Qualititative Analysis of Interface Behavior under First Phase Transition
28
(4) has real or complex characteristic numbers. Let us give
a brief description of the regimes presented.
In the equilibrium state g = 0, α > 0 (k = k0). Equation
(4) gives stable solutions. In the equilibrium regime any
perturbation involves finite movement of the interface. The
system asymptotically approaches the equilibrium state
at large values of t. Two regimes with gradTS ≠ 0 and a
motionless interface represent the initial state of the sys-
tem. These regimes are introduced to emphasize that even
with a motionless interface the system is in the nonequi-
librium state. If in the equilibrium state the coordinate
point (a, g) is on the a axis, then at VS = 0 the coordinate
point can be anywhere within the interval (a > 0, g > 0).
Depending on the sign of det, the point of the parameter
values can be either a stable node or a stable focus. Re-
gimes 1 and 2 exhibit a qualitatively identical temperature
and concentration distribution. The nonsimple point is sta-
ble. The sign of det determines whether it will be a node
or a focus. It should be noted that with changing velocity
the nonsimple point can have either node-focus or focus-
node bifurcation. Phase portrait on Figure 1 shows regions
with different types of nonsimple points. The figures in
the circles indicate the range of system parameter values
corresponding to the row number in Table 1. Regimes 3
and 4 are different from 1 and 2 only by the sign of the
concentration gradient. This corresponds to solution insta-
bility in the kinetic overcooling region .The change of the
concentration sign gradient leads to the fact that g > 0 at
any stationary interface velocity. Regime 5 is the bifurca-
tion of the nonsimple point of Regimes 1 and 2 when g be-
comes negative. This sign reversal indicates transition to
the concentration overcooling region. It should be empha-
sized that this regime requires a well-developed concen-
tration profile and, hence, a fairly high interface velocity.
Regimes 6 - 9 are different from 1 - 5 regimes by the sign
of parameter a. These regimes can be implemented pro-
vided the interface velocity of the stationary regime is suf-
ficiently large for the distribution ratio to exceed unity due
to interface component adsorption. Regimes 1 and 2 can
change to Regime 6 which is actually transition of stable
solution from a regime with a > 0 to that with a < 0 at an
Figure 1. Phase portrait of nonequilibrium system.
interface velocity sufficient for interface component ad-
sorption. By transition between stable regimes with dif-
ferent values of stationary interface velocity we mean a slow
change of stationary interface velocity without failure of
the flat interface surface. As the stable regime changes to an
instable one, the interface in experiments can remain flat
only to the stability boundary. Further interface dynamics is
determined by the domain of attraction of some steady-state
regime of the system. Transient and steady-state regimes
cannot be considered in this qualitative analysis. As it
follows from the analysis, depending on parameter gradCS
and a with increasing velocity of the stationary regime,
stable solutions 1 and 2 can formally change into one of
the two instable solutions: Regime 5 related to transition
of the stable regime to the concentration over-cooling re-
gime or Regime 6 related to transition of the distribution
ratio to the region with eff
> 1 owing to interface com-
ponent adsorption. Regimes 3 and 4 can change to re-
gime 7 since they all have instable solution in front of the
interface. Regimes 3 and 4 can also change to Regime 8
and 9 provided the sign of parameter α is changed, i.e.
due to adsorption, the effective distribution ration be-
comes greater than unity and changes the sign of g and the
system gets over to the concentration overcooling region.
Now let us consider quasiequilibrium problem setting.
In the equation obtained the kinetic coefficient 1/Λ stands
for a dissipative term. The smaller 1/Λ, the larger Λ and,
hence, the higher the interface velocity at the same kine-
tic overcooling. In the limit Λ = ∞ (h = 0) at any infinite-
simal kinetic overcooling the interface immediately shifts
to the equilibrium phase transition surface. In this case ki-
netic overcooling tends to zero whereas the equilibrium
temperature tends to equilibrium phase transition tempe-
rature, i.e. the regime corresponds to quasiequilibrium set-
ting of the directed crystallization problem. Within the li-
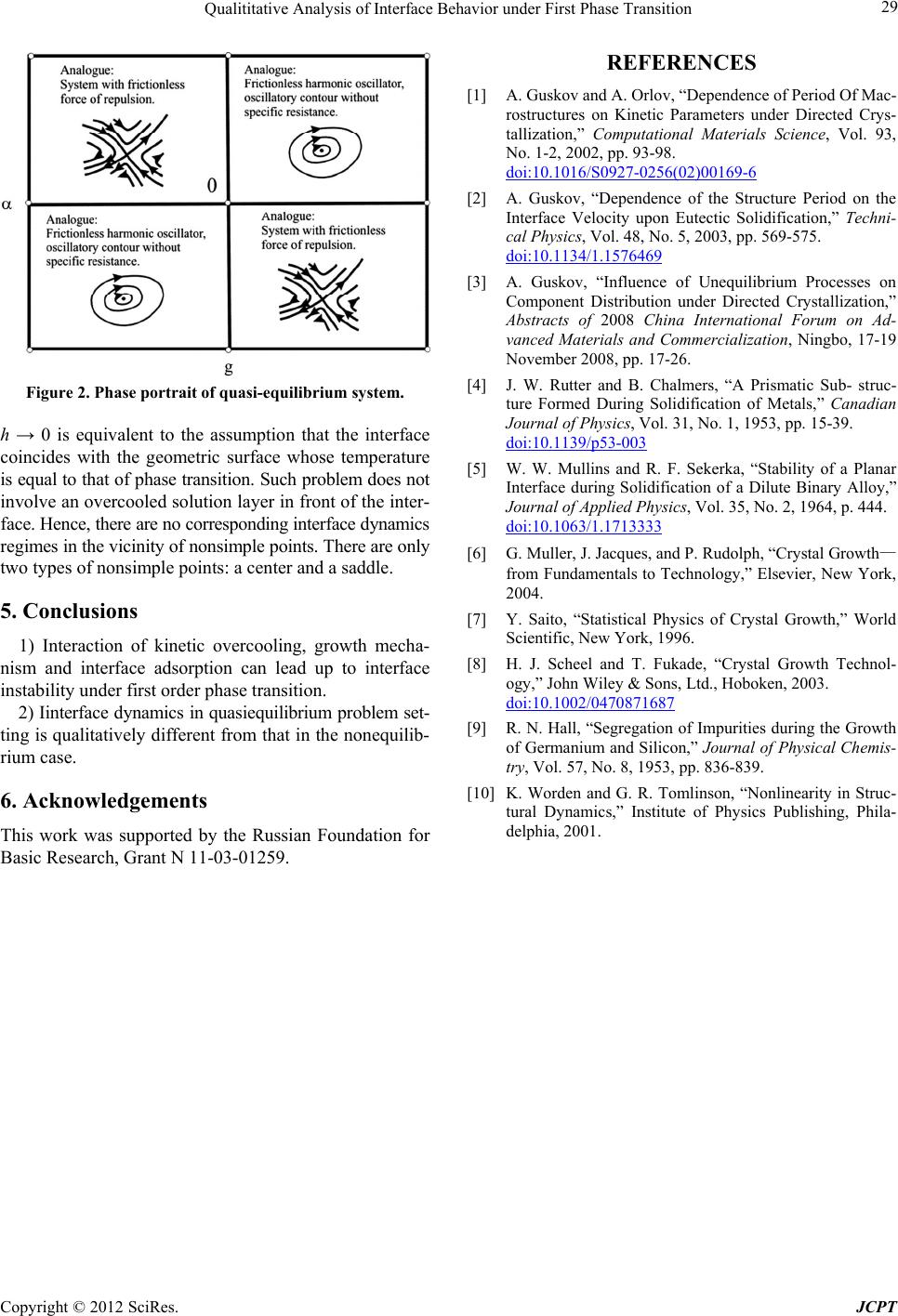
mit Λ = ∞ Equation (4) transforms to a harmonic oscilla-
tor equation which yields two variants of solution, namely,
solutions with imaginary characteristic numbers α > 0, g
> 0 or, which is formally the same, α < 0, g < 0. Here the
nonsimple point is the center, And solutions with real
characteristic equal sign numbers α > 0, g < 0 or, which
is formally the same, α < 0, g > 0, the nonsimple point
being a saddle. Figure 2 shows a phase portrait of non-
simple points for Equation (4) at h = 0. In the general case
the phase portrait of the system should be considered in
the three- dimensional system (α, g, h). If the coefficient
h of the oscillation equation is taken as a control pa-
rameter, the value of h = 0 is presented as a special case
of fixed physical parameters of the system and the phase
portrait of nonsimple points shown in Figure 2 belongs
to the case of a noncoarse dynamic system. The value h =
0 corresponds to the zero value of kinetic overcooling.
Strictly speaking, in this case the interface velocity is equal
to zero which does not imply equilibrium. The condition
Copyright © 2012 SciRes. JCPT