Journal of Applied Mathematics and Physics
Vol.04 No.08(2016), Article ID:70202,5 pages
10.4236/jamp.2016.48176
A Maximum Principle Result for a General Fourth Order Semilinear Elliptic Equation
A. Mareno
Penn State University, Middletown, USA

Copyright © 2016 by author and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 2 June 2016; accepted 27 August 2016; published 30 August 2016
ABSTRACT
We obtain maximum principles for solutions of some general fourth order elliptic equations by modifying an auxiliary function introduced by L.E. Payne. We give a brief application of these maximum principles by deducing apriori bounds on a certain quantity of interest.
Keywords:
Nonlinear, Fourth Order, Partial Differential Equation, Semilinear

1. Introduction
In [1] , Payne obtains maximum principle results for the semilinear fourth order elliptic equation
 (1)
(1)
by proving that certain functionals defined on the solution of (1) are subharmonic. In this work, functionals containing the terms  are utilized and apriori bounds on the integral of the square of the second gradient and on the square of the gradient of the solution are deduced. Since then, many authors [2] - [11] and references therein have used this technique to obtain maximum principle results for other fourth order elliptic differential equations whose principal part is the biharmonic operator.
are utilized and apriori bounds on the integral of the square of the second gradient and on the square of the gradient of the solution are deduced. Since then, many authors [2] - [11] and references therein have used this technique to obtain maximum principle results for other fourth order elliptic differential equations whose principal part is the biharmonic operator.
Other works deal with the more general fourth order elliptic operator , where
, where  and
and . In [12] , Dunninger mentions that functionals containing the term
. In [12] , Dunninger mentions that functionals containing the term  can be used to obtain maximum principle results for such linear equations as
can be used to obtain maximum principle results for such linear equations as

A similar approach is taken in [13] for a class of nonlinear fourth order equations.
In this paper, we modify the results in [1] and a matrix result from [14] to deduce maximum principles defined on the solutions to semilinear fourth order elliptic equations of the form:
 (2)
(2)
Then we briefly indicate how these maximum principles can be used to obtain apriori bounds on a certain quantity of interest.
2. Results
Throughout this paper, the summation convention on repeated indices is used; commas denote partial differentiation. Let  be a symmetric matrix. Moreover let
be a symmetric matrix. Moreover let , be a uniformly elliptic operator, i.e, the symmetric matrix
, be a uniformly elliptic operator, i.e, the symmetric matrix  is positive definite and satisfies the uniform ellipticity condition:
is positive definite and satisfies the uniform ellipticity condition:  , where
, where  is a bounded domain in
is a bounded domain in  and
and .
.
Let u be a  solution to the equation
solution to the equation
 (3)
(3)
where f is say, a  function. Now we define the functional
function. Now we define the functional

We show that  is subharmonic and note that the constants
is subharmonic and note that the constants  and
and  and any constraints on f are yet to be determined.
and any constraints on f are yet to be determined.
By a straight-forward calculation, we have

Now we write
 (4)
(4)
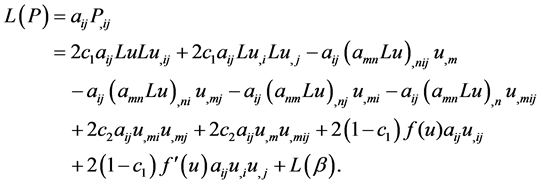
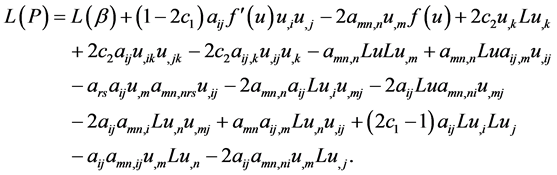
By expanding out the derivative terms in parentheses, we see that  is
is
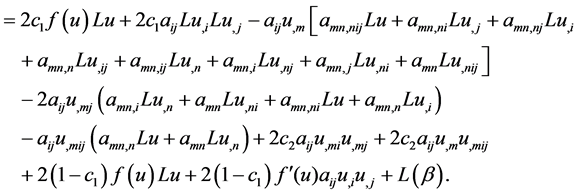 (5)
(5)
The terms in lines 2 and 3 above containing two or more derivatives of  can be rewritten using (3) in the form
can be rewritten using (3) in the form , where
, where  denotes the matrix which is the inverse of the positive definite matrix
denotes the matrix which is the inverse of the positive definite matrix . Furthermore, we use the identity
. Furthermore, we use the identity  to rewrite the last two terms in line 4. Hence,
to rewrite the last two terms in line 4. Hence,
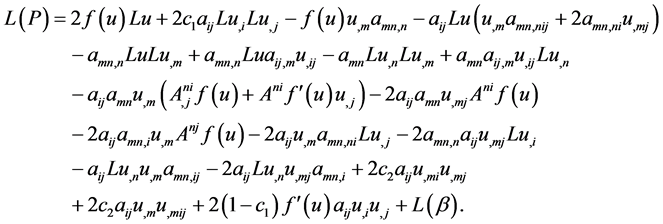 (6)
(6)
Using the identity above for  and the additional identity,
and the additional identity,  , which can be obtained by computing
, which can be obtained by computing , for the terms at the ends of lines 6 and 3 respectively, we obtain
, for the terms at the ends of lines 6 and 3 respectively, we obtain
 (7)
(7)
To show that  is nonnegative, we establish a series of inequalities based on the following one from [14] : Let
is nonnegative, we establish a series of inequalities based on the following one from [14] : Let  be any
be any  matrix. From the inequality
matrix. From the inequality
 (8)
(8)
One can deduce
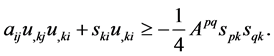 (9)
(9)
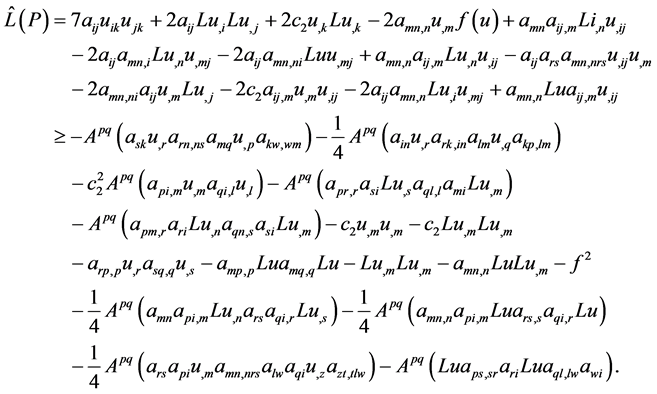
Repeated use of (9) on terms in lines 2, 3, 4, 5 in (7) yields the following:
 (10)
(10)
 (11)
(11)
 (12)
(12)
 (13)
(13)
 (14)
(14)
 (15)
(15)
 (16)
(16)
 (17)
(17)
 (18)
(18)
Furthermore, by completing the square, we obtain useful inequalities for the last two terms in line 1 and the third term in line 2 of (7):
 (19)
(19)
 (20)
(20)
 (21)
(21)
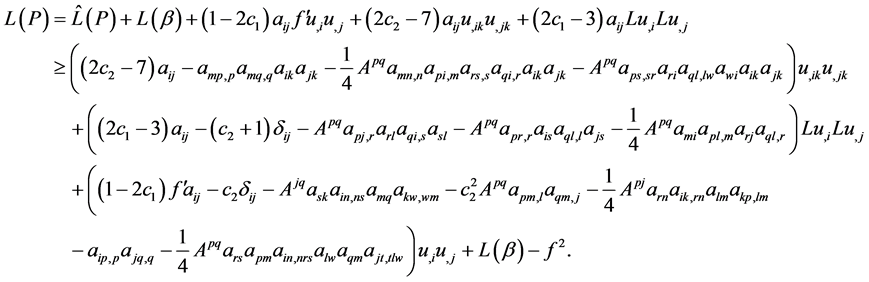
We add (10)-(21) and label the resulting inequality, for part of , as
, as
Now,
Since  is positive definite, for a sufficiently large value of
is positive definite, for a sufficiently large value of , where
, where  depends on the coefficients
depends on the coefficients  and their derivatives, and for a sufficiently large value of
and their derivatives, and for a sufficiently large value of , say
, say , where
, where  depends on the constants
depends on the constants ,
,  ,
,  , and various derivatives of
, and various derivatives of ,
,  can be made nonnegative as desired. Thus we have the following result.
can be made nonnegative as desired. Thus we have the following result.
Theorem 1. Suppose that  is a solution of (2) and
is a solution of (2) and . If
. If , where
, where ,
,  ,
,  is a nonnegative function such that
is a nonnegative function such that  then there exists positive constants
then there exists positive constants  and
and  sufficiently large
sufficiently large  such that P cannot attain its maximum value in
such that P cannot attain its maximum value in  unless it is a constant.
unless it is a constant.
We note that the function  satisfies the conditions stated in Theorem 1 for a solution that is bounded above.
satisfies the conditions stated in Theorem 1 for a solution that is bounded above.
3. Bounds
Here we give a brief application of Theorem 1.
Suppose that
By Theorem 1,

Using integration by parts on the first two terms of P yields the identity

Upon integrating both sides of the previous inequality we deduce
 (22)
(22)
 (23)
(23)
Cite this paper
A. Mareno, (2016) A Maximum Principle Result for a General Fourth Order Semilinear Elliptic Equation. Journal of Applied Mathematics and Physics,04,1682-1686. doi: 10.4236/jamp.2016.48176
References
- 1. Payne, L.E. (1976) Some Remarks on Maximum Principles. Journal d’Analyse Mathematique, 30, 421-433.
http://dx.doi.org/10.1007/BF02786729 - 2. Danet, C.-P. (2014) Two Maximum Principles for a Nonlinear Fourth Order Equation from Thin Plate Theory. Electronic Journal of Qualitative Theory of Differential Equations, 31, 1-9.
- 3. Danet, C.P. (2011) Uniqueness in Some Higher Elliptic Boundary Value Problems in n Dimension Domain. Electronic Journal of Qualitative Theory of Differential Equations, 54, 1-12.
- 4. Dhaigude, D.B., Dhaigude, R.M. and Lomte, G.C. (2012) Maximum Principles for Fourth Order Uniformly Elliptic Equations with Applications. International Journal of Applied Mathematical Research, 3, 248-258.
- 5. Goyal, S. and Goyal, V.B. (2011) On Some Fourth Order Elliptic Boundary Value Problems. Applied Mathematical Sciences, 36, 1781-1793.
- 6. Lomte, G.C. and Dhaigude, R.M. (2013) Maximum Principles for Fourth Order Semilinear Elliptic Boundary Value Problems. Malaya Journal of Matematik, 1, 44-48.
- 7. Lu, W.D. and Wang, J.H. (1981) Maximum Principles for Some Semilinear Elliptic Equations of Fourth Order, and Their Application. Sichuan Daxue Xuebao, 4, 33-45. (In Chinese)
- 8. Mareno, A. (2008) Maximum Principles for a Fourth Order Equation from Thin Plate Theory. Journal of Mathematical Analysis and Applications, 343, 932-937.
http://dx.doi.org/10.1016/j.jmaa.2008.02.004 - 9. Mareno, A. (2010) Integral Bounds for von Karmans Equations. ZAMM, 90, 509-513.
http://dx.doi.org/10.1002/zamm.200900325 - 10. Mareno, A. (2011) Maximum Principles for Some Higher Order Semilinear Elliptic Equations. Glasgow Mathematical Journal, 53, 313-320.
http://dx.doi.org/10.1017/S001708951000073X - 11. Zhang, H. and Zhang, W. (2002) Maximum Principles and Bounds in a Class of Fourth Order Uniformly Elliptic Equations. Journal of Physics A: Mathematical and General, 35, 9245-9250.
http://dx.doi.org/10.1088/0305-4470/35/43/318 - 12. Dunninger, D.R. (1972) Maximum Principles for Solutions of Some Fourth Order Elliptic Equations. Journal of Mathematical Analysis and Applications, 37, 655-658.
http://dx.doi.org/10.1016/0022-247X(72)90248-X - 13. Nichols, E.C. and Schaefer, P.W. (1987) A Maximum Principle In Nonlinear Fourth Order Elliptic Equations. Lecture Notes in Pure and Applied Mathematics, 109, 375-379.
- 14. Schaefer, P.W. (1987) Pointwise Estimates in a Class of Fourth-Order Nonlinear Elliptic Equations. ZAMP, 38, 477-479.
http://dx.doi.org/10.1007/BF00944964