Paper Menu >>
Journal Menu >>
 Intelligent Information Management, 2009, 1, 145-149 doi:10.4236/iim.2009.13021 Published Online December 2009 (http://www.scirp.org/journal/iim) Copyright © 2009 SciRes IIM 145 Reliability Optimization of Entropy Based Series-Parallel System Using Global Criterion Method G. S. MAHAPATRA Department of Engineering Sciences and Humanities, Siliguri Institute of Technology, Siliguri, India Email: g_s_mahapatra@yahoo.com Abstract: In this paper, we have considered a series-parallel system to find out optimum system reliability with an additional entropy objective function. Maximum system reliability of series-parallel system is de- pending on proper allocation of redundancy component in different stage. The goal of entropy based reliabil- ity redundancy allocation problem is to find optimal number of redundancy component in each stage such a manner that maximize the system reliability subject to available total system cost. Global criterion method is used to analyze entropy based reliability optimization problem with different weight function of objective functions. Numerical examples have been provided to illustrate the model. Keywords: reliability, series-parallel system, redundancy, entropy, global criterion method 1. Introduction The problem of reliability redundancy allocation is to find out optimal system reliability by optimal allocation of redundancy components in series-parallel system. Re- liability of a multi-stage system can be improved by add- ing similar or some different components redundancy to each sub-system as design alternatives. The design of a reliable system was improved by Hikita et al. [3] by the addition of redundant components. Several researcher [1, 2,4,5,12,13,17,20–22] presented redundancy optimization with multiple objective functions of system reliability, system cost and system weight etc. and solve that objec- tive redundancy allocation problem by different algori- thm and nonlinear optimization techniques for multi- objective system reliability design optimization in fuzzy and crisp environments. Tillman et al. [19] presented a comprehensive survey of previous works for system re- liability with redundancy. Singh and Misra [18], Kuo and Prasad [7], Kuo et al. [8], and Misra [10] presented reliabil- ity redundant allocation problem to increase the system reliability, which is important in reliability engineering. For series-parallel reliability redundancy allocation problem, entropy represents the lack of the information about the state of the each sub-system. Very few authors discussed reliability analysis with entropy consideration. Musto and Saridis [11] presented entropy-based reliabil- ity assessment technique. The technique was demon- strated in a case study of a robotic system. Rocchi [15] introduced the entropy function in order to study the re- liability and repairability of systems. Ridder [14] inves- tigated the application and usability of the cross-entropy method for rare event simulation in Markovian reliability models. Rocchi [16] discussed and calculated the reli- ability function during system again through the stochas- tic entropy. Kroese et al. [6] introduced a new approach based on cross-entropy method for optimization of net- work reliability. Here, we have considered a multi-objective entropy based reliability redundancy problem to finding the op- timum number of redundant components, which maxi- mize the system reliability with entropy as an additional objective function subject to available system cost. The redundancy reliability optimization problem is consid- ered with two objective functions such as maximum sys- tem reliability and maximum entropy amount simulta- neously with restriction on system cost. Numerical ex- ample is presented using global criterion method. 2. Reliability Redundancy Allocation Model 2.1. Notations Series Parallel system, reliability redundancy allocation model is developed under the following notations. Ri reliability of each component of reliability model in the ith stage, Ci cost of each component of reliability model in the ith stage, C available system cost of the reliability model, xi number of redundancy components in the ith stage (decision variables),  G. S. MAHAPATRA 146 12 , ,..., s n Rxxx system reliability function of the reliability model, 12 , ,..., s n Cxxx system cost function of the re- liability model, 12 ,,..., n En xxx i entropy function of the reli- ability model. 2.2. Reliability Redundancy Allocation Problem It is to be considered that an n stage series system and at each stage added (xi-1) redundant components in parallel, the objectives are to determine the number of redundant components at each stage such that the system reliability will be maximize subject to related cost constraints. Therefore the maximization of Rs subject to the limited available cost C has to be found. Therefore the problem becomes 12 , ,...,11i nx sn i Max RxxxR (1) subject to 12 1 , ,...,exp4 n i snii i x CxxxCxC xi >1 for i=1,2,...,n. 2.3. Entropy in Series Parallel System Entropy has important physical implications as the amount of “disorder” of a system. A more abstract defi- nition is used in mathematics. The Shannon entropy of a variable X is defined as ln x En Xp xp x (2) where p(x) is the probability that X is the state x, and p(x) log p(x) is defined as 0 if p(x) = 0. Reliability redundancy allocation problem is the re- dundancy distribution of each stage of a series-parallel system. To determine a suitable measure of allocation, let us consider a n-stage series-parallel system with xi (i=1,2,…,n) number of redundant component of each ith stage of the system. It is known that xi are positive inte- ger and total number of components is i i x . Redun- dancy allocation of components share of ith stage is the share of the total number of redundant component is i i i x i x p. Normalizes the redundancy numbers xi by dividing them by the total number of redundant compo- nents i i x then the probability distribution i i i x i x p is found. The measure of allocation shall be defined as the ex- pected information of the message which transforms the system shares into the share of each stage. Figure 1. A schematic diagram of the n-stage system So (3) 12 1 , ,...,ln n ni i En xxxpp i where i i i i x p x The each stage share i i i i x p x satisfying the con- dition and defines a probability distribution and the Shannon-entropy meas- ure the diversity of the probability distribu- tion 0 (i=1,2,...,n) i p 1 i i p 12 , ,...,. n pp p 12 ... 1/ n p n Maximum is reached when pp i.e. when allocation of all stage have the same no of redundant components. Since increasing of xi, maximizing Inpi is equivalent to maximizing entropy as defined above. This is one of the reasons why the entropy optimization model is particu- larly suitable for the redundancy allocation problem. In redundancy allocation problem, entropy acts as a meas- ure of dispersal of allocation between stages. So it will be more potential if we would like to have maximum system reliability as well as maximize entropy measure. 2.4. Multi-Objective Entropy Redundancy Allocation Problem Taking entropy function as additional objective func- tion the problem (1) becomes 12 , ,...,11i nx sn i Maximize RxxxR i (4) 12 1 , ,...,log ii ii n xx n x x i Maximize Enxxx Subject to same constraint and restriction as in (1) 3. Method of Global Criterion A multi-objective non-linear problem may be taken in the following form Maximize/Minimize f(x) = [f1(x), f2(x),…, fk(x) ]T (5) subject to x X={x Rn : gj(x) b j for j=1,…,m; lixiui for i=1,2,...,n}. Solve the multi-objective non-linear problem (5) as a Copyright © 2009 SciRes IIM  G. S. MAHAPATRA 147 single objective non-linear problem k times for each problem by taking one of the objective at a time and ig- noring the others. From the result, determine the corre- sponding values for every objective for each derived solution. For each objective r f x, find lower bound (minimum) l r f and the upper bound (maximum)u r f . In the global criterion method [9], the distance be- tween some reference point and the feasible objective region is minimized. The analyst has to select the refer- ence point and the metric for measuring the distances. Suppose that the weighting coefficients wr are real num- bers such that and 0,1, 2,..., r wr k 1 1 k r r w . Here we examine the method where the ideal objective vector is used as a reference point and Lp-metrics are used for measuring. In this case, the weighted Lp -problem for minimizing distances is stated as Minimize 1 1 p p l m rr pr ul rir fx f Lfxwff (6) Subject to x X for 1 p The exponent 1/p may be dropped. Problems with or without the exponent 1/p are equivalent for 1p . The solution obtained depends greatly on the value cho- sen for p, commonly used choices are p=1,2 or . For p=1, 1 1 l m r rul rrr r f xf Lfxw f f (7) The objective function 1 L fx is the sum of the normalized weighted deviations, which is to be mini- mized. For p=2, 1 22 2 1 l m rr rul rrr fx f Lfxw ff (8) When p becomes larger, the minimization of the de- viation becomes more and more important. If p= , GCM (6) is of the form Minimize 1,2,..., max l r rul rk rr r f xf w f f (9) Subject to x X. The problem (9) can be transformed into the following form Minimize (10) Subject to l rr rul rr fx f wff for all r=1,2,…,k. x X where both n x and are variables. 4. Global Criterion Method on Entropy Based Reliability Redundancy Problem In entropy based reliability optimization of series-parall- el system, maximum system reliability s Rx and maximum entropy En x has to be found, having sub- ject to the system cost constraint with goal of system cost is C. So the problem is a multi-objective entropy reliability redundancy allocation problem as fol- lows s Cx s M aximize Rx (11) M aximize En x Subject to s CxC Where 12 ,,..., n x xx xand xi >1 for i=1,2,...,n. To solve the above multi-objective reliability optimi- zation problem (11), according to section 3 pay-off ma- trix is formulated as follows: 1 2 x x ** ** () () () s s s Rx Enx Rx Enx RxEn x Now lower and upper bounds of s RxandEnx ,, are identified and denoted as L ULU and EnEn ss R R re- spectively. Using Global criterion method for the problem (11), the weighted Lp-problem for minimizing distances is stated as Minimize 1 12 , ps pp p LL ss ULU L ss LRxEnx Rx REnxEn ww RR EnEn (12) Subject to s CxC , for 1p Putting different value of p (1,2 or ) in (12), we get as follows For p=1, 1 12 , s L L ss ULU L ss LRxEnx R xR EnxEn ww R REnE n (13) For p=2, 2 1 22 2 12 , s LL ss ULU L ss LRxEnx Rx REnxEn ww RR EnEn (14) Copyright © 2009 SciRes IIM  G. S. MAHAPATRA Copyright © 2009 SciRes IIM 148 For p= , (12) is of the form Minimize (15) Subject to 1 L ss UL ss Rx R wRR 2 L UL En xEn wEn En . To solve the entropy based reliability redundancy al- location problem (11) using GCM, we have to solve (13), (14), (15) with same constraints as in Equation (10) for different weight. 5. Numerical Example A four stage reliability redundancy allocation problem with entropy objective function with cost constraints is considered for numerical exposure. The problem be- comes as follows: Maximize 4 1234 ,,,11 i x s i Rxxxx R i Maximize 4 1234 1 ,,, log ii ii xx x x i En xxxx subject to (16) 12 1 , ,...,exp4 n i snii i x Cxx xCxC , x >1 for i=1,2,3,4. of the problem (5.1) are given in ta- bl : T 1. Input d food4) 1 2341 2 3 4 ableatar mel ( RR R R C CC C C 0.85 0.9 0.8 0.95 8 9 7 10 200 The pay-off matrix is formulated as follows: () () 0.9976021 1.366073 0.8627854 1.386294 s Rx Enx 1 x i Input parameters e 1. Solution 2 x Here 0.9976021, 0.8627854, ss RR 1.386294, 1.366073 UL En En are identified and us- ing these bounds construct the objective functions. The optimal solutions of the multi-objective reliability opti- mization model (16) using global criterion method UL (fol- lo when thrence to entropy function tHere wing (13), (14) and (15)) are given in Table 2 for dif- ferent preference values of the objective functions. In case-I, Table 2 shows different optimal solutions e decision maker supplies more prefe the han the reliability function. ** R sx is maximum when p= 2, whereas En x is maximum when p =2 or ∞. In Table 2, case-II gives different optimal solutions e decision maker supplies equal pre to entropy function. Here ** when thferences the reliability function and ** R sx is maximum when p=1, whereas En x is remains unaltered for p. In case-III, Table 2 shows different optimal solutions e deciser supplies more preferenc he entropy function. Here ** when thion make to the reliability function than t ** s Rx and ** En x remains unaltered for p. Table igtages of system reliability (w1) and entropy functions (w2) by GCM 2. Optimal solution for different we Case w1 w 2 p * 1 x * 2 x * 3 x * 4 x ** s R x ** En x 1 2 3 2 3 0.9373444 1.366159 2 2 2 3 2 0.9575832 1.368922 I 0.2 0.8 ∞ 2 3 2 2 0.9351179 1.368922 1 2 2 3 2 0.9575832 1.368922 2 2 2 2 3 0.9288999 1.368922 II 0.5 0.5 ∞ 2 2 2 3 0.9288999 1.368922 1 2 2 2 2 0.9266935 1.386294 2 2 2 2 2 0.9266935 1.386294 III 0.8 0.2 ∞ 2 2 2 2 0.9266935 1.386294 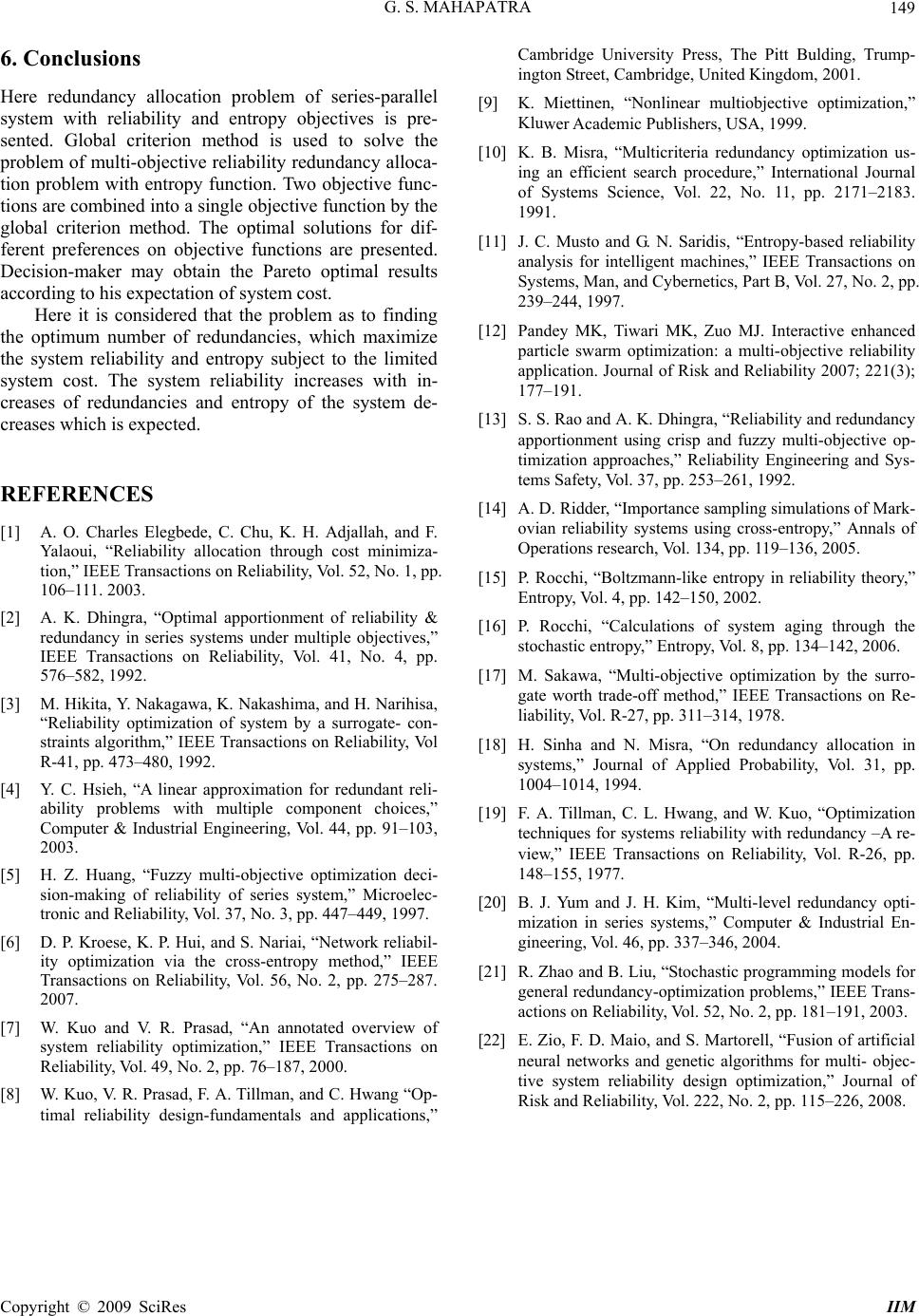 G. S. MAHAPATRA 149 6. Consion Here redundancy allocation probleseries-parallel ility and entropy objectives is pre- erion method is used to solve the [1] A. O. Charles Elegbede, C. Chu, K. H. Adjallah, and F. y allocation through cost minimiza- actions on Reliability, Vol. 52, No. 1, pp. . Camge Univs, The Pit Trump- ington Street, CambridgeKingdom, 2001. [9] K. Miettinen, “Nonlinear multiobjective optimization,” 4, 1997. y, Vol. 37, pp. 253–261, 1992. h the ization by the surro- clus m of system with reliab sented. Global crit Klu problem of multi-objective reliability redundancy alloca- tion problem with entropy function. Two objective func- tions are combined into a single objective function by the global criterion method. The optimal solutions for dif- ferent preferences on objective functions are presented. Decision-maker may obtain the Pareto optimal results according to his expectation of system cost. Here it is considered that the problem as to finding the optimum number of redundancies, which maximize the system reliability and entropy subject to the limited system cost. The system reliability increases with in- creases of redundancies and entropy of the system de- creases which is expected. REFERENCES [14] Yalaoui, “Reliabilit tion,” IEEE Trans 106–111. 2003. [15] [2] A. K. Dhingra, “Optimal apportionment of reliability & redundancy in series systems under multiple objectives,” IEEE Transactions on Reliability, Vol. 41, No. 4, pp. 576–582, 1992. [3] M. Hikita, Y. Nakagawa, K. Nakashima, and H. Narihisa, “Reliability optimization of system by a surrogate- con- straints algorithm,” IEEE Transactions on Reliability, Vol R-41, pp. 473–480, 1992 [4] Y. C. Hsieh, “A linear approximation for redundant reli- ability problems with multiple component choices,” Computer & Industrial Engineering, Vol. 44, pp. 91–103, 2003. [5] H. Z. Huang, “Fuzzy multi-objective optimization deci- sion-making of reliability of series system,” Microelec- tronic and Reliability, Vol. 37, No. 3, pp. 447–449, 1997. [6] D. P. Kroese, K. P. Hui, and S. Nariai, “Network reliabil- ity optimization via the cross-entropy method,” IEEE Transactions on Reliability, Vol. 56, No. 2, pp. 275–287. 2007. [7] W. Kuo and V. R. Prasad, “An annotated overview of system reliability optimization,” IEEE Transactions on Reliability, Vol. 49, No. 2, pp. 76–187, 2000. [8] W. Kuo, V. R. Prasad, F. A. Tillman, and C. Hwang “Op- timal reliability design-fundamentals and applications,” bridersity Prest Bulding, , United wer Academic Publishers, USA, 1999. [10] K. B. Misra, “Multicriteria redundancy optimization us- ing an efficient search procedure,” International Journal of Systems Science, Vol. 22, No. 11, pp. 2171–2183. 1991. [11] J. C. Musto and G. N. Saridis, “Entropy-based reliability analysis for intelligent machines,” IEEE Transactions on Systems, Man, and Cybernetics, Part B, Vol. 27, No. 2, pp. 239–24 [12] Pandey MK, Tiwari MK, Zuo MJ. Interactive enhanced particle swarm optimization: a multi-objective reliability application. Journal of Risk and Reliability 2007; 221(3); 177–191. [13] S. S. Rao and A. K. Dhingra, “Reliability and redundancy apportionment using crisp and fuzzy multi-objective op- timization approaches,” Reliability Engineering and Sys- tems Safet A. D. Ridder, “Importance sampling simulations of Mark- ovian reliability systems using cross-entropy,” Annals of Operations research, Vol. 134, pp. 119–136, 2005. P. Rocchi, “Boltzmann-like entropy in reliability theory,” Entropy, Vol. 4, pp. 142–150, 2002. [16] P. Rocchi, “Calculations of system aging throug stochastic entropy,” Entropy, Vol. 8, pp. 134–142, 2006. [17] M. Sakawa, “Multi-objective optim gate worth trade-off method,” IEEE Transactions on Re- liability, Vol. R-27, pp. 311–314, 1978. [18] H. Sinha and N. Misra, “On redundancy allocation in systems,” Journal of Applied Probability, Vol. 31, pp. 1004–1014, 1994. [19] F. A. Tillman, C. L. Hwang, and W. Kuo, “Optimization techniques for systems reliability with redundancy –A re- view,” IEEE Transactions on Reliability, Vol. R-26, pp. 148–155, 1977. [20] B. J. Yum and J. H. Kim, “Multi-level redundancy opti- mization in series systems,” Computer & Industrial En- gineering, Vol. 46, pp. 337–346, 2004. [21] R. Zhao and B. Liu, “Stochastic programming models for general redundancy-optimization problems,” IEEE Trans- actions on Reliability, Vol. 52, No. 2, pp. 181–191, 2003. [22] E. Zio, F. D. Maio, and S. Martorell, “Fusion of artificial neural networks and genetic algorithms for multi- objec- tive system reliability design optimization,” Journal of Risk and Reliability, Vol. 222, No. 2, pp. 115–226, 2008. Copyright © 2009 SciRes IIM |