Paper Menu >>
Journal Menu >>
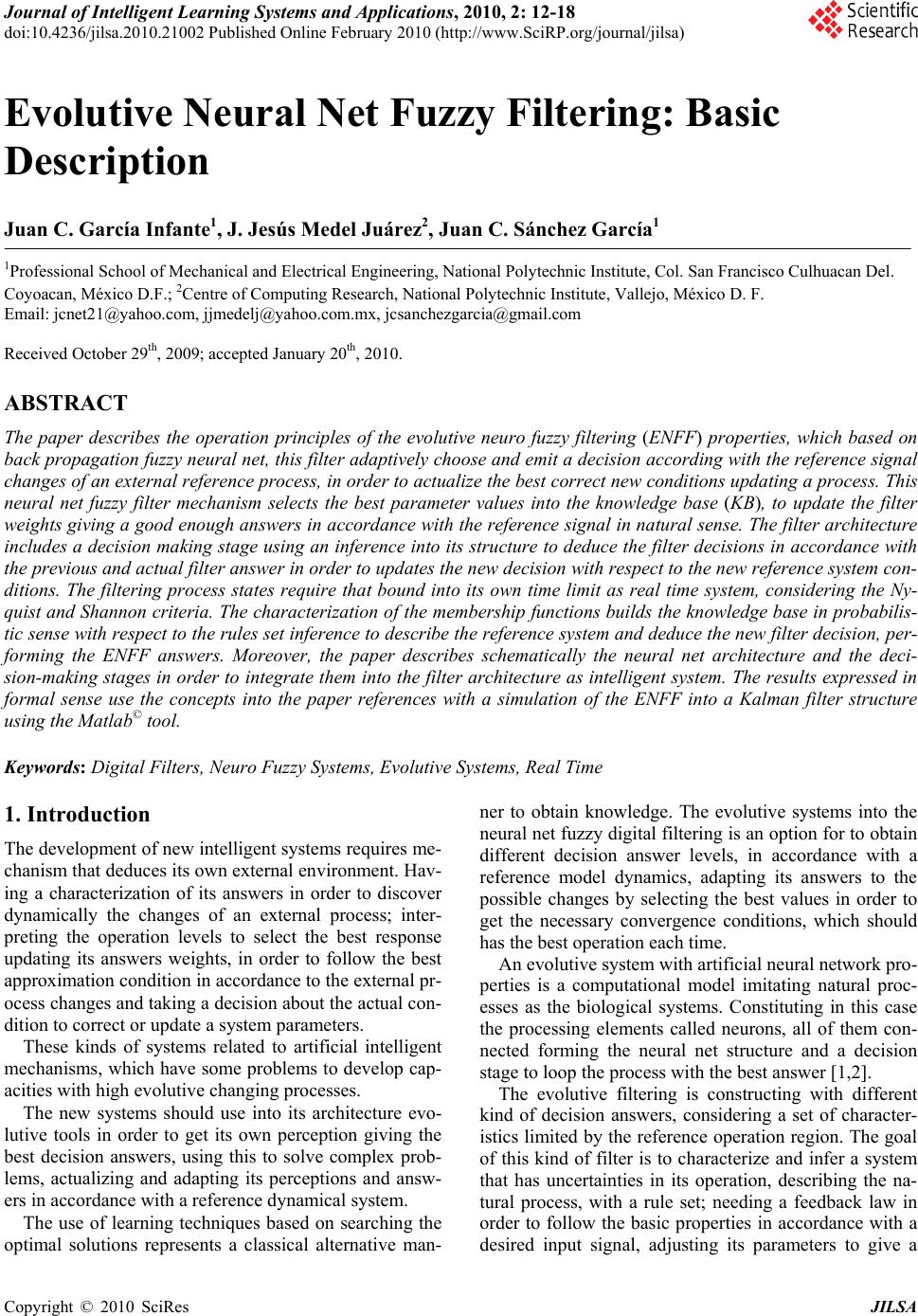 Journal of Intelligent Learning Systems and Applications, 2010, 2: 12-18 doi:10.4236/jilsa.2010.21002 Published Online February 2010 (http://www.SciRP.org/journal/jilsa) Copyright © 2010 SciRes JILSA Evolutive Neural Net Fuzzy Filtering: Basic Description Juan C. García Infante1, J. Jesús Medel Juárez2, Juan C. Sánchez García1 1Professional School of Mechanical and Electrical Engineering, National Polytechnic Institute, Col. San Francisco Culhuacan Del. Coyoacan, México D.F.; 2Centre of Computing Research, National Polytechnic Institute, Vallejo, México D. F. Email: jcnet21@yahoo.com, jjmedelj@yahoo.com.mx, jcsanchezgarcia@gmail.com Received October 29th, 2009; accepted January 20th, 2010. ABSTRACT The paper describes the operation principles of the evolutive neuro fuzzy filtering (ENFF) properties, which based on back propagation fuzzy neural net, this filter adaptively choose and emit a decision according with the reference signal changes of an external reference process, in order to actualize the best correct new conditions updating a process. This neural net fuzzy filter mechanism selects the best parameter values into the knowledge base (KB), to update the filter weights giving a good enough answers in accordance with the reference signal in natural sense. The filter architecture includes a decision making stage using an inference into its structure to deduce the filter decisions in accordance with the previous and actual filter answer in order to updates the new decision with respect to the new reference system con- ditions. The filtering process states require that bound into its own time limit as real time system, considering the Ny- quist and Shannon criteria. The characterization of the membership functions builds the knowledge base in probabilis- tic sense with respect to the rules set inference to describe the reference system and deduce the new filter decision, per- forming the ENFF answers. Moreover, the paper describes schematically the neural net architecture and the deci- sion-making stages in order to integrate them into the filter architecture as intelligent system. The results expressed in formal sense use the concepts into the paper references with a simulation of the ENFF into a Kalman filter structure using the Matlab© tool. Keywords: Digital Filters, Neuro Fuzzy Systems, Evolutive Systems, Real Time 1. Introduction The development of new intelligent systems requires me- chanism that deduces its own external environment. Hav- ing a characterization of its answers in order to discover dynamically the changes of an external process; inter- preting the operation levels to select the best response updating its answers weights, in order to follow the best approximation condition in accordance to the external pr- ocess changes and taking a decision about the actual con- dition to correct or update a system parameters. These kinds of systems related to artificial intelligent mechanisms, which have some problems to develop cap- acities with high evolutive changing processes. The new systems should use into its architecture evo- lutive tools in order to get its own perception giving the best decision answers, using this to solve complex prob- lems, actualizing and adapting its perceptions and answ- ers in accordance with a reference dynamical system. The use of learning techniques based on searching the optimal solutions represents a classical alternative man- ner to obtain knowledge. The evolutive systems into the neural net fuzzy digital filtering is an option for to obtain different decision answer levels, in accordance with a reference model dynamics, adapting its answers to the possible changes by selecting the best values in order to get the necessary convergence conditions, which should has the best operation each time. An evolutive system with artificial neural network pro- perties is a computational model imitating natural proc- esses as the biological systems. Constituting in this case the processing elements called neurons, all of them con- nected forming the neural net structure and a decision stage to loop the process with the best answer [1,2]. The evolutive filtering is constructing with different kind of decision answers, considering a set of character- istics limited by the reference operation region. The goal of this kind of filter is to characterize and infer a system that has uncertainties in its operation, describing the na- tural process, with a rule set; needing a feedback law in order to follow the basic properties in accordance with a desired input signal, adjusting its parameters to give a  Evolutive Neural Net Fuzzy Filtering: Basic Description13 correct solution dynamically. According to this, the filter chooses the best decision instruction to update the sys- tem. The neural net filter stage [3] works as a parallel fuzzy neurons in loop form, which has an iterative searching methodology used for evolutive algorithms and based on the back propagation (BP) algorithm since its parameters are updated dynamically ([4–6]) at each iteration by de- grees [7]. This process refers to a back propagation pa- rameter adaptation [8], using supervised learning by the knowledge base according with the error e(k) ([9,10]) de- scribed by the difference between the desired response y(k) and the actual signal [11]1. ky ˆ With this perspective, the paper integrates the ENFF concept with its real time restrictions [9], using statistical methods in order to characterize the Kalman filter inter- nal structure to give answers with respect to the operation levels in natural way making a specific decision in order to follow the natural reference model ([12,13]). 2. Filtering Stages The criterion described as the error minimization e(k)[3] describes the difference between the desired input y(k) and the actual output filter, allowing to find the co- rresponding membership function. Which is the best ap- proximation from the signal ky ˆ ky ˆ to y(k) in order to ad- just the parameters of the filter and get the correct answer describing the reference system path in order to take the decision into the decision stage. The error value e(k) sh- ould be close to γ with a limited interval [0, ] and is described as }, Zk:)(inf{ ike (i represents an in- dex, with k interval [14,15])2 Below, there is the stages description of the evolutive filtering, the first three stages are the inference mechanism; the stages d and e are the filtering process and the decision stage is the instruction decision: Input Inference: In this stage, the natural desired signal y(k) from the reference system to the input filter has a description in metric sense, is the first step of the inference mechanism [5]. Rule base: Dynamical rank intervals with respect to the input of the filter use the logical binary connector known as IF, representing the second step of the in- ference mechanism. Output inference: The expert action with respect to the rule base known as consequence uses the logical binary connector THEN to find the correct weight an- swer as ka ˆ called membership function is the third step of the inference mechanism. Filter algorithm: This is the filter stage, which ta- kes the digital answer, converted in a natural response. This is the closest distance value to the desired signal, based on the predefined knowledge base. Natural feedback: the filtering process takes the co- rrect linguistic value and feedbacks the filter parame- ters, updating its operation according to the natural evolution of the reference system considering the error differences between ky and ky ˆ dynamically and using a metric rank of the error functional kJ .3 Decision stage: Finally, the filter decision mecha- nism takes the best answer option according with the values of ky ˆ and 1 ˆky to actualize, the decisi- on described as kds. Each decision stage is in accordance with the actual and previous values of ky ˆ described as 1 ˆky do- ing a comparison between these values in order to select the corresponding instruction answer to the reference system, all the instruction answers are previously defined using the logic connectors IF-AND-THEN the filter se- lects the corresponding instruction to actualize the refer- ence system conditions. Figure 1, shows the filter architecture interacting with a reference process to describe its operation and take a decision instruction. 3. Filtering Description The evolutive neural net fuzzy filter (see: Figure 1) re- quires a knowledge base (KB); because, it has all the pos- sible responses in accordance with the reference system or process in which the filter is interacting. The evolutive by neural net fuzzy filter has its state variables bounded by a 1 is a fuzzy value. ),( ˆ )(:)( kykyke 2Inf is the greatest lower bound error value into the error set. 3The functional kJ describes the convergence relation among the real observed and its estimation; symbolically in recursive form: 2 1 22 )1(kJ )()1( 1 )( kek Figure 1. Evolutive neural net fuzzy filter process k kJ Copyright © 2010 SciRes JILSA  Evolutive Neural Net Fuzzy Filtering: Basic Description 14 rank of values described by fuzzy sets (for example, the temperature classified by the fuzzy logic as high, me- dium or low ([3,8,17,18]). This kind of filter adaptively modifies its response according to the dynamic changes at the filter de- sired input y(k) from the reference process alteration (pr- oduced by neural excitation). It requires that the error loop inference (comparison between desired input y(k) and actual output changes the filtering responses using the knowledge base (KB) with real time conditions (see: [4,6,9]). ky ˆ ky ˆ The filter classifies its different operation levels by membership functions, based on the error minimum fun- ction Jmin to give a corresponding near specific answer for each kind of desired input y(k) limited by the error dis- tribution function, which is also limited by γ. The classi- fication of the reference system responses realized by the filter is by the error distribution function considering di- fferent levels of response (membership functions), each level delimited by specific metrics bounded all into the error distribution region. This classification represents th- e characterization of the reference process operation in interaction with the filter ([14,19]). Using this kind of filters avoids the initial instability of the error convergence because it has all information re- quired and limited by an interval into a distribution re- gion as supervised learning technique. To do a classification of the membership functions the filter uses an error criterion function using metric inter- vals to delimit its operational levels. The membership function set established inside a distribution function co- rresponding to the error criterion; this classification with several membership functions is in accordance to each error interval (as operation linguistic levels). Respect to Figure 1, is an input natural linguis- tic value from the reference process interacting with the filter. is the control area, which include all the fil- tering processes corresponding to one iteration of a pr- ocess set, in order to obtain an output response ku kT ky ˆ. The desired signal described as ky is the fuzzy natural re- ference variable given by the reference system. ke is a fuzzy value where the set Z i,0: ii has 0,}inf{ i and the1,} i sup{ , [5] with * that must be the minimum value between y(k) and ; both values should be almost equal; in other words, is the difference between , and ky ˆ e k ky ˆ ky , being this the criterion distance in order to select the membership function for each case1. 4. Fuzzy Neural Net Structure The ENFF architecture is develop in order to work as neural net using back propagation properties ([11,19]). This characterizes the operational linguistic levels of the desired variable set {y(k)}, expressing as a basic estima- tion result5, in accordance with the inference rules with respect to the error value criterion selecting the cor- responding membership function. )k(a ˆ The neural net conditions are [1]: The desired input y(k) represents fuzzy labels, and each one has different operation levels. The input inference recognizes the variable type (A, B or C). The weights required for the internal adaptive ad- justments into the filter architecture, to get a correct response described as membership functions, rene- wing the values of )k(a ˆparameter using the knowledge base. The connection into the filter according to the error differences1 has a minimum operation criterion, se- lecting the membership function based on the mini- mum cost of the filter response to update its wei- ghts. It uses supervised learning into the knowledge base, therefore, the neuron has previously all the infor- mation included inN T. The decision stage compares the previous output and the actual value of the filter to select a instruc- tion decision [7]. Globally, according to Figure 2, the filter has four neural layers: The first layer with Zpnnp ,, y ˆ input neurons rep- resenting a set of desired inputs {y(k)}, a single hidden layer with p processing units in which the inference me- chanism operates in order to find the respective mem- bership function; the output{}, that is the an- swers set of the neural process (see: Figure 2). The filter has a decision stage layer as evolutive condition in order to give control instructions for an external process ac- cording with the previous filter answers. )k(a ˆ k The neurons architecture are simple processors, which get information from the first input layer from the outside world as desired signal }{ ky to the next neurons into the hidden filter layer. The neural net structure proceed the result of their previous processing step to nodes in the next higher lay- ers in order to obtain the nearest desired signal value of ky at the filter output ky ˆ. In consequence the deci- sion stage in the top-layer communicate their decision results to the outside world as , which its instruc- tions bounded inside the external reference process op- eration in order to give the best control value. kds Subsequently, using rules the fuzzy system performs the classification in both stages: filtering and decision; its Copyright © 2010 SciRes JILSA  Evolutive Neural Net Fuzzy Filtering: Basic Description15 rules are generated automatically by the evolutive neural net fuzzy filtering evaluating features which are difficult to extract or to evaluate directly delimited by the filtering criterion. The neural net represents a set of services, activating a specific neuron means the use of specific service with different levels of response. The filter requires a variable value according to the inference classification of the de- sired signal set, according to the changes of the error rank e(k) per iteration, one neuron is activating; next it- eration the filter could renew the neuron or only change its value by degrees. The value of y(k) defines a neuron to activate or to se- lect, in order to use its own set of operation levels (membership functions by degrees) to give the corre- sponding value of , and gives a correct natural answer [2]. )k(a ˆ 5. Rule Base Strategy This kind of filtering has operational properties defined by the rules base to learn, recall, associate and compares the new information delimited before according to the error variance limits predefined. The fuzzy rules condi- tions established as logical connectors (IF-THEN) con- stitute the rules base with respect to the error intervals and its respective response described as membership fun- ction. The rules generated constitute the inference of the de- sired signal5 as the logical connector IF, and the logical connector THEN selecting automatically the pa- rameter weighs of according to the knowledge ba- se ([18,20]): ky )( ˆka The KB has an automatic classification of the filter conditions: having the knowledge of the filtering opera- tion levels. In addition, selects the corresponding mem- bership function (value of ) of the knowledge base, adapting its responses weighs to give a correct answ- er , near to. )( ˆka ky ˆ ky A rules base filter characterized by a set of desired signals at the filter input, classified by intervals delimited previously into the error difference in order to select the corresponding membership function, which has the corresponding value giving a correct response seeking the closest distance to: }{ ky )( ˆka ky ˆ ky N kN kykyT 1 ))}( ˆ ),({( (1) In addition, mathematically correspondence of ky and , expressed with respect to the second probabil- ity moment, has the infimum value, described as: ky ˆ N NyyJJ ) ˆ ,(mininf0min Figure 2. Evolutive neural filter layers (L-low, M-medium, H-high) The rules set constitute a simple filter operation, based on the error set {e(k)} as limit indicator of the corre- sponding membership function set to adapt the parameter dynamically. The decision stage described as selects the best in- struction answer to control a process according with the filter answer, and its previous value, with the decision inference mechanism by fuzzy rules. For the decision stage, which is the finally inference of the evolutive neural net fuzzy filter, using a set of fuzzy rules to get the correct control instruction from its own knowledge base (KB). First, consider the value level and its previous value as the actual environment and select the corresponding condition or strategy from the knowl- edge base to loop an external process as. To describe the decision stage mechanism, we use fu- zzy rules to infer and select the corresponding value with If-then rules; the filtering system selects and gives a spe- cific instruction answer as in order to update and improve the control instruction performance minimizing the error process, in accordance with the fuzzy rule structure will have: If value is____ and value is____ Then value is ____. This filter (ENFF) has two knowledge bases, one for to select the parameter (as in Figure 1) and the second used for the decision stage to select the instruction an- swer (as in Figure 3). The Figure 3 illustrates the decision stage mechanism as fuzzy rules as: (2) Figure 3. Decision stage inference Copyright © 2010 SciRes JILSA  Evolutive Neural Net Fuzzy Filtering: Basic Description 16 6. Real Time Scheme DEFINITION 1 The real time properties of an evolutive neural net fuzzy digital filter, which is an adaptive filter performed according to ([6] and [10]): To take and to emit signals with fuzzy information into intervals limited in accordance to the reference process response according to the stability criteria ([5,6]). To take and to emit information through semi-open time intervals, synchronized with the process evolu- tion time, described in a relative way by semi-open time intervals, considering the criteria into refer- ences [15,21,22]. A membership functions group forms a control area, according to the properties considered in a) and b) points, respectively ([18,20,23]) . A set of fuzzy rules builds the knowledge base ac- cording to the fuzzy desired signal from the refer- ence model)(ky , obtaining a specific filter answer )( ˆky([16,20]). The adaptation algorithm updates the filter coeffi- cients according to the selected membership func- tion respectively to the established error criterion symbolically expressed as* . The decision stage mechanism selects the best in- struction answer as )k(ds , in order to perform the external process operation at each time. The knowledge base has all information that the filter requires to adjust its gains in optimal form and gives an answer accomplishing the convergence range, inside of the time interval (indexed with) in agreement wi- th the Nyquist sense, without loss of the stability pro- perties [6,20,23]): Zk ky is a measurable variable classified in metric ranks as degrees in linguistic sense (described into a state space variable bounded symbolically into linguistic natural expressions as high, medium or low values), kT is the control area described in pairs formed by ky ˆ and ky limited in time interval (has a velocity change bounded in the sense exposed by [11]), ke is the fuzzy value defined by the difference among ky ˆ and ky , which is bounded by the set Zi i,0: i , with ,}inf{ * i such that 0 * , ,}sup{ * i 1 * , means that ky ˆ is approximately equal to ky metrically speaking as linguistic variables, both are the same natural value. kds is the instruction answer of the filter acc- ording with the output of the filter ky ˆ and its previous value in fuzzy sense, to selects the corre- sponding candidate function classified in probabil- istic sense into a knowledge base to update an ex- ternal process into a new condition. 6.1 Local and Global Description DEFINITION 2 An ENFF in local and global temporal sense has quality of response according to the conver- gence criterion1 with respect to the real time conditions [15]. Global characteristics: The convergence intervals de- fined by ,0 with measures up to zero through er- ror functional J(k) considering and the convergence rela- tion1, temporally parameterized to the membership func- tion according to the linguistic variables values ([3,24]), without loss that /e(k)/<1 in agreement to [6]. According to the evolutive neural net fuzzy concepts, the global characteristics specified in stochastic sense according to [15], where }inf)(JmJ ~ min{ k(see: (2)), with kk JJ } ~ { and ,1)J ~ (Pk without loss that its natural evolution described by [22]: 1 maxmin f5.0 (3) 7. Simulations For the simulation of the ENFF, in this case we use the Kalman filter structure to integrate the filter stages, with a transition matrix described by the knowledge base in accordance to the error functional criterion [5]. The evo- lution times into a soft system integrated in a PC with AMD Sempron processor 3100+ with k intervals, having a mean evolution time of 0.004 sec ± 0.0002 sec. The basic reference system in discrete state space ex- pressed by the first order difference, as: )k(w)k(x)k(a)1k(x (4) In accordance with the system (4) the output is: 1n R)k(v),k(w),k(x :)k(v)k(x)k(y (5) 4Sup is the least upper bound of a partially ordered set 5The desired signal commonly has the basic and explicit description as , where is known as stability pa-where: {x(k)}= is the set of internal states, {a(k)}= is the parameters sequence, {w(k)}= is the noise set system perturbation, {y(k)}= is the set of desired signal from the system reference, v(k)= is the output noises. )()1()()( kkykaky rameter (see: [12] and [10]), k a )(k is the perturbation output noise, )(ky is the desired reference signal. Copyright © 2010 SciRes JILSA  Evolutive Neural Net Fuzzy Filtering: Basic Description17 There are different operation levels described in prob- ability sense in order to match with the functional error1 limit, in accordance with the desired signal y(k) and the Kalman filter answer. The filter operation bounds into the second probability moment, establishing the fil- ter classification as linguistic natural variables expressed as low, medium and high levels. ky ˆ According to the parameter selected by the rule strategy, the Figure 4 shows the output answer ka ˆ ky ˆ of the filter with respect to the desire signal y(k) at the input filter: Figure 5 shows the decision stage process to obtain the instruction answer as according with the kds ky ˆ values and its previous stage described as: 1ky ˆ The evolution time is less than the reference process proposed as 0.092 sec., satisfying the condition described in (3). The Figure 6 shows the decision stage as linguistic levels according with the filtering process in order to give different decision answers level described as DA#: The global convergence time of the filter is 0.08 sec, which is less than the evolution condition of the system, known as system maximum evolution time, oscillating around 0.092 sec. Figure 7 shows the functional described as J(k) with respect to the filter: 8. Conclusions The paper was about the analysis of the evolutive neural net fuzzy filtering and its real time conditions, in order show the applicability conditions into dynamical systems. The paper describes the adaptive inference mechanism that classifies and deduces the filter answers by the error value as limit, in order to search the adaptive weights and update its parameters to give a correct response dynami- cally as a natural linguistic answer. Figure 4.Estimation in accordance with ky ˆ ka ˆ value and reference ky Figure 5. Decision answer kds with respect to ky ˆ and 1ky ˆ Figure 6. Decision answer as linguistic levels (DA) Figure 7. Parameter of convergence illustratively by the functional J(k) * The paper establishes how to construct and character- ize the membership functions of the knowledge base in a probabilistic manner with the decision rules set, making a Copyright © 2010 SciRes JILSA  Evolutive Neural Net Fuzzy Filtering: Basic Description Copyright © 2010 SciRes JILSA 18 description of the real time conditions that the evolutive neural net fuzzy filter (ENFF) has to perform, which architecture works as a neural net. The filter has a final decision stage in accordance with the filter operation making a fuzzy inference between the actual and previ- ous filter answers in order to select the corresponding decision answer value. The results are in formal sense and described using the definitions considered in the papers referenced here. Fi- nally, this work showed a simulation of the ENFF opera- tion using the Matlab tool and the Kalman filter struc- tureto integrate the evolutive properties, considering five decision answers into the decision stage, having an accu- rate filtering time response with respect to the reference system in accordance with the real time properties pro- posed in this work. 9. Acknowledgments The authors thank the sponsors for the support of this work: Conacyt and National Polytechnic Institute (IPN). REFERENCES [1] C. Piotr, “Evolution fuzzy rule based system with param- eterized consequences,” International Journal of Applied Mathematics and Computer Science, Vol. 16, No. 3, pp. 373–385, 2006. [2] F. Yamakawa, “Fuzzy neurons and fuzzy neural networ- ks,” 1989. [3] S. Abdul, “Fuzzy logic and its uses,” http://www.doc.ic. ac.uk. [4] H. S. Ali, “Fundamentals of adaptive filters,” Complex Systems, 2003. [5] R. Ash, “Real analysis and probability,” Ed. Academic Press, USA, 1970. [6] S. Haykin, “Adaptive filtering,” Prentice Hall, 2001. [7] G. Huang, K. Zhu, and C. Siew, “Real-time learning ca- pability of neural networks,” IEEE Transactions on Neu- ral Networks, Vol. 17, pp. 863–878, 2006. [8] B. Rajen and M. Gopal, “Neuro-fuzzy decision trees,” International Journal of Neural Filters, Vol. 16, pp. 63–68, 2006. [9] J. García, J. Medel, and J. Sánchez, “Real-time neuro- fuzzy digital filtering: Approach,” Computer and Simula- tion in Modern Science, WSEAS press selected papers, Vol. 1, 2008. [10] J. Medel and P. Guevara, “Caracterización de filtros digi- tales en tiempo-real para computadoras digitales,” Com- putacióny Sistemas, Vol. 7, No. 3, 2004. [11] J. Medel, J. García, and J. Sánchez, “Real-time neuro- fuzzy digital filtering: Basic concepts,” WSEAS Transac- tions on Systems and Control, Vol. 8, No. 16, 2008. [12] J. García, J.Medel, and L. Guevara, “RTFDF description for ARMA systems,” WSEAS International Conferences, Canada, 2007. [13] D. Marcek, “Stock price forecasting: Statistical, classical and fuzzy neural networks,” Modeling Decisions for Arti- ficial Intelligence, Springer Verlag, pp. 41–48, 2004. [14] M. Margaliot and G. Langholz, “New approaches to fuz- zy modeling and control design and analysis,” World Sci- entific, 2000. [15] G. Morales, “Introducción a la lógica difusa,” Cinvestav- IPN, 2002. [16] T. Amble, “Logic programming and knowledge enginee- ring,” Addison Wesley, 1987. [17] J. Smith and A. Eiben, “Introduction to evolutionary com- puting,” Springer, 2003. [18] T. Takagi and M. Sugeno, “Fuzzy identification of sys- tems and its applications to modelling and control,” IEEE Transactions and Systems, Man, and Cybernetics, Vol. 15, pp. 116–132, 1986. [19] G. Huang, K. Zhu, and C. Siew, “Real-time learning ca- pability of neural networks,” IEEE Transactions on Neu- ral Networks, Vol. 17, pp. 863–878, 2006. [20] L. Zadeh, “Fuzzy sets,” Information and Control, Vol. 8, pp. 338–353, 1965. [21] K. M. Passino, “Fuzzy control,” Addison Wesley, 1998. [22] M. Shannon, “A mathematical theory of communication,” Bell Systems Technical Journal, Vol. 27, pp. 379–423, 623–656, 1948. [23] E. Mamdani, “Applications of fuzzy algorithms for con- trol of simple dynamic plant,” Proceedings IEEE, Vol. 121, pp. 1585–1588, 1974. [24] M. Montejo, “Lógica difusay control difuso,” 2006, http: //www.redeya.com. |