A. GOLBABAI ET AL.1467
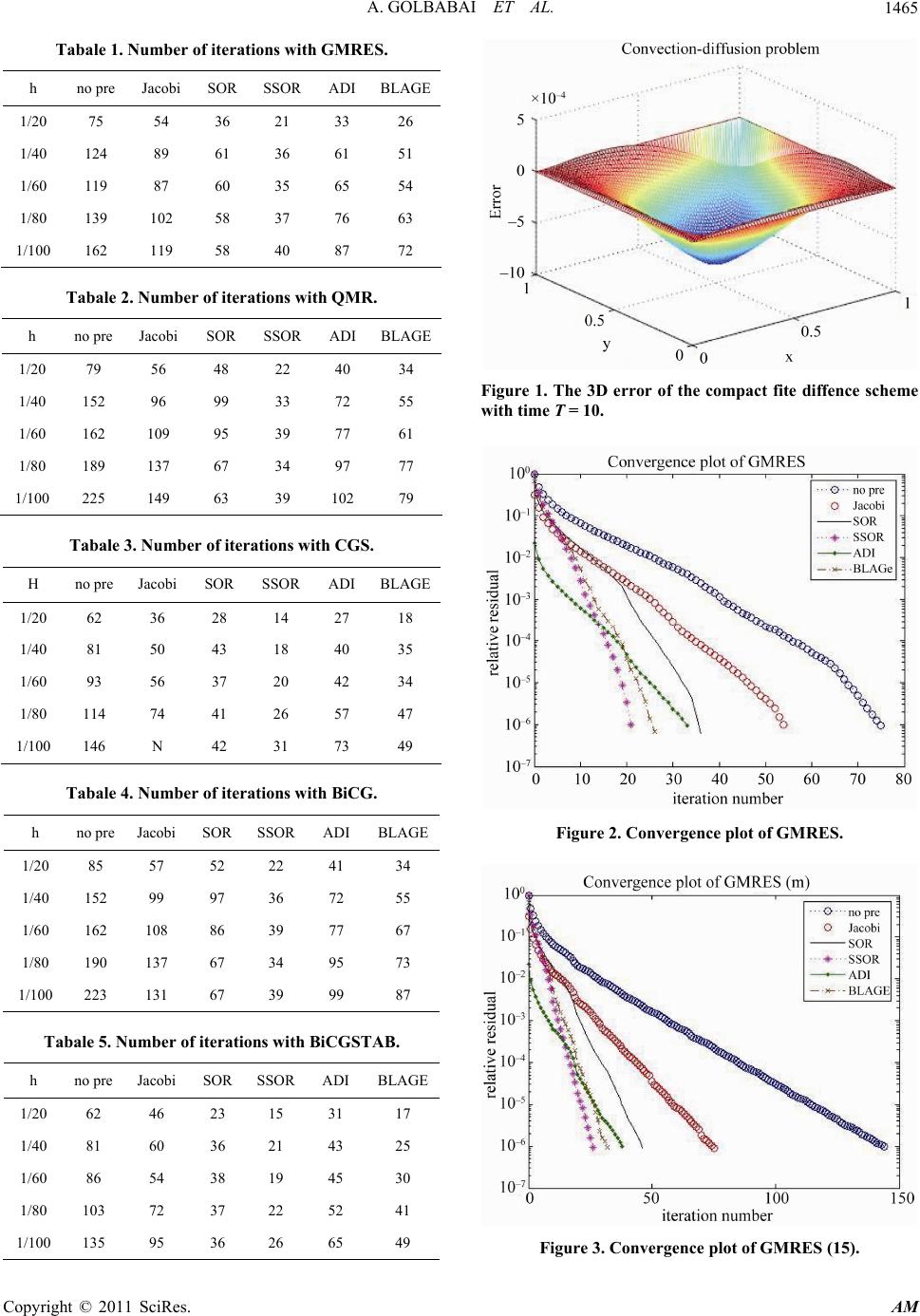
Figure 10. Distribution of eigen-values in BLAGE precon-
ditioner.
5. Conclusions
A high-order compact scheme in combination precondi-
tioner was applied successfully to Diffusion- Convection
equation. We study comparison of different precondi-
tioners in combination Krylov subspace methods. High-
order approximation are designed by the need to produce
more stable schemes which are efficient with respect to
the operation number and that do not experience difficul-
ties near boundaries. The numerical results which is given
in the previous section d emonstrate the good accuracy of
this scheme and efficiency of preconditioned Krylov sub-
space methods. We got to this conclusion that the ADI
preconditioner is effective for model problems rather
than other. So we propose using ADI preconditioner in
combination with Krylov subspace methods for solving
non-symmetric systems because this preconditioner needs
to less computing time and have the less iteration number
than other. Also, we propose the BiCGSTAB method
because of the need to less iteration number, simplicity
in implementation, flat convergence and to save in comp
tational time.
6. References
[1] L. C. Evans, “Partial Differential Equations,” American
Mathematical Society Providence, Rhode Island, 1999.
[2] A. Golbabai and M. M. Arabshahi, “A Numerical Method
for Diffusion-Convection Equation Using High-Order
Difference Schemes,” Computer Physics Communica-
tions, Vol. 181, No. 7, 2010, pp. 1224-1230.
doi:10.1016/j.cpc.2010.03.008
[3] A. Golbabai and M. M. Arabshahi, “On the Behavior of
High-Order Compact Approximations in One Dimen-
sional Sine-Gordon Equation,” Physica Scripta, Vol. 83,
No. 1, 2011, Article ID 015015.
doi:10.1088/0031-8949/83/01/015015
[4] L. C. Evans, “Partial Differential Equations,” American
Mathematical Society Providence, Rhode Island, 1999.
[5] S. Sundar and B. K. Bhagavan, “CGS, Comparison of
Krylov Subspace Methods with Preconditioning Tech-
niques for Solving Boundary Value Problems,” Com-
puters and Mathematics with Applications, Vol. 38, No.
11-12, 1999, pp. 197-206.
doi:10.1016/S0898-1221(99)00298-9
[6] A. M. Bruaset, “A Survey of Preconditioned Iterative
Methods,” Longman Scientific and Technical, UK, 1995.
[7] K. J. Hout and B. D. Welfert, “Unconditional Stability of
Second-Order ADI Schemes Applied to Multi-Dimen-
sional Diffusion Equations with Mixed Derivative Terms,”
Applied Numerical Mathematics, 2008, Article in Press.
[8] S. Ma and Y. Saad, “Block-ADI Preconditioners for
Solving Sparse Non-Symmetric Linear Systems of Equa-
tions,” Numerical Linear Algebra, 1993, pp. 165-178.
[9] M. Bhuruth and D. J. Evans, “Block Alternating Group
Explicit Preconditioning (BLAGE) for a Class of Fourth-
Order Difference Schemes,” International Journal of
Computer Mathematics, Vol. 63, No. 1-2, 1997, pp. 121-
136. doi:10.1080/00207169708804555
[10] M. K. Jain, R. K. Jain and R. K. Mohanty, “Fourth-Order
Finite Difference Method for 2-D Parabolic Partial Dif-
ferential Equations with Non-Linear First-Derivative
Terms,” Numerical Methods for Partial Differential
Equations, Vol. 8, No. 1, 1992, pp. 21-31.
doi:10.1002/num.1690080102
[11] G. I. Shishkin and L. P. Shishkina, “A Higher Order
Richardson Scheme for a Singularly Perturbed Semilinear
Elliptic Convection-Diffusion Equation,” Computational
Mathematics and Mathematical Physics, Vol. 50, No. 3,
2010, pp. 437-456. doi:10.1134/S0965542510030061
[12] Y. Zhang, “Matrix Theory Basic Results and Tech-
niques,” Springer, Berlin, 1999.
[13] R. Barrett, et al., “Templates for the Solution of Linear
Systems: Building Blocks for Iterative Methods,” Society
for Industrial and Applied Mathematics (SIAM), 1994, pp.
xvii+118. doi:10.1137/1.9781611971538
[14] Y. Saad, “Iterative Methods for Sparse Linear Systems,”
Second Edition, PWS Publishing Company, Boston,
2000.
[15] H. A. Van der Vorst, “Iterative Krylov Subspace Methods
for Large Linear Systems,” Cambridge University Press,
Cambridge, 2003. doi:10.1017/CBO9780511615115
[16] O. Axelsson, “Iterative Solution Methods,” Cambridge
University Press, New York, 1996.
[17] M. H. Koulaei and F. Toutounian, “On Computing of
Block ILU Preconditioner for Block Tri-Diagonal Sys-
tems,” Journal of Computational and Applied Mathemat-
ics, Vol. 202, No. 2, 2007, pp. 248-257.
doi:10.1016/j.cam.2006.02.029
[18] R.C. Mittal and A.H. Al-Kurdi, “An Efficient Method for
Constructing an ILU Preconditioner for Solving Large
Sparse Non-Symmetric Linear Systems by the GMRES
Method,” Computers and Mathematics with Applications,
Vol. 45, 2003, pp. 1757-1772.
Copyright © 2011 SciRes. AM