()()2(||||) |1||| 0 () () kk kkkkk kkkk k xxqdOd qd qd Therefore, for p sufficiently large, which implies Eq.11. The definition of the algorithm means that () 11 () () () () lk kkk k kk kk xx rqd qd . This implies that Algorithm 1 does not cycle in the inner cycle infinitely. Then we complete the proof of this lemma. Lemma 3.2. Let Assumption A hold and {} k x be generated by the Algorithm 1. Then we have {} k x. Proof. We prove the result by induction. Assume that {} k x, for all 0k. By using the definition of the algorithm, we have () 0 lk r (15) Then we get () 11 () lkkkkk qd (16) By ()lkk , ()0lk , from Eq.16, we have 10k , this implies 10 |||| |||| k g g , i.e., 1k x which completes the proof. Lemma 3.3. Let Assumption A hold. Then () {} lk is not increasing monotonically and is convergent. Proof. By the definition of the algorithm, we get () 1 , lk kk (17) We proceed the proof in the following two cases. 1) kM. In this case, from the definition of ()lk and Eq.17, it holds that (1) 1 0(1) max {} lkk j jnk 1 0()1 max{ max {},} kj k jnk (18) ()lk 2) kM . In this case, using induction, we can prove that () 0lk Therefore, the sequence () {} lk is not increasing monotonically. By Assumption A(j) and Lemma 3.2, we know that {} k is bounded. Then () {} lk is convergent. In the following theorem, we establish the conver- gence of Algorithm 1. Theorem 3.1. Let the conditions in Assumption A hold. If 0 , then the algorithm either stops finitely or generates an infinite sequence {} k x such that lim inf0 kk (19) Proof. We prove the theorem by contradiction. As- sume that the theorem is not true. Then here exists a constant 10 satisfying 1, kk . (20) By Assumption A(jj) and the definition of k B, there exists a constant 0m such that 1 || || k Bm (21) Therefore, according to Assumption A(j), Lemma 2.1, Eq.20, and Eq.21, there is a constant 10b such that 1 () k p kk qd bc (22) where k p is the value of p at which the algorithm 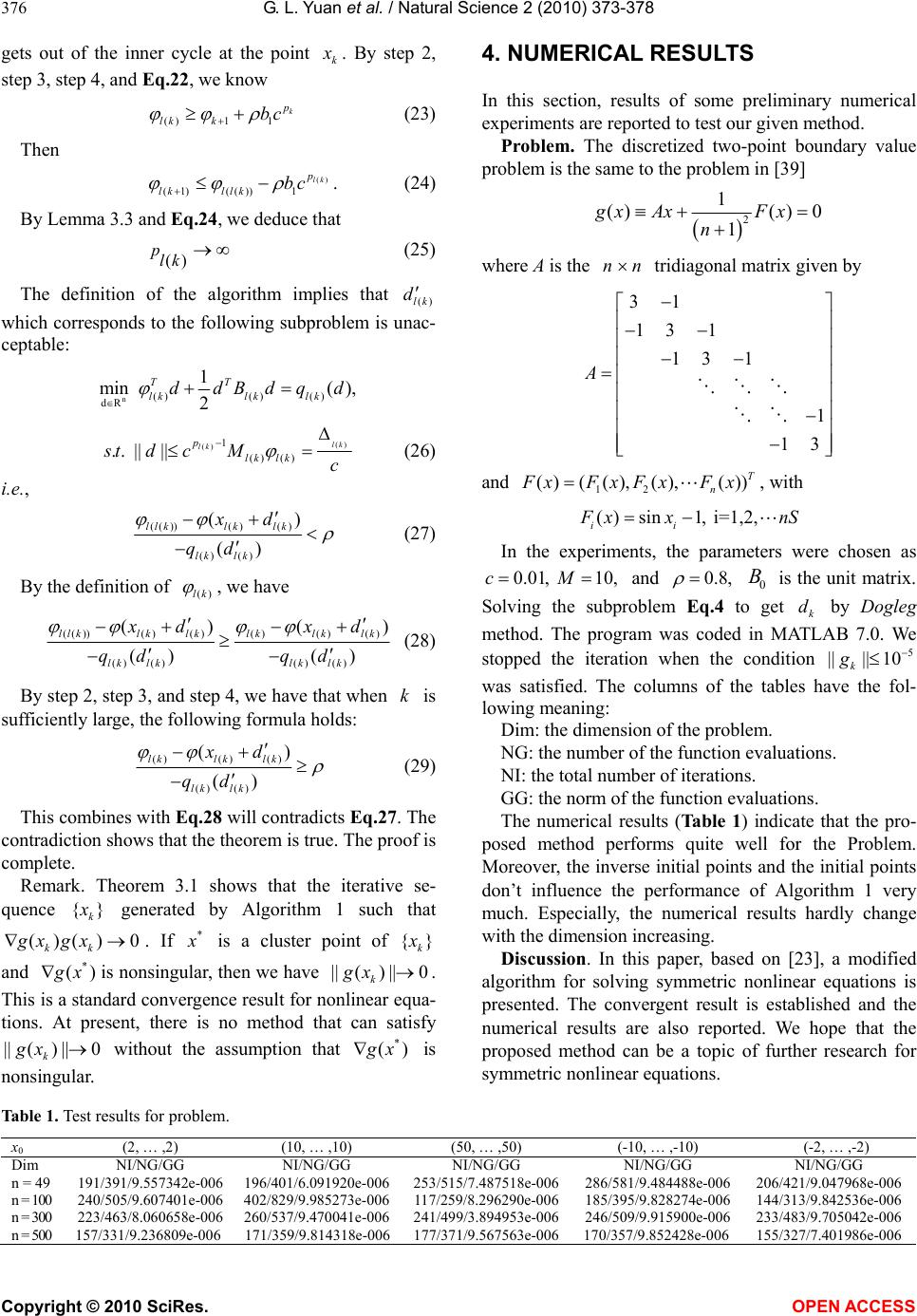 G. L. Yuan et al. / Natural Science 2 (2010) 373-378 Copyright © 2010 SciRes. OPEN ACCESS 376 gets out of the inner cycle at the point k x . By step 2, step 3, step 4, and Eq.22, we know ()1 1 k p lk kbc (23) Then () (1) (())1 lk p lkllk bc . (24) By Lemma 3.3 and Eq.24, we deduce that () plk (25) The definition of the algorithm implies that ()lk d which corresponds to the following subproblem is unac- ceptable: n()() () dR 1 min (), 2 TT lklklk ddBdqd () () 1 () () .. ||||lk lk p lk lk st dcMc (26) i.e., (())() () () () () () llklk lk lk lk xd qd (27) By the definition of ()lk , we have (())() ()()() () () ()() () () () () () llklklk lklklk lk lklk lk xd xd qd qd (28) By step 2, step 3, and step 4, we have that when k is sufficiently large, the following formula holds: ()()() () () () () lklk lk lk lk xd qd (29) This combines with Eq.28 will contradicts Eq.27. The contradiction shows that the theorem is true. The proof is complete. Remark. Theorem 3.1 shows that the iterative se- quence {} k x generated by Algorithm 1 such that ()() 0 kk gx gx. If * x is a cluster point of {} k x and * () g xis nonsingular, then we have ||() ||0 k gx . This is a standard convergence result for nonlinear equa- tions. At present, there is no method that can satisfy ||() ||0 k gx without the assumption that * () g x is nonsingular. 4. NUMERICAL RESULTS In this section, results of some preliminary numerical experiments are reported to test our given method. Problem. The discretized two-point boundary value problem is the same to the problem in [39] 2 1 ()() 0 1 gx AxFx n where A is the nn tridiagonal matrix given by 31 13 1 131 1 13 A and 12 ()( (),(),()) T n F xFxFxFx, with ()sin1, i=1,2, ii F xx nS In the experiments, the parameters were chosen as 0.01,c 10,M and 0.8, 0 B is the unit matrix. Solving the subproblem Eq.4 to get k d by Dogleg method. The program was coded in MATLAB 7.0. We stopped the iteration when the condition 5 |||| 10 k g was satisfied. The columns of the tables have the fol- lowing meaning: Dim: the dimension of the problem. NG: the number of the function evaluations. NI: the total number of iterations. GG: the norm of the function evaluations. The numerical results (Table 1) indicate that the pro- posed method performs quite well for the Problem. Moreover, the inverse initial points and the initial points don’t influence the performance of Algorithm 1 very much. Especially, the numerical results hardly change with the dimension increasing. Discussion. In this paper, based on [23], a modified algorithm for solving symmetric nonlinear equations is presented. The convergent result is established and the numerical results are also reported. We hope that the proposed method can be a topic of further research for symmetric nonlinear equations. Table 1. Test results for problem. x0 (2, … ,2) (10, … ,10) (50, … ,50) (-10, … ,-10) (-2, … ,-2) Dim NI/NG/GG NI/NG/GG NI/NG/GG NI/NG/GG NI/NG/GG n = 49 191/391/9.557342e-006 196/401/6.091920e-006253/515/7.487518e-006 286/581/9.484488e-006 206/421/9.047968e-006 n = 100 240/505/9.607401e-006 402/829/9.985273e-006117/259/8.296290e-006185/395/9.828274e-006 144/313/9.842536e-006 n = 300 223/463/8.060658e-006 260/537/9.470041e-006241/499/3.894953e-006246/509/9.915900e-006 233/483/9.705042e-006 n = 500 157/331/9.236809e-006 171/359/9.814318e-006177/371/9.567563e-006170/357/9.852428e-006 155/327/7.401986e-006  G. L. Yuan et al. / Natural Science 2 (2010) 373-378 Copyright © 2010 SciRes. OPEN ACCESS 377 REFERENCES [1] Yuan, G.L. and Lu, X.W. (2009) A modified PRP conju- gate gradient method. Annals of Operations Research, 166(1), 73-90. [2] Yuan, G.L. and Lu, X.W. (2008) A new line search method with trust region for unconstrained optimization. Communications on Applied Nonlinear Analysis, 15(1), 35-49. [3] Yuan, G.L. and Wei, Z.X. (2009) New line search meth- ods for unconstrained optimization. Journal of the Ko- rean Statistical Society, 38(1), 29-39. [4] Yuan, G.L. and Wei, Z.X. (2008) Convergence analysis of a modified BFGS method on convex minimizations. Computational Optimization and Applications. [5] Yuan, G.L. and Wei, Z.X. (2008) The superlinear con- vergence analysis of a nonmonotone BFGS algorithm on convex objective functions. Acta Mathematica Sinica, English Series, 24(1), 35-42. [6] Yuan, G.L. and Lu, X.W. and Wei, Z.X. (2007) New two-point stepsize gradient methods for solving uncon- strained optimization problems. Natural Science Journal of Xiangtan University, 29(1), 13-15. [7] Yuan, G.L. and Wei, Z.X. (2004) A new BFGS trust re- gion method. Guangxi Science, 11 , 195-196. [8] Moré, J.J. and Sorensen, D.C. (1983) Computing a trust- region step. SIAM Journal on Scientific and Statistical Computing, 4(3), 553-572. [9] Flecher, R. (1987) Practical methods of optimization. 2nd Edition, John and Sons, Chichester. [10] Gay, D.M. (1981) Computing optimal locally constrained steps. SIAM Journal on Scientific and Statistical Com- puting, 2, 186-197. [11] Powell, M.J.D. (1975) Convergence properties of a class of minimization algorithms. Mangasarian, O.L., Meyer, R.R. and Robinson, S.M., Ed., Nonlinear Programming, Academic Press, New York, 2, 1-27. [12] Schultz, G.A., Schnabel, R.B. and Bryrd, R.H. (1985) A family of trust-region-based algorithms for unconstrained minimization with strong global convergence properties. SIAM Journal on Numerical Analysis, 22(1), 47-67. [13] Byrd, R.H., Schnabel, R.B. and Schultz G.A. (1987) A trust-region algorithm for nonlinearly constrained opti- mization. SIAM Journal on Numerical Analysis, 24(5), 1152-1170. [14] Celis, M.R., Dennis, J.E. and Tapia, R.A. (1985) A trust-region strategy for nonlinear equality constrained optimization, in numerical optimization 1984. Boggs, P.R. Byrd, R.H. and Schnabel, R.B., Ed., SIAM, Philadelphia, 71-82. [15] Liu, X. and Yuan, Y. (1997) A global convergent, locally superlinearly convergent algorithm for equality con- strained optimization. Research Report, ICM-97-84, Chinese Academy of Sciences, Beijing. [16] Vardi, A. (1985) A trust-region algorithm for equality constrained minimization: Convergence properties and implementation. SIAM Journal of Numerical Analysis, 22(3), 575-579. [17] Nocedal, J. and Yuan, Y. (1998) Combining trust region and line search techniques. Advances in Nonlinear Pro- gramming, 153-175. [18] Sterhaug, T. (1983) The conjugate gradient method and trust regions in large-scale optimization. SIAM Journal Numerical Analysis, 20(3), 626-637. [19] Yuan, Y. (2000) A review of trust region algorithms for optimization. Proceedings of the 4th International Con- gress on Industrial & Applied Mathematics (ICIAM 99), Edinburgh, 271-282. [20] Yuan, Y. (2000) On the truncated conjugate gradient method. Mathematical Programming, 87(3), 561-573. [21] Zhang, X.S., Zhang, J.L. and Liao, L.Z. (2002) An adap- tive trust region method and its convergence. Science in China, 45, 620-631. [22] Yuan, G.L., Meng, S.D. and Wei, Z.X. (2009) A trust- region-based BFGS method with line search technique for symmetric nonlinear equations. Advances in Opera- tions Research, 2009, 1-20. [23] Zhang, J.L. and Zhang, X.S. (2003) A nonmonotone adaptive trust region method and its convergence. Com- puters and Mathematics with Applications, 45(10-11), 1469-1477. [24] Schnabel, R.B. and Eskow, R. (1990) A new modified cholesky factorization. SIAM Journal on Scientific and Statistical Computing, 11(6), 1136-1158. [25] Griewank, A. (1986) The ‘global’ convergence of Broy- den-like methods with a suitable line search. Journal of the Australian Mathematical Society Series B, 28, 75-92. [26] Zhu, D.T. (2005) Nonmonotone backtracking inexact quasi-Newton algorithms for solving smooth nonlinear equations. Applied Mathematics and Computation, 161(3), 875-895. [27] Fan, J.Y. (2003) A modified Levenberg-Marquardt algo- rithm for singular system of nonlinear equations. Journal of Computational Mathematics, 21, 625-636. [28] Yuan, Y. (1998) Trust region algorithm for nonlinear equations. Information, 1, 7-21. [29] Yuan, G.L., Wei, Z.X. and Lu, X.W. (2009) A non- monotone trust region method for solving symmetric nonlinear equations. Chinese Quarterly Journal of Mathe- matics, 24, 574-584. [30] Yuan, G.L. and Lu, X.W. and Wei, Z.X. (2007) A modi- fied trust region method with global convergence for symmetric nonlinear equations. Mathematica Numerica Sinica, 11(3), 225-234. [31] Li, D. and Fukushima, M. (1999) A global and superlin- ear convergent Gauss-Newton-based BFGS method for symmetric nonlinear equations. SIAM Journal on Nu- merical Analysis, 37(1), 152-172. [32] Wei, Z.X., Yuan, G.L. and Lian, Z.G. (2004) An ap- proximate Gauss-Newton-based BFGS method for solv- ing symmetric nonlinear equations. Guangxi Sciences, 11(2), 91-99. [33] Yuan, G.L. and Li, X.R. (2004) An approximate Gauss- Newton-based BFGS method with descent directions for solving symmetric nonlinear equations. OR Transactions, 8(4), 10-26. [34] Yuan, G.L. and Li, X.R. (2010) A rank-one fitting method for solving symmetric nonlinear equations. Journal of Applied Functional Analysis, 5(4), 389-407. [35] Yuan, G.L. and Lu, X.W. and Wei, Z.X. (2009) BFGS trust-region method for symmetric nonlinear equations.  G. L. Yuan et al. / Natural Science 2 (2010) 373-378 Copyright © 2010 SciRes. OPEN ACCESS 378 Journal of Computational and Applied Mathematics, 230(1), 44-58. [36] Yuan, G.L., Wei, Z.X. and Lu, X.W. (2006) A modified Gauss-Newton-based BFGS method for symmetric non- linear equations. Guangxi Science, 13(4), 288-292. [37] Yuan, G.L., Wang, Z.X. and Wei, Z.X. (2009) A rank-one fitting method with descent direction for solving sym- metric nonlinear equations. International Journal of Communications, Network and System Sciences, 2(6), 555-561. [38] Yuan, G.L. and Lu, X.W. (2008) A new backtracking inexact BFGS method for symmetric nonlinear equations. Computer and Mathematics with Application, 55(1), 116- 129. [39] Ortega, J.M. and Rheinboldt, W.C. (1970) Iterative solu- tion of nonlinear equations in several variables. Aca- demic Press, New York. |