R. ADARSHA ET AL.
Copyright © 2012 SciRes. JTTs
66
Figure 4. The task evaluation model.
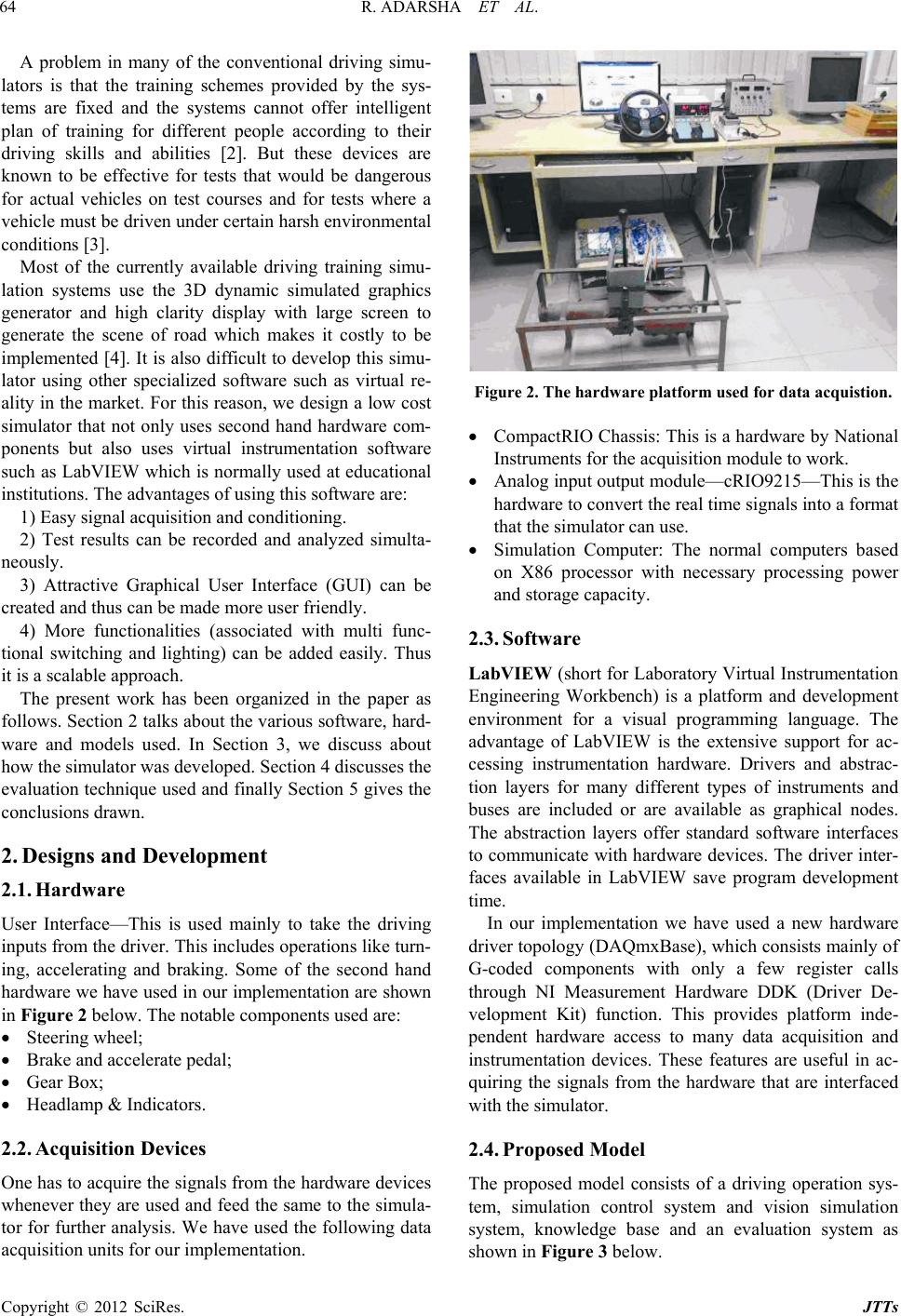
Figure 5. GUI design used in one of the training modules.
based on the various inputs like steering position, gear
position, brake pedal pressure, accelerator pedal pressure,
etc. The brake and accelerator pressure are evaluated
together by calculating the speed using the Equation (1).
Along with th ese, the sequen ce of operations is also eva-
luated here. For example, to take a turn one has to reduce
the speed by braking, shifting gears and then steering to
turn.
4) Visual Interface: This part enables the driver to see
the road condition s as if there is a cockpit in a car. Video
data base has been used. Depending on various circum-
stances the driver has to act within certain time limit as
decided by the timi ng pa rt .
5) Timing part: For each task, the learner has to do the
tasks depending on the road conditions shown to him. A
standard reaction time is set for evaluating the reaction
time of the driver.
4. Evaluation Techniques and Trainer
Also, multiple tasks with parallel data acquisition is de-
signed to test the driver concentration on each of the ve-
hicle controls. This is done by evaluating the tasks and in
parallel running another while loop for data acquisition.
n Ambassador car gear box is taken and an array of
infrared sensor system is deployed to check the gear po-
sition for the evalua tion of the correct gear position for a
given speed [5]. In the proposed trainer system, speed is
taken as the reference signal while th e steering angle and
the gear position data are used for evaluation purpose.
5. Conclusion
There are many commercially available DTAS in the
market. But most of them are very expensive. An attempt
is made to design a low-cost driver trainer assistance
system. The hardware peripherals used are second hand
(used) ones. The software made is to run on a general
purpose common PC to reduce the cost further. One can
add more modules (both hardware and software) and
scale the same if new driving rules emerge. It can be
customized according to people and region. A user gets a
real time feeling and also can learn as much as he wants
without spending on fuel costs. The logged information
is useful for evaluating the drivers. The proposed system
complements the conventional driving.
6. Acknowledgements
This work forms part of the Research and Development
activities of TIFAC-CORE in Automotive Infotronics,
VIT University, and Vellore, India. The authors would
like to thank the Centre for providing necessary hardware
and software support. Adarsh Roy and Arun Kumar
would like to acknowledge Miss. Shalini, Development
Engineer and Mr. Saravanan, Development Engineer for
the help rendered.
REFERENCES
[1] A. Kumar, S. Lalwani, D. Agrawal and R. Rautji, “Fatal
Road Traffic Accidents and Their Relationship with Head
Injuries: An Epidemiological Survey of Five Years,” In-
dian Journal of Neurotrauma, Vol. 5, No. 2, 2008, pp.
63-67.
[2] A. Auckland, J. Manning, et al., “Advanced Driver As-
sistance Systems: Objective and Subjective Performance
Evaluation,” Vehicle System Dynamics, Vol. 46, Supple-
ment 1, 2008, pp. 883-897.
doi:10.1080/00423110802037131
[3] J. Q. Wang, S. B. Li, X. Y. Huang and K. Q. Li, “A Driv-
ing Simulation Platform Applied to Develop Driver As-
sistance Systems,” IEEE Vehicle Power and Propulsion
Conference, Dearborn, 7-10 September 2009, pp. 878-883.
doi:10.1109/VPPC.2009.528975 5
[4] J. Fan and L. R. Xiong, et al., “Intelligent Driving Train-
ing Simulation System Based on Virtual Reality,” Pro-
ceedings of IEEE Intelligent Transportation Systems, Vol.
1, 2003, pp. 27-30.
[5] K. Ganesan and P. S. Babu, “Sensor Based Gear Position
Identification System,” The Journal of the Instrument So-
ciety of India, Vol. 41, No. 3, 2011, pp. 158-160.
A