Applied Mathematics
Vol.4 No.2(2013), Article ID:28209,5 pages DOI:10.4236/am.2013.42052
A Weaker Constraint Qualification of Globally Convergent Homotopy Method for a Multiobjective Programming Problem
1Department of Mathematics, Clarkson University, Potsdam, USA
2Department of Mathematics, Harbin Normal University, Harbin, China
Email: gyao@clarkson.edu, wsong218@yahoo.com.cn
Received September 29, 2012; revised January 9, 2013; accepted January 16, 2013
Keywords: Multiobjective Programming Problem; Homotopy Method; KKT Condition; Efficient Solution; MFCQ
ABSTRACT
In this paper, we prove that the combined homotopy interior point method for a multiobjective programming problem introduced in Ref. [1] remains valid under a weaker constrained qualification—the Mangasarian-Fromovitz constrained qualification, instead of linear independence constraint qualification. The algorithm generated by this method associated to the Karush-Kuhn-Tucker points of the multiobjective programming problem is proved to be globally convergent.
1. Introduction
Let  be the
be the ![]() -dimensional Euclidean space, and let
-dimensional Euclidean space, and let  and
and  denote the nonnegative and positive
denote the nonnegative and positive , respectively. For any two vectors
, respectively. For any two vectors  and
and  in
in , we use the following conventions:
, we use the following conventions: . Similarly, we can define
. Similarly, we can define , and
, and .
.
Consider the following multiobjective programming problem (MOP)
where

We assume that all  and
and  are twice continuously differentiable functions, where
are twice continuously differentiable functions, where 
Let
It is well known that if ![]() is an efficient solution of (MOP), under some constraint qualifications, such as the Kuhn and Tucker constraint qualification (see Ref. [2]) or the Abadie constraint qualification (see Ref. [3]), then the following Karush-Kuhn-Tucker (KKT) condition at
is an efficient solution of (MOP), under some constraint qualifications, such as the Kuhn and Tucker constraint qualification (see Ref. [2]) or the Abadie constraint qualification (see Ref. [3]), then the following Karush-Kuhn-Tucker (KKT) condition at ![]() for (MOP) holds (see Refs. [4,5]):
for (MOP) holds (see Refs. [4,5]):
 (1)
(1)
where  and
and

We say that ![]() is a KKT point of (MOP) if it satisfies the KKT condition.
is a KKT point of (MOP) if it satisfies the KKT condition.
Since the remarkable papers of Kellogg et al. (Ref. [6]) and Chow et al.(Ref. [7]) have been published, more and more attention has been paid to the homotopy method. As a globally convergent method, the homotopy method (or path-following method) now becomes an important tool for numerically solving nonlinear problems includeing nonlinear mathematical programming and complementarily problems (see Refs. [3,4]).
In 1988, Megiddo (see Ref. [8]) and Kojima et al. (see Ref. [9]) discovered that the Karmakar interior point method was a kind of path-following method for solving linear programming. Since then, the interior path-following method has been generalized to convex programming, and becomes one of the main methods for solving mathematical programming problems. Among most interior methods, one of the main ideas is numerically tracing the center path generated by the optimal solution set of the so-called logarithmic barrier function. Usually, the strict convexity of the logarithmic barrier function or nonemptiness and boundedness of the feasible set (see Ref. [10]) are needed. In 1997, Lin, Yu and Feng (see Ref. [11]) presented a new interior point method—combined homotopy interior point method (CHIP method)—for convex nonlinear programming without such assumptions. Subsequently, Lin, Li and Yu (see Ref. [12]) generalized CHIP method to general nonlinear programming where, instead of convexity condition, they used a more general “normal cone condition”.
In 2003, Lin, Zhu and Sheng (see Ref. [13]) generalized CHIP method to convex multiobjective programming(CMOP) with only inequality constraints. Instead of (CMOP), they considered an associated non-convex nonlinear scalar optimization problem and constructed the homotopy mapping.
In Refs. [1,14], we considered a combined homotopy interior point method for the multiobjective programming (MOP) under the condition linearly independent constraint qualification (LICQ). To find a KKT point of (MOP), we construct a homotopy as follows
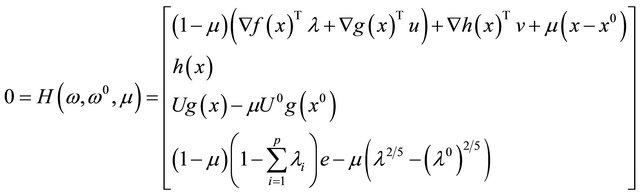 (2)
(2)
where ![]()


Let

Let  be a nonempty closed set and
be a nonempty closed set and . We recall that the Fréchet normal cone of
. We recall that the Fréchet normal cone of  at
at ![]() is defined as
is defined as
We used the following basic assumptions which are commonly used in that literature:
(A1)  is nonempty (Slater condition) and bounded;
is nonempty (Slater condition) and bounded;
(A2) (LICQ)  the matrix
the matrix

is a matrix of full column rank;
(A3) Normal condition:

It is well known that if condition (A2) holds, then
 (3)
(3)
We have proved the following convergence result in Ref. [1].
Theorem 1.1 (Convergence of the method) Suppose  and
and  are twice continuously differentiable functions such that the conditions (A1), (A2), and (A3) hold. Then for almost all
are twice continuously differentiable functions such that the conditions (A1), (A2), and (A3) hold. Then for almost all

the zero-point set  of the homotopy map (2)
of the homotopy map (2)
contains a smooth curve 
which starts from  As
As  the limit set
the limit set
 of
of  is nonempty, and the
is nonempty, and the
![]() component of every point in
component of every point in ![]() is a KKT point of (MOP).
is a KKT point of (MOP).
Recently, many researchers extended and improved the results in Ref. [1] to convex multiobjective programming problem, see Ref. [14-17]. The purpose of this paper is to show that Theorem 1.1 remains true under the condition MFCQ instead of LICQ. The paper is organized as following. In Section 2, we prove the existence and convergence of a smooth homotopy path from almost any interior initial point  to a solution of the KKT system of (MOP) under the condition MFCQ.
to a solution of the KKT system of (MOP) under the condition MFCQ.
2. Main Results
We need the following elementary condition.
(A2′) (MFCQ) For every  the following conditions hold:
the following conditions hold:
•  are linear independent;
are linear independent;
• there exists a  such that
such that
 and
and 
Clearly, condition (A2) implies (A2′). It is also known that if (A2′) holds, then (3) remains valid.
By using an analogue argument as in Ref. [1], we can prove the following two theorems.
Theorem 2.1 Suppose that  and conditions (A1), (A2′) hold. Then for almost all initial points
and conditions (A1), (A2′) hold. Then for almost all initial points
 is a regular value of
is a regular value of ![]()
and  consists of some smooth curves. Among them, a smooth curve, say
consists of some smooth curves. Among them, a smooth curve, say  starts from
starts from 
Theorem 2.2 Suppose that  and conditions (A1), (A2′) hold. For a given
and conditions (A1), (A2′) hold. For a given  if 0 is a regular value of
if 0 is a regular value of![]() , then the projection of the smooth curve
, then the projection of the smooth curve  on the
on the ![]() component is bounded.
component is bounded.
We next prove that  is a bounded curve.
is a bounded curve.
Theorem 2.3 (Boundedness) Suppose that the conditions (A1), (A2′), and (A3) hold. Then for a given
 if 0 is a regular value of
if 0 is a regular value of![]() , then
, then  is a bounded curve.
is a bounded curve.
Proof: By Theorem 2.2, it is sufficient to show that the  component of smooth curve is bounded. Suppose that there exists a sequence
component of smooth curve is bounded. Suppose that there exists a sequence 
such that

and
where  Since closed unit circle of
Since closed unit circle of  is compact, without loss of generality we can assume that
is compact, without loss of generality we can assume that
Clearly,  By (2), we have
By (2), we have
 (4)
(4)
 (5)
(5)
Let
By (5), we know 
Rewrite (4) as
 (6)
(6)
Divide (6) by  and let
and let  since
since
 , (6) becomes
, (6) becomes
 (7)
(7)
where
1) If  then
then  By
By
(A2′),  This is a contradiction with
This is a contradiction with .
.
2) If  we consider the following two cases:
we consider the following two cases:
1. If , we know
, we know  because of
because of  By (A2′), there exists a nonzero vector
By (A2′), there exists a nonzero vector  such that
such that
 (8)
(8)
This, together with (7), implies that  which is a contradiction.
which is a contradiction.
2. If , by (7) and (A2′), we know
, by (7) and (A2′), we know  So,
So,
 since
since 
Because of (5),  Thus
Thus

Without loss of generality, we can assume that
Hence 
a) If , then
, then  is bounded. We may assume
is bounded. We may assume  Divide (6) by
Divide (6) by  and let
and let
 (6) becomes
(6) becomes
 (9)
(9)
This implies that
exists. Indeed,
If
that is
By condition (A3),  This is impossible since
This is impossible since . So
. So
By (9), we then have that  exists. Assume
exists. Assume 
Then 
If , (9) becomes
, (9) becomes
This contradicts to condition (A3).
If , (9) becomes
, (9) becomes
By (A2′), there exists a nonzero vector  such that
such that

Thus  which contradicts
which contradicts 
b) If , without loss of generality, we can assume that
, without loss of generality, we can assume that
where  Since
Since
 (10)
(10)
we divide (4) by  and let
and let 
we have that
 (11)
(11)
If  then
then
By condition (A2′),  This is a contradiction since
This is a contradiction since 
If  by (A2′), there is a nonzero vector
by (A2′), there is a nonzero vector  such that
such that

This, together with (11), implies  This is a contradiction.
This is a contradiction.
Therefore, ![]() is a bounded curve.
is a bounded curve.
By an analogue argument as in Ref. [1], it is easy to show the following result.
Theorem 2.4 (Convergence of the method) Suppose that the conditions (A1), (A2′), and (A3) hold. Then for almost all  the zero-point set
the zero-point set  of the homotopy map (2) contains a smooth curve
of the homotopy map (2) contains a smooth curve
 which starts from
which starts from  As
As
 the limit set
the limit set  of
of 
is nonempty, and every point in ![]() is a solution of (1).
is a solution of (1).
Therefore, Theorem 2.4 shows that for almost all  the homotopy Equation (2)
the homotopy Equation (2)
generates a smooth curve  starts from
starts from 
which is called the homotopy path, the limit set
 of
of  is nonempty, and the x-component of every point in
is nonempty, and the x-component of every point in ![]() is a KKT point of (MOP), the
is a KKT point of (MOP), the  of the homotopy path is the solution of (1) as
of the homotopy path is the solution of (1) as  goes to 0.
goes to 0.
REFERENCES
- W. Song and G. M. Yao, “Homotopy Method for General Multiobjective Programming Problems,” Journal of Optimization Theory and Applications, Vol. 138, No. 1, 2008, pp. 139-153. doi:10.1007/s10957-008-9366-6
- H. W. Kuhn and A. W. Tucker, “Nonlinear Programming,” Proceedings of the Second Berkeley Symposium on Mathematical Statistics and Probability, University of California Press, Berkeley, 1951.
- T. Maeda, “Second-Order Conditions for Efficiency in Nonsmmoth Multiobjective Optimization Problems,” Journal of Optimization Theory and Applications, Vol. 122, No. 3, 2004, pp. 521-538. doi:10.1023/B:JOTA.0000042594.46637.b4
- C. Y. Lin and J. L. Dong, “Methods and Theories in Multiobjective Optimization,” Jinlin Education Press, Changchun, 1992.
- M. Abadie, “Generalized Kuhn-Tucker Conditions for Mathematical Programming,” SIAM Journal on Control, Vol. 7, No. 2, 1969, pp. 232-241. doi:10.1137/0307016
- R. B. Kellogg, T. Y. Li and J. A. Yorke, “A Constructive Proof of the Brouwer Fixed-Point Theorem and Computational Results,” SIAM Journal on Numerical Analysis, Vol. 13, No. 4, 1976, pp. 473-483. doi:10.1137/0713041
- S. N. Chow, J. Mallet-Paret and J. A. Yorke, “Finding Zeros of Maps: Homotopy Methods That are Constructive with Probability One,” Mathematical Computation, Vol. 32, 1978, pp. 887-899. doi:10.1090/S0025-5718-1978-0492046-9
- N. Megiddo, “Pathways to the Optimal Set in Linear Programming, in Progress in Mathematical Programming, Interior Point and Related Methods,” Springer, New York, 1988, pp. 131-158.
- M. Kojima, S. Mizuno and A. Yoshise, “A Primal-Dual Interior Point Algorithm for Linear Programming,” In: N. Megiddo, Ed., Progress in Mathematical Programming, Interior Point and Related Methods, Springer, New York, 1988, pp. 29-47.
- E. L. Allgower and K. Georg, “Numerical Continuation Methods: An Introduction,” Springer Verlag, Berlin, 1990. doi:10.1007/978-3-642-61257-2
- Z. H. Lin, B. Yu and G. C. Feng, “A Combined Homotopy Interior Method for Convex Nonlinear Programming,” Applied Mathematics and Computation, Vol. 84, No. 2-3, 1997, pp. 193-211. doi:10.1016/S0096-3003(96)00086-0
- Z. H. Lin, Y. Li and B. Yu, “A Combined Homotopy Interior Point Method for General Nonlinear Programming Problems,” Applied Mathematics and Computation, Vol. 80, No. 2-3, 1996, pp. 209-224. doi:10.1016/0096-3003(95)00295-2
- Z. H. Lin, D. L. Zhu and Z. P. Sheng, “Finding a Minimal Efficient Solution of a Convex Multiobjective Program,” Journal of Optimization Theory and Applications, Vol. 118, No. 1, 2003, pp. 587-600. doi:10.1023/A:1024739508603
- Y. F. Shang and B. Yu, “A Constraint Shifting Homotopy Method for Convex Multi-Objective Programming,” Journal of Computational and Applied Mathematics, Vol. 236, No. 5, 2011, pp. 640-646.
- X. Zhao, S. G. Zhang and Q. H. Liu, “Homotopy InteriorPoint Method for a General Multiobjective Programming Problem,” Journal of Applied Mathematics, Vol. 2012, 2012, Article ID: 497345.
- N. Kim and L. Thuy, “An Algorithm for Generating Efficient Outcome Points for Convex Multiobjective Programming Problem,” Intelligent Information and Database Systems Lecture Notes in Computer Science, Vol. 5991, No. 2010, 2010, pp. 390-399.
- Z. Chen, “Multiobjective Optimization Problems, Vector Variational Inequalities and Proximal-Type Methods,” Dissertations, Hong Kong Polytechnic University, Kowloon, 2010.