Applied Mathematics
Vol.06 No.01(2015), Article ID:53342,8 pages
10.4236/am.2015.61017
Necessary Conditions for the Application of Moving Average Process of Order Three
O. E. Okereke1, I. S. Iwueze2, J. Ohakwe3
1Department of Statistics, Michael Okpara University of Agriculture, Umudike, Nigeria
2Department of Statistics, Federal University of Technology, Owerri, Nigeria
3Department of Mathematical, Computer and Physical Sciences, Federal University, Otueke, Nigeria
Email: emmastat5000@yahoo.co.uk
Copyright © 2015 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 26 November 2014; accepted 12 December 2014; published 19 January 2015
ABSTRACT
Invertibility is one of the desirable properties of moving average processes. This study derives consequences of the invertibility condition on the parameters of a moving average process of order three. The study also establishes the intervals for the first three autocorrelation coefficients of the moving average process of order three for the purpose of distinguishing between the process and any other process (linear or nonlinear) with similar autocorrelation structure. For an invertible moving average process of order three, the intervals obtained are ,
,
 and
and .
.
Keywords:
Moving Average Process of Order Three, Characteristic Equation, Invertibility Condition, Autocorrelation Coefficient, Second Derivative Test

1. Introduction
Moving average processes (models) constitute a special class of linear time series models. A moving average process of order
 (
( process) is of the form:
process) is of the form:
 (1.1)
(1.1)
where
 are real constants and
are real constants and ,
,
 is a sequence of independent and identically distributed random variables with zero mean and constant variance. These processes have been widely used to model time series data from many fields [1] -[3] . The model in (1.1) is always stationary. Hence, a required condition for the use of the moving average process is that it is invertible. Let
is a sequence of independent and identically distributed random variables with zero mean and constant variance. These processes have been widely used to model time series data from many fields [1] -[3] . The model in (1.1) is always stationary. Hence, a required condition for the use of the moving average process is that it is invertible. Let , then the model in (1.1) is invertible if the roots of the characteristic equation
, then the model in (1.1) is invertible if the roots of the characteristic equation
 (1.2)
(1.2)
lie outside the unit circle. The invertibility conditions of the first order and second order moving average models have been derived [4] [5] .
Ref. [6] used a moving average process of order three (MA (3) process) in his simulation study. Though, higher order moving average processes have been used to model time series data, not much has been said about the properties of their autocorrelation functions. This study focuses on the invertibility condition of an MA (3) process. Consideration is also given to the properties of its autocorrelation coefficients of an invertible moving average process of order three.
2. Consequence of Invertibility Condition on the Parameters of an MA (3) Process
For , the following moving average process of order 3 is obtained from (1.1):
, the following moving average process of order 3 is obtained from (1.1):
 (2.1)
(2.1)
The characteristic equation corresponding to (2.1) is given by
 (2.2)
(2.2)
Dividing (2.2) by
 yields
yields
 (2.3)
(2.3)
It is important to know that (2.2) is a cubic equation. Detailed information on how to solve cubic equations can be found in [7] [8] among others. It has been a common tradition to consider the nature of the roots of a characteristic equation while determining the invertibility condition of a time series model [9] . As a cubic equation, (2.2) may have three distinct real roots, one real root and two complex roots, two real equal roots or three real equal roots. The nature of the roots of (2.2) is determined with the help of the discriminant [8]
 (2.4)
(2.4)
where
 (2.5)
(2.5)
and
 (2.6)
(2.6)
If , (2.2) has the following distinct roots [7]
, (2.2) has the following distinct roots [7]
 , (2.7)
, (2.7)
 , (2.8)
, (2.8)
and
 . (2.9)
. (2.9)
where
 is measured in radians and
is measured in radians and .
.
When , (2.2) has only real root given by [1] as
, (2.2) has only real root given by [1] as
 (2.10)
(2.10)
The other roots are [8]
 (2.11)
(2.11)
If ,
,
 and
and , then
, then
 and (2.2) has two equal roots. The roots of (2.2) in this case, are the same as (2.7), (2.8) and (2.9). For
and (2.2) has two equal roots. The roots of (2.2) in this case, are the same as (2.7), (2.8) and (2.9). For
 and
and , (2.2) has three real equal roots. Each of these roots is given by [8] as
, (2.2) has three real equal roots. Each of these roots is given by [8] as
 (2.12)
(2.12)
For (2.1) to be invertible, the roots of (2.2) are all expected to lie outside the unit circle and . In the following theorem, the invertibility conditions of an MA (3) process are given subject to the condition that the corresponding characteristic equation has three real equal roots.
. In the following theorem, the invertibility conditions of an MA (3) process are given subject to the condition that the corresponding characteristic equation has three real equal roots.
Theorem 1. If the characteristic equation
 has three real equal roots, then the moving average process of order three
has three real equal roots, then the moving average process of order three
 is invertible if
is invertible if
 ,
, and
and .
.
Proof
For invertibility, we expect each of the three real equal roots to lie outside the unit circle. Thus,
 or
or 
Solving the inequality , we obtain
, we obtain
For , we have
, we have
Since each of the roots lie outside the unit circle, the absolute value of their product must therefore be greater than one. Hence,

This completes the proof.
The invertibility region of a moving average of order three with equal roots of the characteristic Equation (2.2) is enclosed by triangle OAB in Figure 1.
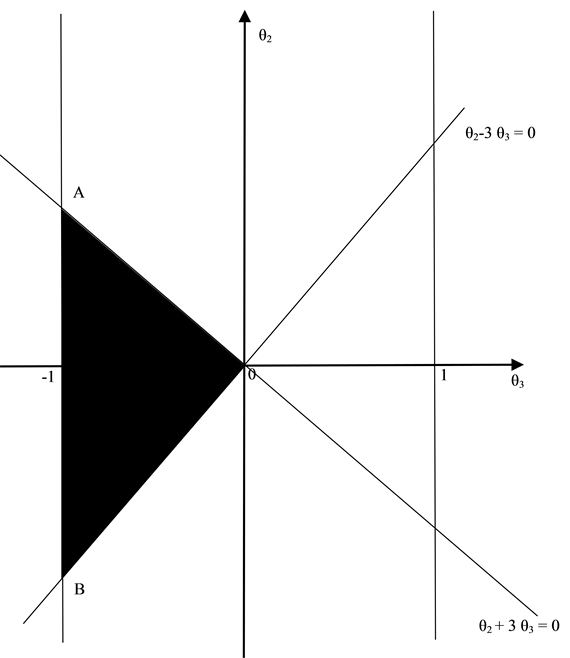
Figure 1. Invertibility region of an MA (3) process when the characteristic equation has three real equal roots.
3. Identification of Moving Average Process
Model identification is a crucial aspect of time series analysis. A common practice is to examine the structures of the autocorrelation function (ACF) and partial autocorrelation function (PACF) of a given time series. In this regard, a time series is said to follow a moving average process of order
 if its associated autocorrelation function cut off after lag
if its associated autocorrelation function cut off after lag
 and the corresponding partial autocorrelation function decays exponentially [10] . Authors using this method, believe that each process has unique ACF representation. However, the existence of similar autocorrelation structures between moving average process and pure diagonal bilinear time series process of the same order makes it difficult to identify a moving average process based on the pattern of its ACF. Furthermore, a careful look at the autocorrelation function of the square of a time series can help one determine if the series follows a moving average process. If the series can be generated by a moving average process, then its square follows a moving average process of the same order [11] [12] . The conditions under which we use the autocorrelation function to distinguish among processes behaving like moving average processes of order one and two have been determined by [13] [14] respectively. These conditions are all defined in terms of the extreme values of autocorrelation coefficients of the processes.
and the corresponding partial autocorrelation function decays exponentially [10] . Authors using this method, believe that each process has unique ACF representation. However, the existence of similar autocorrelation structures between moving average process and pure diagonal bilinear time series process of the same order makes it difficult to identify a moving average process based on the pattern of its ACF. Furthermore, a careful look at the autocorrelation function of the square of a time series can help one determine if the series follows a moving average process. If the series can be generated by a moving average process, then its square follows a moving average process of the same order [11] [12] . The conditions under which we use the autocorrelation function to distinguish among processes behaving like moving average processes of order one and two have been determined by [13] [14] respectively. These conditions are all defined in terms of the extreme values of autocorrelation coefficients of the processes.
4. Intervals for Autocorrelation Coefficients of a Moving Average Process of Order Three
As stated in Section 3, knowledge of the extreme values of the autocorrelation coefficient of a moving average process of a particular order can enable us ensure proper identification of the process. It has been observed that for a moving average process of order one,
 [15] while for a moving average process of order
[15] while for a moving average process of order
two
 and
and
 [5] . In order to generalize about the range of values of
[5] . In order to generalize about the range of values of
 for a
for a
moving average process of order , it is worthwhile to determine the range values of
, it is worthwhile to determine the range values of
 for a moving average process of order three. The model in (2.1) has the following autocorrelation function [10] :
for a moving average process of order three. The model in (2.1) has the following autocorrelation function [10] :
 (4.1)
(4.1)
We can deduce from (4.1) that the autocorrelation function at lag one of the MA (3) process is
 (4.2)
(4.2)
Using the Scientific Note Book, the minimum and maximum values of
 are found to be
are found to be
 and
and
 respectively. For the autocorrelation function at lag two, we have
respectively. For the autocorrelation function at lag two, we have
 (4.3)
(4.3)
The extreme values of
 are equally obtained with the help of the Scientific Note Book. To this effect,
are equally obtained with the help of the Scientific Note Book. To this effect,
 has a minimum value of −0.5 and a maximum value of 0.5.
has a minimum value of −0.5 and a maximum value of 0.5.
From (4.1), we obtain
 (4.4)
(4.4)
Based on the result obtained from the Scientific Notebook,
 has a minimum value of −0.5 and a maximum value of 0.5. However, the intervals for
has a minimum value of −0.5 and a maximum value of 0.5. However, the intervals for
 can easily be obtained analytically and this result is generalized in Theorem 2 for
can easily be obtained analytically and this result is generalized in Theorem 2 for
 of the MA
of the MA
 process.
process.
The partial derivatives of
 with respect to
with respect to ,
,
 and
and
 are
are
 (4.5)
(4.5)
 (4.6)
(4.6)
 (4.7)
(4.7)
The critical points of
 occurs when
occurs when ,
, . Equating each of the partial derivatives in (4.5),
. Equating each of the partial derivatives in (4.5),
(4.6) and (4.7) to zero, we obtain
 (4.8)
(4.8)
 (4.9)
(4.9)
 (4.10)
(4.10)
From (4.10), we have
 (4.11)
(4.11)
Using (4.8), we obtain
 (4.12)
(4.12)
or
 (4.13)
(4.13)
Substituting
 into (4.11) yields
into (4.11) yields
 (4.14)
(4.14)
For , (4.9) becomes
, (4.9) becomes
 (4.15)
(4.15)
If we also substitute
 into (4.9), we obtain
into (4.9), we obtain
 (4.16)
(4.16)
When we substitute
 and
and
 into (4.11), we have
into (4.11), we have . It is also clear that if
. It is also clear that if
 and
and , then
, then . Similar result is obtained when
. Similar result is obtained when
 and
and .
.
Hence, the critical points of
 are
are ,
,
 ,
,
 and
and .
.
The minimum and maximum values of a function occur at it critical points. To determine which of the critical points is a local minimum, local maximum or a saddle point, we shall apply the second derivative test. The second derivative test for critical points of a function of three variables
 focuses on the Hessian matrix:
focuses on the Hessian matrix:
 (4.17)
(4.17)
where
 (4.18)
(4.18)
 (4.19)
(4.19)
 (4.20)
(4.20)
 (4.21)
(4.21)
 (4.22)
(4.22)
 (4.23)
(4.23)
Let
 be a critical point of
be a critical point of . Then
. Then
 is called a local minimum point if at
is called a local minimum point if at
 ,
,
 ,
,
 and
and
 [16] . If
[16] . If ,
,
 and
and
 at
at ,
,
then
 represents a local maximum.
represents a local maximum.
A critical point that is neither a local minimum nor a local maximum is called a saddle point.
Though
 has four critical points, it is not defined at
has four critical points, it is not defined at
 and
and . We then focus on the classification of the two remaining critical points.
. We then focus on the classification of the two remaining critical points.
At

Hence,
 ,
,
 and
and .
.
Therefore,
 is a local minimum. The value of
is a local minimum. The value of
 at this point is
at this point is .
.
For the critical points , we have
, we have
Consequently,
and
We therefore conclude that
 is a local maximum. The maximum value of
is a local maximum. The maximum value of
 obtained at
obtained at
 is 0.5.
is 0.5.
We can deduce from the result in this section and other previous works that for MA (1) process , while for MA (2) process and MA (3) process
, while for MA (2) process and MA (3) process
 and
and
 respectively.
respectively.
In what follows, we establish the bounds for , where
, where
 is order of the moving average process.
is order of the moving average process.
Theorem 2.
Let
 be an MA
be an MA
 process. Then,
process. Then, .
.
Proof
It is easily seen that for the MA
 process,
process,
Partial derivatives of
 with respect to
with respect to
 are as follows
are as follows
Equating each of the partial derivatives to zero yields
 (4.24)
(4.24)
From (4.24), we obtain
 (4.25)
(4.25)
Since
 for an MA
for an MA
 process, it is obvious that the
process, it is obvious that the
 equations preceding (4.24) are only satisfied if
equations preceding (4.24) are only satisfied if . Substituting
. Substituting
 into (4.25) leads to
into (4.25) leads to . The two critical points of
. The two critical points of
 are then
are then
 and
and .
.
At ,
,
 while at
while at ,
, . It then follows that
. It then follows that .
.
Remark: For an invertible MA (3) process, . Hence,
. Hence,
 ,
,
 and
and .
.
5. Conclusion
We have established necessary conditions for the parameters of an invertible MA (3) process. When the characteristic equation has three real equal roots, the conditions are ,
,
 and
and . Also the intervals for the autocorrelation coefficients of an invertible moving average process of order three are estab-
. Also the intervals for the autocorrelation coefficients of an invertible moving average process of order three are estab-
lished. These are ,
,
 and
and . It is also noteworthy that the
. It is also noteworthy that the
condition on
 for an invertible MA (3) process is generalized for
for an invertible MA (3) process is generalized for
 of the invertible MA
of the invertible MA
 process. That is for the invertible MA
process. That is for the invertible MA
 process,
process, . These results can now be used to compare other linear and nonlinear processes that have similar autocorrelation structures with the MA (3) process.
. These results can now be used to compare other linear and nonlinear processes that have similar autocorrelation structures with the MA (3) process.
References
- Moses, R.L. and Liu, D. (1991) Optimal Nonnegative Definite Approximation of Estimated Moving Average Covariance Sequences. IEEE Transactions on Signal Processing, 39, 2007-2015. http://dx.doi.org/10.1109/78.134433
- Qian, G. and Zhao, X. (2007) On Time Series Model Selection Involving Many Candidate ARMA Models. Computational Statistics and Data Analysis, 51, 6180-6196. http://dx.doi.org/10.1016/j.csda.2006.12.044
- Li, Z.Y. and Li, D.G. (2008) Strong Approximation for Moving Average Processes under Dependence Assumptions. Acta Mathematica Scientia, 28, 217-224. http://dx.doi.org/10.1016/S0252-9602(08)60023-5
- Box, G.E.P., Jenkins, G.M. and Reinsel, G.C. (1994) Time Series Analysis: Forecasting and Control. 3rd Edition, Prentice-Hall, Englewood Cliffs.
- Okereke, O.E., Iwueze, I.S. and Johnson, O. (2013) Extrema of Autocorrelation Coefficients for Moving Average Processes of Order Two. Far East Journal of Theoretical Statistics, 42, 137-150.
- Al-Marshadi, A.H. (2012) Improving the Order Selection of Moving Average Time Series Model. African Journal of Mathematics and Computer Science Research, 5, 102-106.
- Adewumi, M. (2014) Solution Techniques for Cubic Expressions and Root Finding. Courseware Module, Pennsylvania State University, Pennsylvania.
- Okereke, O.E., Iwueze, I.S. and Johnson, O. (2014) Some Contributions to the Solution of Cubic Equations. British Journal of Mathematics and Computer Science, 4, 2929-2941. http://dx.doi.org/10.9734/BJMCS/2014/10934
- Wei, W.W.S. (2006) Time Series Analysis, Univariate and Multivariate Methods. 2nd Edition, Pearson Addision Wesley, New York.
- Chatfield, C. (1995) The Analysis of Time Series. 5th Edition, Chapman and Hall, London.
- Palma, W. and Zevallos, M. (2004) Analysis of the Correlation Structure of Square of Time Series. Journal of Time Series Analysis, 25, 529-550. http://dx.doi.org/10.1111/j.1467-9892.2004.01797.x
- Iwueze, I.S. and Ohakwe, J. (2011) Covariance Analysis of the Squares of the Purely Diagonal Bilinear Time Series Models. Brazilian Journal of Probability and Statistics, 25, 90-98. http://dx.doi.org/10.1214/09-BJPS111
- Iwueze, I.S. and Ohakwe, J. (2009) Penalties for Misclassification of First Order Bilinear and Linear Moving Average Time Series Processes. http://interstatjournals.net/Year/2009/articles/0906003.pdf
- Okereke, O.E. and Iwueze, I.S. (2013) Region of Comparison for Second Order Moving Average and Pure Diagonal Bilinear Processes. International Journal of Applied Mathematics and Statistical Sciences, 2, 17-26.
- Montgomery, D.C., Jennings, C.L. and Kaluchi, M. (2008) Introduction to Time Series Analysis and Forecasting. John Wiley and Sons, New Jersey.
- Sittinger, B.D. (2010) The Second Derivative Test. www.faculty.csuci.edu/brian.sittinger/2nd_Derivtest.pdf