Paper Menu >>
Journal Menu >>
 J. Mod. Phys., 2010, 1, 33-43 doi:10.4236/jmp.2010.11004 Published Online April 2010 (http://www.scirp.org/journal/jmp) Copyright © 2010 SciRes. JMP Studying Magnetization Distribution in Magnetic Thin Films under Transversal Application of Magnetic Fields Aleksey Anatolievich Zakharenko International Institute of Zakharenko Waves, Krasnoyarsk, Russia E-mail: aazaaz@inbox.ru Received January 25, 2010; revised February 26, 2010; accepted March 20, 2010 Abstract The problem of magnetization change across the direction of magnetic field for a magnetic layer with non-symmetric boundary conditions was treated. The exact solution of the problem for the magnetization components mx and my was written in the form of complex combination of Jacobian elliptic functions and elliptic integrals. This allows one to demonstrate both the static mode and all dynamic modes for the mag- netization distribution across the layer thickness. The static mode and several dynamic modes, as well as the first and second derivatives of the magnetization components, were calculated. Also, average values of the magnetization components mx and my for the static mode and three dynamic modes were calculated in dependence on the magnetic field. The obtained results can represent an interest in the large amount of ap- plications of magnetic devices such as recording media, memory chips, and computer disks. The results are also useful for checking different numerical methods recently applied to study the problem, because it is thought that any numerical method cannot demonstrate solutions for the dynamic modes. Keywords: Landau-Lifshits Equations, Thin Films, Magnetization, Static and Dynamic Modes. 1. Introduction The Landau-Lifshits equations first derived by Landau and Lifshits on a phenomenological ground in [1,2] are fundamental equations in the theory of ferromagnetism. The study of the equations can demonstrate the magneti- zation distribution inside a ferromagnetic material and is a very challenging problem in physics and mathematics. Indeed, the study of them can be useful for a set of ap- plications of magnetic devices [3,4] such as recording media and computer sensors, disks, and memory chips. The numerical and theoretical studies of the equations can be found in many works carried out in the last sev- eral decades (for example see [3-10]). However, it is thought that any numerical treatment can not demon- strate existence of a set of additional solutions. These solutions can improve understanding of magnetization distributions in a ferromagnetic layer when different re- gimes of application of magnetic fields can be realized for a domain in the layer. It is assumed that in a ferromagnetic layer on an anti-ferromagnetic substrate, the vector of magnetic momentum M can be clamped at the boundary between the layer and the substrate. In this two-layer system, some magnetic structures [11,12] can appear when an external magnetic field is applied in the layer plane. These magnetic structures are characterized by inhomo- geneous turn of the M across the layer thickness. In 1980, Zakharov and Khlebopros [13] reported that solutions written in [12] for the magnetization distribution in a magnetically-soft layer on a magnetically-hard substrate under axial application of a magnetic field can be written in a novel way. Also, some solutions of the problem were originally found by Aharoni [11] in 1959, using the Jacobian elliptic functions [14,15]. Also, the excellent and classical book [16] by Collatz provides solutions of eigenvalue problems with different boundary conditions. In 1995, the further theoretical investigations by Zak- harov [17] considered the magnetic reversal of a mag- netic system in a layer across anisotropy. Studying one of the magnetization components of the first dynamic mode, it was shown that magnetization in the layer after the dynamic threshold can turn from the equilibrium po- sition and becomes opposite to the field over the entire thickness of the layer. It was also assumed in [17] that this occurs in a similar manner as a rod loaded by a transverse force is bent oppositely to the force direction as soon as the first dynamic threshold is achieved. Note that an infinite number of all higher-order modes fol- lowed the single static mode can be called the dynamic modes. In 1949, this definition of dynamic loss of stabil- ity was first given by Lavrent’ev and Ishlinskii [18]  A. A. ZAKHARENKO Copyright © 2010 SciRes. JMP 34 when they studied a shock loading applied to rods. In- deed, the problem of magnetization change along the direction of magnetic anisotropy of a magnetic layer with non-symmetric boundary conditions is similar to the Euler problem of stability of an elastic rod. Note that exact solutions for the problem of transversal loading of the rods were recently given in the work [19]. It is thought that magnetic systems are more convenient for studying the dynamic buckling because of many experi- ments on these systems which can be performed. It is also thought that these magnetic layered struc- tures can represent an interest in the development of idea of creation of the metallic transistor [20-22] be- cause an applied magnetic field can easily create an inhomogeneous distribution of the magnetization. In- deed, it is possible to study some effects resulting from the problem. Also, it is thought that the theoretical studies can be important for grasping some processes when liquid crystals and seignette-electrics are switched by super-strong fields. Some interesting experimental data can be found in the review paper [23] for the novel evaluation of the problem. This theoretical study of the magnetization distribution provides exact solutions leading to existence possibility of infinite number of dynamic modes in addition to the single static mode. In the studied case, the magnetic field is transversely applied. The following section describes the theory. The third section investigates the magnetiza- tion components concerning extreme and inflexion points. In addition, the fourth section provides the mag- netization distribution in the case when the magnetic anisotropy is accounted. 2. Theory The magnetic layered system is shown in Figure 1 when a ferromagnetic layer with the thickness d is situated on an anti-ferromagnetic substrate. The z-axis is directed parallel to the normal to both the layer surface and the interface between the layers; z = 0 at the interface. The x-axis and y-axis lie in the plane of the interface. It is H Magnetically-soft layer Magnetically-hard layer M Z Y X Figure 1. The configuration of a magnetically-soft layer on a magnetically-hard layer. possible to treat domains with equal width and with neg- ligibly thin walls such that the walls’ energy can be omitted. The applied magnetic field H is directed along the y-axis, and the initial direction of the magnetization vector M is towards the x-axis negative values as shown in the figure. The applied H can turn the magnetization vector M. The Landau-Lifshitz Equation (1) can be written in the following form [13]: )(e jj jgHMM (1) where × is the vector cross product, g is the exchange coupling constant (gyromagnetic ratio); j = 1, 2. In Equa- tion (1), the term on the left represents the first derivative of Mj with respect to time. The boundary conditions for Equation (1) are chosen as follows: Mix = –M, Miy = Miz = 0 at z = 0 and ∂Mi/∂n = 0 at z = d (2) when the n is directed along the surface normal. In Equa- tion (1), the effective magnetic fields Hi (e) can be written in the following form for this case: i dm i e i E M HMH 2 2)( (3) where α is the constant of exchange for a ferromagnetics, H represents external constant and altering magnetic fields. The energy Edm related to demagnetization fields existing at the domain boundaries can be written in the form of [13]: 2 21 2 21 4 8 1 xxxzzdm MMMME 2 21 2 21 zzzyyy MMMM (4) where the demagnetization factors ηj are as follows: ηx = 0, ηy = 4πd/(d + D), ηz = 4πD/(d + D) [13] with d and D representing the layer thickness and domain width, re- spectively. It is possible to use normalized field h = H/M and normalized magnetization m*i = Mi/M. The m*i de- pend on the coordinate z and time t, and can be written as corresponding static and dynamic terms: m*i(z, t) = mi(z) + μi(z, t). The dynamic μi(z, t) were treated in [13] and do not represent a studying subject of this work. Note that in the treated case, the static magnetization components of mi(z) satisfy the following relationships: xxx mmm 21 ,yyy mmm 21 , 0 21 zz mm , 1 22 yx mm (5) After several complicated mathematical transforma- tions described in [13] and accounting Equations (2)-(5), Equation (1) can be represented as: 0)( 2 2 2 2 yxyy x y y xmmhm z m m z m m (6)  A. A. ZAKHARENKO Copyright © 2010 SciRes. JMP 35 with boundary conditions mx = –1 at z = 0 and ∂mx/∂z = 0 at z = d (7) In Equation (6), the material parameter β represents the constant of single-axis anisotropy; h = H/M. Using the coupling between the magnetization components mx = cos(χ) and my = sin(χ), the Equation (6) can be rewrit- ten in the following form: 0)cos1(sin 2 2 b h dz d (8) with the boundary conditions for the angle χ in the case of transversal loading of a magnetic field (see Figure 1) χ = π/2 at z = 0 and ∂χ/∂z = 0 at z = d (9) That leads to the equation of oscillations of the mathe- matical pendulum in the simplified case of b = (ηy + β)/h = 0 (ηy → 0 and β → 0): 0sin 2 2 2 q df d (10) In Equation (10), the f represents the normalized layer thickness, f = z/d, and q2 = d2h/α. It is now necessary to separate variables such as χ and f. Setting intermediate variable T = dχ/df, it is possible to get the following equation TdT/df = –q2sin(χ)[1 + bcos(χ)] resulting in T2 = 2q2cos(χ)[1 + 0.5bcos(χ)] + const, and hence dχ/df = sqrt{const + 2q2cos(χ)[1 + 0.5bcos(χ)]}. Using the well-known trigonometric formula cos(χ) = 1 – 2sin2(χ/2), it is possible to write an intermediate result: 222* 1sin)cos1(1 2d d bkC f (11) with C1 2 = (2 + b)q2 +const, ψ = χ/2 and the parameter k*2 ≡ 1/k2. The complicated case of Equation (11) is dis- cussed below. In the simplified case of b = 0, the con- stant C1 2 → C2 = 4q2k2 = 2q2 + const and 22* sin1 d d k fkq (12) In order to obtain the function ψ(f), the right side of equality (12) can be written in the form of the elliptic integral of the first kind: ** ),( CkFkqf (13) where C* is a constant which should be determined from the boundary conditions. The elliptic integral of the first kind can be calculated with the descending Landen transformation [15]. Applying the boundary condition (9) at z = 0 (f = 0) and using the transformation formulas F(ψ, k*) = kF(ψ*, k) and sin(ψ) = ksin(ψ*) for k*2 = 1/k2 [14,15], the constant C* can be found as a function of k: C* = kFk(k) with )),2/2(arcsin()( kkFkFk (14) Equation (13) can then be written as )(, sin arcsin kFqfk k Fk (15) and applying the function such as sine to both sides of Equation (15), one can get ),(snsin kuk (16) where u = qf + Fk(k) and sn(u, k) is the elliptic sine rep- resenting one of the twelve Jacobian elliptic functions [15]. The function sn(u, k) can be also calculated with the descending Landen transformation [15]. Note that F(φ, k) = u and φ = am(u) from [14,15]. Hence )],(snarcsin[2 kuk (17) Applying the boundary condition (9) at z = d (f = 1) the parameter q can be also obtained as a function of k from the following equality: ),(cn2 d dkukq f (18) It is apparent that dχ/df = 0 if the elliptic cosine cn(u, k) = 0 that is satisfied for u = ρK(k) with ρ = 2τ – 1 and τ = 1, 2, 3, … , where K(k) = F(π/2, k) is called the complete elliptic integral of the first kind. Therefore 2 22 )()(/kFkKhdq k (19) and )()()( kFfkFkKukk (20) Note that the parameter k2 should be confined in the following range: 12/12k (21) The exact solutions for the magnetization components mx and my can be written as functions of the Jacobian elliptic functions sn(u, k) and dn(u, k) in the following complicated form: ),(sn),(dn2 kukukm x (22) ),(sn21 22 kukmy (23) where dn(u, k) is called the elliptic delta-amplitude. Using the effective magnetic field Ha of anisotropy [13] defined as 2 2dha , Equation (19) can be written as 22 )()(2kFkKhh k a (24) The average values, mx and my, of the magnetiza- tion components (22) and (23) can then be written in the following form: 0 cn( ,)cn((),) 1()d 2() () d k xx k ukF kk mmzzk dKkFk (25) 0 1 ()d (am, )(arcsin(2/2), ) 2() () d yy k mmzzf d EukE kk KkF k (26)  A. A. ZAKHARENKO Copyright © 2010 SciRes. JMP 36 where E(amu, k) represents the elliptic integral of the second kind. The exact solutions (25) and (26) were first introduced in [19] describing the dynamic instability in the nonlin- ear problem of a cantilever. Figure 2 shows the depend- ence of the values of mx and my on the normalized values of h/ha for the static mode and several dynamic modes. The exact values of h/ha calculated with formula (24) are listed in Table 1. It is thought that these tabu- lated values of h/ha can be useful for researchers to check accuracy of different numerical methods. The behaviors of the magnetization components mx and my as functions of the f = z/d are shown in Figure 3 (static mode) and Figures 4, 5, 6, and 7 (several corre- sponding dynamic modes) for several values of the pa- -rameter k2. It is clearly seen in all the figures that the satisfaction of the boundary condition of mx(f = 0) = –1 occurs. It is also seen in Figures 5 and 6 that the mini- mum values of the component my = –1 are significantly closer to each other for the different values of k2 and the larger values of the f. This can mean that the magnetiza- tion vector M can be aligned along the y-axis just below the layer surface for the large values of ρ and f → 1, and any values of k2 in the range: ½ ≤ k2 ≤ 1. Note that Fig- ure 7 shows the limit case of k2 = 1 for the fourth dynamic mode with ρ = 9. It is noted for comparison that in [17] homogeneous magnetization distributions were shown in the case of the axial loading of magnetic field. The following section theoretically investigates the magnetization components mx and my written in Formulas 050100 – 1 – 0.5 0 0.5 h/h a ρ = 3 ρ = 5 ρ = 5 ρ = 7 ρ = 7 ρ = 1 <m x > an d <m y > ρ = 1 ρ = 3 Figure 2. The dependence of the average magnetization components mx and myon the values of h/ha for the static mode (ρ = 1) and three dynamic modes (ρ = 3, 5, 7). Table 1. The values of h/ha with a high accuracy calculated with formula (24) for the static mode (ρ = 1) and four dynamic modes (ρ = 3, 5, 7, 9). h/ha k2 τ = 1, ρ = 1 τ = 2, ρ = 3 τ = 3, ρ = 5 τ = 4, ρ = 7 τ = 5, ρ = 9 0.5 0.0 5.57281572 22.29126287 50.15534147 89.16505150 0.6 0.16567298 8.34803259 28.85368867 61.68264124 106.83489028 0.7 0.35546612 10.48881628 34.58708571 72.65027440 124.67838235 0.8 0.61298524 13.37289437 42.65213110 88.45069543 150.76858736 0.85 0.80045211 15.49579728 48.69611846 100.40141566 170.61168887 0.9 1.08028952 18.67880751 57.82731652 118.52581656 200.77430761 0.99 3.19667416 42.16367438 125.41284831 252.94419597 424.75771734 0.999 6.35289569 75.41909073 220.47314024 441.51504424 738.54480272 0.9999 10.58349145 118.41697367 342.64545246 683.26892783 1140.28739976 0.99999 15.88920579 171.10175649 491.73272506 977.78211149 1629.24991578  A. A. ZAKHARENKO Copyright © 2010 SciRes. JMP 37 z /d 0.85 0.6 0.99 1 – 10 –5 0.99 0.85 0.6 0.5 1 – 10 –5 m y m x 00.5 1 0 1 -1 0.5 Figure 3. The magnetization distribution for the configura- tion of a magnetically-soft layer on a magnetically-hard layer versus the value of z/d; the static mode with ρ = 1. Several values of the parameter k2 are shown: k2 = 0.5, 0.6, 0.85, 0.99, 1 – 10–5. (22) and (23) concerning study of their derivatives with respect to f = z/d. 3. Derivatives of the Magnetization Components The first derivatives of the magnetization components mx and my with respect to f = z/d read: f u u m f mxx d d d d d d (27) f u u m f myy d d d d d d (28) where )()(dd kFkKfu k (29) Note that the derivative du/df in Equation (29) is equal to a constant for each ρ and k. In Equations (27) and (28), the first derivatives of the mx and my with respect to the function u can be written as follows: 1),(dn2),(cn)2( d ),(ddn ),(sn d ),(dsn ),(dn2 d d 2 kukuk u ku ku u ku kuk u mx 、 (30) ),(dn),(cn),(sn4 d ),(dsn ),(sn4 d d22 kukukuk u ku kuk u my (31) where ),(dn),(cn d ),(dsn kuku u ku (32) ),(sn),(cn d ),(ddn 2kukuk u ku (33) Using Equations (27) and (28), the second derivatives of the mx and my with respect to the f can be written as follows: 2 22 2 222 dddd ddd d dd ddd ddd xxxx mmmm uuu ff uuf ffu (34) z /d 0 0.5 1 0 1 – 1 m x 0.5 1 – 10 –5 0.85 0.99 0.6 1 – 10 –5 0.85 0.99 0.6 z /d 00.51 0 1 – 1 0.5 1 – 10 –5 0.85 0.99 0.6 m y 0.5 0.85 0.99 0.6 Figure 4. The magnetization components mx and my versus the value of z/d; the first dynamic mode with ρ = 3. The val- ues of parameter k2 are the same to those for the static mode shown in Figure 3.  A. A. ZAKHARENKO Copyright © 2010 SciRes. JMP 38 z / d 00.51 -1 0 1 0.5 1 – 10 –5 0.85 0.99 0.6 m x 1 – 10 –5 0.85 0.99 0.6 1 – 10 –5 0.99 0.6 0.85 0.5 z /d 00.51 – 1 0 1 0.5 1 – 10 –5 0.85 0.99 0.6 m y 1–10 –5 0.85 0.99 0.6 0.5 Figure 5. The magnetization components mx and my versus the value of z/d; the second dynamic mode with ρ = 5. The values of parameter k2 are the same to those for the static mode shown in Figure 3. 00.5 1 z /d -1 0 1 0.5 1 – 10–5 0.85 0.99 0.5 mx 1 – 10–5 0.85 0.99 0.6 00.5 1 z /d – 1 0 1 0.5 1 – 10 –5 0.85 0.99999 0.6 m y 0.99 Figure 6. The magnetization components mx and my versus the value of z/d; the third dynamic mode with ρ = 7. The val- ues of parameter k2 are the same to those for the static mode shown in Figure 3. 2 2 2 2 2 2 2 d d d d d d d d d d d d d d d d f u u m f u u m u m ff u f myyyy (35) It is stressed that the second derivative of the function u with respect to f in Equations (34) and (35) equals zero due to the linear dependence u(f) because K(k) and Fk(k) are constants. In Equations (34) and (35), the second derivatives of the mx and my with respect to the function u can be written in the following form: u ku kuk u mx s d ),(snd ),(dn2 d d 2 2 2 2 u ku u ku u ku ku d ),(ddn d ),(dsn 2 d ),(dnd ),(sn 2 2 (36) 2 2 2 2 2 2 d ),(snd ),(sn d ),(dsn 4 d d u ku ku u ku k u my (37) where 2 222 2 dsn( ,)sn(, )dn(, )cn(, ) d uk ukuk kuk u (38) 2 222 2 ddn( ,)dn(,)cn(,)sn(, ) d uk kuk ukuk u (39)  A. A. ZAKHARENKO Copyright © 2010 SciRes. JMP 39 00.51 z / d -1 0 1 m x and m y Figure 7. The magnetization components mx (solid line) and my (doted line) versus the value of z/d; the fourth dynamic mode with ρ = 9. The value of parameter k2 equals to 1. In the same manner, it is possible here to write all de- rivatives of the mx and my with respect to the f: dd d d dd n nn xx nn mm u f fu (40) dd d d dd n nn yy nn mm u f fu (41) where the index n is an integer and n > 0. The first and second derivatives of the mx and my are shown in Figure 8 for the static mode with ρ = 1. It is clearly seen in Figure 8 that the first derivatives of the mx commence with zero values at f = 0 and they together with the first derivatives of the my become equal to zero at f = 1. The second derivatives of the mx and my for the static mode shown in Figure 8 were calculated with for- mulae (36)-(39). For the first dynamic mode, the first and second derivatives of the mx and my are shown in Figures 9 and 10, respectively, as the functions of the values of z/d. It is seen in Figure 9 that the first derivatives of the mx commence with zero at f = 0 and the derivatives of the mx and my become equal to zero at f = 1 that is similar to the case of the static mode. 4. Non-Zero Value of the Parameter B and Discussions In the case of non-zero parameter b, the magnetization components mx and my were recently written as functions of the Jacobian elliptic functions sn(u, k) and dn(u, k) in the following complicated form [13]: )),(sn1/(),(sn),(dn2 2222 kukukukmx (42) )),(sn1/(),(dn21 222 kukum y (43) According to [13], the parameter ζ represents a func- tion of both parameters k and b, which are independent of each other. The parameter ζ can have any value from 0 to 1, and the parameter b can be written as the following function of the k and ζ [13]: b(k, ζ) = ζ2/( k0 2 – 2k0 2ζ2 + ζ2) with k0 2 = (k2 – ζ2)/(1 – ζ2). First derivatives of m x and m y 00.51 0 .5 1 1.5 0 z /d 0.5 1 – 10 –5 0.85 0.99 0.6 0.85 0.99 0.6 00.51 – 2 – 1 0 1 2 z /d Second derivatives of m x and m y Figure 8. The first and second derivatives of mx (solid line) and my (doted line) with respect to the u versus the value of z/d; the static mode with ρ = 1. The values of parameter k2 are the same to those for the static mode shown in Figure 3. The fac- tors du/df = ρK(k) – Fk(k) for the first derivatives of mx and my are as follows: 0, 0.64, 1.41, 2.81, 6.26 for k2 = 0.5, 0.6, 0.85, 0.99, 1 – 10–5, respectively. The factors (du/df)2 for the second derivatives of mx and my are as follows: 0, 0.41, 1.98, 7.89, 39.2 for the corresponding k2. 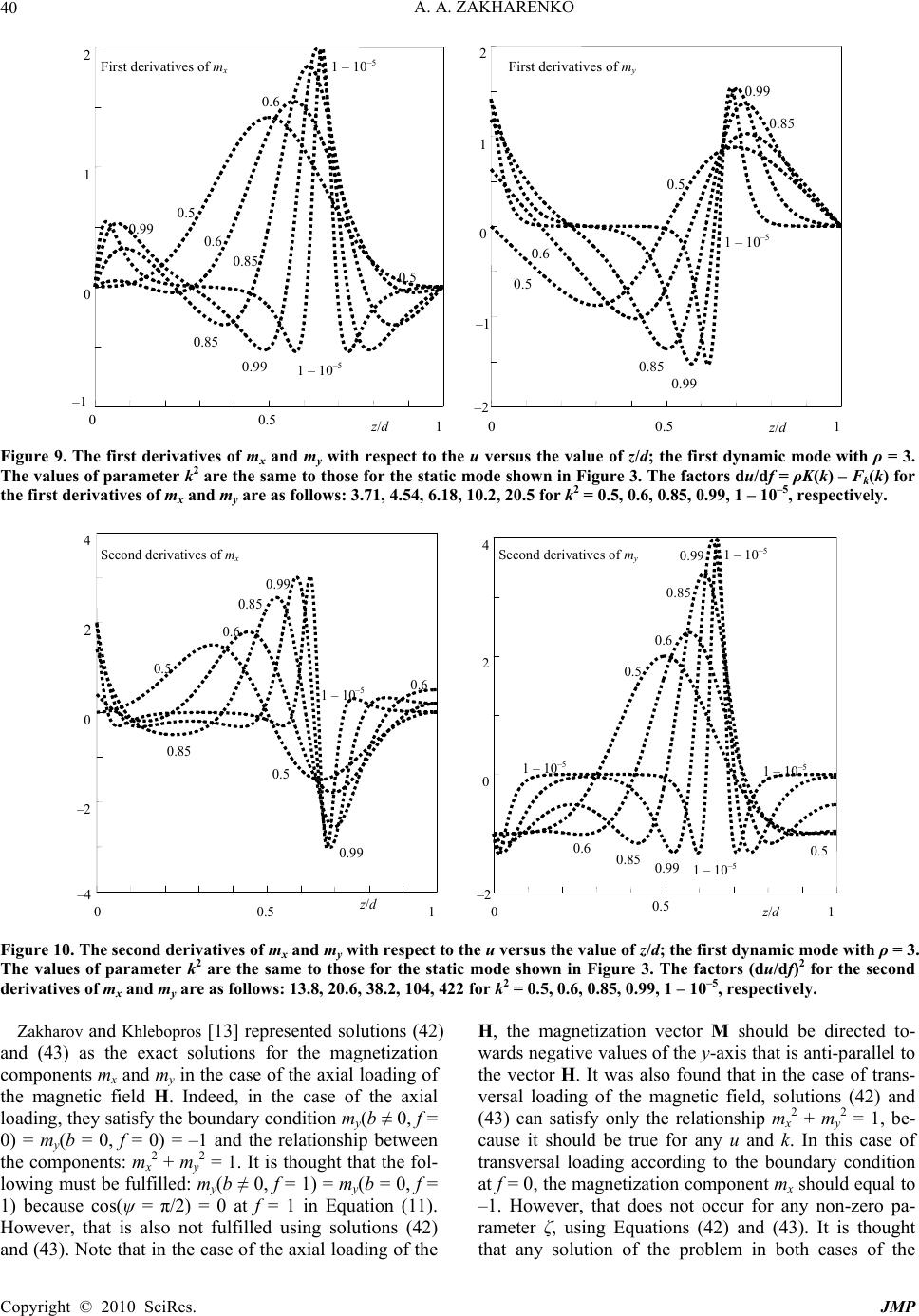 A. A. ZAKHARENKO Copyright © 2010 SciRes. JMP 40 0 0.5 1 – 1 z /d 0 1 2First derivatives of m x 0.5 1 – 10 –5 0.85 0.99 0.6 0.85 0.99 0.6 0.5 1 – 10 –5 00.51 – 2 – 1 z /d 0 1 2 0.5 1 – 10 –5 0.85 0.99 0.85 0.99 0.6 0.5 First derivatives of m y Figure 9. The first derivatives of mx and my with respect to the u versus the value of z/d; the first dynamic mode with ρ = 3. The values of parameter k2 are the same to those for the static mode shown in Figure 3. The factors du/df = ρK(k) – Fk(k) for the first derivatives of mx and my are as follows: 3.71, 4.54, 6.18, 10.2, 20.5 for k2 = 0.5, 0.6, 0.85, 0.99, 1 – 10–5, respectively. 0 0.5 1 – 4 z/d – 2 0 2 4 0.5 1 – 10 –5 0.85 0.99 0.6 0.85 0.99 0.6 0.5 Second derivatives of m x 00.5 1 – 2 z/d 0 2 4Second derivatives of m y 0.5 1 – 10 –5 0.85 0.99 0.6 0.85 0.99 0.6 0.5 1 – 10 –5 1 – 10 –5 1 – 10 –5 Figure 10. The second derivatives of mx and my with respect to the u versus the value of z/d; the first dynamic mode with ρ = 3. The values of parameter k2 are the same to those for the static mode shown in Figure 3. The factors (du/df)2 for the second derivatives of mx and my are as follows: 13.8, 20.6, 38.2, 104, 422 for k2 = 0.5, 0.6, 0.85, 0.99, 1 – 10–5, respectively. Zakharov and Khlebopros [13] represented solutions (42) and (43) as the exact solutions for the magnetization components mx and my in the case of the axial loading of the magnetic field H. Indeed, in the case of the axial loading, they satisfy the boundary condition my(b ≠ 0, f = 0) = my(b = 0, f = 0) = –1 and the relationship between the components: mx 2 + my 2 = 1. It is thought that the fol- lowing must be fulfilled: my(b ≠ 0, f = 1) = my(b = 0, f = 1) because cos(ψ = π/2) = 0 at f = 1 in Equation (11). However, that is also not fulfilled using solutions (42) and (43). Note that in the case of the axial loading of the H, the magnetization vector M should be directed to- wards negative values of the y-axis that is anti-parallel to the vector H. It was also found that in the case of trans- versal loading of the magnetic field, solutions (42) and (43) can satisfy only the relationship mx 2 + my 2 = 1, be- cause it should be true for any u and k. In this case of transversal loading according to the boundary condition at f = 0, the magnetization component mx should equal to –1. However, that does not occur for any non-zero pa- rameter ζ, using Equations (42) and (43). It is thought that any solution of the problem in both cases of the 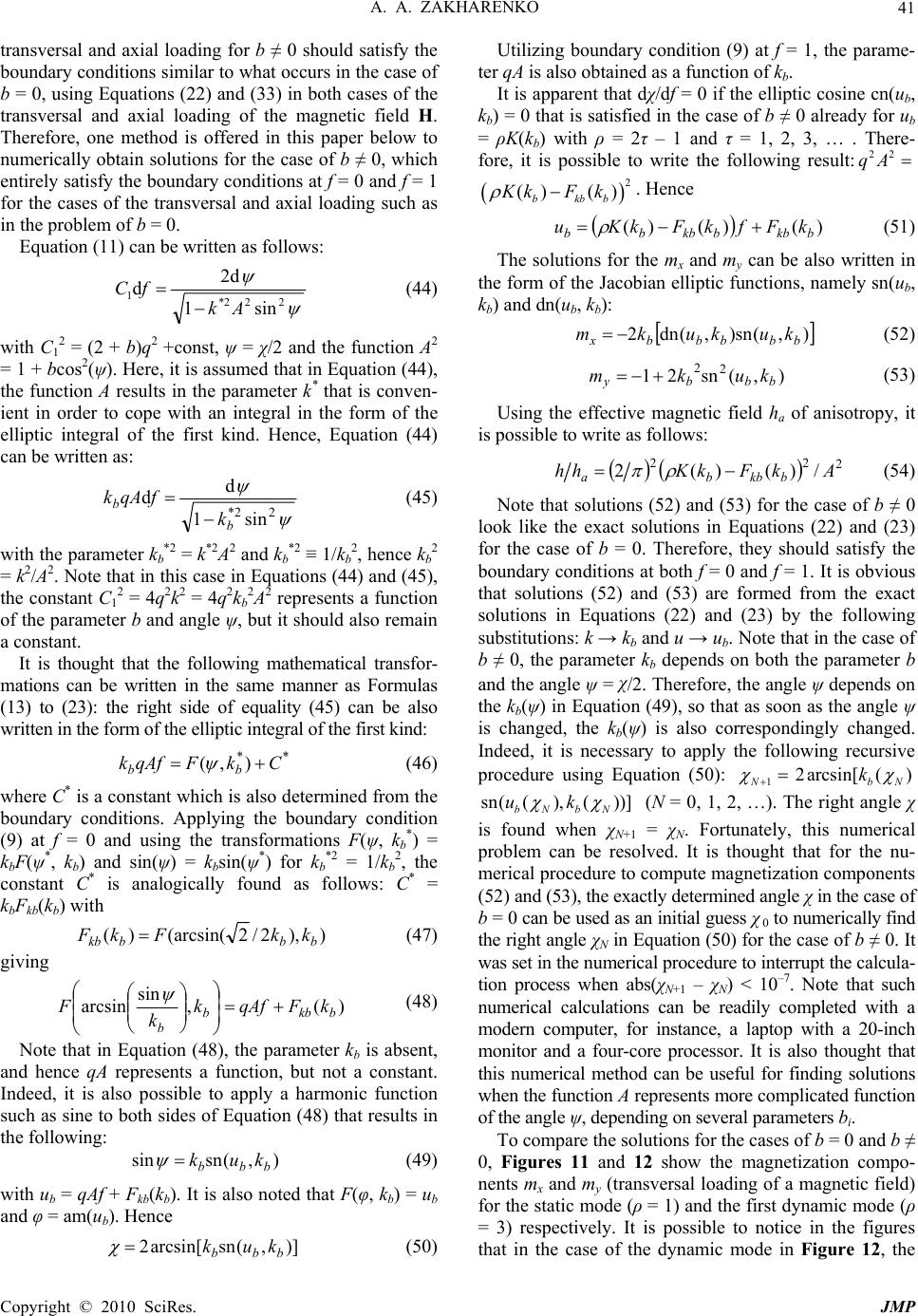 A. A. ZAKHARENKO Copyright © 2010 SciRes. JMP 41 transversal and axial loading for b ≠ 0 should satisfy the boundary conditions similar to what occurs in the case of b = 0, using Equations (22) and (33) in both cases of the transversal and axial loading of the magnetic field H. Therefore, one method is offered in this paper below to numerically obtain solutions for the case of b ≠ 0, which entirely satisfy the boundary conditions at f = 0 and f = 1 for the cases of the transversal and axial loading such as in the problem of b = 0. Equation (11) can be written as follows: 222* 1sin1 2d d Ak fC (44) with C1 2 = (2 + b)q2 +const, ψ = χ/2 and the function A2 = 1 + bcos2(ψ). Here, it is assumed that in Equation (44), the function A results in the parameter k* that is conven- ient in order to cope with an integral in the form of the elliptic integral of the first kind. Hence, Equation (44) can be written as: 22* sin1 d d b b k fqAk (45) with the parameter kb *2 = k*2A2 and kb *2 ≡ 1/kb 2, hence kb 2 = k2/A2. Note that in this case in Equations (44) and (45), the constant C1 2 = 4q2k2 = 4q2kb 2A2 represents a function of the parameter b and angle ψ, but it should also remain a constant. It is thought that the following mathematical transfor- mations can be written in the same manner as Formulas (13) to (23): the right side of equality (45) can be also written in the form of the elliptic integral of the first kind: ** ),( CkFqAfk bb (46) where C* is a constant which is also determined from the boundary conditions. Applying the boundary condition (9) at f = 0 and using the transformations F(ψ, kb *) = kbF(ψ*, kb) and sin(ψ) = kbsin(ψ*) for kb *2 = 1/kb 2, the constant C* is analogically found as follows: C* = kbFkb(kb) with )),2/2(arcsin()( bbbkb kkFkF (47) giving )(, sin arcsin bkbb b kFqAfk k F (48) Note that in Equation (48), the parameter kb is absent, and hence qA represents a function, but not a constant. Indeed, it is also possible to apply a harmonic function such as sine to both sides of Equation (48) that results in the following: ),(snsin bbb kuk (49) with ub = qAf + Fkb(kb). It is also noted that F(φ, kb) = ub and φ = am(ub). Hence )],(snarcsin[2 bbb kuk (50) Utilizing boundary condition (9) at f = 1, the parame- ter qA is also obtained as a function of kb. It is apparent that dχ/df = 0 if the elliptic cosine cn(ub, kb) = 0 that is satisfied in the case of b ≠ 0 already for ub = ρK(kb) with ρ = 2τ – 1 and τ = 1, 2, 3, … . There- fore, it is possible to write the following result:22 qA 2 () () bkbb KkF k . Hence )()()( bkbbkbbb kFfkFkKu (51) The solutions for the mx and my can be also written in the form of the Jacobian elliptic functions, namely sn(ub, kb) and dn(ub, kb): ),(sn),(dn2 bbbbbxkukukm (52) ),(sn21 2 2 bbby kukm (53) Using the effective magnetic field ha of anisotropy, it is possible to write as follows: 2 22 /)()(2 AkFkKhh bkbba (54) Note that solutions (52) and (53) for the case of b ≠ 0 look like the exact solutions in Equations (22) and (23) for the case of b = 0. Therefore, they should satisfy the boundary conditions at both f = 0 and f = 1. It is obvious that solutions (52) and (53) are formed from the exact solutions in Equations (22) and (23) by the following substitutions: k → kb and u → ub. Note that in the case of b ≠ 0, the parameter kb depends on both the parameter b and the angle ψ = χ/2. Therefore, the angle ψ depends on the kb(ψ) in Equation (49), so that as soon as the angle ψ is changed, the kb(ψ) is also correspondingly changed. Indeed, it is necessary to apply the following recursive procedure using Equation (50): 1N 2arcsin[ () bN k sn(( ),( ))] bN bN uk (N = 0, 1, 2, …). The right angle χ is found when χN+1 = χN. Fortunately, this numerical problem can be resolved. It is thought that for the nu- merical procedure to compute magnetization components (52) and (53), the exactly determined angle χ in the case of b = 0 can be used as an initial guess χ 0 to numerically find the right angle χN in Equation (50) for the case of b ≠ 0. It was set in the numerical procedure to interrupt the calcula- tion process when abs(χN+1 – χN) < 10–7. Note that such numerical calculations can be readily completed with a modern computer, for instance, a laptop with a 20-inch monitor and a four-core processor. It is also thought that this numerical method can be useful for finding solutions when the function A represents more complicated function of the angle ψ, depending on several parameters bi. To compare the solutions for the cases of b = 0 and b ≠ 0, Figures 11 and 12 show the magnetization compo- nents mx and my (transversal loading of a magnetic field) for the static mode (ρ = 1) and the first dynamic mode (ρ = 3) respectively. It is possible to notice in the figures that in the case of the dynamic mode in Figure 12, the 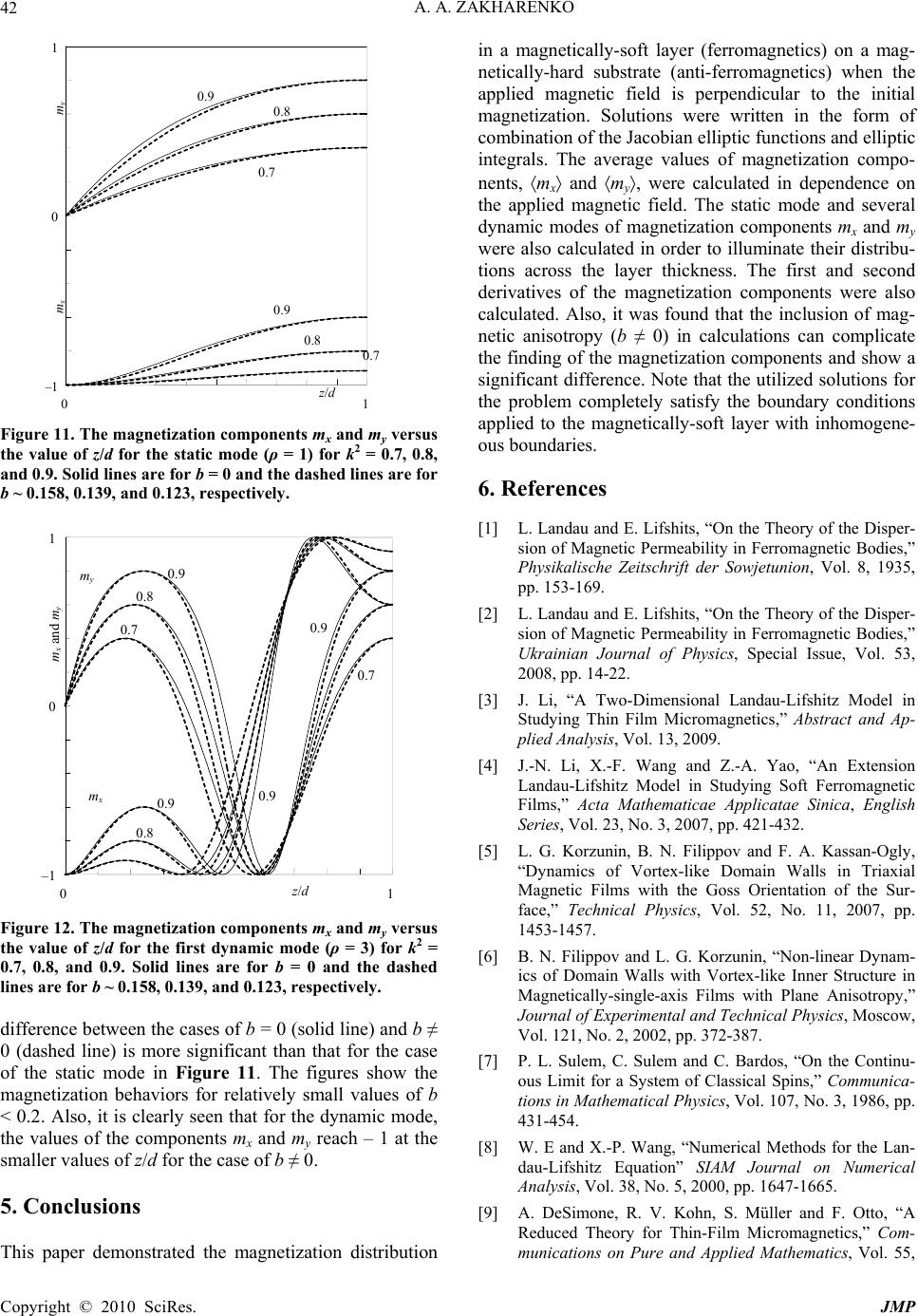 A. A. ZAKHARENKO Copyright © 2010 SciRes. JMP 42 z /d m x m y 0.8 0.7 0.9 0.9 0.8 0.7 01 – 1 0 1 Figure 11. The magnetization components mx and my versus the value of z/d for the static mode (ρ = 1) for k2 = 0.7, 0.8, and 0.9. Solid lines are for b = 0 and the dashed lines are for b ~ 0.158, 0.139, and 0.123, respectively. 0 1 – 1 0 1 0.7 m x and m y 0.8 0.7 0.9 0.8 0.9 0.9 0.9 m x m y z / d Figure 12. The magnetization components mx and my versus the value of z/d for the first dynamic mode (ρ = 3) for k2 = 0.7, 0.8, and 0.9. Solid lines are for b = 0 and the dashed lines are for b ~ 0.158, 0.139, and 0.123, respectively. difference between the cases of b = 0 (solid line) and b ≠ 0 (dashed line) is more significant than that for the case of the static mode in Figure 11. The figures show the magnetization behaviors for relatively small values of b < 0.2. Also, it is clearly seen that for the dynamic mode, the values of the components mx and my reach – 1 at the smaller values of z/d for the case of b ≠ 0. 5. Conclusions This paper demonstrated the magnetization distribution in a magnetically-soft layer (ferromagnetics) on a mag- netically-hard substrate (anti-ferromagnetics) when the applied magnetic field is perpendicular to the initial magnetization. Solutions were written in the form of combination of the Jacobian elliptic functions and elliptic integrals. The average values of magnetization compo- nents, mx and my, were calculated in dependence on the applied magnetic field. The static mode and several dynamic modes of magnetization components mx and my were also calculated in order to illuminate their distribu- tions across the layer thickness. The first and second derivatives of the magnetization components were also calculated. Also, it was found that the inclusion of mag- netic anisotropy (b ≠ 0) in calculations can complicate the finding of the magnetization components and show a significant difference. Note that the utilized solutions for the problem completely satisfy the boundary conditions applied to the magnetically-soft layer with inhomogene- ous boundaries. 6. References [1] L. Landau and E. Lifshits, “On the Theory of the Disper- sion of Magnetic Permeability in Ferromagnetic Bodies,” Physikalische Zeitschrift der Sowjetunion, Vol. 8, 1935, pp. 153-169. [2] L. Landau and E. Lifshits, “On the Theory of the Disper- sion of Magnetic Permeability in Ferromagnetic Bodies,” Ukrainian Journal of Physics, Special Issue, Vol. 53, 2008, pp. 14-22. [3] J. Li, “A Two-Dimensional Landau-Lifshitz Model in Studying Thin Film Micromagnetics,” Abstract and Ap- plied Analysis, Vol. 13, 2009. [4] J.-N. Li, X.-F. Wang and Z.-A. Yao, “An Extension Landau-Lifshitz Model in Studying Soft Ferromagnetic Films,” Acta Mathematicae Applicatae Sinica, English Series, Vol. 23, No. 3, 2007, pp. 421-432. [5] L. G. Korzunin, B. N. Filippov and F. A. Kassan-Ogly, “Dynamics of Vortex-like Domain Walls in Triaxial Magnetic Films with the Goss Orientation of the Sur- face,” Technical Physics, Vol. 52, No. 11, 2007, pp. 1453-1457. [6] B. N. Filippov and L. G. Korzunin, “Non-linear Dynam- ics of Domain Walls with Vortex-like Inner Structure in Magnetically-single-axis Films with Plane Anisotropy,” Journal of Experimental and Technical Physics, Moscow, Vol. 121, No. 2, 2002, pp. 372-387. [7] P. L. Sulem, C. Sulem and C. Bardos, “On the Continu- ous Limit for a System of Classical Spins,” Communica- tions in Mathematical Physics, Vol. 107, No. 3, 1986, pp. 431-454. [8] W. E and X.-P. Wang, “Numerical Methods for the Lan- dau-Lifshitz Equation” SIAM Journal on Numerical Analysis, Vol. 38, No. 5, 2000, pp. 1647-1665. [9] A. DeSimone, R. V. Kohn, S. Müller and F. Otto, “A Reduced Theory for Thin-Film Micromagnetics,” Com- munications on Pure and Applied Mathematics, Vol. 55,  A. A. ZAKHARENKO Copyright © 2010 SciRes. JMP 43 No. 11, 2002, pp. 1408-1460. [10] A. DeSimone, R. V. Kohn, S. Müller, F. Otto and R. Schäfer, “Two-Dimensional Modelling of Soft Ferro- magnetic Films,” Proceedings of the Royal Society of London, Series A, Vol. 457, No. 2016, 2001, pp. 2983- 2991. [11] A. Aharoni, E. H. Frei and S. Shtrikman, “Theoretical Approach to the Asymmetrical Magnetization Curve,” Journal of Applied Physics, Vol. 30, No. 12, 1959, pp. 1956-1961. [12] N. M. Salansky and M. S. Eruchimov, “The Peculiarities of Spin-Wave Resonance in Films with Ferro-Antiferro- magnetic Interaction,” Thin Solid Films, Vol. 6, No. 2, 1970, pp. 129-140. [13] Y. V. Zakharov and E. A. Khlebopros, “Magnetization Curves and Frequencies of Magnetic Resonance in Films with Domain Structures on Anti-Ferromagnetic Substrate,” Solid State Physics, Moscow, Vol. 22, No. 12, 1980, pp. 3651-3657. [14] H. Bateman and A. Erd´elyi, “Higher Transcendental Functions,” McGraw-Hill, New York, Vol. 3, 1955. [15] M. Abramowitz and I. A. Stegun, Eds., “Handbook of Mathematical Functions with Formulas,” Graphs and Mathematical Tables, National Bureau of Standards in Applied Mathematics, Washington, 1964, p. 1058. [16] L. Collatz, “Eigenvalue Problems with Engineering Ap- plications,” Fizmatgiz, Moscow, 1968. [17] Y. V. Zakharov, “Static and Dynamic Instability of a Ferromagnetic Layer under Magnetic Reversal,” Doklady of Russian Academy of Science, Vol. 344, No. 3, 1995, pp. 328-332. [18] M. A. Lavrent’ev and A. Y. Ishlinskii, “Dynamic Buck- ling Modes of Elastic Systems,” Doklady Akademii Nauk USSR (Moscow), Vol. 64, No. 6, 1949, pp. 779-782. [19] Y. V. Zakharov and A. A. Zakharenko, “Dynamic Insta- bility in the Nonlinear Problem of a Cantilever,” Compu- tational Technologies, Vol. 4, No. 1, 1999, pp. 48-54. [20] M. Johnson, “Bipolar Spin Switch,” Science, Vol. 260 No. 5106, 1993, pp. 320-323. [21] D. J. Monsma, J. C. Lodder, T. J. A. Popma and B. Dieny, “Perpendicular Hot Electron Spin-Valve Effect in a New Magnetic Field Sensor: The Spin-Valve Transistor,” Phy- sical Review Letters, Vol. 74, No. 26, 1995, pp. 5260- 5263. [22] M. Johnson, “Spin Injector in Metal Films: The Bipolar Spin Transistor,” Materials Science and Engineering B, Vol. 31, 1995, pp. 199-205. [23] V. Y. Shur and E. L. Rumyantsev, “Kinetics of Ferro- electric Domain Structure during Switching: Theory and Experiment,” Ferroelectrics, Vol. 151, 1994, pp. 171-189. |