Applied Mathematics
Vol.05 No.17(2014), Article ID:50601,9 pages
10.4236/am.2014.517262
A Recursive Approach to the Kauffman Bracket
Abdul Rauf Nizami, Mobeen Munir, Umer Saleem, Ansa Ramzan
Division of Science and Technology, University of Education, Lahore, Pakistan
Email: arnizami@ue.edu.pk, mobeenmunir@gmail.com, umerlinks@hotmail.com, ansaramzan@yahoo.com
Copyright © 2014 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 26 July 2014; revised 28 August 2014; accepted 10 September 2014
ABSTRACT
We introduce a simple recursive relation and give an explicit formula of the Kauffman bracket of two-strand braid link . Then, we give general formulas of the bracket of the sequence of links of three-strand braids
. Then, we give general formulas of the bracket of the sequence of links of three-strand braids . Finally, we give an interesting result that the Kauffman bracket of the three-strand braid link
. Finally, we give an interesting result that the Kauffman bracket of the three-strand braid link
 is actually the product of the brackets of the two- strand braid links
is actually the product of the brackets of the two- strand braid links
 and
and . Moreover, a recursive relation for
. Moreover, a recursive relation for
 is also given.
is also given.
Keywords:
Recursive Relation, Kauffman Bracket, Braid Link

1. Introduction
The Kauffman bracket polynomial was introduced by L. H. Kauffman in 1987 [1] in concern with link invariants. The bracket polynomial soon became popular due to its connections with the Jones polynomial, dichromatic polynomial, and the Potts model. While the HOMPLY polynomial and the bracket polynomial are distinct with different topological properties, there is a very beautiful relationship between them due to F. Jaeger [2] , and it is also observed in a special case by Reshetikhin [3] .
The Kauffman bracket (polynomial) is actually not a link invariant because it is not invariant under the first Reidemeister move. However, it has many applications and it can be extended to a popular link invariant, the Jones polynomial. In the present work we shall confine ourselves to the Kauffman bracket to avoid this work from unnecessary length and to leave it for applications.
This paper is organized as follows: In Section 2 we shall give the basic ideas about knots, braids, and the Kauffman bracket. In Section 3 we shall present the main results.
2. Basic Notions
2.1. Links
A link is a disjoint union of circles embedded in . A one-component link is called a knot. Links are usually studied via projecting them on a plan; a projection with extra information of overcrossing and undercrossing is called the link diagram.
. A one-component link is called a knot. Links are usually studied via projecting them on a plan; a projection with extra information of overcrossing and undercrossing is called the link diagram.

Two links are isotopic if and only if one of them can be transformed to the other by a diffeomorphism of the ambient space onto itself. A fundamental result by Reidemeister [4] about the isotopic link diagrams is: Two unoriented links
 and
and
 are equivalent if and only if a diagram of
are equivalent if and only if a diagram of
 can be transformed into a diagram of
can be transformed into a diagram of
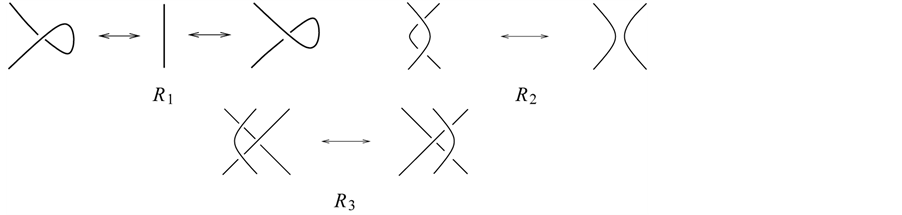
 by a finite sequence of ambient isotopies of the plane and the local (Reidemeister) moves of the following three types:
by a finite sequence of ambient isotopies of the plane and the local (Reidemeister) moves of the following three types:
The set of all links that are equivalent to a link
 is called a class of
is called a class of . By a link
. By a link
 we shall always mean the class of
we shall always mean the class of .
.
The main question of knot theory is Which two links are equivalent and which are not? To address this question one needs a knot invariant, a function that gives one value on all links that belong to a single class and gives different values (but not always) on knots that belong to different classes. The present work is basically concerned with this question.
2.2. Braids
Braids were first studied by Emil Artin in 1925 [5] [6] , which now play an important role in knot theory, see [7] -[9] for detail.
An n-strand
 is a set of
is a set of
 non intersecting smooth paths connecting
non intersecting smooth paths connecting
 points on a horizontal plane to
points on a horizontal plane to
 points exactly below them on another horizontal plane in an arbitrary order. The smooth paths are called strands of the braid.
points exactly below them on another horizontal plane in an arbitrary order. The smooth paths are called strands of the braid.

The product
 of two n-strand braids is defined by putting the braid
of two n-strand braids is defined by putting the braid
 above the braid
above the braid
 and then gluing their common end points.
and then gluing their common end points.
A braid with only one crossing is called elementary braid. The ith elementary braid
 on
on
 strands is:
strands is:
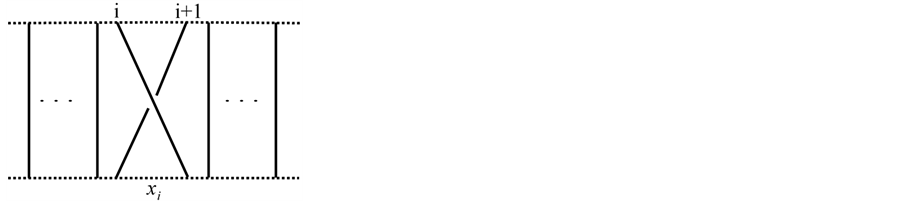
A useful property of elementary braids is that every braid can be written as a product of elementary braids. For instance, the above 2-strand braid is .
.
The closure of a braid
 is the link
is the link
 obtained by connecting the lower ends of
obtained by connecting the lower ends of
 with the corresponding upper ends.
with the corresponding upper ends.

An important result by Alexander [10] connecting knots and braids is: Each link can be represented as the closure of a braid. This result motivated knot theorists to study braids to solve problems of knot theory.
Remark 2.1 In the last section, all the concerned links will be closures of products of elementary braids.
2.3. The Kauffman Bracket
Before the definition it is better to understand the two types of splitting of a crossing, the A-type and the B-type splittings:

In the following, the symbols
 and
and
 represent respectively the unknot and the disconnected sum.
represent respectively the unknot and the disconnected sum.
Definition 2.2 The Kauffman bracket is the function
 defined by the axioms:
defined by the axioms:


Here ,
,
 , and
, and
 are three links which are isotopic everywhere except at one crossing where the look as in the figure:
are three links which are isotopic everywhere except at one crossing where the look as in the figure:

Proposition 2.3 The Kauffman polynomial is invariant under second and third Reidemeister moves but not under the first Reidemeister move [11] .
3. Main Results
In this section we shall introduce a recursive relation for the Kauffman bracket, shall give an explicit formula of
 , and shall express
, and shall express
 as the product of
as the product of
 and
and .
.
First of all we give the Kauffman bracket of the
 -twist unknot
-twist unknot :
:

Lemma 3.1 The Kauffman bracket of the
 -twist unknot is
-twist unknot is
Proof. We prove it by induction on :
:
The case
 holds by definition as
holds by definition as
 is the unknot without any crossings. Now, with the assumption that the result holds for an arbitrary
is the unknot without any crossings. Now, with the assumption that the result holds for an arbitrary , we have
, we have
Theorem 3.2 (A recursive relation) The following relation holds for any

 (3.1)
(3.1)
Proof. We prove it using directly the definition and Lemma 3.1:
From this recursive relation, we get the explicit formula for the 2-strand braid link :
:
Proposition 3.3 The Kauffman bracket of the link
 is
is

Proof. We prove it by induction on .
.
For , we have
, we have
which satisfies the recursive relation.
With the assumption that the relation holds for an arbitrary n, we, using Theorem 3.2, get
This completes the proof. ,
In the following we give the Kauffman bracket polynomial of the closure of the braid
 (n factors); this sequence contains the powers of the Garside element
(n factors); this sequence contains the powers of the Garside element :
: .
.
Proposition 3.4 The Kauffman bracket of
 satisfy the recurrence relations:
satisfy the recurrence relations:






Proof. Simply, apply the definition for different values of , and write recursively each next bracket in terms of the previous one. ,
, and write recursively each next bracket in terms of the previous one. ,
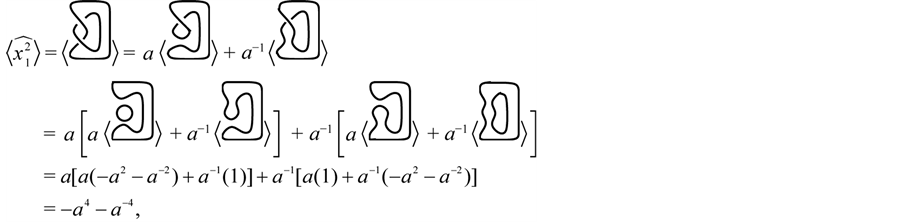
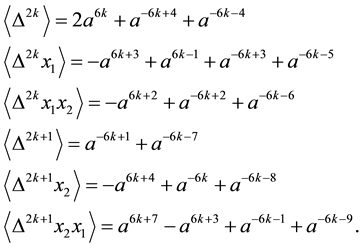
Lemma 3.5 The Kauffman brackets for
 are:
are:

Proof. The proofs of first three cases are given (proofs of remaining cases are similar):

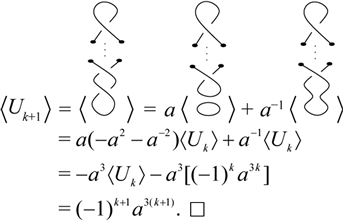
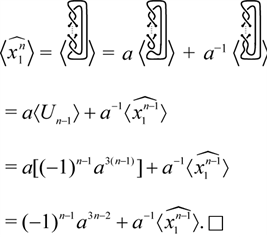
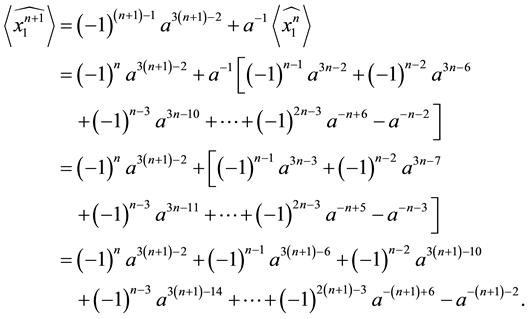
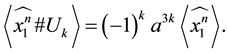
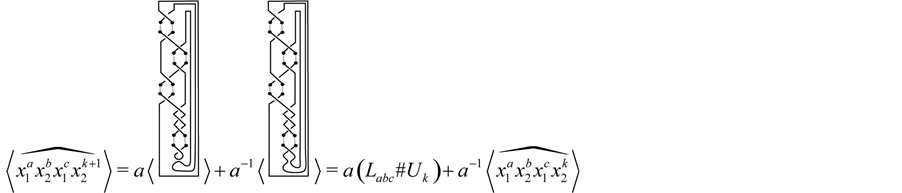
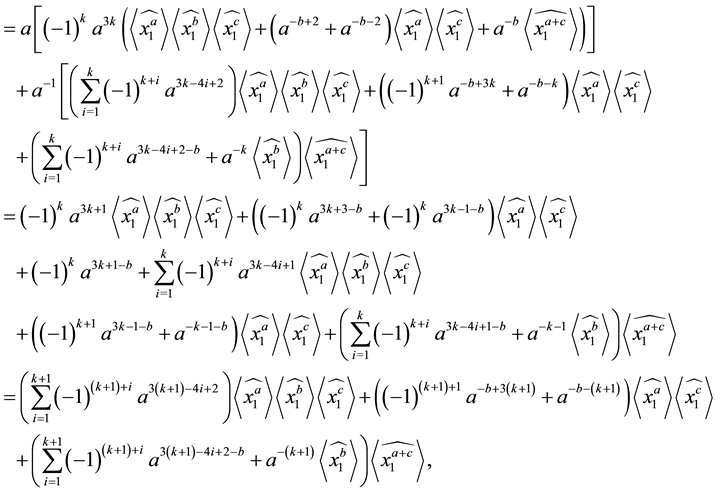
Theorem 3.6 For any
 the Kauffman bracket of
the Kauffman bracket of
 is given by:
is given by:
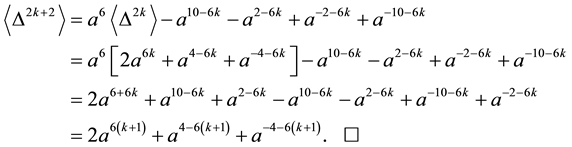
Proof. We prove it by induction on . The case
. The case
 is covered by Lemma 3.5, and the inductive step can be checked with Proposition 3.4.
is covered by Lemma 3.5, and the inductive step can be checked with Proposition 3.4.
For instance,
In connected sum
 of the braid link
of the braid link
 with the trivial knot
with the trivial knot
 has the diagram:
has the diagram:

Lemma 3.7
Proof. We prove it by induction on :
:
For , we have
, we have

Now, with the assumption that the result holds for an arbitrary , we have
, we have
as required. ,
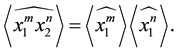
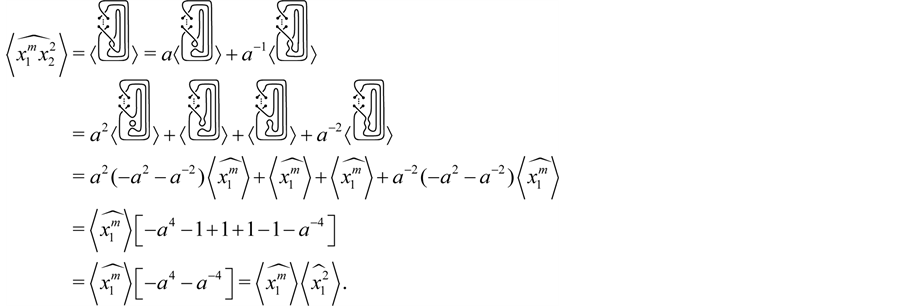
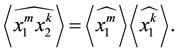
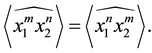
The following result confirms that the Kauffman bracket of
 is actually the product
is actually the product

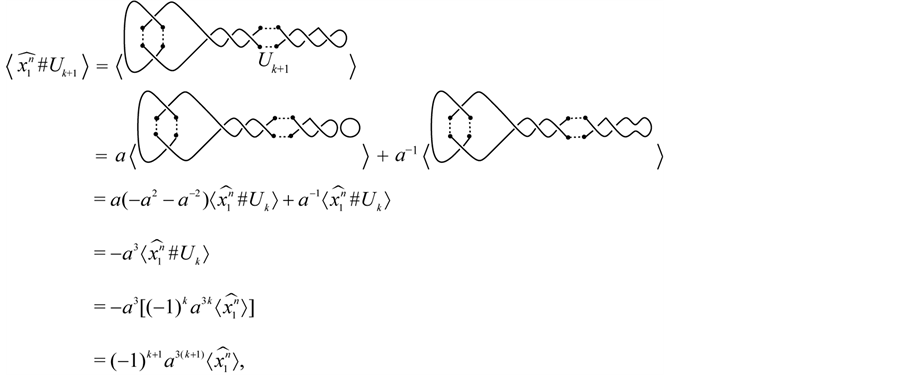
Theorem 3.8 For any ,
,
Proof. We prove it by induction on :
:
When ,
,
 (3.2)
(3.2)
Suppose the result holds for , that is
, that is
Now, using Lemma 3.7, we have
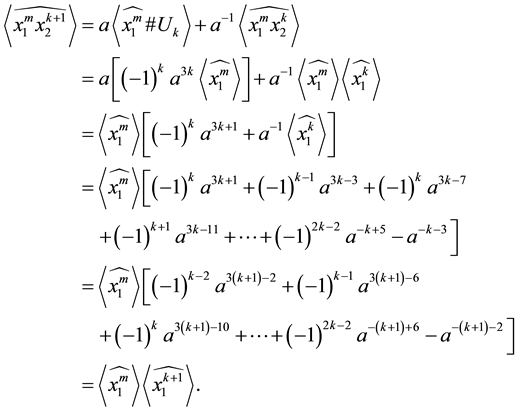
This completes the proof. ,
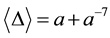
Corollary 3.9
Proof. It is obvious:

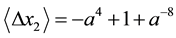
Corollary 3.10
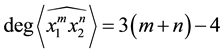
and
Proof. The result follows immediately from Theorem 3.8 as
 and span
and span
 ,
,
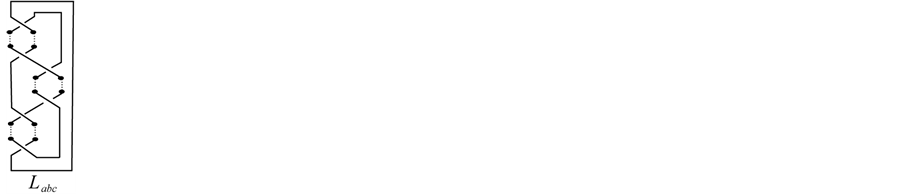
For the following, let us fix the notation
 for the link with the understanding that the link contains a, b,
for the link with the understanding that the link contains a, b,
and
 crossings of type
crossings of type , and
, and , respectively, and that
, respectively, and that .
.
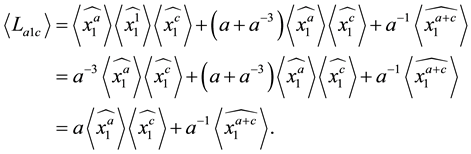
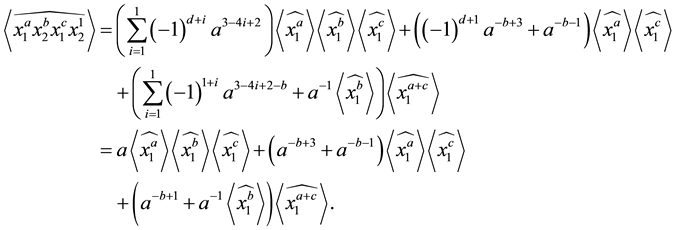
Proposition 3.11 The Kauffman bracket of the link
 is
is

Proof. We prove it by induction on :
:
For , we have
, we have
Now, with the assumption that the result holds for an arbitrary , we have
, we have


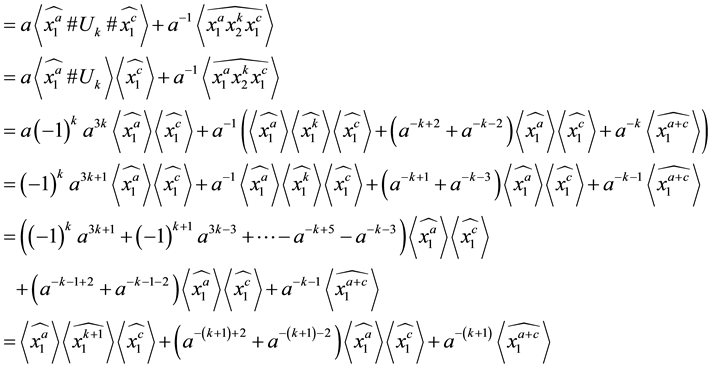
as required. ,
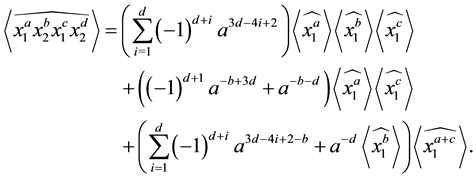
Proposition 3.12 The Kauffman bracket of the link
 is
is
Proof. We prove it by induction on :
:
For , we have
, we have
Now, with the assumption that the result holds for , we have
, we have
as was required. ,
References
- Kauffman, L.H. (1987) State Models and the Jones Polynomial. Topology, 26, 395-407. http://dx.doi.org/10.1016/0040-9383(87)90009-7
- Jaeger, F. (1990) A Combinatorial Model for the Homy Polynomial. European Journal of Combinatorics, 11, 549-555.
- Reshetikhin, N.Y. (1988) Quantized Universal Enveloping Algebras, the Yang-Baxter Equation and Invariants of Links, I and II. LOMI Reprints E-4-87 and E-17-87, Steklov Institute, Leningrad, USSR.
- Reidemeister, K. (1948) Knot Theory. Chelsea Publ and Co., New York.
- Artin, E. (1925) Theorie der Z
![]() pfe. Abhandlungen aus dem Mathematischen Seminar der Universität Hamburg, 4, 27-72. http://dx.doi.org/10.1007/BF02950718
pfe. Abhandlungen aus dem Mathematischen Seminar der Universität Hamburg, 4, 27-72. http://dx.doi.org/10.1007/BF02950718 - Artin, E. (1947) Theory of Braids. Annals of Mathematics, 48, 101-126. http://dx.doi.org/10.2307/1969218
- Birman, J.S. (1974) Braids, Links, and Mapping Class Groups. Princeton University Press, Princeton.
- Manturov, V.O. (2004) Knot Theory. Chapman and Hall/CRC, Boca Raton. http://dx.doi.org/10.1201/9780203402849
- Murasugi, K. (1996) Knot Theory and Its Applications. Birkh
![]() User, Boston.
User, Boston. - Alexander, J. (1923) Topological Invariants of Knots and Links. Transactions of the American Mathematical Society, 20, 275-306.
- Adams, C.C. (1994) The Knot Book. W H Freeman and Company, New York.
 pfe. Abhandlungen aus dem Mathematischen Seminar der Universität Hamburg, 4, 27-72.
pfe. Abhandlungen aus dem Mathematischen Seminar der Universität Hamburg, 4, 27-72.  User, Boston.
User, Boston.