Paper Menu >>
Journal Menu >>
 Wireless Sensor Network, 2010, 2, 285-292 doi:10.4236/wsn.2010.24039 Published Online April 2010 (http://www.SciRP.org/journal/wsn) Copyright © 2010 SciRes. WSN Data Discrimination in Fault-Prone Sensor Networks Xiaoning Cui1,2,3,4,5, Qing Li4,5, Baohua Zhao1,2,3,4 1School of Computer Science and Technology, University of Science and Technology of China, Hefei, China 2State Key Laboratory of Networking and Switching Technology, Beijing, China 3Province Key Laboratory of Software in Computing and Communication, Hefei, China 4Joint Research Lab of Excellence, CityU-USTC Advanced Research Institute, Suzhou, China 5Department of Computer Science, City University of Hong Kong, Hong Kong, China E-mail: cxning@mail.ustc.edu.cn, itqli@cityu.edu.hk, bhzhao@ustc.edu.cn Received January 31, 2010; revised February 22, 2010; accepted February 24, 2010 Abstract While sensor networks have been used in various applications because of the automatic sensing capability and ad-hoc organization of sensor nodes, the fault-prone characteristic of sensor networks has challenged the event detection and the anomaly detection which, to some extent, have neglected the importance of dis- criminating events and errors. Considering data uncertainty, in this article, we present the problem of data discrimination in fault-prone sensor networks, analyze the similarities and the differences between events and errors, and design a multi-level systematic discrimination framework. In each step, the framework filters erroneous data from the raw data and marks potential event samples for the next-step processing. The raw data set D is finally partitioned into three subsets, Devent, Derro r and Dordina ry. Both the scenario-based simula- tions and the experiments on real-sensed data are carried out. The statistical results of various discrimination metrics demonstrate high distinction ratio as well as the robustness in different cases of the network. Keywords: Data Discrimination, Fault-Prone Sensor Network, Event, Error, Distinction Ratio 1. Introduction One of the major applications of sensor networks is event detection [1], while the data uncertainty caused by faulty sensors increases the difficulty of distinguishing between events and errors in sensor data, and correspondingly affects the design of data processing framework in a sensor network. Due to the rather limited resource and fault-prone characteristics in sensor networks, the design principle of sensor data processing mainly lies in simple operation, fault tolerance, distributed processing and efficient distinction between erroneous measurements and events [2,3]. The major techniques of anomaly de- tection include histogram-based method [4], kernel esti- mation [5,6], ranking/score-based method [7,8], depend- ency analysis [9], and etc. There are also some extensive research works on the region detection of anomalous sensor readings [10,11]. However, to the best of our knowledge, most of these works either separate event detection and error detection into two problems or am- biguously perceive events and errors as anomalies. Ac- cording to the summary of the state-of-the-art anomaly detection techniques [12], there lack sufficient concern of the discrimination between events and errors in sensor data processing [3]. Therefore, in this article, we focus on designing a discrimination framework to solve this problem. The rest of the article is organized as follows. In Sec- tion 2, the problem is analyzed based on the similarities and differences between events and errors. In Section 3, a discrimination framework is illustrated. The perform- ance of the framework is evaluated by two scenario- based simulations and a series of experiments on a real-world sensor dataset in Section 4, and finally, Sec- tion 5 concludes the article with some discussions on the potential extension of the framework. 2. Problem Analysis The problem of distinguishing between events and errors has been investigated based on a few common assump- tions [13]: 1) the network holds a hierarchical structure and sensor data are forwarded to nearby local fusion centers to handle data processing; 2) all of the data re- ceived by the fusion center are not corrupted by any communication fault; 3) there are no malicious attacks 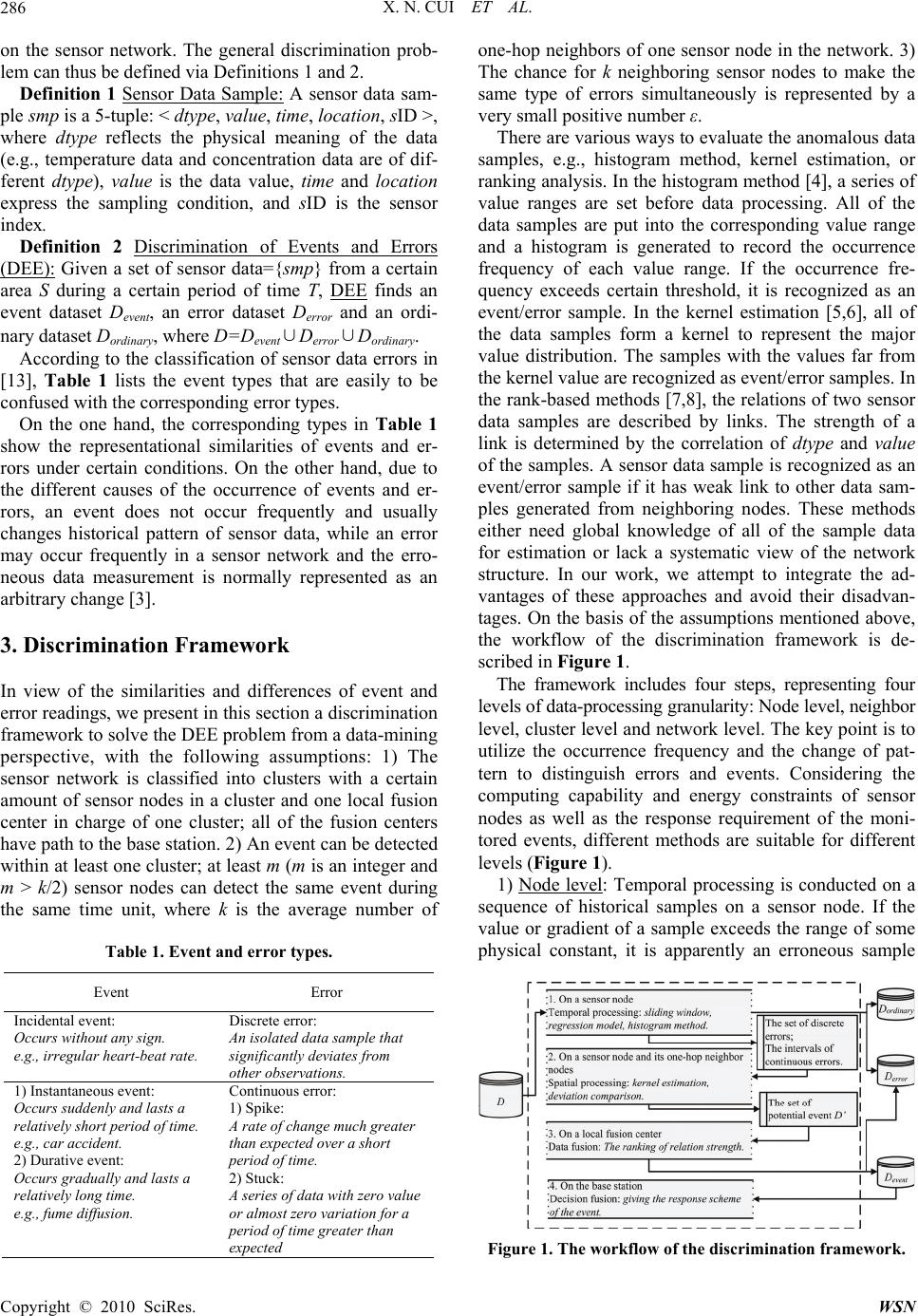 X. N. CUI ET AL. 286 on the sensor network. The general discrimination prob- lem can thus be defined via Definitions 1 and 2. Definition 1 Sensor Data Sample: A sensor data sam- ple smp is a 5-tuple: < dtype, value, time, loca tion, sID >, where dtype reflects the physical meaning of the data (e.g., temperature data and concentration data are of dif- ferent dtype), value is the data value, time and location express the sampling condition, and sID is the sensor index. Definition 2 Discrimination of Events and Errors (DEE): Given a set of sensor data={smp} from a certain area S during a certain period of time T, DEE finds an event dataset D event, an error dataset D error and an ordi- nary dataset Dordinary, where D=Devent∪Derror∪Dordinary. According to the classification of sensor data errors in [13], Table 1 lists the event types that are easily to be confused with the corresponding error types. On the one hand, the corresponding types in Table 1 show the representational similarities of events and er- rors under certain conditions. On the other hand, due to the different causes of the occurrence of events and er- rors, an event does not occur frequently and usually changes historical pattern of sensor data, while an error may occur frequently in a sensor network and the erro- neous data measurement is normally represented as an arbitrary change [3]. 3. Discrimination Framework In view of the similarities and differences of event and error readings, we present in this section a discrimination framework to solve the DEE problem from a data-mining perspective, with the following assumptions: 1) The sensor network is classified into clusters with a certain amount of sensor nodes in a cluster and one local fusion center in charge of one cluster; all of the fusion centers have path to the base station. 2) An event can be detected within at least one cluster; at least m (m is an integer and m > k/2) sensor nodes can detect the same event during the same time unit, where k is the average number of Table 1. Event and error types. Event Error Incidental event: Occurs without any sign. e.g., irregular heart-beat rate. Discrete error: An isolated data sample that significantly deviates from other observations. 1) Instantaneous event: Occurs suddenly and lasts a relatively short period of time. e.g., car accident. 2) Durative event: Occurs gradually and lasts a relatively long time. e.g., fume diffusion. Continuous error: 1) Spike: A rate of change much greater than expected over a short period of time. 2) Stuck: A series of data with zero value or almost zero variation for a period of time greater than expected one-hop neighbors of one sensor node in the network. 3) The chance for k neighboring sensor nodes to make the same type of errors simultaneously is represented by a very small positive number ε. There are various ways to evaluate the anomalous data samples, e.g., histogram method, kernel estimation, or ranking analysis. In the histogram method [4], a series of value ranges are set before data processing. All of the data samples are put into the corresponding value range and a histogram is generated to record the occurrence frequency of each value range. If the occurrence fre- quency exceeds certain threshold, it is recognized as an event/error sample. In the kernel estimation [5,6], all of the data samples form a kernel to represent the major value distribution. The samples with the values far from the kernel value are recognized as event/error samples. In the rank-based methods [7,8], the relations of two sensor data samples are described by links. The strength of a link is determined by the correlation of dtype and value of the samples. A sensor data sample is recognized as an event/error sample if it has weak link to other data sam- ples generated from neighboring nodes. These methods either need global knowledge of all of the sample data for estimation or lack a systematic view of the network structure. In our work, we attempt to integrate the ad- vantages of these approaches and avoid their disadvan- tages. On the basis of the assumptions mentioned above, the workflow of the discrimination framework is de- scribed in Figure 1. The framework includes four steps, representing four levels of data-processing granularity: Node level, neighbor level, cluster level and network level. The key point is to utilize the occurrence frequency and the change of pat- tern to distinguish errors and events. Considering the computing capability and energy constraints of sensor nodes as well as the response requirement of the moni- tored events, different methods are suitable for different levels (Figure 1). 1) Node level: Temporal processing is conducted on a sequence of historical samples on a sensor node. If the value or gradient of a sample exceeds the range of some physical constant, it is apparently an erroneous sample Figure 1. The workflow of the discrimination framework. Copyright © 2010 SciRes. WSN  X. N. CUI ET AL.287 that should be put into Derror. Otherwise, the set of dis- crete errors are picked out and the samples of continuous errors are marked by interval for further processing. In our work, linear regression is used based on a fixed size of sliding window. The value differences of the predicted samples and the real-sensed samples reflect the temporal pattern of the sample sequence. Both events and errors would incur significant change of pattern and thus a higher value difference in prediction, according to which the involved samples are marked for further discrimina- tion. The rest of the samples are put into Dordinary. 2) Neighbor level: Spatial processing is used to com- pare the samples with discrete errors or continuous errors over neighboring nodes. Based on the assumptions in this section, an anomalous sample probably reflects an event if there is enough number (the number is set to be equal to or over 50% in our simulation and experiment) of neighboring nodes reporting the same data exception. Such samples are put into the set of potential events D’. Other anomalous samples belong to Derror. 3) Cluster level: The local fusion center evaluates the samples in D' with reference to Dordinary. The event sam- ples are finally selected from D' and constitute Devent. In our work, we use deviation-based ranking strategy to evaluate the samples in D' because it has been assumed that there is little chance for all of the nearby nodes (within a cluster) to get similar wrong readings. The samples in D'\Devent are added to Derror. 4) Network level: The base station gets Devent and makes decision fusion [14], i.e., taking action according to the event information. Since it does not involve the DEE problem, this level is beyond the scope of this paper. 4. Performance Evaluation The performance of the discrimination framework is evaluated by two scenario-based simulations in Subsec- tion 4.1 and an experiment based on real-sensed data in Subsection 4.2. 4.1. Scenario-Based Data Simulations Scenario 1. Irregular heart-bit rate: The heart-bit rate depicts how many times one’s heart beats per minute. A human being usually keeps a stable heart-bit rate with little fluctuations, represented as f(t) = c ± εc, where t is the moment when measuring the heart-bit rate, c, and εc is a small positive number to represent fluctuations. Ir- regular heart-bit rate means that the fluctuation exceeds the normal range, [–εc, εc]. The simulation based on Sce- nario 1 aims at evaluating the performance on discrimi- nating discrete errors with incidental events (Table 1). Considering the requirement of the report correctness and the response time, a small-scale network is simulated with less than 10 sensor nodes. Meanwhile, the node- level (Step 1) and neighbor-level (Step 2) processing are employed in the data discrimination. In Table 2, the error occurrence rate is the ratio of the amount of erroneous samples over the total amount of the samples. It is set from 10% to 50%, which is large enough compared with the event occurrence rate (≤ 1%). This is consistent with the frequency difference of errors and events. A sample is recognized as either an ordinary sam- ple or a potential-event sample in node-level processing, except those which exceed the normal value range. The neighbor level processing further discriminates events and errors in the potential-event sample set. Therefore, c6 is the distinction ratio in node-level processing (Step 1) and the sum of r7, r8 and r9 is the distinction ratio in neighbor- level processing (Step 2). Given a set of sensor nodes measuring the heart-bit rate of a person, the parameters are configured following Table 2. Specifically, the simulations are conducted through the following two cases. Case 1. Slower heart-bit rate Figure 2 shows the comparison of the distinction Table 2. Parameter configuration of Scenario 1. Parameters General parameters Data amount: 1.44 × 107 heart-bit rate samples per node with error/event injection; Sampling frequency: 1kHz; Error occurrence rate ≤ 50%; Error type: discrete error; Event occurrence rate ≤ 1%; Event type: incidental event; Normal heart-bit rate value range: [60,100]; Error/Event value range: [50,60) for slower heart-bit rate and (100,199] for faster heart-bit rate. Step 1 (node level) Window length: 4000 samples(data in 4 seconds); Sliding ratio: 25% (1000 samples, data in 1 second). Evaluation metr i c s (for Step1) c1-mistaking errors for ordinary samples; c2-marking errors as potential events; c3-marking ordinary readings as potential events; c4-mistaking events for ordinary samples; c5-marking events for potential events; c6-correct distinction of ordinary samples; c1 + c2 + c3+ c4 + c5 + c6 = 1; Distinction ratio (Step 1) = c2. Step 2 (neighbor level)Average number of 1-hop neighbors: 2 Evaluation metr i c s (for Step2) r1-mistaking errors for ordinary samples; r2-mistaking errors for events; r3-mistaking ordinary readings for events; r4-mistaking ordinary readings for errors; r5-mistaking events for ordinary samples; r6-mistaking events for errors; r7-correct distinction of error samples; r8-correct distinction of events samples; r9-correct distinction of ordinary samples; r1 + r2 + r3 + r4 + r5 + r6+ r7 + r8 + r9 = 1; Distinction ratio (Step 2) = r7 + r8 + r9; False Alarm = r2 + r3; Miss Hit = r5 + r6. Copyright © 2010 SciRes. WSN  X. N. CUI ET AL. 288 Figure 2. Distinction ratio in each step of Case 1. ratios after Steps 1 and 2. The distinction ratio after Step 1 declines with the increase of error occurrence rate, from 89.78% (when error occurrence rate = 10%) to 60.3 % (when error occurrence rate = 50%). However, Step 2 achieves similar distinction ratio over 90% even though the error occurrence rate is as high as 50%. Moreover, as shown in Figure 3, the distinction ratios of event and ordinary samples both approach 100%. The distinction ratio of errors slightly goes down from 97% (when error occurrence rate = 10%) to 84% (when error occurrence rate = 50%). Furthermore, Figure 4 shows the false-alarm rate and the miss-hit rate for Case 1. On one hand, the false-alarm rate grows larger with the increase of the error occur- rence rate. The statistical result has shown that the in- crease of error occurrence rate has accelerated the grow- ing of the false-alarm rate. On the other hand, there is almost no miss-hit in the data set. Case 2. Faster heart-bit rate Case 2 tests the performance on faster heart-beat rate monitored by sensor networks. It is similar to Case 1, except that the value ranges of event samples are differ- ent. Figure 5 shows the step-wise comparison of the distinction ratios. The trends are similar to that of Fig- ure 2, i.e., the distinction ratio varies from 90.39% (when error occurrence rate = 10%) down to 59.83% (when error occurrence rate = 50%) after Step 1, and the ratio increases to at least 93.31% after Step 2. When er- ror occurrence rate =10%, such a ratio achieves as high as 99.70%. Figure 6 compares the distinction ratio of error sam- ples, event samples and ordinary samples in Case 2. Similarly to that in Case 1, the distinction ratio of errors declines with the increase of erroneous data amount in the data set, and the distinction of ordinary samples keeps a stable ratio of near 100%. The event samples are well discriminated under most conditions except when error occurrence rate = 30%, where 1/6 event samples are mistaken for error samples. This is because, in the test case, many of the event samples are cross-occurred with error samples within the same sliding window. It means that the distinction ratio of event samples is not affected by the error occurrence rate, but by when and where an event and/or an error occur. Figure 3. Comparison of distinction ratio of error (r7/(r1 + r2 + r7)), event (r8/(r5 + r6 + r8)) and ordinary samples (r9/(r3 + r4 + r9)) of Case 1. 0.17% 0.00% Figure 4. False-alarm and miss-hit rate of Case 1. Figure 5. Distinction ratio in each step of Case 2. Figure 6. Comparison of distinction ratio of error, event and ordinary samples of Case 2. Figure 7 further gives the false-alarm rate and miss- hit rate of Case 2. The values and trends are similar to that in Case 1. Scenario 2. Car accident: In the industry of car manu- facture, accidents occur often due to acceleration. Ex- perience tells that, when the sampling rate = 1 kHz and the absolute acceleration (In the rest of this paper, we use the word “acceleration” to represent “absolute accelera- Copyright © 2010 SciRes. WSN  X. N. CUI ET AL.289 tion” for short.) exceeds 47 m/s2 between two consecu- tive samples, car collision is expected to happen (see, e.g., Figure 8 when time = 8 ms, acceleration = 50 m/s2). Meanwhile, the response time of a car accident should be less than 20ms so that the air bag could be triggered and the driver could have enough time to take action. There are usually 4 sensor nodes located at 4 wheels of a car and a fusion center to integrate the samples, so node-level (Step 1) and cluster-level (Step 2) processing are employed in the simulation. Considering the change pattern of the acceleration in Figure 8, an integra- tion-based method is used in order to separate event samples from erroneous samples, i.e., calculate the inte- gration of the sample values within a sliding window using Formula (1), and check whether the numerical in- tegration exceeds a certain threshold: 1 1 (, )() n ink Snk ai f (1) where f is the sampling rate, n is the total amount of sam- ples and k is the window length. When f = 1 kHz and k is set to 7 ms, the threshold is calculated by 0.5 × 7 × 47 = 164.5, indicating the linear changing process of the accel- eration from 0 m/s2 to 47 m/s2 within a sliding window. Similar to Table 2, Table 3 lists the parameter con- figuration of the simulation. Figure 9 compares the distinction ratio of error sam- ples, event samples and ordinary samples of Scenario 2. Since both the event pattern and the error types are more complex in Scenario 2 than that in Scenario 1, the dis- tinction ratios are generally lower than those in Scenario 1. However, the trends are the same, i.e., higher-level processing will increase the distinction ratio. 0.08% 0.00% Figure 7. False-alarm and miss-hit rate of Case 2. Figure 8. The change pattern of the acceleration in a car accident. Table 3. Parameter configuration of Scenario 2. Parameters General parameters Data amount: 1000 acceleration samples (1-second data) per node with error/event injection; Sampling frequency: 1kHz; Error occurrence rate ≤ 50%; Error type: Discrete and continuous errors; Event occurrence rate ≤ 1%; Event type: instantaneous event; Normal acceleration range: [-2,2] (m/s2); Error value range:[-100,100] (m/s2); Event pattern: Following Figure 8. Step 1 (node level) Window length: 7 samples (data in 7ms); Sliding ratio: 1/7 (data in 1ms). Evaluation metr i c s (for Step1) Distinction ratio (Step 1): The same as in Table 2. Step 2 (cluster level) The size of a fusion unit: 4 sensor nodes Evaluation metr i c s (for Step2) Distinction ratio (Step 2): Calculated by error type. Figure 9. Distinction ratio in each step of Scenario 2. Furthermore, Figure 10 compares the distinction ratios of discrete error (79.59% in average) and continuous error (84.80% in average). It is shown that, the distinction ratio varies with different error occurrence rate in the network, but there is no significant sign to tell which type of errors could be better discriminated in the data with a complex event pattern. The performance of data discrimination largely depends on the relative occurrence time and loca- tion of errors and events. For example, in the test case, when a continuous error occurs next to the event samples, the processing tends to misjudge such erroneous samples. Meanwhile, if most of the neighboring nodes are gener- ating error samples, it is difficult for the fusion center to report correct discrimination results. 4.2. Real-Sensed Data Experiment Our experiment aims at testing the performance on the discrimination of durative event samples. The experi- ment is carried out based on the sensor data collected by the Intel Berkeley Research Lab [15], where we select the data generated from a subset of the sensor nodes and inject errors and events to the raw data to evaluate the Copyright © 2010 SciRes. WSN  X. N. CUI ET AL. 290 performance of the distinction framework. The experi- ment includes three steps, corresponding to the process- ing of the node, neighbor and cluster levels, respectively. Without loss of generality, both the error probability of a sample and the event pattern are unknown to a sensor node. The parameters used in the experiment are listed in Table 4. The discrimination metrics in Table 4 are tested for the sample prediction in Step 1 and the event discrimina- tion of Steps 2 and 3. Figure 11 shows the accuracy comparison of these metrics according to the experiment on four nearby nodes (notes 1, 2, 3, and 33 in [15]) with about 2000 temperature samples per node. Due to the miss-sampling and over-sampling cases, the integrated raw data have 2787 samples. The discrimination metrics are calculated by sliding window. The correlation coeffi- cient is shown as the best metric because of its stable performance over both little-changed samples (e.g., the samples during time intervals [2989, 3633], [4740, 5566]) and fast response over dynamically changed samples (e.g., the samples during time interval [3689, 3904]). Figure 10. The comparison of distinction ratios. Table 4. Parameter configuration of the experiment. Parameters General parameters Data amount: 200 temperature samples per node with error/event injection; Error occurrence frequency ≤ 50%; Event occurrence frequency ≤ 1%; Error/Event value range: [-30, 100]. Step 1 (node level) Window length: 40 samples; Sliding ratio: 50%. Step 2 (neighbor level) Average number of 1-hop neighbors: 3 Step 3 (cluster level) Average fusion range: 10 nearby nodes Discrimination metr i c s Correlation coefficient, mean absolute error, root mean squared error, relative absolute error and root relative squared error. Evaluation metrics r1-mistaking errors for ordinary samples; r2-mistaking errors for events; r3-mistaking ordinary readings for events; r4-mistaking ordinary readings for errors; r5-mistaking events for ordinary samples; r6-mistaking events for errors; r7-correct distinction of events, errors, and ordinary samples; r1 + r2 + r3 + r4 + r5 + r6 + r7 = 1; False Alarm = r2 + r3; Miss Hit = r5 + r6. However, the other metrics are more or less inaccurate over part of the samples. For example, except for the correlation coefficient, all of the other four metrics show fluctuations during time interval [5063, 5154] while the raw samples do not change much during this time period. Therefore, correlation coefficient is used to express the value difference between the predicted and the real- sensed samples. The performance of the discrimination framework is evaluated in different cases of error occurrence rate in the network. The ratio r7 reflects how many samples are correctly judged in each step over all of the samples. As shown in Figure 12, r7 decreases with the increase of error occurrence rate in Steps 1 and 2, but Step 3 has corrected most of the wrong discriminations and kept the ratio as high as 97% in all of the five cases. Meanwhile, Figure 13 shows that, in different cases of the network, the step-wise processing has always kept an increasing Figure 11. The comparison of different distinction metrics. Figure 12. The comparison of different steps in processing. Figure 13. The comparison of different error occurrence frequency. Copyright © 2010 SciRes. WSN  X. N. CUI ET AL.291 trend of the correct distinction (i.e., r7), demonstrating the robustness of the discrimination framework. Besides the ratio of correct distinction, the ratios of false alarm and miss hit have been analyzed in Figure 14. Although the false alarm is relatively high in the first step, the processing of the following two steps can sig- nificantly reduce the ratio of false alarm. The average false-alarm rates after each step are 9%, 0.6% and 0.5%. On the other hand, the average miss-hit rates after each step are 0.5%, 0.8% and 0.6%. There is slight increase of miss-hit rate after Steps 2 and 3. This is because new errors would be incurred by the cross-comparison and ranking among samples from different nodes. Thus, tradeoffs exist between the false-alarm rate and miss-hit rate in the discrimination framework. More specifically, there are usually higher false-alarm rates in the solutions to event-detection problems since they mistake erroneous samples for event samples. On the other hand, the approaches of traditional anom- aly-detection problems often mistake event samples for erroneous samples and result in higher miss-hit rates. Figure 15 and Figure 16 compare the false-alarm rate Figure 14. Statistical result of false alarm and miss hit. Figure 15. Comparison of false-alarm rate. Figure 16. Comparison of miss-hit rate. and miss-hit rate of the discrimination framework for DEE problem with the corresponding methods in event detection and anomaly detection, respectively. It is ob- vious that the discrimination framework in our work has significantly outperformed the traditional event-detection method in false-alarm rate, and the miss-hit rate of the discrimination framework is much lower than that of the traditional anomaly-detection framework. 5. Conclusions and Future Work Different from the traditional event detection and anom- aly detection problems, in this article, we have presented the problem of data discrimination to separate sensor data into the subsets of error samples, event samples and ordinary samples. A multi-level processing framework has been devised in view of the characteristics and con- straints of sensor nodes, as well as the requirement of discrimination correctness and response time. Both the scenario-based simulations and the experiment based on real-sensed data have been carried out to evaluate the performance of the discrimination framework. The simulation and experimental results show that different types of monitored events need different kinds of data-discrimination methods and different level of data processing. For example, the correlation coefficient serves as the most appropriate distinction metric in the sample discrimination of durative events. According to the comparison results of false-alarm and miss-hit rate of the methods for traditional event-detection and anom- aly-detection problems, the multi-level processing frame- work has significantly increased the correct distinction ratio, substantially reduced the false-alarm rate, and kept the miss-hit rate in an acceptable low level. In the future, we plan to apply such a framework to more specific event monitoring problems in fault-prone sensor networks. It is believed that good performance of data discrimination comes from wise use of the do- main-knowledge of the event patterns and error patterns as well as the characteristics of wireless sensor networks. 6. References [1] D. Shepherd and S. Kumar, “Microsensor Applications,” In: S. S. Iyengar and R. R. Brooks Eds., Distributed Sen- sor Networks, Chapman & Hall/CRC Press, 2005, pp. 11-27. [2] P. Buonadonna, D. Gay, J. M. Hellerstein, W. Hong and S. Madden, “TASK: Sensor Network in a Box,” Techni- cal Report, International Research Berkeley, January 2005. [3] Y. Zhang, M. Nirvana and H. Paul. “Why General Outlier Detection Techniques Do Not Suffice for Wireless Sensor Networks?” Intelligent Techniques for Warehousing and Mining Sensor Network Data, IGI Global, 2009. [4] B. Sheng, Q. Li, W. Z. Mao and W. Jin. “Outlier Detec- tion in Sensor Networks,” Proceedings of the ACM Inter- Copyright © 2010 SciRes. WSN  X. N. CUI ET AL. Copyright © 2010 SciRes. WSN 292 national Symposium on Mobile Ad Hoc Networking and Computing, Montreal, September 2007, pp. 219-228. [5] T. Palpanas, D. Papadopoulos, V. Kalogeraki and D. Gunopulos, “Distributed Deviation Detection in Sensor Networks,” SIGMOD Record, Vol. 32, No. 4, December 2003, pp. 77-82. [6] S. Subramaniam, T. Palpanas, D. Papadopoulos, V. Ka- logeraki and D. Gunopulos, “Online Outlier Detection in Sensor Data Using Non-Parametric Models,” Proceed- ings of Very Large Data Bases, Seoul, 12-15 September 2006, pp. 187-198. [7] J. W. Branch, C. Giannella, B. Szymanski, R. Wolff and H. Kargupta. “In-network Outlier Detection in Wireless Sensor Networks,” Proceedings of 26th International Conference on Distributed Computing Systems, Lisboa, 4-7 July 2006. [8] M. E. Otey, A. Ghoting and S. Parthasarathy. “Fast Dis- tributed Outlier Detection in Mixed-Attribute Data Sets,” International Journal of Data Mining and Knowledge Discovery, Vol. 12, No. 2-3, 2006, pp. 203-228. [9] D. Janakiram, V. Reddy and A. Kumar, “Outlier Detec- tion in Wireless Sensor Networks Using Bayesian Belief Networks,” 1st International Conference on Communica- tion System Software and Middleware, New Delhi, 2006, pp. 1-6. [10] C. Franke and M. Gertz, “ORDEN: Outlier Region De- tection and Exploration in Sensor Networks,” Proceed- ings of ACM Special Interest Group on Management of Data, Providence, 29 June-2 July 2009. [11] M. Ding, D. C. Chen, K. Xing and X. Z. Cheng. “Local- ized Fault-Tolerant Event Boundary Detection in Sensor Networks,” Proceedings of 24th Annual Joint Conference of the IEEE Computer and Communications Societies, Vol. 2, 13-17 March 2005, pp. 902-913. [12] V. Chandola, A. Banerjee and V. Kumar, “Anomaly De- tection: A Survey,” ACM Computing Surveys, September 2009, pp. 1-72. [13] K. Ni, N. Ramanathan, M. N. H. Chehade, L. Balzano, S. Nair, S. Zahedi, E. Kohler, G. Pottie, M. Hansen and M. Srivastava, “Sensor Network Data Fault Types,” ACM Transactions on Sensor Networks, Vol. 5, No. 3, May 2009. [14] M. M. Kokar, J. A. Tomasik and J. Weyman, “Data vs. Decision Fusion in the Category Theory Framework,” Proceedings of Fusion 4th International Conference on Information Fusion, Vol. 1, 2001. [15] http://db.csail.mit.edu/labdata/labdata.html |