Applied Mathematics
Vol.3 No.10A(2012), Article ID:24109,17 pages DOI:10.4236/am.2012.330190
On the Stable Sequential Kuhn-Tucker Theorem and Its Applications*
Mathematical Department, Nizhnii Novgorod State University, Nizhnii Novgorod, Russia
Email: m.sumin@mm.unn.ru, m.sumin@mail.ru
Received July 2, 2012; revised August 2, 2012; accepted August 9, 2012
Keywords: Sequential Optimization; Minimizing Sequence; Stable Kuhn-Tucker Theorem in Nondifferential Form; Convex Programming; Duality; Regularization; Optimal Control; Inverse Problems
ABSTRACT
The Kuhn-Tucker theorem in nondifferential form is a well-known classical optimality criterion for a convex programming problems which is true for a convex problem in the case when a Kuhn-Tucker vector exists. It is natural to extract two features connected with the classical theorem. The first of them consists in its possible “impracticability” (the Kuhn-Tucker vector does not exist). The second feature is connected with possible “instability” of the classical theorem with respect to the errors in the initial data. The article deals with the so-called regularized Kuhn-Tucker theorem in nondifferential sequential form which contains its classical analogue. A proof of the regularized theorem is based on the dual regularization method. This theorem is an assertion without regularity assumptions in terms of minimizing sequences about possibility of approximation of the solution of the convex programming problem by minimizers of its regular Lagrangian, that are constructively generated by means of the dual regularization method. The major distinctive property of the regularized Kuhn-Tucker theorem consists that it is free from two lacks of its classical analogue specified above. The last circumstance opens possibilities of its application for solving various ill-posed problems of optimization, optimal control, inverse problems.
1. Introduction
We consider the convex programming problem
(P) 

where  is a convex continuous functional,
is a convex continuous functional,  is a linear continuous operator,
is a linear continuous operator,  is a fixed element,
is a fixed element,  ,
,  , are convex functionals, D is a convex closed set, and Z and H are Hilbert spaces. It is well-known that the Kuhn-Tucker theorem in nondifferential form (e.g. see [1-3]) is the classical optimality criterion for Problem (P). This theorem is true if Problem (P) has a Kuhn-Tucker vector. It is stated in terms of the solution to the convex programming problem, the corresponding Lagrange multiplier, and the regular Lagrangian of the optimization problem (here, “regular” means that the Lagrange multiplier for the objective functional is unity).
, are convex functionals, D is a convex closed set, and Z and H are Hilbert spaces. It is well-known that the Kuhn-Tucker theorem in nondifferential form (e.g. see [1-3]) is the classical optimality criterion for Problem (P). This theorem is true if Problem (P) has a Kuhn-Tucker vector. It is stated in terms of the solution to the convex programming problem, the corresponding Lagrange multiplier, and the regular Lagrangian of the optimization problem (here, “regular” means that the Lagrange multiplier for the objective functional is unity).
Note two fundamental features of the classical Kuhn-Tucker theorem in nondifferential form (e.g. see [4-7]). The first feature is that this theorem is far from being always “correct”. If the regularity of the problem is not assumed, then, in general, the classical theorem does not hold even for the simplest finite-dimensional convex programming problems. In particular, the corresponding one-dimensional example can be found in [7] (see Example 1 in [7]). For convex programming problems with infinitedimensional constraints, the nonvalidity of this classical theorem can be regarded as their characteristic property. In this case a simple meaningful example can be found in [7] (see Example 2 in [7]) also.
The second important feature of the classical KuhnTucker theorem is its instability with respect to perturbations of the initial data. This instability occurs even for the simplest finite-dimensional convex programming problems. The following problem can be a particular example.
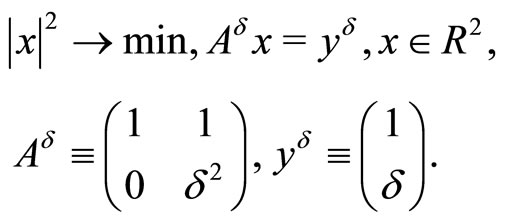
Example 1.1. Consider the minimization of a strongly convex quadratic function of two variables on a set specified by an affine equality constraint:
 (1)
(1)
The exact normal solution is . The dual problem for (1) has the form
. The dual problem for (1) has the form
where 
and  .
.
Its solutions are the vectors . It is easy to verify that every vector of this form is a Kuhn-Tucker vector of problem (1). For
. It is easy to verify that every vector of this form is a Kuhn-Tucker vector of problem (1). For  consider the following perturbation of problem (1)
consider the following perturbation of problem (1)
 (2)
(2)
The corresponding dual problem

has the solution .
.
According to the classical Kuhn-Tucker theorem, the vector

is a solution to perturbed problem (2). At the same time, this vector is an “approximate” solution to original system (1), and no convergence to the unique exact solution occurs as .
.
It is natural to consider the above-mentioned features of the classical Kuhn-Tucker theorem in nondifferential form as a consequence of the classical approach long adopted in optimization theory. According to this approach, optimality conditions are traditionally written in terms of optimal elements. At the same time, it is well-known that optimization problems and their duals are typically unsolvable. The mentioned above examples from [7] show that the unsolvability of dual problems fully reveals itself even in very simple (at first glance) convex programming problems. On the one hand, optimality conditions for such problems cannot be written in terms of optimal elements. On the other hand, even if they can, the optimal elements in these problems are unstable with respect to the errors in the initial data, which is demonstrated by Example 1.1. This fact is a fundamental obstacle preventing the application of the classical optimality conditions to solving practical problems. An effective way of overcoming the two indicated features of the classical Kuhn-Tucker theorem (which can also be regarded as shortcomings of the classical approach based on the conventional concept of optimality) is to replace the language of optimal elements with that of minimizing sequences that is sequential language. In many cases this replacement fundamentally changes the situation: the theorems become more general, absorb the former formulations, and provide an effective tool for solving practical problems.
So-called regularized Kuhn-Tucker theorem in nondifferential sequential form was proved for Problem (P) with strongly convex objective functional and with parameters in constraints in [7]. This theorem is an assertion in terms of minimizing sequences (more precisely, in terms of minimizing approximate solutions in the sense of J. Warga) about possibility of approximation of the solution of the problem by minimizers of its regular Lagrangian without any regularity assumptions. It contains its classical analogue and its proof is based on the dual regularization method (see, e.g. [4-7]). The specified above minimizers are constructively generated by means of this dual regularization method. A crucially important advantage of these approximations compared to classical optimal Kuhn-Tucker points (see Example 1.1.) is that the former are stable with respect to the errors in the initial data. This stability makes it possible to effectively use the regularized Kuhn-Tucker theorem for practically solving a broad class of ill-posed problems in optimization and optimal control, operator equations of the first kind, and various inverse problems.
In contrast to [7], in this article we prove the regularized Kuhn-Tucker theorem in nondifferential sequential form for nonparametric Problem (P) in case the objective functional is only convex and the set D is bounded. Just as in [7], its proof is based on the dual regularization method. Simultaneously, the dual regularization method is modified here to prove the regularized Kuhn-Tucker theorem in the case of convex objective functional.
This article consists of an introduction and four main sections. In Section 2 the convex programming problem in a Hilbert space is formulated. Section 3 contains the formulation of the convergence theorem of dual regularization method for the case of a strongly convex objective functional including its iterated form and the proof of the analogous theorem when the objective functional is only convex. In turn, in Section 4 we give the formulation of the stable sequential Kuhn-Tucker theorem for the case of a strongly convex objective functional. Besides, here we prove the theorem for the same case but in iterated form and in the case of the convex objective functional also. Finally, in Section 5 we discuss possible applications of the stable sequential Kuhn-Tucker theorem in optimal control and in ill-posed inverse problems.
2. Problem Statement
Consider the convex programming Problem (P) and suppose that it is solvable. Its solutions we denote by . We also assume that
. We also assume that

where  is a constant and
is a constant and
 .
.
Below we use the notations:


Define the concave dual functional called the value functional

and the dual problem
 (3)
(3)
In what follows the concept of a minimizing approximate solution to Problem (P) plays an important role. Recall that a sequence ,
,  , is called a minimizing approximate solution to Problem (P) if
, is called a minimizing approximate solution to Problem (P) if , for
, for , and
, and . Here
. Here  is the generalized infimum:
is the generalized infimum:

If f is a strongly convex functional and also if D is a bounded set,  can be written as
can be written as

Recall that in this case the Kuhn-Tucker vector of Problem (P) is a pair  such that
such that
where  is a solution to (P). It is well-known that every such Kuhn-Tucker vector
is a solution to (P). It is well-known that every such Kuhn-Tucker vector  is the same as a solution to the dual problem (3), and combined with
is the same as a solution to the dual problem (3), and combined with  constitutes a saddle point of the Lagrangian
constitutes a saddle point of the Lagrangian
 .
.
3. Dual Regularization Algorithm
In this section we consider dual regularization algorithm for solving Problem (P) which is a stable with respect to perturbations of its input data.
3.1. The Original and Perturbed Problems
Let F be the set formed of all collections of initial data  for Problem (P). Each collection consists of a functional f, which is continuous and convex on D, of a linear continuous operator A, an element h and functionals
for Problem (P). Each collection consists of a functional f, which is continuous and convex on D, of a linear continuous operator A, an element h and functionals , that are continuous and convex on D. Moreover, it holds that
, that are continuous and convex on D. Moreover, it holds that



where the constant LM is independent of the collection. If the objective functional of Problem (P) is strongly convex, then a functional f in each collection is continuous and strongly convex on D and has the constant of strong convexity  that is independent of the collection.
that is independent of the collection.
Furthermore, we define collections  and
and  of unperturbed and perturbed data, respectively:
of unperturbed and perturbed data, respectively:

and  where
where  characterizes the error in initial data and
characterizes the error in initial data and  is a fixed scalar. Assume that
is a fixed scalar. Assume that

 (4)
(4)
where  is independent of
is independent of  and
and
 .
.
Denote by (P0) Problem (P) with the collection  of unperturbed initial data. Assume that (P0) is a solvable problem. Since
of unperturbed initial data. Assume that (P0) is a solvable problem. Since

is a convex and closed set, we denote the unique solution of Problem (P0) in the case of strongly convex  by
by . The same notation we leave for solutions of Problem (P0) in the case of convex
. The same notation we leave for solutions of Problem (P0) in the case of convex  also.
also.
The construction of the dual algorithm for Problem (P0) relies heavily on the concept of a minimizing approximate solution in the sense of J. Warga [8]. Recall that a minimizing approximate solution for this problem is a sequence , such that
, such that
 where
where  and nonnegative scalar sequences
and nonnegative scalar sequences ,
,  , converge to zero. Here
, converge to zero. Here  is the generalized infimum for Problem (P0) defined in Section 2, and
is the generalized infimum for Problem (P0) defined in Section 2, and
 .
.
It is obvious that, in general , where
, where  is the classical value of the problem. However, for Problem (P0) defined above, we have
is the classical value of the problem. However, for Problem (P0) defined above, we have . Also, we can assert that every minimizing approximate solution
. Also, we can assert that every minimizing approximate solution  of Problem (P0) obeys the limit relation
of Problem (P0) obeys the limit relation
both in the case of convex  and in the case of strongly convex
and in the case of strongly convex .
.
Since the initial data are given approximately, instead of (P0) we have the family of problems

depending on the “error” .
.
Define the Lagrange functional
and the concave dual functional (value functional)

If the functional f is strongly convex, then due to strong convexity of the continuous Lagrange functional , for all
, for all , where
, where
 the value
the value  is attained at a unique element
is attained at a unique element .
.
If D is a bounded set, then obviously the dual functional  is defined and finite for all elements
is defined and finite for all elements . When the functional f is convex, in the last case the value
. When the functional f is convex, in the last case the value  is attained at elements of the non-empty set
is attained at elements of the non-empty set
 .
.
Denote by  the unique point that furnishes the maximum to the functional
the unique point that furnishes the maximum to the functional

on the set .
.
Assume that the consistency condition
 (5)
(5)
is fulfilled.
3.2. Dual Regularization in the Case of a Strongly Convex Objective Functional
In this subsection we formulate the convergence theorem of dual regularization method for the case of strongly convex objective functional of Problem (P0). The proof of this theorem can be found in [7].
Theorem 3.1. Let the objective functional of Problem (P) is strongly convex and the consistency condition (5) be fulfilled. Then, regardless of whether or not the Kuhn-Tucker vector of Problem (P0) exists, it holds that





Along with the above relations, it holds that

and, as a consequence,
 (6)
(6)
If the dual problem is solvable, then it also holds that

where  is the solution to the dual problem with minimal norm.
is the solution to the dual problem with minimal norm.
If the strongly convex functional  is subdifferentiable
is subdifferentiable  in the sense of convex analysis
in the sense of convex analysis on the set D, then it also holds that
on the set D, then it also holds that

In other words, regardless of whether or not the dual problem is solvable, the regularized dual algorithm is regularizing one in the sense of [9].
3.3. Iterative Dual Regularization in the Case of a Strongly Convex Objective Functional
In this subsection we formulate the convergence theorem of iterative dual regularization method for the case of strongly convex objective functional of Problem (P0). It is convenient for practical solving similar problems. The proof of this theorem can be found in [4].
We suppose here, that the set D is bounded and use the notation
 where
where
is the sequence generated by dual regularization algorithm of Theorem 3.1. in the case ,
, . Here
. Here  is an arbitrary sequence of positive numbers converging to zero. Suppose that the sequence
is an arbitrary sequence of positive numbers converging to zero. Suppose that the sequence  is constructed according to the iterated rule
is constructed according to the iterated rule
 (7)
(7)
where ,
,

and the sequences ,
,  , obey the consistency conditions
, obey the consistency conditions
 (8)
(8)

The existence of sequences  and
and ,
,  , satisfying relations (8) is easy to verify. For example, we can use
, satisfying relations (8) is easy to verify. For example, we can use  and
and .
.
Then, as it is shown in [4], the limit relations
 (9)
(9)
hold and, as consequence, we have
 (10)
(10)


Besides, if the strongly convex functional  is subdifferentiable at the points of the set D, then we have also
is subdifferentiable at the points of the set D, then we have also

The specified circumstances allow us to transform Theorem 3.1. into the following statement.
Theorem 3.2. Let the objective functional of Problem (P0) is strongly convex, the set D is bounded and the consistency conditions (8) be fulfilled. Then, regardless of whether or not the Kuhn-Tucker vector of Problem (P0) exists, it holds that



Along with the above relations, it holds that

and, as a consequence,

If the dual problem is solvable, then it also holds that

where  is the solution to the dual problem with minimal norm.
is the solution to the dual problem with minimal norm.
If the strongly convex functional  is subdifferentiable (in the sense of convex analysis) on the set D, then it also holds that
is subdifferentiable (in the sense of convex analysis) on the set D, then it also holds that

3.4. Dual Regularization in the Case of a Convex Objective Functional
In this subsection we prove the convergence theorem of dual regularization method for the case of bounded D and convex objective functional of Problem (P0).
Below, an important role is played by the following lemma, which provides an expression for the superdifferential of concave value function ,
,  in the case of a convex objective functional and a bounded set D. Here, the superdifferential of a concave function (in the sense of convex analysis)
in the case of a convex objective functional and a bounded set D. Here, the superdifferential of a concave function (in the sense of convex analysis)  is understood as the subdifferential of the convex functional
is understood as the subdifferential of the convex functional  taken with an opposite sign. The proof is omitted, since it can be found for a more general case in [4].
taken with an opposite sign. The proof is omitted, since it can be found for a more general case in [4].
Lemma 3.1. The superdifferential (in the sense of convex analysis of the concave functional
of the concave functional  at a point
at a point  is expressed by the formula
is expressed by the formula
where  is the generalized Clarke gradient of
is the generalized Clarke gradient of  at
at , and the limit
, and the limit  is understood in the sense of weak convergence in
is understood in the sense of weak convergence in .
.
Further, first of all we can write the inequality
for an element
 .
.
Then, taking into account Lemma 3.1. we obtain
 (11)
(11)

where  is such sequence that
is such sequence that
Suppose without loss of generality that the sequence  converges weakly, as
converges weakly, as , to an element
, to an element  belonging obviously to the set
belonging obviously to the set
Due to weak lower semicontinuity of the convex continuous functionals  and boundedness of D we obtain from (11) the following inequality
and boundedness of D we obtain from (11) the following inequality
where  is some subsequence of the sequence
is some subsequence of the sequence .
.
To justify this inequality we have to note that in the case  for some k the limit relation
for some k the limit relation
holds despite the fact that the sequence  converges only weakly to
converges only weakly to . This circumstance is explained by specific of Lagrangian (it is the weighed sum of functionals) and the fact that the sequence
. This circumstance is explained by specific of Lagrangian (it is the weighed sum of functionals) and the fact that the sequence  is a minimizing one for it.
is a minimizing one for it.
As consequence of the last inequality, we obtain
 (12)
(12)
 (13)
(13)

 (14)
(14)
In turn, the limit relations (12)-(14) and boundedness of D lead to the equality
 (15)
(15)
Further, we can write for any

the following inequalities
From here, due to the estimates (4), we obtain
or

or
or
or, because of the equality (15)
or
From the last estimate it follows that
where
 .
.
Thus, we derive the following limit relations
 (16)
(16)
The limit relations (12)-(14), (16) give the possibility to write
 (17)
(17)
Further, let us denote by
any weak limit point of the sequence
 ,
, .
.
Then, because of the limit relations (17) and the obvious inequality
we obtain
and, as consequence, due to boundedness of D

Simultaneously, since

and the inequality
holds, we can write for any  due to the limit relation (15)
due to the limit relation (15)
From the last limit relation, the consistency condition (5), the estimate (4) and boundedness of D we obtain
or
Thus, due to boundedness of D and weak lower semicontinuity of  we constructed the family of depending on
we constructed the family of depending on  elements
elements  such that
such that

and simultaneously

where any weak limit point of any sequence  , is obviously a solution of Problem (P0).
, is obviously a solution of Problem (P0).
Along with the construction of a minimizing sequence for the original Problem (P0), the dual algorithm under discussion produces a maximizing sequence for the corresponding dual problem. We show that the family

is the maximizing one for the dual problem, i.e. the limit relation
 (18)
(18)
holds.
First of all, note that due to boundedness of D the evident estimate
 (19)
(19)
is true with a constant  which depends on
which depends on
but not depends on .
.
Since

we can write, thanks to (19), the estimates
whence we obtain
From here, we deduce, due to the consistency condition (5) and limit relations (16), that for any fixed  and for any fixed
and for any fixed  there exists such
there exists such  for which the estimate
for which the estimate
 (20)
(20)
holds.
Let us, suppose now that the limit relation (18) is not true. Then there exists such convergent to zero a sequence  that the inequality
that the inequality
is fulfilled for some .
.
Since

for , we deduce from the last estimate that for all sufficiently large positive M the inequality
, we deduce from the last estimate that for all sufficiently large positive M the inequality
takes a place. This estimate contradicts to obtained above estimate (20). The last contradiction proves correctness of the limit relation (18).
At last, we can assert that the duality relation
 (21)
(21)
for Problem (P0) holds. Indeed, similar duality relation is valid due to Theorem 3.1. (see relation (6)) for the problem
 ,
,  with strongly convex objective functional. Writing this duality relation and passing to the limit as
with strongly convex objective functional. Writing this duality relation and passing to the limit as  we get because of boundedness of D the duality relation (21).
we get because of boundedness of D the duality relation (21).
In turn, from the duality relation (21), the estimate (19) and the limit relation (18) we deduce the limit relation

So, as a result of this subsection, the following theorem holds. To formulate it, introduce beforehand the notations


Theorem 3.3. Let the objective functional of Problem (P0) is convex and the consistency condition (5) be fulfilled. Then, regardless of whether or not the Kuhn-Tucker vector of Problem (P0) exists, it holds for some
that
 (22)
(22)



Along with the above relations, it holds that
 (23)
(23)
If the dual problem is solvable, then it also holds that

where 
is the solution to the dual problem with minimal norm.
4. The Stable Sequential Kuhn-Tucker Theorem
At first, in this section we give the formulation of the stable sequential Kuhn-Tucker theorem for the case of strongly convex objective functional. Next we prove the corresponding theorem in a form of iterated process in the same case and, at last, prove the theorem in the case of the convex objective functional.
4.1. The Stable Kuhn-Tucker Theorem in the Case of a Strongly Convex Objective Functional
Below the formulation of the stable sequential KuhnTucker theorem for the case of strongly convex objective functional is given. The proof of this theorem can be found in [7].
Theorem 4.1. Assume that  is a continuous strongly convex subdifferentiable functional. For a bounded minimizing approximate solution to Problem (P0) to exist (and, hence, to converge strongly to
is a continuous strongly convex subdifferentiable functional. For a bounded minimizing approximate solution to Problem (P0) to exist (and, hence, to converge strongly to ), it is necessary that there exists a sequence of dual variables
), it is necessary that there exists a sequence of dual variables
 ,
,  such that
such that
 ,
,  the limit relations
the limit relations

 (24)
(24)
are fulfilled, and the sequence
is bounded. Moreover, the latter sequence is the desired minimizing approximate solution to Problem (P0); that is,
 .
.
At the same time, the limit relations

 (25)
(25)
are also valid; as a consequence,
 (26)
(26)
is fulfilled. The points , may be chosen as the points
, may be chosen as the points
 ,
, 
from Theorem 3.1. for , where
, where ,
,  .
.
Conversely, for a minimizing approximate solution to Problem (P0) to exist, it is sufficient that there exists a sequence of dual variables
 ,
, 
such that
 ,
, 
the limit relations (25) are fulfilled, and the sequence
is bounded. Moreover, the latter sequence is the desired minimizing approximate solution to Problem (P0); that is,
 .
.
If in addition the limit relations (25) are fulfilled, then (26) is also valid. Simultaneously, every weak limit point of the sequence

is a maximizer of the dual problem
 .
.
4.2. The Stable Kuhn-Tucker Theorem in a Form of Iterated Process in the Case of a Strongly Convex Objective Functional
In this subsection we prove the stable sequential KuhnTucker theorem in a form of iterated process for the case of strongly convex objective functional. Note that the regularizing stopping rule for this iterated process in the case when the input data of the optimization problem are specified with a fixed (finite) error  can be found in [4].
can be found in [4].
Theorem 4.2. Assume that the set D is bounded and f0: D → R1 is a continuous strongly convex subdifferentiable functional. For a minimizing approximate solution to Problem (P0) to exist  and, hence, to converge strongly to
and, hence, to converge strongly to
 , it is necessary that for the sequence of dual variables
, it is necessary that for the sequence of dual variables
 ,
,  ,
,
generated by iterated process (7) with the consistency conditions (8) the limit relations
 (27)
(27)
are fulfilled. In this case the sequence 
is the desired minimizing approximate solution to Problem (P0); that is,
 .
.
Simultaneously, the limit relation
 (28)
(28)
is fulfilled.
Conversely, for a minimizing approximate solution to Problem (P0) to exist, it is sufficient that for the sequence of dual variables
 ,
,  generated by iterated process (7) with the consistency conditions (8), the limit relations (P0) are fulfilled. Moreover, the sequence
generated by iterated process (7) with the consistency conditions (8), the limit relations (P0) are fulfilled. Moreover, the sequence
is the desired minimizing approximate solution to Problem (P0); that is,
 .
.
Simultaneously, the limit relation (28) is valid.
Proof. To prove the necessity we first observe that Problem (P0) is solvable because of the conditions on its input data and existence of minimizing approximate solution. Now, the limit relations (27), (28) of the present theorem follow from Theorem 3.2. Further, to prove the sufficiency, we first can observe that Problem (P0) is solvable in view of the inclusion
the boundedness of the sequence
and the conditions imposed on the initial data of Problem (P0). Hence due to asserted in Subsection 3.3 there exists the sequence

generated by dual regularization algorithm of Subsection 2.2 and, as consequence, the sequence
generated by iterated process (7) with the consistency conditions (8), obey the limit relations (9), (10) and (28). Thus, the sequence
is the desired minimizing approximate solution to Problem (P0).
4.3. The stable Kuhn-Tucker Theorem in the Case of a Convex Objective Functional
In this subsection we prove the stable sequential KuhnTucker theorem in the case of the convex objective functional.
Theorem 4.3. Assume that the set D is bounded and  is a continuous convex functional. For a minimizing approximate solution to problem (P0) to exist (and, hence, every its weak limit point belongs to Z*), it is necessary and sufficient that there exists a sequence of dual variables
is a continuous convex functional. For a minimizing approximate solution to problem (P0) to exist (and, hence, every its weak limit point belongs to Z*), it is necessary and sufficient that there exists a sequence of dual variables
 ,
, 
such that
 ,
, 
and the relations
 (29)
(29)
 (30)
(30)
hold for some elements
 .
.
Moreover, the sequence
 is the desired minimizing approximate solution, and every weak limit point of this sequence is a solution to Problem (P0). As a consequence of the limit relations (29), (30) the limit relation
is the desired minimizing approximate solution, and every weak limit point of this sequence is a solution to Problem (P0). As a consequence of the limit relations (29), (30) the limit relation
 (31)
(31)
holds. Simultaneously, every weak limit point of the sequence

is a maximizer of the dual problem
 .
.
Proof. To prove the necessity, we first observe that Problem (P0) is solvable, i.e. , because of the conditions on its input data and existence of minimizing approximate solutions. Now, the first two limit relations (29), (30) of the present theorem follow from Theorem 3.3. if
, because of the conditions on its input data and existence of minimizing approximate solutions. Now, the first two limit relations (29), (30) of the present theorem follow from Theorem 3.3. if  and
and  are chosen as the points
are chosen as the points
 ,
, 
and  respectively. Further, due to the estimate (19) and the limit relation
respectively. Further, due to the estimate (19) and the limit relation
 ,
, 
we have

Then, taking into account the equality (see (23))
the limit relation (30) and obtained limit relation

(see (22)) we can write
and, as consequence, the limit relation (31) is valid. So, we have shown that the limit relation (31) is a consequence of the limit relations (29), (30). Now, let the sequence

be bounded. Then, since the concave continuous functional V0 is weakly upper semicontinuous, every weak limit point of this sequence is a maximizer of the dual problem .
.
Now we prove the sufficiency. We first observe that the set
is nonempty in view of the inclusion
the boundedness of the sequence
and the conditions imposed on the initial data of Problem (P0). Hence, problem (P0) is solvable. Furthermore, since the point  is a minimizer of the Lagrange functional
is a minimizer of the Lagrange functional , we can write
, we can write
By the hypotheses of the theorem, this implies that
We set  in this inequality and use the consistency condition
in this inequality and use the consistency condition
 ,
, 
to obtain
 ,
, .
.
In addition we have
 .
.
Using the classical properties of the weak compactness of a convex closed bounded set and the weak lower semicontinuity of a convex continuous functional, we easily deduce from the above facts that

i.e. the sequence
is a minimizing approximate solution of Problem (P0).
5. Possible Applications of the Stable Sequential Kuhn-Tucker Theorem
Below in this section we consider two illustrative examples connected with possible applications of the results obtained in the previous sections. Its main purpose is to show principal possibilities of using various variants of the stable sequential Kuhn-Tucker theorem for solving optimal control and inverse problems.
5.1. Application in Optimal Control
First of all we consider the optimal control problem with fixed time and with functional equality and inequality constraints





Here and below,  is a number characterising an error of initial data,
is a number characterising an error of initial data,  is a fixed number,
is a fixed number, 
is a convex functional,

are convex functionals,
 ,
,

are Lebesgue measurable and uniformly bounded with respect to  matrices,
matrices,

are Lebesgue measurable and uniformly bounded with respect to  vectors,
vectors,
 ,
,
 is a convex compact set,
is a convex compact set,  is a solution to the Cauchy problem
is a solution to the Cauchy problem

Obviously, for each control  this Cauchy problem has a unique solution
this Cauchy problem has a unique solution  and all these solutions are uniformly bounded with respect to
and all these solutions are uniformly bounded with respect to  and
and 
 (32)
(32)
Assume that

whence we obtain due to the estimate (32) for some constant 

Define the Lagrange functional

and the concave dual functional

Define also the notations


Here and below, we leave the notation  accepting in Section 1.
accepting in Section 1.
Let 
denote the unique point in  that maximizes on this set the functional
that maximizes on this set the functional

Applying in this situation, for example in the case of convexity of , Theorem 4.3 we obtain the following result.
, Theorem 4.3 we obtain the following result.
Theorem 5.1. For a minimizing approximate solution to Problem  to exist (and, hence, every its weak limit point belongs to
to exist (and, hence, every its weak limit point belongs to ), it is necessary and sufficient that there exists a sequence of dual variables
), it is necessary and sufficient that there exists a sequence of dual variables
 ,
, 
such that
 ,
, 
and the relations
 (33)
(33)
 (34)
(34)
hold for some elements
 .
.
Moreover, the sequence
is the desired minimizing approximate solution, and every weak limit point of this sequence is a solution to Problem . As a consequence of the limit relations (33), (34) the limit relation
. As a consequence of the limit relations (33), (34) the limit relation

holds. Simultaneously, every limit point of the sequence

is a maximizer of the dual problem
 .
.
The points , may be chosen as the points
, may be chosen as the points ,
,  where
where ,
, .
.
In conclusion of this subsection, we note that the Pontryagin maximum principle can be used for finding optimal elements  in the problem
in the problem
 (35)
(35)
Denote
where  is
is  matrix with lines
matrix with lines  ,
,  is
is  matrix with lines
matrix with lines .
.
Then, due to convexity of the problem (35) we can assert that any its minimizer  satisfies the following maximum principle.
satisfies the following maximum principle.
Theorem 5.2. The maximum relation
holds for the Lagrange multipliers , where
, where ,
,  is the solution of the adjoint problem
is the solution of the adjoint problem

5.2. Application in Ill-Posed Inverse Problems
Now we consider the illustrative example of the ill-posed inverse problem of final observation for a linear parabolic equation in the divergent form for recovering a distributed right-hand side of the equation, initial function, and boundary function on the side surface of the cylindrical domain for the third boundary value problem. Here we study the simplified inverse problem with a view of compact presentation. Similar but more general inverse problem may be found in [10].
Let ,
,  and
and  be convex compacts,
be convex compacts,
 ,
,
 ,
,
 be a bounded domain in
be a bounded domain in ,
,  ,
,
 ,
,
 ,
,
 .
.
Let us consider inverse problem of finding a triple  of unknown distributed, initial, and boundary coefficients for the third boundary value problem for the following linear parabolic equation of the divergent form
of unknown distributed, initial, and boundary coefficients for the third boundary value problem for the following linear parabolic equation of the divergent form
 (36)
(36)
determined by a final observation
 whose value is known approximately, at a certain
whose value is known approximately, at a certain . Here, similar to [11],
. Here, similar to [11],

and  is the angle between the external normal to
is the angle between the external normal to  and the
and the  axis, and
axis, and  is a number characterising an error of initial data,
is a number characterising an error of initial data,  is a fixed number. The solution
is a fixed number. The solution  to the boundary value problem (36) corresponding to the desired actions
to the boundary value problem (36) corresponding to the desired actions  is a weak solution in the sense of the class
is a weak solution in the sense of the class  [11]. Clearly, the solution to the inverse problem in such a statement may be not unique. Therefore, we will be interested in finding a normal solution, i.e., a solution with the minimal norm
[11]. Clearly, the solution to the inverse problem in such a statement may be not unique. Therefore, we will be interested in finding a normal solution, i.e., a solution with the minimal norm
 which we denote by
which we denote by .
.
It is easy to see that the above-formulated inverse problem of finding the normal solution by a given observation  is equivalent to the following fixed-time optimal control problem on finding a minimum-norm control triple
is equivalent to the following fixed-time optimal control problem on finding a minimum-norm control triple  with strongly convex objective functional and a semi-state equality constraint
with strongly convex objective functional and a semi-state equality constraint


where

The input data for the inverse problem (and, hence, for Problem  are assumed to meet the following conditions:
are assumed to meet the following conditions:
1) functions
 ,
,

are Lebesgue measurable;
2) the estimates
hold, where K > 0 is a constant not depending on ;
;
3) the boundary S is piece-wise smooth.
Denote by  approximate final observation (with parameter) and assume that
approximate final observation (with parameter) and assume that
 (37)
(37)
From conditions 1) - 3) and the theorem on the existence of a weak (generalized) solution of the third boundary value problem for a linear parabolic equation of the divergent type [11], (Chapter III, Section 5), [12] it follows that the direct problem (36) is uniquely solvable in  for any triple
for any triple  and any T > 0 and besides a priory estimate
and any T > 0 and besides a priory estimate

is true, where a constant C > 0 not depends on . The last facts together with the estimates (37) lead to corresponding necessary estimate for deviation of perturbed linear bounded operator
. The last facts together with the estimates (37) lead to corresponding necessary estimate for deviation of perturbed linear bounded operator ,
,
 from its unperturbed analog (details may be found in [10])
from its unperturbed analog (details may be found in [10])

where a constant C > 0 not depends on .
.
Define the Lagrange functional

with the minimizer  and the concave dual functional
and the concave dual functional

Let  denotes the unique point in
denotes the unique point in  that maximizes on this set the functional
that maximizes on this set the functional

Applying Theorem 4.1. in this situation of strong convexity of  we obtain the following result.
we obtain the following result.
Theorem 5.3. For a bounded minimizing approximate solution to Problem  to exist (and, hence, to converge strongly to
to exist (and, hence, to converge strongly to  as
as ), it is necessary that there exists a sequence of dual variable
), it is necessary that there exists a sequence of dual variable ,
,  , such that
, such that ,
,  , the limit relations
, the limit relations
 (38)
(38)
are fulfilled. Moreover, the latter sequence is the desired minimizing approximate solution to Problem ; that is,
; that is,
 .
.
At the same time, the limit relation
 (39)
(39)
is fulfilled.
Conversely, for a minimizing approximate solution to problem  to exist, it is sufficient that there exists a sequence of dual variable
to exist, it is sufficient that there exists a sequence of dual variable ,
,  such that
such that
 ,
,  the limit relations (38) are fulfilled. Moreover, the latter sequence is the desired to Problem
the limit relations (38) are fulfilled. Moreover, the latter sequence is the desired to Problem ; that is,
; that is,
 .
.
Besides, the limit relation (39) is also valid. Simultaneously, every weak limit point of the sequence , is a maximizer of the dual problem
, is a maximizer of the dual problem
 .
.
The points , may be chosen as the points
, may be chosen as the points
 ,
,  where
where ,
, .
.
Since the set D is bounded in Problem , we can apply for solving our inverse problem the regularized Kuhn-Tucker theorem in a form of iterated process also. Thus, Theorem 4.2. leads us to the following theorem.
, we can apply for solving our inverse problem the regularized Kuhn-Tucker theorem in a form of iterated process also. Thus, Theorem 4.2. leads us to the following theorem.
Theorem 5.4. For a minimizing approximate solution to Problem  to exist (and, hence, to converge strongly to
to exist (and, hence, to converge strongly to ), it is necessary that for the sequence of dual variable
), it is necessary that for the sequence of dual variable ,
,  , generated by iterated process
, generated by iterated process
 (40)
(40)
with the consistency conditions (8) the limit relations
 (41)
(41)
are fulfilled. In this case the sequence
is the desired minimizing approximate solution to Problem ; that is,
; that is,
 .
.
Simultaneously, the limit relation
 (42)
(42)
is fulfilled.
Conversely, for a minimizing approximate solution to Problem  to exist, it is sufficient that for the sequence of dual variable
to exist, it is sufficient that for the sequence of dual variable ,
,  , generated by iterated process (40) with the consistency conditions (8), the limit relations (41) are fulfilled. Moreover, the sequence
, generated by iterated process (40) with the consistency conditions (8), the limit relations (41) are fulfilled. Moreover, the sequence
 is the desired minimizing approximate solution to Problem
is the desired minimizing approximate solution to Problem ; that is,
; that is,
 .
.
Simultaneously, the limit relation (42) is valid.
REFERENCES
- V. M. Alekseev, V. M. Tikhomirov and S. V. Fomin, “Optimal Control,” Nauka, Moscow, 1979.
- F. P. Vasil’ev, “Optimization Methods,” Faktorial Press, Moscow, 2002.
- M. Minoux, “Mathematical Programming. Theory and Algorithms,” Wiley, New York, 1986.
- M. I. Sumin, “Duality-Based Regularization in a Linear Convex Mathematical Programming Problem,” Journal of Computational Mathematics and Mathematical Physics, Vol. 47, No. 4, 2007, pp. 579-600. doi:10.1134/S0965542507040045
- M. I. Sumin, “Ill-Posed Problems and Solution Methods. Materials to Lectures for Students of Older Years. TextBook,” Lobachevskii State University of Nizhnii Novgorod, Nizhnii Novgorod, 2009.
- M. I. Sumin, “Parametric Dual Regularization in a Linear-Convex Mathematical Programming,” In: R. F. Linton and T. B. Carrol, Jr., Eds., Computational Optimization: New Research Developments, Nova Science Publishers Inc., New-York, 2010, pp. 265-311.
- M. I. Sumin, “Regularized Parametric Kuhn-Tucker Theorem in a Hilbert Space,” Journal of Computational Mathematics and Mathematical Physics, Vol. 51, No. 9, 2011, pp. 1489-1509. doi:10.1134/S0965542511090156
- J. Warga, “Optimal Control of Differential and Functional Equations,” Academic Press, New York, 1972.
- A. N. Tikhonov and V. Ya Arsenin, “Methods of Solution of Ill-Posed Problems,” Halsted, New York, 1977.
- M. I. Sumin, “A Regularized Gradient Dual Method for Solving Inverse Problem of Final Observation for a Parabolic Equation,” Journal of Computational Mathematics and Mathematical Physics, Vol. 44, No. 12, 2004, pp. 1903-1921.
- O. A. Ladyzhenskaya, V. A. Solonnikov and N. N. Ural’tseva, “Linear and Quasilinear Equations of Parabolic Type,” Nauka, Moscow, 1967.
- V. I. Plotnikov, “Uniqueness and Existence Theorems and a Priori Properties of Generalized Solutions,” Doklady Akademii Nauk SSSR, Vol. 165, No. 1, 1965, pp. 33-35.
NOTES
*This work was supported by the Russian Foundation for Basic Research (project no. 12-01-00199-a) and by grant of the Ministry of Education and Science of the Russian Federation (project no. 1.1907.2011)