Applied Mathematics
Vol. 3 No. 6 (2012) , Article ID: 20282 , 6 pages DOI:10.4236/am.2012.36089
Oscillation of Higher Order Linear Impulsive Dynamic Equations on Time Scales
1College of Automation Science and Engineering, South China University of Technology, Guangzhou, China
2Department of Computational Science, Zhongkai University Agriculture and Engineering, Guangzhou, China
Email: zhcl88@126.com, *aufqdeng@scut.edu.cn
Received February 18, 2012; revised April 17, 2012; accepted April 24, 2012
Keywords: Oscillation; High Order; Dynamic Equation; Time Scale; Riccati Tramsformation
ABSTRACT
In this paper, we will establish some oscillation criteria for the higher order linear dynamic equation on time scale in term of the coefficients and the graininess function. We illustrate our results with an example.
1. Introduction
Since Stefen Hilger formed the definition of derivatives and integrals on time scales, several authors has expounded on various aspects of the new theory, see the papers by Agarwal et al. [1] and the references cited therein.
A book on the subject of time scale, i.e., measure chain, by Bohner and Peterson [2] summarize and organizes much of time scale calculus on time scale and references given therein.
A time scale  is an arbitrary closed subset reals, and the cases when this tie sale is equal to the reals or to the integers represent the classical theories of differential and of difference equations.
is an arbitrary closed subset reals, and the cases when this tie sale is equal to the reals or to the integers represent the classical theories of differential and of difference equations.
In recent years there has been much research activity concerning the oscillation and non-oscillation of solution of some differential equations on time scales,we refer the reader to the few papers [3-7].
In [4], the authors considered the second order dynamic equation

and some sufficient conditions for oscillation of all solution on unbounded time scales are given. But, the oscillation criteria are not considered the impulsive influence. It is rarely about the oscillation of higher order impulsive dynamic equations on time scales.
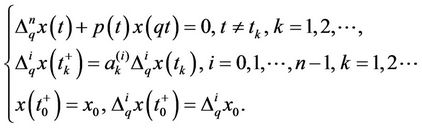
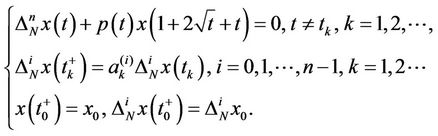
In this paper we shall consider the following linear higher order impulsive dynamic equation
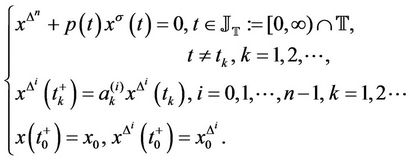 (1)
(1)
where n is even,  ,
,  is positive real-valued rd-continuous functions defined on the time scales and
is positive real-valued rd-continuous functions defined on the time scales and
(H1): 

Throughout the remainder of the paper, we assume that, for each  the points of impulses
the points of impulses  are right dense (rd for short). In order to define the solutions of the problem (1), we introduce the following space
are right dense (rd for short). In order to define the solutions of the problem (1), we introduce the following space
Definition 1. A function  is said to be a solution of (1), if it satisfies
is said to be a solution of (1), if it satisfies
 a.e. on
a.e. on , and for each
, and for each  satisfies the impulsive condition
satisfies the impulsive condition  and the initial conditions
and the initial conditions ,
, .
.
Before doing so, let us first recall that a solution of (1) is a nontrivial real function  satisfying Equation (1) for
satisfying Equation (1) for . A solution
. A solution  of (1) is said to be oscillatory if it is neither eventually positive nor eventually negative, otherwise it is non-oscillatory. Equation (1) is said to be oscillatory if all its solutions are oscillatory. Our attention is restricted to those solutions of (1) which exist on some half line
of (1) is said to be oscillatory if it is neither eventually positive nor eventually negative, otherwise it is non-oscillatory. Equation (1) is said to be oscillatory if all its solutions are oscillatory. Our attention is restricted to those solutions of (1) which exist on some half line  and satisfy
and satisfy  for any
for any 
2. Preliminaries
A time scale  is an arbitrary non-empty closed subset of the real numbers
is an arbitrary non-empty closed subset of the real numbers . Since we are interested in oscillatory behavior, we suppose that the time scale under consideration is not bounded above, i.e., it is a time scale interval of the form
. Since we are interested in oscillatory behavior, we suppose that the time scale under consideration is not bounded above, i.e., it is a time scale interval of the form . On any time scale we define the forward and backward jump operators by
. On any time scale we define the forward and backward jump operators by
 (2)
(2)
A point t is said to be left-dense if , right-dense if
, right-dense if  left scattered if
left scattered if , and right-scattered if
, and right-scattered if  The graininess
The graininess  of the time scale is define by
of the time scale is define by  The set
The set  is derived from
is derived from  as follow: If
as follow: If  has a left-scattered maximum m, then
has a left-scattered maximum m, then  otherwise,
otherwise, 
For a function  (the range
(the range  of may actually be replaced by any Banach space), the (delta) derivative is defined by
of may actually be replaced by any Banach space), the (delta) derivative is defined by
 (3)
(3)
A function  is said to be re-continuous at each right-dense point and if there exists a finite left limit in all left-dense points, and f is said to be differentiable if its derivative exists, the derivative and the shift operator
is said to be re-continuous at each right-dense point and if there exists a finite left limit in all left-dense points, and f is said to be differentiable if its derivative exists, the derivative and the shift operator  are related by the formula
are related by the formula
 (4)
(4)
We will make use of the following product and quotient rules for the derivative of the product fg and the quotient f/g of two differentiable functions f and g
 (5)
(5)
 (6)
(6)
The integration by parts formula reads
 (7)
(7)
Remark 1. We note that if , then
, then ,
,  ,
,  and (1) becomes the higher order differential equation
and (1) becomes the higher order differential equation

If  then
then ,
,  ,
,

and (1) becomes the higher order difference equation
If ,
,  then
then 

and (1) becomes the higher order difference equation
If  then
then ,
, 
and (1) becomes the higher order difference equation
If  then
then  and
and 
and (1) becomes the higher order difference equation
3. Main Results
In the following, we will prove some lemmas, which will be useful for establishing oscillation criteria .
Lemma 1. Let  and
and . Then
. Then

implies, for all 
 (8)
(8)
See .
.
Lemma 2. Assume that  and
and
 (9)
(9)
then for 
 (10)
(10)
Proof. Let , use Lemma 1, we obtain
, use Lemma 1, we obtain
Hence (10) is true for . Now assume that
. Now assume that
(10) holds for  for some integer
for some integer . Then for
. Then for , it follows from (9) and Lemma 1, we get
, it follows from (9) and Lemma 1, we get

Using (9), we obtain from (10)
which on simplification gives the estimate (10) for , by induction, we get (10) holds for
, by induction, we get (10) holds for .
.
Lemma 3. Let  be a solution of (1), and conditions (H1) are satisfied. Suppose that there exists an
be a solution of (1), and conditions (H1) are satisfied. Suppose that there exists an  and some
and some , such that
, such that
 ,
,  for
for . Then, there exists some
. Then, there exists some  such that
such that  for
for .
.
Proof. Without loss of generality, let . Assume that for any
. Assume that for any ,
, . By
. By ,
,
 ,
,  , we have that
, we have that  is monotonically nondecreasing on
is monotonically nondecreasing on . For
. For , we have
, we have
Integrating the above inequality, we have
 (11)
(11)
Similar to (11),
 (12)
(12)
By  and (11), (12), we have
and (11), (12), we have
Applying induction we have, for any natural number m,
 (13)
(13)
By condition (H1) and  for all sufficiently large m, we have
for all sufficiently large m, we have . i.e., there exists a natural number N, when
. i.e., there exists a natural number N, when , we have
, we have . By
. By
 again, we have
again, we have , for
, for
 . When
. When , we have
, we have , where
, where . The proof of Lemma 3 is completed.
. The proof of Lemma 3 is completed.
Lemma 4. Let  be a solution of (1) and conditions (H1) are satisfied. Suppose that there exists an
be a solution of (1) and conditions (H1) are satisfied. Suppose that there exists an  and some
and some  such that
such that ,
,  for
for .
.  is not always equal to 0 in
is not always equal to 0 in  for
for . Then we have
. Then we have  for all sufficiently large t.
for all sufficiently large t.
Proof. Without loss of generality, let . We claim that
. We claim that  for any
for any .
.
If it is not true, then there exists some  such that
such that . Since
. Since ,
,  is monotonically non-increasing in
is monotonically non-increasing in  for
for . And because
. And because  is not always equal to 0 in
is not always equal to 0 in , there exists some
, there exists some  such that
such that  is not always equal to 0 in
is not always equal to 0 in . Without loss of generality,we can assume
. Without loss of generality,we can assume , that is,
, that is,  is not always equal to 0 in
is not always equal to 0 in .So we have
.So we have

For , we have
, we have

By induction, for , we have
, we have  . So we have
. So we have

By Lemma 3, for all sufficiently large t, we have . Similarly, we can conclude, by using Lemma 3 repeatedly, that for all sufficiently large t,
. Similarly, we can conclude, by using Lemma 3 repeatedly, that for all sufficiently large t, . This is a contradiction with
. This is a contradiction with ! Hence, we have
! Hence, we have  for any
for any . So we have
. So we have  for all sufficiently large t. The proof of Lemma 4 is completed.
for all sufficiently large t. The proof of Lemma 4 is completed.
Lemma 5. Let  be a solution of (1) and conditions (H1) are satisfied. Suppose
be a solution of (1) and conditions (H1) are satisfied. Suppose  and
and  for
for . Then there exist some
. Then there exist some  and
and  such that for
such that for ,
,
 (14)
(14)
Proof. Let , for
, for  by (1) and
by (1) and  is nonnegative and is not always equal to 0 in any
is nonnegative and is not always equal to 0 in any ,
,

 is not always equal to 0 in
is not always equal to 0 in , by Lemma 4. So we have
, by Lemma 4. So we have  for all sufficiently large t. Without loss of generality, let
for all sufficiently large t. Without loss of generality, let ,
, . So
. So  is monotonically non-decreasing in
is monotonically non-decreasing in .
.
If for any ,
,  , then
, then .
.
If there exists some ,
,  , by
, by  is monotonically nondecreasing and
is monotonically nondecreasing and , then
, then  for
for . So there exists some
. So there exists some , when
, when , then one of the following statements holds:
, then one of the following statements holds:
(A1) 
(B1) 
when (A1) holds, by Lemma 3, then , for all sufficiently large t. By Lemma 3 over and over again, at last, for all sufficiently large t, we have
, for all sufficiently large t. By Lemma 3 over and over again, at last, for all sufficiently large t, we have

When (B1) holds, by Lemma 4, then , for all sufficiently large t. By deducing further, there exists some
, for all sufficiently large t. By deducing further, there exists some , when
, when , then one of the following statements holds:
, then one of the following statements holds:
(A2) 
(B2) 
discuss the above over and over,eventually, there exists some  and
and , when
, when , we have
, we have
The proof of Lemma 5 is completed.
Remark 2. If  is an eventually negative solution of (1),we have conclusions similar to Lemma 4 and Lemma 5.
is an eventually negative solution of (1),we have conclusions similar to Lemma 4 and Lemma 5.
Theorem 1. If conditions (H1) hold, and
 (15)
(15)
then every solution of (1) is oscillatory.
Proof. Let  be a non-oscillatory solution of (1). Without loss of generality, let
be a non-oscillatory solution of (1). Without loss of generality, let  By Lemma 5 and (1), there exists
By Lemma 5 and (1), there exists  when
when , we have
, we have
 (16)
(16)
Let . when
. when ,
,  is monotonically non-increasing in
is monotonically non-increasing in  and
and  is monotonically increasing in
is monotonically increasing in .
.
By (1), we have
 (17)
(17)
Integrating (17) from  to
to  we have
we have
 (18)
(18)
by the above equation and  is monotonically increasing, we have
is monotonically increasing, we have
then
 (19)
(19)
similar to (19), we have
 (20)
(20)
By (19), (20) and  being monotonically increasing,
being monotonically increasing,
similarly ,we have

then
By induction we have,for any natural number ,
,
 (21)
(21)
By (15), (21) and , for all sufficiently lager m, we have
, for all sufficiently lager m, we have
This contradicts , for
, for . Hence, every solution of (1) is oscillatory. The proof of theorem 1 is completed.
. Hence, every solution of (1) is oscillatory. The proof of theorem 1 is completed.
Corollary 1. Assume the conditions (H1) holds, and there exists a positive integer  such that
such that  for
for . If
. If , then every solution of (1) is oscillatory.
, then every solution of (1) is oscillatory.
Proof. Without loss of generality, let . By
. By
 , we get
, we get , therefore
, therefore
Let ,
,  ,we get that (15) of Theorem 1 holds. By Theorem 1, we know that every solution of (1) is oscillatory.
,we get that (15) of Theorem 1 holds. By Theorem 1, we know that every solution of (1) is oscillatory.
Corollary 2. Assume the condition (H1) holds and there exist a positive integer  and some positive integer
and some positive integer , such that
, such that , for
, for . Furthermore, assume that
. Furthermore, assume that , then every solution of (1) is oscillatory.
, then every solution of (1) is oscillatory.
Proof. By , we have
, we have
Let ,
,  , we get that (15) of Theorem 1 holds. By Theorem 1, we know that every solution of (1) is oscillatory.
, we get that (15) of Theorem 1 holds. By Theorem 1, we know that every solution of (1) is oscillatory.
4. Example
Example. Consider
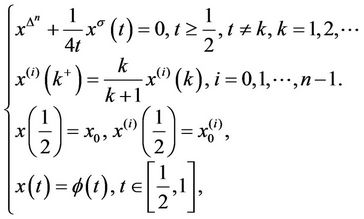 (22)
(22)
where n is even,  ,
,  ,
,  ,
,  ,
, . For condition (H1)
. For condition (H1)
when 
From the above, the condition (H1) holds.
Let
 ,
,

By Corollary 2, we know that every solution of (22) is oscillatory.
REFERENCES
- R. P. Agarwal and M. Bohner, “Basic Calculus on Time Scales and Some of Its Applications,” Results in Mathematics, Vol. 35, 1999, pp. 3-22.
- M. Bohner and A. Peterson, “Dynamic Equations on Time Scales: An Introduction with Applications,” Birkhäuser, Boston, 2001.
- L. H. Erbe, “Oscillation Criteria for Second Order Linear Equations on Atime Scale,” Canadian Applied Mathematics Quarterly, Vol. 9, No. 4, 2001, pp. 345-375.
- A. Del Medico and Q. K. Kong, “Kamenev-Type and Interval Oscillation Critera for Second-Order Linear Differential Equations on a Measure Chain,” Journal of Mathematical Analysis and Applications, Vol. 294, 2004, pp. 621-643. doi:10.1016/j.jmaa.2004.02.040
- M. Benchohra, S. Hamani and J. Henderson, “Oscillation and Nonoscillation for Impulsive Dynamic Equations on Certain Time Scales,” Advances in Difference Equations, Vol. 2006, 2006, pp. 1-12. doi:10.1155/ADE/2006/60860
- M. Benchohra, J. Henderson, S. K. Ntouyas and A. Ouahab, “On First Order Impulsive Dynamic Equations on Time Scales,” Journal of Difference Equations and Applications, Vol. 10, No. 6, 2004, pp. 541-548. doi:10.1080/10236190410001667986
- L. Erbe and A. Peterson, “Oscillation Criteria for Second-Order Matrix Dynamic Equations on Time Scales,” Journal of Mathematical Analysis and Applications, Vol. 275, 2002, pp. 418-438. doi:10.1016/S0022-247X(02)00390-6
NOTES
*Corresponding author.