J. Biomedical Science and Engineering, 2010, 3, 327-329
doi:10.4236/jbise.2010.33045 Published Online March 2010 (http://www.SciRP.org/journal/jbise/
JBiSE
).
Published Online March 2010 in SciRes. http://www.scirp.org/journal/jbise
Modelling of bionic arm
Amartya Ganguly
Department of Biomedical Engineering, JIS College of Engineering; Block ‘A’, Phase III, Kalyani, Nadia, India.
Email: ganguly.amartya@yahoo.in
Received 11 December 2009; revised 25 December 2009; accepted 29 December 2009.
ABSTRACT
The bionic arm is a prosthesis which will allow the
amputees to control it with the help of their own
brain instead of depending upon the mechanical
functions of the artificial limbs which are at present
available in the market. A complex design of control
systems is embedded in the bionic arm which will
receive and analyze the signals from the brain and
convert the electrical energy to mechanical energy,
making the bionic arm move.
Keywords: Neural Network; Bionic, Amputation;
Upper Limb
1. INTRODUCTION
Bionic arm is a revolutionary idea for amputees across
the globe. This is as close as we can get to our natural
limb. The fundamental point is to make the arm move
with our brain unlike previous prosthetic upper limbs. In
the case of bionic arm we take the nerve conduction sig-
nals from the brain and amplify it so that we can register
the signal and convert that electrical signal into me-
chanical energy so as to move the mechanical device i.e.
the arm. Prosthesis is being used and constantly being
perfected to suit human needs. Various types of prosthe-
sis have been made to suit many actions but not all. But
the bionic arm will be able to perform all kinds of
movements of the human upper limb even the most dif-
ficult actions like unscrewing the cap of bottle or picking
up a coin from the ground. This arm will also be able to
judge the correct pressure required for any movement.
2. METHODS
The electrodes placed near the chest region will detect
the strongest of the nerve impulses from the brain which
is then fed to the biopotential amplifier to amplify the
signals. The amplified signals are then routed to the
transducer to convert this electrical energy to mechanical
energy enabling the bionic arm to move as per the
strength of the signal. This can be further explained by
mathematics as given below.
This here is a mathematical model in order to simulate
the function of the brain. For this purpose the NARMA
L2 Controller has been used. To put it more generally
neural networks have been used [1].
2.1. Model Components
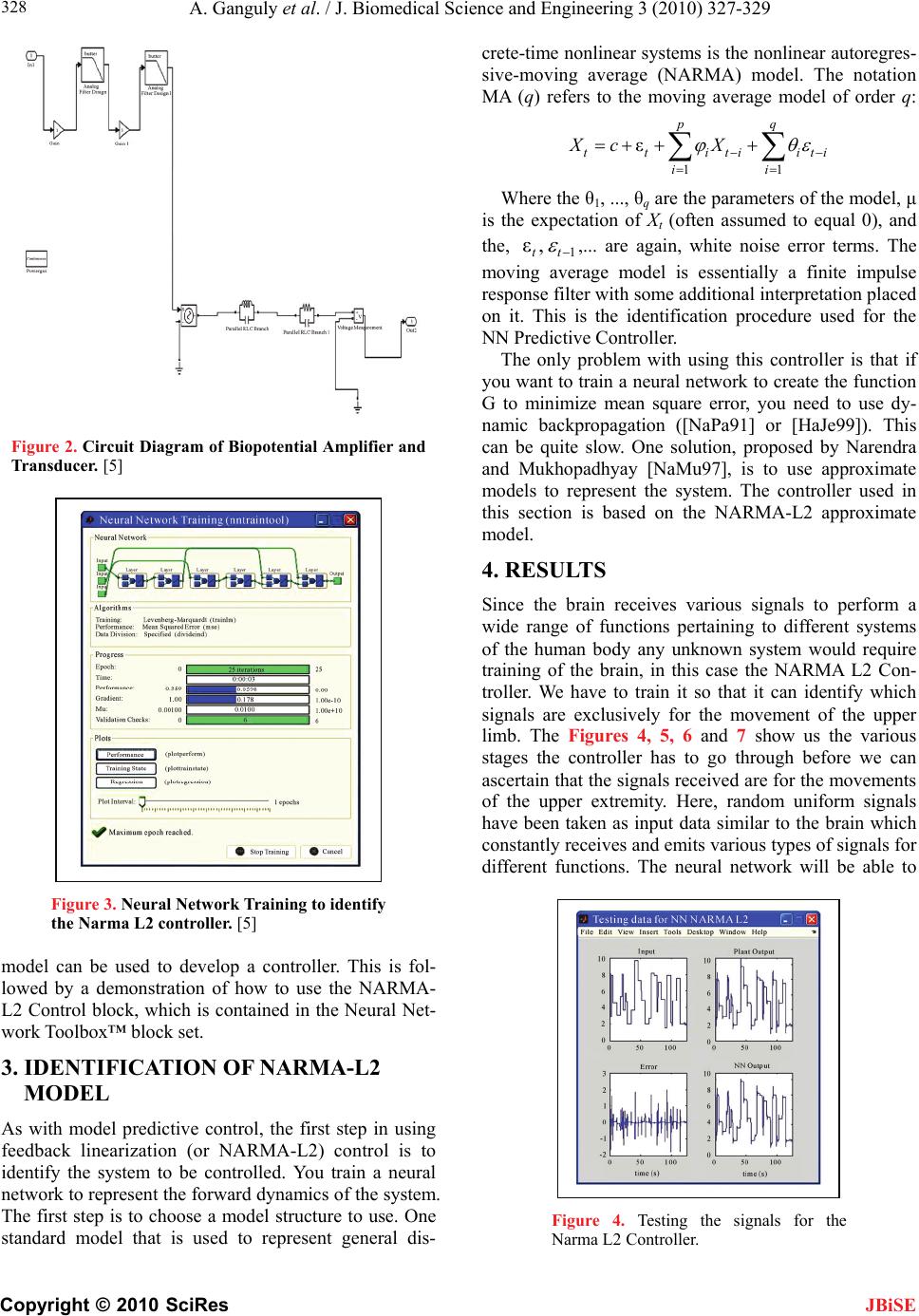
The Figure 1 above shows the arrangement of the circuit
components of the Model of Bionic Arm. [2,3]The uni-
form random signal goes to the brain that is the Narma
L2 Controller which goes to the subsystem of bionic arm
which consists of the biopotential amplifier and the
transducer, Figure 2 shown below. The graphical result
is viewed in the scope.
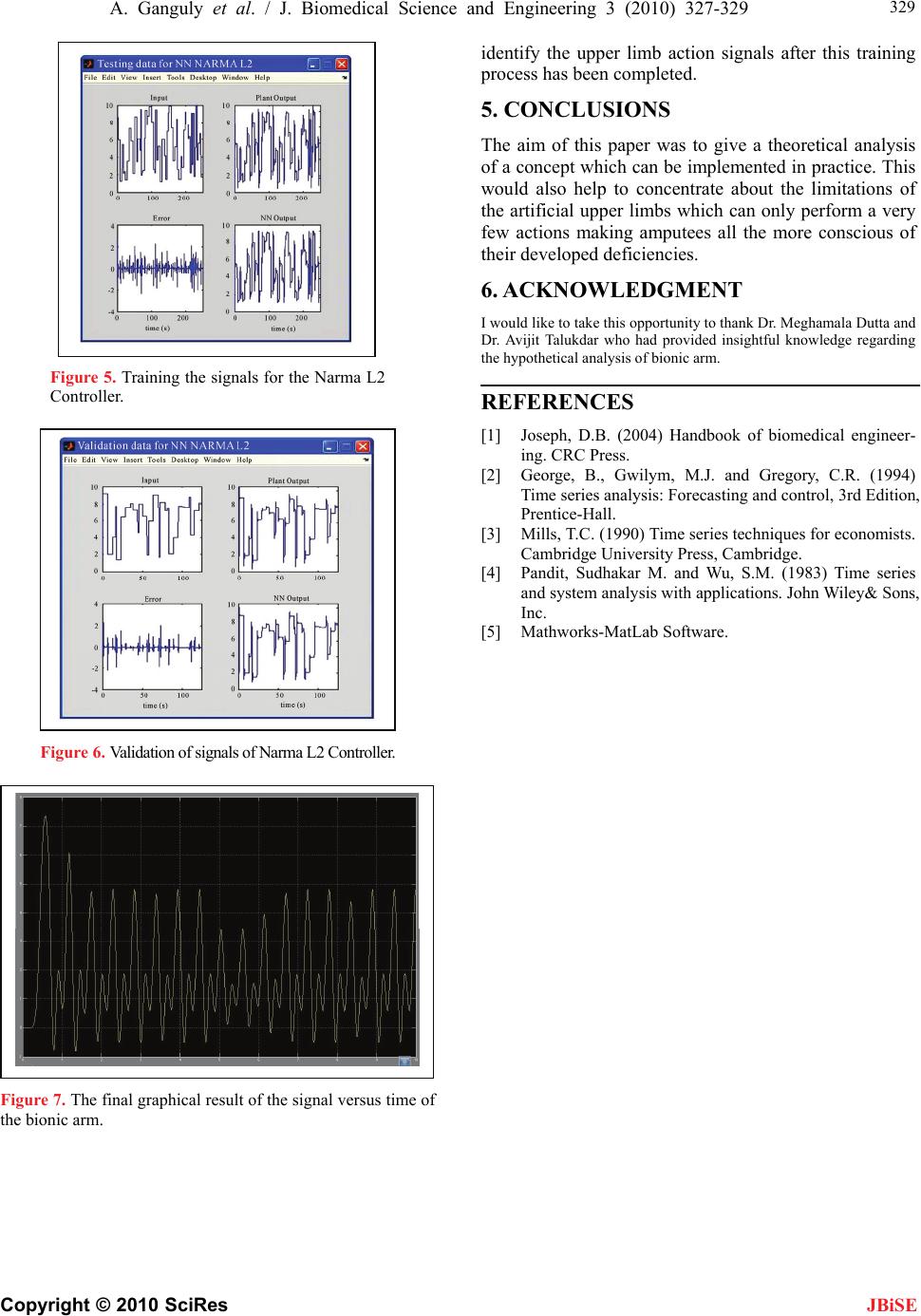
2.2. Narma L2 Controller
[4]The neurocontroller described in this section is re-
ferred to by two different names: feedback linearization
control and NARMA-L2 control. It is referred to as
feedback linearization when the plant model has a par-
ticular form (companion form). It is referred to as
NARMA-L2 control when the plant model can be ap-
proximated by the same form. The central idea of this
type of control is to transform nonlinear system dynam-
ics into linear dynamics by canceling the nonlinearities.
Figure 3 represents the training to identify the Narma
L2 controller. This section begins by presenting the
companion form system model and demonstrating how
you can use a neural network to identify this model.
Then it describes how the identified neural network
Figure 1. Block diagram of bionic arm. [5]