Paper Menu >>
Journal Menu >>
 Wireless Sensor Network, 2010, 2, 173-185 doi:10.4236/wsn.2010.22023 ublished Online February 2010 (http://www.SciRP.org/journal/wsn/). Copyright © 2010 SciRes. WSN P A Study on Vehicle Detection and Tracking Using Wireless Sensor Networks G. Padmavathi1, D. Shanmugapriya2, M. Kalaivani1 1Department of Computer Science, Avinashilingam University for Women, Coimbatore, Tamil Nadu, India 2 Department of Information Technology, Avinashilingam University for Women, Coimbatore, Tamil Nadu, India E-mail: {ganapathi.padmavathi, kalaivanim}@gmail.com, ds_priyaa@rediffmail.com Received October 26, 2009; revised November 11, 2009; accepted December 7, 2009 Abstract Wireless Sensor network (WSN) is an emerging technology and has great potential to be employed in critical situations. The development of wireless sensor networks was originally motivated by military applications like battlefield surveillance. However, Wireless Sensor Networks are also used in many areas such as Indus- trial, Civilian, Health, Habitat Monitoring, Environmental, Military, Home and Office application areas. De- tection and tracking of targets (eg. animal, vehicle) as it moves through a sensor network has become an in- creasingly important application for sensor networks. The key advantage of WSN is that the network can be deployed on the fly and can operate unattended, without the need for any pre-existing infrastructure and with little maintenance. The system will estimate and track the target based on the spatial differences of the target signal strength detected by the sensors at different locations. Magnetic and acoustic sensors and the signals captured by these sensors are of present interest in the study. The system is made up of three components for detecting and tracking the moving objects. The first component consists of inexpensive off-the shelf wireless sensor devices, such as MicaZ motes, capable of measuring acoustic and magnetic signals generated by ve- hicles. The second component is responsible for the data aggregation. The third component of the system is responsible for data fusion algorithms. This paper inspects the sensors available in the market and its strengths and weakness and also some of the vehicle detection and tracking algorithms and their classifica- tion. This work focuses the overview of each algorithm for detection and tracking and compares them based on evaluation parameters. Keywords: Wireless Sensor Networks, Acoustic and Magnetic Sensors, Acoustic and Magnetic Signals, Detection and Tracking Algorithms 1. Introduction The Wireless Sensor Networks comprise of relatively inexpensive sensor nodes capable of collecting, process- ing, storing and transferring information from one node to another. These nodes are able to autonomously form a network through which sensor readings can be propa- gated. Since the sensor nodes have some intelligence, data can be processed as it flows through the network. Sensing devices will be able to monitor a wide variety of ambient conditions: temperature, pressure, humidity, soil makeup, vehicular movement, noise levels, lighting con- ditions, the presence or absence of certain kinds of ob- jects, mechanical stress levels on attached objects and so on. These devices will also be equipped with significant processing, memory and wireless communication capa- bilities. Emerging low-level and low-power wireless communication protocols can be used to networks the sensors. This capability will add a new dimension to the capabilities of sensors. Sensors will be able to coordinate among themselves on a higher-level sensing task. The sensors can be deployed in any facility or area, which has to be sensed in three main types. It can either be 1) tri- angular sensor deployment, 2) square sensor deployment and 3) irregular sensor deployment [1]. These deploy- ments are depicted in Figure 1. Networking inexpensive sensors can revolutionize in- formation gathering in a variety of situations. A sensor node usually consists of four sub-systems: A computing subsystem: In a sensor node, the mi- croprocessor (microcontroller unit, MCU) is responsible for functions such as control of sensors and execution of communication protocols. A communication subsystem: This comprises of 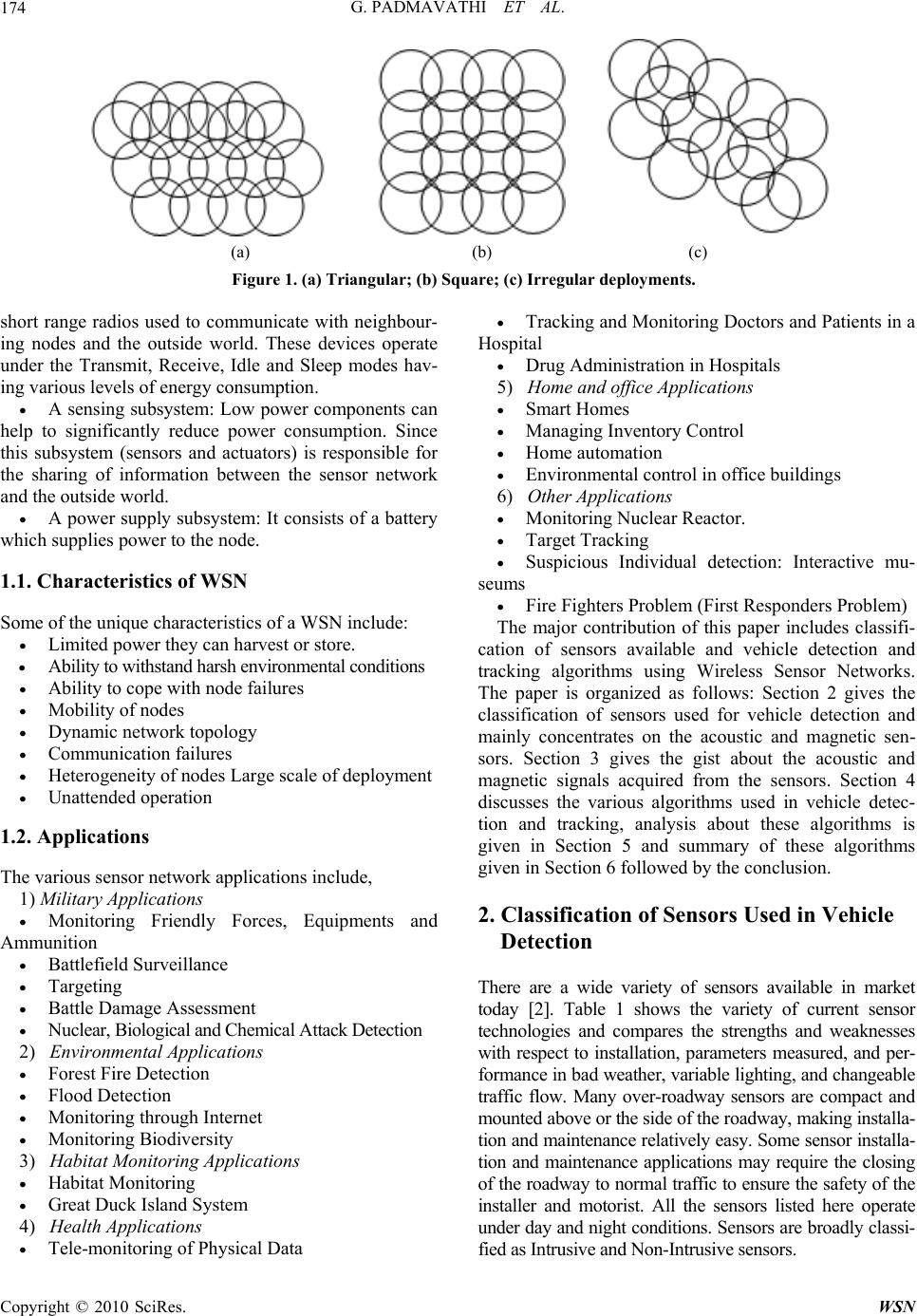 G. PADMAVATHI ET AL. 174 (a) (b) (c) Figure 1. (a) Triangular; (b) Square; (c) Irregular deployments. short range radios used to communicate with neighbour- ing nodes and the outside world. These devices operate under the Transmit, Receive, Idle and Sleep modes hav- ing various levels of energy consumption. A sensing subsystem: Low power components can help to significantly reduce power consumption. Since this subsystem (sensors and actuators) is responsible for the sharing of information between the sensor network and the outside world. A power supply subsystem: It consists of a battery which supplies power to the node. 1.1. Characteristics of WSN Some of the unique characteristics of a WSN include: Limited power they can harvest or store. Ability to withstand harsh environmental conditions Ability to cope with node failures Mobility of nodes Dynamic network topology Communication failures Heterogeneity of nodes Large scale of deployment Unattended operation 1.2. Applications The various sensor network applications include, 1) Military Applications Monitoring Friendly Forces, Equipments and Ammunition Battlefield Surveillance Targeting Battle Damage Assessment Nuclear, Biological and Chemical Attack Detection 2) Environmental Applications Forest Fire Detection Flood Detection Monitoring through Internet Monitoring Biodiversity 3) Habitat Monitoring Applications Habitat Monitoring Great Duck Island System 4) Health Applications Tele-monitoring of Physical Data Tracking and Monitoring Doctors and Patients in a Hospital Drug Administration in Hospitals 5) Home and office Applications Smart Homes Managing Inventory Control Home automation Environmental control in office buildings 6) Other Applications Monitoring Nuclear Reactor. Target Tracking Suspicious Individual detection: Interactive mu- seums Fire Fighters Problem (First Responders Problem) The major contribution of this paper includes classifi- cation of sensors available and vehicle detection and tracking algorithms using Wireless Sensor Networks. The paper is organized as follows: Section 2 gives the classification of sensors used for vehicle detection and mainly concentrates on the acoustic and magnetic sen- sors. Section 3 gives the gist about the acoustic and magnetic signals acquired from the sensors. Section 4 discusses the various algorithms used in vehicle detec- tion and tracking, analysis about these algorithms is given in Section 5 and summary of these algorithms given in Section 6 followed by the conclusion. 2. Classification of Sensors Used in Vehicle Detection There are a wide variety of sensors available in market today [2]. Table 1 shows the variety of current sensor technologies and compares the strengths and weaknesses with respect to installation, parameters measured, and per- formance in bad weather, variable lighting, and changeable traffic flow. Many over-roadway sensors are compact and mounted above or the side of the roadway, making installa- tion and maintenance relatively easy. Some sensor installa- tion and maintenance applications may require the closing of the roadway to normal traffic to ensure the safety of the installer and motorist. All the sensors listed here operate under day and night conditions. Sensors are broadly classi- fied as Intrusive and Non-Intrusive sensors. Copyright © 2010 SciRes. WSN  G. PADMAVATHI ET AL.175 Table 1. Strengths and weaknesses of commercially available sensor technologies. Technology Strengths Weaknesses Inductive loop Flexible design to satisfy large variety of applications. Mature, well understood technology. Large experience base. Provides basic traffic parameters (e.g., volume, pres- ence, occupancy, speed, headway, and gap). Insensitive to inclement weather such as rain, fog, and snow. Provides best accuracy for count data as compared with other commonly used techniques. Common standard for obtaining accurate occupancy measurements. High frequency excitation models provide classifica- tion data. Installation requires pavement cut. Improper installation decreases pavement life. Installation and maintenance require lane closure. Wire loops subject to stresses of traffic and temperature. Multiple loops usually required to monitor a location. Detection accuracy may decrease when design requires detection of a large variety of vehicle classes. Magnetometer (two-axis fluxgate magnetometer) Less susceptible than loops to stresses of traffic. Insensitive to inclement weather such as snow, rain, and fog. Some models transmit data over wireless radio fre- quency (RF) link. Installation requires pavement cut. Improper installation decreases pavement life. Installation and maintenance require lane closure. Models with small detection zones require multiple units for full lane detection. Magnetic (induction or search coil mag- netometer) Can be used where loops are not feasible (e.g., bridge decks). Some models are installed under roadway without need for pavement cuts. However, boring under roadway is required. Insensitive to inclement weather such as snow, rain, and fog. Less susceptible than loops to stresses of traffic. Installation requires pavement cut or boring under roadway. Cannot detect stopped vehicles unless special sensor layouts and signal processing software are used. Microwave radar Typically insensitive to inclement weather at the relatively short ranges encountered in traffic man- agement applications. Direct measurement of speed. Multiple lane operation available. Continuous wave (CW) Doppler sensors cannot detect stopped vehicles Active infrared (laser radar) Transmits multiple beams for accurate measurement of vehicle position, speed, and class. Multiple lane operation available. Operation may be affected by fog when visibility is less than 20 feet (ft) (6 m) or blowing snow is present. Installation and maintenance, including periodic lens clean- ing, require lane closure Passive infrared Multizone passive sensors measure speed. Passive sensor may have reduced vehicle sensitivity in heavy rain, snow and dense fog. Some models not recommended for presence detection. Ultrasonic Multiple lane operation available Capable of over height vehicle detection. Large Japanese experience base. Environmental conditions such as temperature change and extreme air turbulence can affect performance. Temperature compensation is built into some models. Large pulse repetition periods may degrade occupancy measurement on freeways with vehicles travelling at moder- ate to high speeds. Acoustic Passive detection. Insensitive to precipitation. Multiple lane operation available in some models. Cold temperatures may affect vehicle count accuracy. Specific models are not recommended with slow-moving vehicles in stop-and-go traffic. Video image proces- sor Monitors multiple lanes and multiple detection zones/lane. Easy to add and modify detection zones. Rich array of data available. Provides wide-area detection when information gath- ered at one camera location can be linked to another. Installation and maintenance, including periodic lens clean- ing, require lane closure when camera is mounted over roadway (lane closure may not be required when camera is mounted at side of roadway). Performance affected by inclement weather such as fog, rain, and snow; vehicle shadows; vehicle projection into adjacent lanes; day-to-night transition; vehicle/road con- trast; and water, salt grime, icicles, and cobwebs on camera lens. Reliable night-time signal actuation requires street lighting. Requires 30- to 50-ft (9- to 15-m) camera mounting height (in a side-mounting configuration) for optimum presence detection and speed measurement. Some models are susceptible to camera motion caused by strong winds or vibration of camera mounting structure. Generally cost effective when many detection zones within the camera field of view or specialized data are required. Copyright © 2010 SciRes. WSN  G. PADMAVATHI ET AL. 176 2.1. Intrusive Sensors Intrusive sensors are those that need to be installed under the pavement, in saw-cuts or holes on the roads. Popular intrusive sensors include inductive loops, magnetometers, micro loop probes, pneumatic road tubes, piezoelectric cables and other weigh-in-motion sensors. The main ad- vantage of these sensors is their high accuracy for vehi- cle detection while the drawbacks include the disruption of traffic for installation and repair, resulting in high in- stallation and maintenance cost. 2.2. Non-Intrusive Sensors To overcome the disadvantage of intrusive sensors, non-intrusive sensors are developed eg, above ground vehicle detection sensors. Above ground sensors can be mounted above the lane of traffic or on the side of a roadway where they can view multiple lanes of the traf- fic at angles perpendicular to or at a slanting angle to the flow direction. Technologies used in aboveground sen- sors include video image processing (VIP), microwave radar, laser radar, passive infrared, ultrasonic, passive acoustic array, and combinations of these sensor tech- nologies. However, these non-intrusive sensors tend to be large size and power hunger. 2.3. Smart-Dust Sensor Node-Hardware Platform Smart-Dust is one of the potential sensor nodes which can be used in the future vehicle detection system. In Smart-Dust sensor node, essential components for vehi- cle detection (processor, memory, sensor and radio) could be integrated together as small as a quarter through MEMS technology. Together with its low power design [3], the Smart-Dust sensor node is suitable for imple- menting the vehicle detection sensor networks. Figure 2 shows the different generations of Smart Dust sensor nodes (Motes). The left picture is a 1st generation smart dust sensor node “Rene Mote”. From left to right, the right picture shows the “MICA Mote” (2nd generation), “MICA2 Mote” (3rd generation) and “MICA2-Dot Mote (3rd generation)”. Smart-Dust sensor node is designed by EECS department in UC Berkeley and Intel [4] using modular component approach and it consists of two ma- jor components: mother board and sensor board. Thus, different sensor boards could be attached to the same mother board for different applications. Thus, Smart- Figure 2. Dust family. Dust sensor node could potentially be used in a wide range of applications such as vehicle detection, enemy monitoring in the battlefield, temperature measurement in a building, environmental monitoring etc. The basic components of MICA mote shown in Figure 3 belongs to the Smart-Dust family. The components are listed in Table 2. The mother board consists of an Atmel 90LS8535 processor, 512KB SRAM, 8KB Flash RAM and a RF transceiver for wireless communication. The Sensor board consists of a 10-bit analog to digital con- verter, a Magnetometer (Honeywell HMC1002), a tem- perature sensor, a photo camera and an accelerometer sensor. For vehicle detection system, the sensors used are the magnetometer and acoustic sensors. Next, the basic op- erating principles of magnetometer and acoustic sensors are will be reviewed. 2.3.1. Acoustic Sensors The acoustic sensor in the Smart Dust sensor node is a condenser type microphone. The schematic for a typical condenser acoustic sensor is shown in Figure 4. It in- cludes a stretched metal diaphragm that forms one plate of a capacitor. A metal disk placed close to the dia- phragm acts as a backplate. A stable DC voltage is ap- plied to the plates through a high resistance to keep elec- trical charges on the plates. When a sound field excites the diaphragm, the capacitances between the two plates vary according to the variation in the sound pressure. The change in the capacitance generates an AC output proportional to the sound pressure, which shows the ultra low-frequency pressure variation. A high-frequency voltage (carrier) is applied across the plates and the acoustic sensor output signal is the modulated carrier. The photo in the right of Figure 4 shows the Panasonic Figure 3. MICA mote. Table 2. Components of smart dust mote. Mother Board Sensor Board Atmel 90LS8535 processor (clocked at 4 MHz) 10-bit analog to digital con- verter RF Monolithics transceiver (916.50 MHz) Magnetometer(Honeywell HMC1002) Microphone (Panasonic WM-62A) Temperature Sensor Photo Camera 512KB SRAM, 8KB Flash RAM Accelerometer Sensor Copyright © 2010 SciRes. WSN  G. PADMAVATHI ET AL.177 Figure 4. Condenser microphone. AP-the acoustic pressure; C-the variable capacitance; 1-the metal diaphragm; 2-the metal disk; 3-the insulator; 4-the case. Figure 5. Waveforms of acoustic signals emitted from truck. WM-62A condenser microphones used in Smart Dust Motes. Figure 5 shows a typical vehicle acoustic signal waveforms. 2.3.2. Magnetic Sensors Magnetic sensors differ from most other detectors in that they do not directly measure the physical property of interest. Devices that monitor properties such as tem- perature, pressure, strain, or flow provides an output that directly reports the desired parameter (Figure 6). Mag- netic sensors, on the other hand, detect changes, or dis- turbances, in magnetic fields that have been created or modified, and from them derive information on proper- ties such as direction, presence, rotation, angle, or elec- trical currents. The output signal of these sensors re- quires some signal processing for translation into the desired parameter. Although magnetic detectors are somewhat more difficult to use, they do provide accurate and reliable data without physical contact. The Honeywell HMC1002 magnetometer on the MICA sensor board is a magnetoresistive sensor. Hon- eywell magnetic sensors and magnetometers offer com- plete magnetic field sensing solutions that are highly accurate, and allow for easy integration for virtually any application. Figure 7 shows the honeywell magnetic sensors. The Anisotropic Magneto Resistive (AMR) sensor is one type that has a wide Earth’s field sensing range and can sense both the strength and direction of the Earth field. The AMR sensor is made of a nickel-iron (Per- malloy) thin film deposited on a silicon wafer and pat- terned as a resistive strip. The strip resistance changes about 2%-3% when a magnetic field is applied. Typically, four of these resistive strips are connected in a wheat- stone bridge configuration so that both magnitude and direction of a field along a single axis can be measured. The key benefit of AMR sensors is that they can be bulk manufactures on silicon wafers mounted in commercial integrated circuit packages. Figure 8 shows a typical ve- hicle magnetic signal waveforms. Figure 6. Magnetic sensor parameters. Figure 7. Magnetic sensors. Figure 8. Waveforms of magnetic signals. Copyright © 2010 SciRes. WSN  G. PADMAVATHI ET AL. Copyright © 2010 SciRes. WSN 178 Magnetic Field A magnetic field is a vector field that surrounds mag- nets and electric currents, and is detected by the force it exerts on moving electric charges and on magnetic materi- als. When placed in a magnetic field, magnetic dipoles tend to align their axes parallel to the magnetic field. Magnetic fields also have their own energy with an energy density proportional to the square of the field intensity. Magnetic Data Magnetic data is the term used for data that is acquired from magnetic (as opposed to optical) motion capture systems. A central magnet is used to create a field in which sensors can determine their position and orienta- tion as they move about in the field. Raw magnetic data has no hierarchy information; the sensors do not know where they are relative to the other sensors, and know their position in the magnetic field. The file formats for magnetic motion capture data reflect this. In this respect, they are somewhat similar to the BVA file format. The problem associated with magnetometer vehicle detection is similar to the acoustic sensors but the mag- netic signals are much cleaner than acoustic signals. The magnetometers available today can sense magnetic fields within the earth’s field-below 1 gauss. They can be used for detecting the vehicles, which are ferrous objects that disturb the earth’s field. The earth’s field provides a uni- form magnetic field over wide area in the scale of kilo- metres and even a ferrous object can create a local dis- turbance in this field. This local field disturbance can be sensed by the magnetometers for vehicle detection. Fig- ure 9 shows the disturbance of earth’s magnetic field by a car. After presenting the basic principles of sensors, the characteristics of the measured acoustic and magnetic signals will be studied and algorithms are proposed for reliable low cost vehicle detection. 3. Signals for Vehicle Detection and Tracking The signals taken into consideration for study in this proposal are acoustic and magnetic signals. Figure 9. Earth’s magnetic field disturbed by a car. 3.1. Acoustic Signals The acoustic signature is made up of a number of indi- vidual elements. These include: Machinery noise: noise generated by a ships engines, propeller shafts, fuel pumps, air conditioning systems, etc. Cavitation noise: noise generated by the creation of gas bubbles by the turning of a ship’s propellers. Hydrodynamic noise: noise generated by the movement of water displaced by the hull of a moving vessel. These emissions depend on a hull’s dimensions, the installed machinery and ship’s displacement. Therefore, different ship classes will have different combinations of acoustic signals that together form a unique signature. Sonar operating in passive mode can detect acoustic signals radiated by invisible submarines and these signals are used to target attacks. 3.2. Magnetic Signals Magnetic Signals are changes that happen in the magnetic field caused by the movement of ferrous objects. 4. Algorithms for Vehicle Detection and Tracking There are a wide variety of algorithms generally available for detection and Tracking of target. Figure 10 shows the classification of detection and tracking algorithms. 4.1. Target Detection Background The basic idea behind a target detection algorithm is that sensor nodes are deployed within an area and the nodes determine whether or not a target has entered or is pres- ently within the area. Nodes usually determine if a target is present by detecting a change in some sort of signal, whether it is acoustic, light, temperature or some other type [5]. Since the strength of this signal will scatter throughout the sensor network the nodes need to collabo- ratively work together in order to determine if a target has been detected or not. Several of these collaborative detec- tion algorithms are discussed in the following section: 4.1.1. Basic Fusion This algorithm is presented first since it has an extremely simple design and implementation and serves as an ideal algorithm to use as the foundation for explaining other more complex detection algorithms. This algorithm col- lects the captured data from each of the nodes in a net- work. Then, to remove any invalid data provided by faulty nodes, the largest and smallest data values are dropped. The remaining data is then averaged together. If this average exceeds a predetermined threshold, then the  G. PADMAVATHI ET AL.179 system is notified that a target has been detected. This algorithm has two versions in which the data provided by each node differs. The data is either the original data col- lected by the node or it is a detection decision already made by the individual nodes using their original data [5]. 4.1.2. Hybrid This algorithm is similar to the basic fusion algorithm. In that a detection decision is based on data collected by nu- merous nodes throughout the network. However, this al- gorithm differs in that either a yes/no target present bit decision is sent or the collected data is sent. In this algo- rithm, each node is given two threshold values for a pre- viously determined detection signal type, such as sound. One of these threshold values determines that if the data collected by the node exceeds this value then a target has been detected. Correspondingly, the other threshold is a minimum in that if the data is below, then no target is pre- sent. If either of these two thresholds is met then a bit message indicating the presence or lack of a target is transmitted. However, if neither of these thresholds is ex- ceeded then the raw data collected by the node is passed on to the base station where it is used with the data of other nodes to determine if a target is present or not [18]. 4.1.3. Predicate Clustering In this algorithm nodes are divided into groups called clusters in which each group has a cluster head that all sub nodes of the cluster report their data to. Typically, one cluster is formed around a single target with multiple clusters being in the network if multiple targets are pre- sent. Cluster heads are chosen by all nodes within the area of a detected target “electing” to become the head by broadcasting their intent to become a cluster head. The node with the peak sensor reading is chosen as the cluster head [6]. Once cluster heads are chosen, the re- maining nodes choose group to join by running a deci- sion predicate on their captured sensor data and the data of their neighbours. One particularly interesting feature of this algorithm is that a cluster head can be responsible for multiple targets. When it is detected, multiple targets are going to enter the same cluster, both clusters provide the target information to the “merged” cluster head that is now responsible for tracking both targets. 4.1.4. Grids In this approach the sensor network is broken up into “virtual grids” where each grid contains points. For each grid point, it is determined which nodes’ sensing area covers the grid point and then these nodes create a schedule so that they all collaboratively cover this grid point at alternating times. So at any point of time‘t’ at least one node’s sensing area covers grid point ‘x’. Since each node covers multiple grid points, each node will contain several sensing schedules to keep in sync so that at any point of time all grid points are covered by at least one node. In order to do this, all nodes first determine the schedules for each grid point, then schedule all their in- dividual point schedules together so that each node is not constantly waking and sleeping instead sleeps a little and then wakes for a while. Once each node determines its own individual schedule, it must be correlated with those of its neighbours so that as few as possible nodes are awake at any point of time but all grid points are covered at all times. Once the schedules are completed for each node, the nodes start to follow their schedule, going through states of being asleep and awake in order to de- tect a new target [7]. 4.1.5. Wave The Wave protocol has the same goal in mind as that of the Grid algorithm, detecting targets while conserving energy by not having all the nodes on all the time. The basic idea of the wave algorithm is to wake up a series of nodes at certain times so that only nodes that are awake at one point of time are in one concentrated area. Then, over time, this section moves over the network by put- ting nodes to sleep and waking new ones. This gives the appearance of an awake section of nodes flowing over the entire network like a wave [8]. This algorithm proposes three types of waves: Two straight lines of nodes are awake at the same time, with the lines being parallel to each other. The two lines start on opposite sides of the network from each other and gradually work towards each other to meet in the centre of the network. A wide line of nodes are awake at the same time and this line moves across the network from one edge to the opposite edge. Waves of nodes are awake and the wave traverses from one edge of the network to the other. This approach differs from the wide line in that the boundary shape is curvy or wave like instead of being a straight line boundary. The wave is created by an awake sensor wak- ing all nodes within its communication range on the side of it that the wave needs transition too. This approach also differs from the previous two in that it uses radio communication to wake up the next nodes to start sens- ing instead of time syncing the movement of wake/sleep nodes across the network. Like the other algorithms, when a target is detected, the node(s) pass the information on for use. 4.1.5.1. Patrolling Patrolling algorithms are similar to the wave algorithms in that only a series of nodes are awake at one point of time. This algorithm just chooses which nodes to wake differently. This can be done on an on-demand basis or a coverage-orientated basis. The difference between the two is that on-demand is some predetermined path that is currently interesting whereas coverage-orientated just repeatedly watches an area [9]. Copyright © 2010 SciRes. WSN  G. PADMAVATHI ET AL. Copyright © 2010 SciRes. WSN 180 The algorithm for both approaches is the same. First, a patrol is defined as a set of information containing the patrol speed, duration, iteration period and path. Once this information is collected, a Patrol Host node is se- lected, which is usually the first node on the patrol path. The duty of the Patrol Host is to periodically transmit the patrol data along with the current patrol time. The idea is that over the time the patrol virtually traverses down the specified path. As the patrol advances, nodes that are closest to the patrol path wake up and collect information. Nodes determine if they are near the patrol path by using the patrol information that the Patrol Hosts broadcast. Additionally, as the patrol moves, new Patrol Hosts must be elected. As the patrol virtually moves out of the cur- rent patrol host’s range, a new patrol host is selected on the path which then takes over the patrol host duties and the previous patrol host can now sleep. This process of waking nodes and handing off patrol host duties contin- ues until the end of the path is reached. Once the path end is reached, the patrol is reversed in order to traverse the path back to the original starting point. This process continues according to the duration and iteration pa- rameters are set in the original patrol parameters [9]. 4.1.6. Mobile Nodes Until this point, all the target detection algorithms dis- cussed so far have assumed that the sensor nodes remain stationary. This section looks at a few target detection algorithms in which the nodes are mobile within the network. Even though these algorithms allow nodes to be mobile, their goal remains the same as the previously mentioned target detection algorithms. These algorithms are still trying to detect targets in a timely and efficient manner while trying to cover as much of the network as possible using as little energy as possible. The theory behind allowing nodes to be mobile is that they may now detect a target that would have otherwise gone unde- tected in a stationary node network [10]. 4.1.6.1. Past Detections Like other algorithms, the network in this algorithm is divided into cell areas. Each cell is unique in that it maintains the current state and past history of targets that have been in the cell. This includes the location in which the target was first detected within in the cell. Using this data, the system calculates the areas of the cell that are most likely to contain a target based on the locations of previously detected targets [11]. Once these locations are determined, each node is as- signed an area to watch and a priority. These priorities are used in the “coordination mechanism” part of the algorithm. The coordination part of the algorithm is re- sponsible for altering the path nodes so that their obser- vation paths overlap as little as possible. For example, the node that watches the area where targets are the most likely to occur is given the highest priority of the system and its path is not altered. A second node, whose priority is slightly less than the first node, whose path also slightly intersects that of the first node has its path al- tered so that the two paths will not cross. This path alter- ing continues throughout the system from highest prior- ity down to lowest priority until all node paths are altered to prevent too much overlapping of observation areas [11]. 4.1.6.2. Collaborative Coverage This algorithm is little different in that the paths the nodes traverse are not coordinated in any way. Each node is allowed to create and follow its own arbitrary path. While the node is travelling on this path at different locations and times, it collects data and saves. The sensed data are saved with time and location details [12]. While the nodes move across their paths they share their collected data with those nodes they come into radio communication with. Data is usually shared on a request basis. Each node is provided a coverage threshold and confidence threshold. Actual target detection in this sys- tem is determined by examining the data taken at several points that are close to each other. If the combined data collected by this group of close points exceeds some predetermined threshold then it is determined that a tar- get is detected at this area. Note that the value of this detection threshold will determine how sensitive/ insen- sitive the system is at detecting targets. 4.1.6.3. Bayesian Estimation Track Before Detect (TBD) Estimator Integrated tracking and detection, based on unthresh- olded measurements, also referred to as Track Before Detect (TBD) is a hard nonlinear and non-Gaussian dy- namical estimation and detection problem. However, it is a technique that enables the user to track and detect tar- gets that would be extremely hard to track and detect, if possible at all with ‘‘classical’’ methods. TBD enables one to be better able to detect and track weak, stealthy or dim targets in noise and clutter. The particle filters have shown to be very useful in the implementation of TBD algorithms. In TBD, the detection problem is done using the track output over multiple scans. The detection decision will be made at the end of the processing chain, i.e., when all information has been used and integrated over time [15]. Although it is called track before detect, the tracking and detection processes occur simultaneously. In this way, the energy of a (weak) target is integrated and correlated over time and position. The concept will lead to a better performance when detecting and tracking weak targets. TBD also implicitly solves the problem with data asso- ciation. 4.2. Target Tracking Background Target tracking algorithms usually focus on the aspect of  G. PADMAVATHI ET AL.181 the sensor nodes’ interaction with a target after the target has already been detected within the area the sensor nodes cover. Once the object has been detected, the nodes collect information and then use one of many dif- ferent types of algorithms to calculate the current loca- tion of the object relative to the sensor nodes’ locations. From here, it is the goal of the sensor network to track the object as it moves through the network. This may or may not involve predicting the next location of the object when it moves. In order to forewarn those nodes it will be heading towards to prepare to capture data [14]. Sev- eral of these tracking algorithms are discussed in the fol- lowing section: 4.2.1. Simple Triangulation This algorithm is an extremely simple design and im- plementation and serves as an ideal algorithm to use as the foundation for explaining other more complex track- ing algorithms. The whole goal of this algorithm [14] is to provide a simple algorithm that uses simple computa- tion in order to calculate an object’s current location and predict where it is headed and notify those nodes near the predicted next location of the object. This algorithm first assumes that all nodes in the network are localized to a common reference point and can detect and estimate the distance to a target using signal strength [14]. When a node detects an object within its range it broadcasts a TargetDetected message. This message contains the location of the sensor node and the distance to the target. All nodes that hear this message store its data in their local memory. When a node that has detected the target hears two other Tar- getDetected messages from two other nodes it performs triangulation on the three coordinates to calculate the location of the target. (Note that this means that more than one node may perform this calculation for the same target at the same time.) This node then continues to project the trajectory of the target. When the esti- mated target trajectory has been calculated, all nodes that are within some distance ‘d’ perpendicular to the target’s trajectory are sent a Warning message to alert them that the target is headed towards them. These newly awoken nodes then track the object as it enters their area and repeat the TargetDetected and Warning message sending process. 4.2.2. Clusters The cluster target tracking algorithm has been widely discussed through many research papers. In this section, the basic idea of target tracking using clusters is dis- cussed, followed by an overview of the variances in each of the different cluster algorithm research papers. 4.2.2.1. Basic Cluster Algorithm The basic algorithm for tracking an object using clusters is as follows [20]: Some (or all) of the nodes in a cluster detect the object and report their data to a cluster head. Note that each cluster has only one cluster head. The cluster head node uses all the target detection information from the sensor nodes to estimate the tar- get’s location. The cluster head uses the calculated target location and past locations of the target to predict the next loca- tion of the target. Those sensors around the predicted location are woken up to form a new cluster (if not already in one) to detect the target. When the target is detected in this new cluster, the previous cluster’s nodes are all put into a sleep state. This new cluster then continues the cluster tracking algo- rithm. 4.2.2.2. Hierarchical Supernodes This algorithm deviates from the basic algorithm in that the cluster heads (called supernodes) have a higher communication range and more computational power [21]. These “supernodes” are distributed throughout the network and the otherwise normal nodes are assigned to supernodes. Clusters are not dynamically generated in this algorithm. Interestingly enough, supernodes do share target location information among each other, whereas regular sensor nodes do not. 4.2.2.3. Dynamic Clustering Like the supernode algorithm, this algorithm also as- sumes that cluster head nodes have more power than normal sensor nodes. However, sensor nodes are not assigned to clusters in this algorithm. Instead, they are invited to join a cluster by the cluster head. The cluster head does this by broadcasting a join message that in- cludes the time and signature of the target the cluster head detected [19]. Those sensor nodes that have stored data that matches the data in the broadcast message re- spond to the broadcast by sending their captured data to the cluster head node. Interestingly, the cluster head only waits for a certain number of replies and when the re- quired numbers of replies are received, the cluster head calculates the target’s location. Unlike the supernode algorithm, this algorithm has one active cluster head at a time. In other words, cluster heads do not work together [22]. 4.2.2.4. Cell Collaboration Like predicate clustering all nodes in this algorithm are of the same type. Nodes are formed into clusters (called cells) in which all nodes within the cells collaboratively decide when a target has entered their cell and if they should track it [22]. It is interesting to note that cells can have different sizes; the size of cells is determined by the observed velocity of the target. So cell size will increase for faster moving targets. Copyright © 2010 SciRes. WSN  G. PADMAVATHI ET AL. Copyright © 2010 SciRes. WSN 182 4.2.2.5. Probabilistic Localization This algorithm deviates even further from the previously discussed algorithms. Cluster heads are special high powered nodes that know the location of every node within their cluster [23]. This algorithm takes advantage of the fact that the cluster head knows these locations. When sensor nodes detect a target, they send a very small notification message to their cluster head and store the target location data, time and other relevant data in their local memory. Upon receiving several notifications, the cluster head performs a probabilistic localization al- gorithm to determine which sensor nodes to query saved data from. In other words, the cluster head runs an algo- rithm that helps to predict which sensor nodes are closest to the target. Therefore, the cluster head has the best data to calculate an accurate estimation of the target location. When the cluster head determines which nodes to query, they are asked for the data they saved in their local memory and the cluster head uses this information to calculate the location of the target. 4.2.2.6. Distributes Predictive Tracking This algorithm is very similar to the predicate localiza- tion algorithm in that cluster head knows the ID, location and energy level of each of the nodes within their cluster. However, not all nodes belong to a cluster. Nodes on the border of the network are not in a cluster and those are on sense at all times. Similarly, nodes next to the border are not in a cluster. Moreover the, cluster heads only choose 3 nodes from target tracking data. Cluster heads determine which 3 nodes to query based on their location in relation to the predicted target location calculated by a previous cluster [24]. When the cluster head has chosen which nodes to query, those nodes are woken up to pre- pare to detect the approachable target. This algorithm differs even further in that if a cluster head cannot find 3 suitable nodes within its own cluster, it can seek the help of neighbouring clusters and ask for one or more of their nodes to be turned on and report information. 4.2.3. Rooted Tree Related to the clusters tracking algorithm is the idea of the rooted tree tracking algorithm. This algorithm differs somewhat in that instead of having multiple cluster heads, there is only one head node and it is referred to as the root. The root node is the node that is closest to the target. When a new target location is predicted, if there is an- other node that is closer to that position than the current root then new node becomes the root. Other nodes around the root work together to form a tree in which their sensed data is collected and passed up through the tree (children to parents) until all data reaches the root [25]. When the root receives all the data it calculates the target position and predicts the new target position as mentioned in the basic target tracking algorithm. The tree itself is reconfigured on every root change. When a root change occurs, a “reconfigure” message is broadcast containing the location of the new root. When a node detects the “reconfigure” message, it detaches itself from the old tree and attaches itself to the new tree by recog- nizing its neighbour node that is closest to the new root node as its new parent. New data is then collected and passed up the tree for the new root to use. 4.2.4. Particle Filtering The basic idea behind a particle filtering tracking algo- rithm is that numerous object state descriptions are saved that contain data necessary to calculate the target posi- tion at a certain time. These state descriptions are re- ferred to as particles and each particle has its own weight. The weight of a particle determines how much the data it contains will contribute to the location estimation of an object. When new particles are created, the weights of the pre-existing particles are adjusted and then all the particles are used to calculate a new target location [26]. Eventually, particles with weights that are below a cer- tain threshold are eliminated as duplicate particles. Some of the particles filtering algorithms differ a little. Certain algorithms have all the particles stored in a cen- tral node and this node does all the target location proc- essing [28]. Other algorithms distribute the stored parti- cles across the network nodes. 5. Analysis of Algorithms This section analyses each target tracking algorithm mentioned with a focus on how it could be improved by combining it with one or more of the ideas presented in the target detection algorithms. 5.1. Simple Triangulation The main problem with this algorithm lies in the fact that when a node has detected a target and hears two other nodes broadcast the same target detection, the nodes starts to perform the triangulation localization calculation. This means that at the same point of time there will be multiple nodes calculating the same target location. This is a waste of computation and energy resources. This algorithm needs to be improved so that when a node starts to calculate the location of the target, it first broadcasts its intention to calculate the location to all the other nodes, similar to the data sharing that is done in the collaborative coverage mobile detection algorithm. Then all the other nodes that would have performed this same calculation will not perform it once they hear the broad- casted intention of the first node. 5.2. Basic Cluster The majority of the cluster algorithms had all the nodes on during their target detection phase. It would be better if they instead adopt a technique similar to that used in the wave detection algorithm to detect targets. Since each  G. PADMAVATHI ET AL.183 area of the network is already divided into clusters, each node within the cluster could take turns monitoring the area for the arrival of a target using one of the wave de- tection methods mentioned. This would increase the life- time of the network. However, using one of the mobile detection algorithms is not recommended since the nodes have to register with the cluster head. Depending on the mobile detection algo- rithm used, the nodes would constantly be moving in and out of clusters. This would cause an increase in the amount of message communications with these nodes in order keep track of the nodes within the cluster. Mobile detection algorithm of this type can be applied to the situation only if the mobility of the nodes is limited and the node always stay within the same cluster. Additionally, the cluster algorithms could benefit from the basic fusion detection algorithm. Once a target has been detected and all the information is passed to the cluster head the cluster head could use the technique used in the basic fusion algorithm to eliminate any data provide by faulty nodes. This would help make the net- work less vulnerable to faulty nodes. 5.2.1. Dynamic Clustering The biggest problem with this algorithm is that it will not work with mobile nodes. The network calculates the sensor node’s locations at start-up. Since these locations need to be known by the cluster head and are calculated only once, this prevents any nodes from moving or even being added to the network. This problem could be easily fixed by periodically refreshing the locations of the sen- sor nodes, although this will decrease the network’s life- time. So it is better to use a detection algorithm and con- stantly refreshing the nodes’ location isn’t an optimal solution is better in this case. 5.2.2. Cell Collaboration This clustering algorithm is already perfectly setup to use the grid detection algorithm for detection of targets. Since the nodes in this algorithm are already divided into cells, the basic structure to use the grid algorithm is al- ready in place. All that needs to be done is to add the grid algorithm for the detection part. Once, this is done the algorithm would be more efficient since the nodes would be alternating sleep schedules with each other in order to detect the target instead of all being awake at the same time. 5.2.3. Probabilistic Localization This algorithm already sounds like that it has incorpo- rated parts of the hybrid detection algorithm in it. When a target is detected, this algorithm sends a small mes- sage to the cluster head. Similarly, when a target is de- tected in the hybrid algorithm a small yes/no bit mes- sage is sent to the decision maker in the network, or cluster head. Then the cluster head uses this data to determine which nodes to query for further data. In de- termining which nodes to query, it would be a good idea to use an averaging technique similar to that used in the basic fusion detection algorithm in order to eliminate the impact of any data provided by a faulty node. The similarities to the hybrid algorithm continue. When the cluster head determines which nodes to query, the nodes respond back to the cluster head with more detailed information. However, this algorithm should not be combined with a mobile node detection algorithm because of the way it decides which nodes to query. In this algorithm, the cluster heads create probability tables in order to deter- mine which sensors to query [23]. The use of a table is acceptable until nodes move outside or are added to the system. When this happens, the probability table must be updated. Therefore, the use of a mobile detection scheme would cause a lot of additional computational overhead since these tables are to be constantly refreshed. 5.2.4. Distributed Predictive Tracking This algorithm is unique in that it is already doing its own target detecting. Instead of having the border nodes being on at all times to detect nodes it would be benefi- cial to have these nodes adopt a wave or patrol like tech- nique. This way, they would still detect targets but would be consuming a considerably smaller amount of energy. 5.3. Rooted Tree One of the basic problems with the rooted tree technique is that it doesn’t provide any fault tolerance facts. In or- der to make this algorithm less vulnerable to problems caused by faulty nodes, it should use an averaging tech- nique similar to that used in the basic fusion detection algorithm. Additionally, this algorithm encounters problems when the velocity of the target is very high. As the ve- locity of the target increases so does the number of times in which the tree must be reconfigured [25]. This will cause problems when a threshold velocity of the target is reached in which the tree can no longer be generated quickly enough to keep up with the moving target. This problem could be eliminated by altering this algorithm to work more like the patrolling algorithm. Instead of con- stantly rebuilding the tree, the tree is treated as a path that can have steps (or nodes) along the path added or deleted from it. This way when the target moves, just add a new node to the path and remove any one that is too far away to contribute any longer. The basic nodes needed to collect data are still members of the path and new ones are added. It saves an enormous amount of time and message communication needed to periodically rebuild the tree structure each time. Copyright © 2010 SciRes. WSN  G. PADMAVATHI ET AL. Copyright © 2010 SciRes. WSN 184 5.4. Particle Filtering In order to track targets, this algorithm saves an enor- mous amount of data in the form of particles. Over time, these particles take up a large amount of memory space. The amount of memory actually used could be decreased if this algorithm is to adopt the idea behind the TBD al- gorithm. Bayesian Estimation Track Before Detect (TBD) based on particle filtering gives high performance and hybrid detection algorithm stops recording data once the data it currently contains exceeds a threshold to know whether a target is present or not. The particle filtering algorithm could use the same principle. Once enough particle data is collected to exceed some threshold, the node would stop collecting data. This would not only decrease the amount of memory used but also decrease the amount of work to be done to save energy. 5.5. Evaluation of Target Detection and Tracking Algorithms The best algorithm is established based on the evaluation criteria. The parameters used for evaluation are time, energy, propagation delay, vulnerability, memory used, stability and scalability. Particle Filtering based on the Bayesian TBD estimator algorithm that sounds the best for vehicle detection and tracking in WSNs. Table 4 shows the evaluation summary. 6. Summary of Algorithms It is observed that, one of the best target detection and tracking algorithms is the combination of the Bayesian Estimation Track before Detect (TBD) Estimator and particle filtering algorithm. The fact that the TBD covers the network area in a short amount of time and enables nodes to sleep at times saves a huge amount of energy. This enables a target to be detected, without too much delay, in an energy efficient manner. The particle filtering algorithm is also on the right track since the pre-existing particles are adjusted when the new particles are created and hence particles with weights that are below a certain threshold are eliminated as duplicate particles, which also conserves energy. Ad- ditionally, the use of several central localization calcu- lating points instead of one helps to reduce the vulner- ability of the system to an attacker. It eliminates the one point of failure problem. It also shares the burden of en- ergy usage that one node would face across several nodes. Particle filtering approach allows all the nodes to share the energy burden. Hence particle filtering algorithm combined with Bayesian Estimation Track before Detect (TBD) Estimator algorithm can be used for target detec- tion and tracking. 7. Conclusions and Future Directions In this paper an attempt is made to gather the information about the unauthorized vehicle detection and tracking in the battlefield surveillance and also to survey the sensors that are widely available for vehicle detection. The effort is also set to survey and evaluate the detection and tracking algorithms intended for target (eg vehicle or animal) detection and tracking using Wireless Sensor Networks. An overview of each algorithm type was pre- sented. The combinations of target detection algorithms with target tracking algorithms are also discussed. The various combinations of algorithms have been classified and each category is evaluated according to the identified criteria. Particle Filtering based on the Bayesian TBD estimator algorithm is an interesting one for target detec- tion and tracking using WSNs. It has good resource effi- ciency, propagation delay is minimum. It also increases scalability and particle based approach increases stability. Real time experiments are required in order to conclude whether a Particle Filtering based on Bayesian TBD es- timator algorithm will work in a practical scenario. This paper aims to give a brief overview of sensors and algo- rithms used for Vehicle detection and tracking which directs the future researchers to show new directions used in battlefield surveillance or in any place where human monitoring is not possible. 8. Acknowledgment The authors would like to thank the Armament Research Board (ARMREB-DRDO) for supporting this Research project by funding. 9 . References [1] Y. C. Tseng, S. P. Kuo, H. W. Lee, and C. F. Huang, “Location tracking in a wireless sensor network by mo- bile agents and its data fusion strategies,” Lecture notes in computer science, SpringerLink, pp. 2–3, 2003. [2] E. Y. Luz and A. Mimbela, “Summary of vehicle detec- tion and surveillance technologies used in intelligent transportation systems,” The Vehicle Detector Clearing- house, Southwest Technology Development Institute (SWTDI) at New Mexico State University (NMSU), Fall 2007. http://www.nmsu.edu/traffic/. [3] S. Coleri, M. Ergen, and T. J. Koo, “Lifetime analysis of a sensor network with hybrid automata modelling,” Processings of ACM International Workshop on Wireless Sensor Networks and Applications (Atlanta, GA), pp. 98–104, 2002. [4] D. Jiagen, S. Y. Cheung, C. W. Tan, and V. Pravin, “Signal processing of sensor node data for vehicle detec- tion,” IEEE Intelligent Transportation Systems, pp. 70–75, 2004.  G. PADMAVATHI ET AL. Copyright © 2010 SciRes. WSN 185 [5] C. Thomas, K. S. Kewel, and R. Parameswaran, “Fault tolerance in collaborative sensor networks for target de- tection,” IEEE Transactions on Computers, pp. 320–333, 2004. http://citeseer.ist.psu.edu/clouqueur03fault.html. [6] F. Qing, Z. Feng, and L. Guibas, “Lightweight sensing and communication protocols for target enumeration and aggregation,” Proceedings of the 4th ACM international symposium on Mobile ad hoc networking & computing, pp. 165–176, 2003. [7] Y. Ting, H. Tian, and A. S. John, “Differentiated surveil- lance for sensor networks,” Proceedings of the 1st inter- national conference on Embedded networked sensor sys- tems, pp. 51–62, 2003. http://www.cs.virginia.edu/papers/ diff_surveillance_sn_p51-yan.pdf. [8] S. S. Ren, Q. Li, H. N. Wang, and X. D. Zhang, “Design and analysis of wave sensing scheduling protocols for object-tracking applications,” Lecture notes in computer science, SpringerLink, pp. 228–243, 2005. http://www.cs. wm. edu/~liqun/paper/dcoss05.pdf. [9] C. Gui and P. Mohapatra, “Virtual patrol: a new power conservation design for surveillance using sensor net- works,” Information Processing in Sensor Networks, pp. 246–253, 2005. [10] B. Y. Liu, P. Brass, O. Dousse, P. Nain, and D. Towsley, “Mobility improves coverage of sensor networks. inter- national symposium on mobile ad hoc networking & computing,” pp. 300–108, 2005. [11] M. K. Krishna, H. Hexmoor, and S. Sogani, “A t-step ahead constrained optimal target detection algorithm for a multi sensor surveillance system,” IEEE Intelligent Ro- bots and Systems, pp. 357–362 2005. http://arxiv.org/ ftp/cs/papers/0505/0505045.pdf. [12] K. C. Wang and P. Ramanathan, “Collaborative sensing using sensor of uncoordinated mobility,” Lecture notes in computer science, SpringerLink, pp. 293–306, 2005. http: //www.ece.wisc.edu/~wander/papers/dcoss05_wang.pdf [13] E. B. Ermis and V. Saligrama, “Adaptive statistical sam- pling methods for decentralized estimation and detection of localized phenomena,” ACM’05. http://iss.bu.edu/ srv/Publications/Manuscript-final.pdf. [14] R. Gupta and S. R. Das, “Tracking moving targets in a smart sensor network,” Vehicular Technology Confer- ence, pp. 3035–3039, 2003. http://www.cs.sunysb.edu/ ~samir/Pubs/VTC03-long.pdf. [15] S. J. Davey, M. G. Rutten, and B. Cheung, “A com parison of detection performance for several track-bef ore-detect algorithms,” EURASIP Journal on Advance s in Signal Processing, 2008, http://www.hindawi.com /journals/asp/2008/428036.html. [16] B. Tatiana, H. Wen, K. Salil, R. Branko, G. Neil, B. Travis, R. Mark, and J. Sanjay, “Wireless sensor net- works for battlefield surveillance,” Land Warfare Con- ference, 2006. [17] L. A. Klein, M. K. Mills, and D. R. P. Gibson, “Traffic detector handbook,” Operations and Intelligent Transpor- tation Systems Research, 2006. http://www.tfhrc.gov/ its/pubs/06108/index.htm. [18] L. Yu, L. Yuan, G. Qu, and A. Ephremides, “Energy- driven detection scheme with guaranteed accuracy” In- formation Processing in Sensor Networks, pp. 284–291, 2006. [19] W. P. Chen, J. C. Hou, and L. Sha, “Dynamic clustering for acoustic target tracking in wireless sensor networks,” 11th IEEE International Conference on Network Proto- cols (ICNP’03), November 2003. [20] D. Li, K. D. Wong, Y. H. Hu, and A. M. Sayeed, “Detec- tion, classification and tracking of targets in distributed sensor networks” IEEE Signal Processing Magazine, pp. 1163–117, 2002. [21] S. Oh and S. Sastry, “A hierarchical multiple-target tracking algorithm for sensor networks,” IEEE Robotics and Automation,” pp. 2197–2202, 2005. http://www.eecs. berkeley.edu/~sho/papers/icra05_hmttsn.pdf. [22] R. B. Richard, R. Parameswaran, and M. S. Akbar, “Dis- tributed target classification and tracking in sensor net- works,” In Proceedings of the IEEE, Vol. 91, No. 8, pp. 1163–1171, 2003. http://www-net.cs.umass.edu/cs791_ sensornets/papers/brooks.pdf. [23] Y. Zou, and K. Chakrabarty, “Target localization based on energy considerations in distributed sensor networks,” 1st IEEE Workshop Sensor Network Protocols and Ap- plications (SNPA’03), pp. 51–58, 2003. [24] H. Yang and B. Sikdar. “A protocol for tracking mobile targets using sensor networks, sensor network protocols and applications,” pp. 71–81, 2003. http://networks.ecse. rpi.edu/~bsikdar/papers/hua_icc03.pdf. [25] W. S. Zhang and G. H. Cao, “Optimizing tree reconfigu- ration for mobile target tracking in sensor networks,” In- focom, pp. 2434–2445, 2004. [26] G. Ing, “Distributed particle filters for object tracking in sensor networks,” Proceedings of the 3rd international symposium on Information processing in sensor networks pp. 99–107, 2004. |