Applied Mathematics
Vol.5 No.13(2014), Article ID:47882,12 pages
DOI:10.4236/am.2014.513194
Solution of Multi-Delay Dynamic Systems by Using Hybrid Functions
K. Maleknejad, R. Ezzati, T. Damercheli*
Department of Mathematics, College of Basic Sciences, Karaj Branch, Islamic Azad University, Alborz, Iran
Email: maleknejad@iust.ac.ir, ezati@kiau.ac.ir, *t.damercheli@kiau.ac.ir
Copyright © 2014 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 3 April 2014; revised 20 May 2014; accepted 4 June 2014
ABSTRACT
In this paper, we present a method for finding the solution of the linear multi-delay systems (MDS) by using the hybrid of the Block-Pulse functions and the Bernoulli polynomials. In this approach, the MDS is reduced to a system of linear algebraic equations by expanding various time functions for the hybrid functions and using operational matrices. To demonstrate the validity and the applicability of the technique, some examples are presented.
Keywords:Block-Pulse Functions, Bernoulli Polynomials, Multi-Delay Systems

1. Introduction
Delays occur frequently in biological, chemical, transportation, electronic, communication, manufacturing and power systems [1] . Time-delay and multi-delay systems are therefore very important classes of systems whose control and optimization have been of interest to many investigators [2] -[5] . While modeling such phenomena naturally requires the use of various systems, in many problems, such systems can not be solved explicitly. Therefore, it is important to find their approximate solutions by using some numerical methods. In recent years, the hybrid functions consisting of the combination of the Block-Pulse functions with the Chebyshev polynomials [6] , the Legendre polynomials [7] [8] , or the Taylor series [9] [10] have been shown to be a mathematical power tool for discretization of selected problems. Among these three hybrid functions, hybrids of the BlockPulse functions with the Legendre polynomials have been shown to be computationally more effective.
Recently a new hybrid function consisting of the combination of the Block-Pulse
functions with the Bernoulli polynomials is presented
[11] [12] . The advantages of the Bernoulli
polynomials , over shifted the Legendre polynomials
are:
, over shifted the Legendre polynomials
are:
• The operational matrix , in the Bernoulli polynomials, has less
errors than
, in the Bernoulli polynomials, has less
errors than
 for shifted the Legendre polynomials for
for shifted the Legendre polynomials for![]() . This is because for
. This is because for
 in
in
 we ignore the term
we ignore the term
 while for
while for
 in
in
 we ignore the term
we ignore the term .
.
• The Bernoulli polynomials have less terms than shifted the Legendre polynomials.
For example , has 5 terms while
, has 5 terms while , has 7 terms, and this difference
will increase by increasing m. Hence for approximating an arbitrary function we
use less CPU time by applying the Bernoulli polynomials as compared to the shifted
Legendre polynomials.
, has 7 terms, and this difference
will increase by increasing m. Hence for approximating an arbitrary function we
use less CPU time by applying the Bernoulli polynomials as compared to the shifted
Legendre polynomials.
• The coefficient of individual terms in the Bernoulli polynomials , is smaller than the coefficient of individual
terms in the shifted Legendre polynomials
, is smaller than the coefficient of individual
terms in the shifted Legendre polynomials . Since the computational errors in the
product are related to the coefficients of individual terms, the computational errors
are less by using the Bernoulli polynomials.
. Since the computational errors in the
product are related to the coefficients of individual terms, the computational errors
are less by using the Bernoulli polynomials.
In the present paper, we use the hybrid functions consisting of the combination of the Block-Pulse functions and the Bernoulli polynomials to solve the MDS. The method is based on converting the MDS into a system of multi-delay integral equations through integration. To eliminate integral operations, the unknown functions and various functions involved in the equations are approximated by the hybrid function and the operational matrices are used. To this end, operational matrices of multi-delay systems for the hybrid function are given. It will be seen that the operational matrices have many zero elements and are more sparse than the Legendre polynomials. These matrices are used to reduce the solution of MDS to the solution of a system of linear algebraic equations.
The paper is organized as follows: In Section 2, we describe the basic properties of the hybrid functions of the Block-Pulse and the Bernoulli polynomials required for our subsequent development. Section 3 is devoted to the formulation of linear time-varying multi-delay systems and the proposed numerical method is applied to the MDS. And in Section 4, we report our numerical findings and demonstrate the accuracy of the proposed scheme by considering some numerical examples. Finally, Section 5 gives some brief conclusions.
2. Hybrid of the Block-Pulse Functions and the Bernoulli Polynomials
Hybrid functions , are defined on the interval
, are defined on the interval
 as [11]
as [11]
 (1)
(1)
where
 and
and
 are the order of the Block-Pulse functions and the Bernoulli polynomials, respectively.
The Bernoulli polynomials of order
are the order of the Block-Pulse functions and the Bernoulli polynomials, respectively.
The Bernoulli polynomials of order
 are defined in [13] by
are defined in [13] by
where , are the Bernoulli numbers. These numbers are a sequence
of signed rational numbers that arise in the series expansion of trigonometric functions
[14] and can be defined by the identity
, are the Bernoulli numbers. These numbers are a sequence
of signed rational numbers that arise in the series expansion of trigonometric functions
[14] and can be defined by the identity

Let
 be an arbitrary element in
be an arbitrary element in , there exist unique coefficients
, there exist unique coefficients
 such that
[11]
such that
[11]
where
![]()
and

By using Equation (2) we obtain


where

 , and
, and
 denotes the inner product. So we get
denotes the inner product. So we get

with


where
![]() is a matrix of order
is a matrix of order
 and is given by
and is given by
 (2)
(2)
Integration of the vector
 defined in Equation (4) can be approximated by
defined in Equation (4) can be approximated by
 (3)
(3)
where
 is the
is the
 operational matrix for integration and is given by [11]
operational matrix for integration and is given by [11]
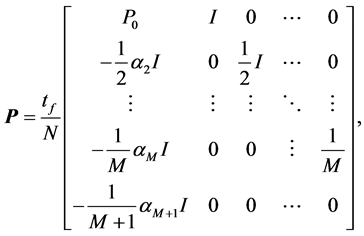 (4)
(4)
where
 and
and
![]() are the
are the
![]() identity and zero matrices, respectively, and
identity and zero matrices, respectively, and
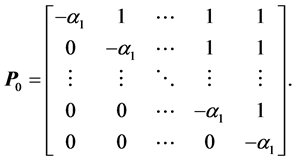 (5)
(5)
The following property of the product of two hybrid function vectors will also be used. Let
 (6)
(6)
where
 is a
is a
 product operational matrix. To illustrate the calculation procedure see
[11]
.
product operational matrix. To illustrate the calculation procedure see
[11]
.
Multi-Delay Operational Matrix
The delay functions ,
,
 are the shift of the function
are the shift of the function
 defined in Equation (4), along the time axis by
defined in Equation (4), along the time axis by![]() , where
, where
 are rational numbers in
are rational numbers in . It is assumed without loss of generality
that
. It is assumed without loss of generality
that . If we expand
. If we expand
 in terms of
in terms of , we find
, we find

where
 is the
is the
 delay operational matrix of hybrid functions corresponding to
delay operational matrix of hybrid functions corresponding to
![]() and is given by
and is given by
 (7)
(7)
where elements of the delay matrix are the
![]() matrix
matrix
 given by
given by
 (8)
(8)
It is noted that the first 1 in the first row is located at the
 th column where
th column where

We define
 as the smallest positive integer number for which
as the smallest positive integer number for which
 for
for
 and
and
![]() is the greatest common divisor of the integers
is the greatest common divisor of the integers ,
, .
.
3. Problem Statement and Approximation Using Hybrid Functions
Consider the following linear time multi-delay dynamic systems:
 (9)
(9)
 (10)
(10)
 (11)
(11)
where![]() ,
,
![]() ,
,
 and
and ,
,
 , are matrices of appropriate dimensions,
, are matrices of appropriate dimensions,
 is a constant specified vector, and
is a constant specified vector, and
 is an arbitrary known function. The problem is to find
is an arbitrary known function. The problem is to find ,
,
 satisfying Equations (13) and (14). Let
satisfying Equations (13) and (14). Let
 (12)
(12)
![]() (13)
(13)
where
 and
and
 are the
are the
 and
and
![]() dimensional identity matrices,
dimensional identity matrices,
 is
is
 vector and
vector and
![]() denotes the Kronecker product [15] . Using the
property of the Kronecker product,
denotes the Kronecker product [15] . Using the
property of the Kronecker product,
![]() and
and
![]() are matrices of order
are matrices of order
 and
and , respectively. Assume that each
, respectively. Assume that each
 and each of
and each of ,
,
 ,
,
 , can be written in terms of hybrid functions as
, can be written in terms of hybrid functions as
![]()
Then, using Equations (15) and (16), we have
![]() (14)
(14)
where
![]() and
and
![]() are vectors of order
are vectors of order
 and
and , respectively, given by
, respectively, given by

Similarly, we have
 (15)
(15)
where
 and
and ,
,
 , are vectors of order
, are vectors of order
 given by
given by

Let approximate
 and
and ,
,
 , by Equations (2)-(4) as follows
, by Equations (2)-(4) as follows
![]() (16)
(16)
where ,
,
 are of dimensions
are of dimensions , and
, and
![]() is of dimension
is of dimension .
.
We can also write ,
,
 , in terms of the hybrid functions as
, in terms of the hybrid functions as
where
![]()
and
 is the delay operational matrix. Moreover
is the delay operational matrix. Moreover
 (17)
(17)
 (18)
(18)
where

and

where ,
,
 , are constant matrices of order
, are constant matrices of order . Note
. Note
![]() is
is
 product operational matrix that to illustrate the calculation procedure we choose
product operational matrix that to illustrate the calculation procedure we choose
![]() and
and![]() . Thus we have
. Thus we have

 (19)
(19)
where
![]() and
and![]() , are the
, are the
![]() matrices given by
matrices given by

By integrating Equation (12) from
![]() to
to
 and using Equations (15)-(22), we have
and using Equations (15)-(22), we have
 (20)
(20)
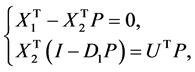
simplifying Equation (23) we obtain
 (21)
(21)
by solving the set of linear algebraic equations Equation (24), we obtain the coefficients
vector![]() .
.
4. Numerical Implementation
In this section, to give a clear overview of the analysis method presented and to demonstrate the applicability and accuracy of the method three examples are given.
Example 1. Consider the multi-delay dynamic system from [7] described by
 (22)
(22)
with
 (23)
(23)
and
 (24)
(24)
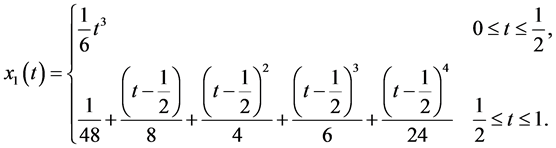
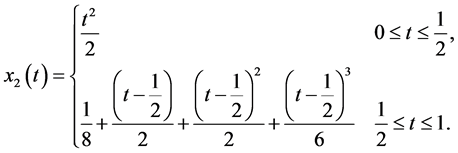
The exact solutions are


To solve this problem by the hybrid functions, we select
![]() and
and![]() . Let
. Let
![]() (25)
(25)
where ,
,
 and
and
 can be obtained similarly to Equations (3) and (4). By expanding
can be obtained similarly to Equations (3) and (4). By expanding
 and
and
 in terms of the hybrid functions we get
in terms of the hybrid functions we get
 (26)
(26)
 (27)
(27)
Therefore, we have
 (28)
(28)
 (29)
(29)
where
![]() and
and
 the 24 × 24 matrices, can be calculated as Equation (19). Also D1 and
D2 are the 24 ×24 delay operational matrices given by
the 24 × 24 matrices, can be calculated as Equation (19). Also D1 and
D2 are the 24 ×24 delay operational matrices given by

where
Integrating Equation (25) from
![]() to
to
 and using Equations (26)-(27) and substituting Equations (28)-(32) we get
and using Equations (26)-(27) and substituting Equations (28)-(32) we get
 (30)
(30)
where
 is the operational matrix of integration given in Equation (7). By solving Equation
(33) the values of
is the operational matrix of integration given in Equation (7). By solving Equation
(33) the values of
 and
and
 can be found as
can be found as


To define
 and
and
 for
for
 in the interval
in the interval
 we map
we map
 into
into
 by mapping
by mapping
 into
into![]() , and for
, and for
 in the interval
in the interval
 we map this interval into
we map this interval into
 by mapping
by mapping
 into
into![]() , and similarly for the other intervals. From Equation (28)
we get
, and similarly for the other intervals. From Equation (28)
we get

After simplifying the same value as the exact
 and
and
 would be obtained.
would be obtained.
Example 2. Consider the delay dynamic system described by
 (31)
(31)
with
 (32)
(32)
and
 (33)
(33)
The exact solutions are
To solve this problem by using of the hybrid functions, we select
![]() and
and![]() . Let
. Let
![]() (34)
(34)
where ,
,
 and
and
 can be obtained similarly to Equations (3)-(4). Using Equation (37) we get
can be obtained similarly to Equations (3)-(4). Using Equation (37) we get
where
 is the
is the
 delay operational matrix given by
delay operational matrix given by

where
 (35)
(35)
By expanding
 in terms of hybrid functions we obtain
in terms of hybrid functions we obtain
![]() (36)
(36)
Integrating Equation (34) from
![]() to
to
 and using Equations (35)-(36) and substituting Equations (37)-(39), we get
and using Equations (35)-(36) and substituting Equations (37)-(39), we get
 (37)
(37)
where
 is the operational matrix of integration given in Equation (7). By solving Equation
(40) the values of
is the operational matrix of integration given in Equation (7). By solving Equation
(40) the values of
 and
and
 can be found. By using from Equation (37) and simplifying the same value as the
exact
can be found. By using from Equation (37) and simplifying the same value as the
exact
 and
and
 would be obtained.
would be obtained.
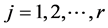
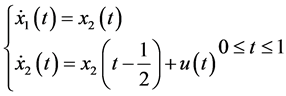
Example 3. Consider the following multi-delay system with delay in both control and state described by
 (38)
(38)
with
 (39)
(39)
and
 (40)
(40)
The exact solutions are
To solve this problem by using the hybrid functions, we select
![]() and
and![]() . Let
. Let
![]() (41)
(41)
where ,
,
 and
and
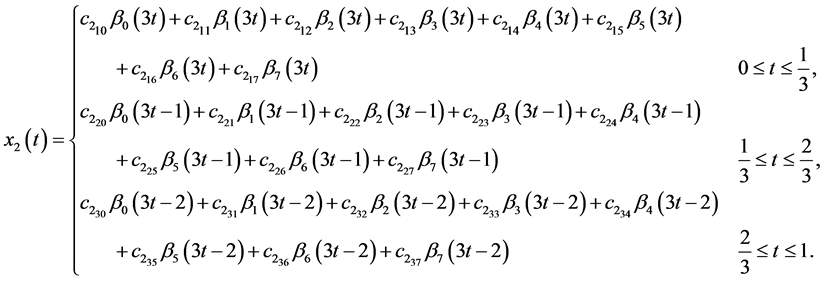
 can be obtained similarly to Equations (3) and (4). By expanding
can be obtained similarly to Equations (3) and (4). By expanding
 and
and
 in terms of hybrid functions we get
in terms of hybrid functions we get
![]() (42)
(42)
Using Equation (44) and (45) we obtain
 (43)
(43)
where
 and
and
 are the
are the
 delay operational matrices given by
delay operational matrices given by
 (44)
(44)
where

By integrating Equation (41) from 0 to t and using Equations (42) and (43) and substituting Equations (44) and (47), we get
 (45)
(45)
where
 is the operational matrix of integration given in Equation (7). By solving Equation
(48) the values of
is the operational matrix of integration given in Equation (7). By solving Equation
(48) the values of
 and
and
 can be found. By using from Equation (44) and simplifying the same value as the
exact
can be found. By using from Equation (44) and simplifying the same value as the
exact
 and
and
 would be obtained. In Table 1 a comparison is made
between the exact solution and the approximation solution of
would be obtained. In Table 1 a comparison is made
between the exact solution and the approximation solution of
 and
and
 for
for![]() . The approximation value of
. The approximation value of
 and
and
 on
on , is the same as the exact solution.
, is the same as the exact solution.
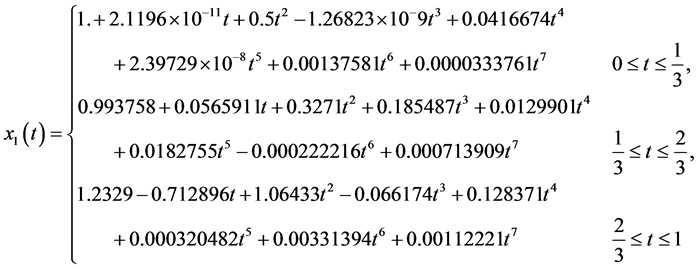
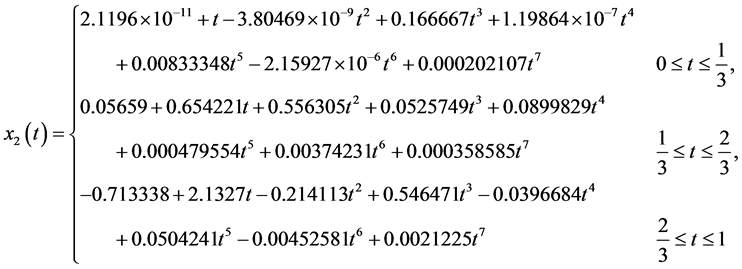

Table 1. Approximate solutions and exact solutions of Example 3.
5. Conclusion
The hybrid of the Block-Pulse functions and the Bernoulli polynomials and the associated
operational matrices of integration and delay are applied to solve the linear multi-delay
dynamic systems. The method is computationally very attractive, at the same time
keeping the accuracy of the solution. It is also shown that the hybrid functions
provide exact solutions in each subintervals for Examples 1, 2 and 3. The presented
method reduces multi-delay systems to the solution a system of algebraic equations,
and so the calculation is easy. The matrices![]() ,
,
 and
and
 in Equations (5), (7) and (10) are sparse, hence the present method is very attractive
and reduces the CPU time and computer memory.
in Equations (5), (7) and (10) are sparse, hence the present method is very attractive
and reduces the CPU time and computer memory.
References
- Malek-Zavarei, M. and Jamshidi, M. (1987) Time Delay Systems: Analysis, Optimization and Applications (North-Holland Systems and Control Series). Elsevier Science, New York.
- Harrison, R.F. (1993) Optimal Control of Vehicle Suspension Dynamics Incorporating Front-to-Rear Excitation Delays: An Approximate Solution. Journal of Sound and Vibration, 168, 339-354. http://dx.doi.org/10.1006/jsvi.1993.1377
- Lee, Y.S. and Maurer, P. (1995) A Compiled Event-Driven Multi Delay Simulator. Technical Report Number DA-30, Department of Computer Science and Engineering, University of South Florida, Tampa.
- Cai, G. and Huang, J. (2002) Optimal Control Method with Time Delay in Control. Journal of Sound and Vibration, 251, 383-394. http://dx.doi.org/10.1006/jsvi.2001.3999
- Ji, J.C. and Leung, A.Y.T. (2002) Resonances of a Non-Linear s.d.o.f. System with Two Time-Delays in Linear Feedback Control. Journal of Sound and Vibration, 253, 985-1000. http://dx.doi.org/10.1006/jsvi.2001.3974
- Razzaghi, M. and Marzban, H.R. (2000) Direct Method for Variational Problems via Hybrid of Block-Pulse and Chebyshev Functions. Mathematical Problems in Engineering, 6, 85-97. http://dx.doi.org/10.1155/S1024123X00001265
- Marzban, H.R. and Razzaghi, M. (2004) Optimal Control of Linear Delay Systems via Hybrid of Block-Pulse and Legendre Polynomials. Journal of the Franklin Institute, 341, 279-293. http://dx.doi.org/10.1016/j.jfranklin.2003.12.011
- Maleknejad, K., Basirat, B. and Hashemizadeh, E. (2011) Hybrid Legendre Polynomials and Block-Pulse Functions Approach for Nonlinear Volterra-Fredholm Integro-Differential Equations. Computers and Mathematics with Applications, 61, 2821-2828. http://dx.doi.org/10.1016/j.camwa.2011.03.055
- Marzban, H.R. and Razzaghi, M. (2006) Solution of Multi-Delay Systems Using Hybrid of Block-Pulse Functions and Taylor Series. Journal of Sound and Vibration, 292, 954-963. http://dx.doi.org/10.1016/j.jsv.2005.08.007
- Maleknejad, K. and Mahmoudi, Y. (2004) Numerical Solution of Linear Fredholm Integral Equation by Using Hybrid Taylor and Block-Pulse Functions. Applied Mathematics and Computation, 149, 799-806. http://dx.doi.org/10.1016/S0096-3003(03)00180-2
- Haddadi, N., Ordokhani, Y. and Razzaghi, M. (2011) Optimal Control of Delay Systems by Using a Hybrid Functions Approximation. Journal of Optimization Theory and Applications, 153, 338-356. http://dx.doi.org/10.1007/s10957-011-9932-1
- Mashayekhi, S., Ordokhani, Y. and Razzaghi, M. (2012) Hybrid Functions Approach for Nonlinear Constrained Optimal Control Problems. Communications in Nonlinear Science and Numerical Simulation, 17, 1831-1843. http://dx.doi.org/10.1016/j.cnsns.2011.09.008
- Costabile, F., Dellaccio, F. and Gualtieri, M.I. (2006) A New Approach to Bernoulli Polynomials. Rendiconti di Matematica, Serie VII, 26, 1-12.
- Arfken, G. (1985) Mathematical Methods for Physicists. 3rd Edition, Academic Press, San Diego.
- Lancaster, P. (1969) Theory of Matrices. Academic Press, New York.
NOTES

*Corresponding author.