Paper Menu >>
Journal Menu >>
 Wireless Sensor Network, 2009, 1, 458-466 doi:10.4236/wsn.2009.15055 Published Online December 2009 (http://www.scirp.org/journal/wsn). Copyright © 2009 SciRes. WSN A Mobile-Agent-Based Adaptive Data Fusion Algorithm for Multiple Signal Ensembles in Wireless Sensor Networks Tianjing WANG1, Zhen YANG2, Guoqing LIU1 1 College of Science, Nanjing University of Technology, Nanjing, China 2Institute of Signal and Information Processing, Nanjing University of Posts&Telecommunications, Nanjing, China Email: tjingwang@126.com Received June 8, 2009; revised August 17, 2009; accepted August 18, 2009 Abstract Distributed Compressed Sensing (DCS) is an emerging field that exploits both intra- and inter-signal correla- tion structures and enables new distributed coding algorithms for multiple signal ensembles in wireless sen- sor networks. The DCS theory rests on the joint sparsity of a multi-signal ensemble. In this paper we propose a new mobile-agent-based Adaptive Data Fusion (ADF) algorithm to determine the minimum number of measurements each node required for perfectly joint reconstruction of multiple signal ensembles. We theo- retically show that ADF provides the optimal strategy with as minimum total number of measurements as possible and hence reduces communication cost and network load. Simulation results indicate that ADF en- joys better performance than DCS and mobile-agent-based full data fusion algorithm including reconstruc- tion performance and network energy efficiency. Keywords: Wireless Sensor Networks, Mobile Agent, Compressed Sensing, Distributed Compressed Sensing, Joint Sparsity, Joint Reconstruction 1. Introduction Wireless Sensor Networks (WSN) are an emerging technology that promises an ability to monitor the physical world via spatially distributed networks of small and inexpensive wireless sensor nodes that have the abil- ity to self-organize into a well-connected network. The communication tasks consume the limited power avail- able at such sensor nodes and, therefore, in order to en- sure their sustained operations, the power consumption must be kept to minimum. Different from transmission cost, the computational cost may be negligible for some applications. For example, WSN monitoring field tem- perature may use simple functions which essentially are of insignificant cost. Consequently, a major challenge in the design of WSN is developing schemes that extract relevant information about the sensor data with the minimum energy consumption, especially with transmis- sion cost. In order to reduce transmission of sensor data, a new framework for single signal sensing and compres- sion has developed recently under the rubric of Com- pressed Sensing (CS) [1–3]. The implications of CS are promising for many applications, especially sensing sig- nals that have a sparse representation in some basis [4–6]. Based on the intra-signal correlations (between samples in each signal), CS can perfectly reconstruct a com- pressible signal from remarkably few linear measure- ments. In WSN, however, a large number of sensor nodes presumably observe related phenomena and are programmed to perform a variety of signals acquisition tasks. These signals have high correlations and need to be jointly processed, so the independently encoding and decoding theory and practice of single signal in a CS framework can not satisfy such applications. Fortunately, the ensemble of signals that sensor nodes acquired can be expected to possess some joint structure, or inter-signal correlations (between samples across signals), in addition to the intra-signal correlation of single signal. Most ex- isting coding algorithms [7,8], however, exploit only inter-signal correlations and not intra-signal correlations. A new Distributed Compressed Sensing (DCS) theory exploits both intra-signal and inter-signal correlation structures of multiple signal ensembles [9–11]. In a typi- cal DCS scenario, each individual node independently encodes its signal by CS framework and then transmits *Supported by the Young Teacher Academic Fund of Nanjing Univer- sity of Technology  T. J. WANG ET AL. Copyright © 2009 SciRes. WSN 459 the measurements to a distant Sink node (Sink) by multi- ple skips. Under the right conditions, Sink can jointly reconstruct multiple signal ensembles precisely. How- ever, we note that the network traffic may be extremely heavy in DCS, resulting in poor performance of the sys- tem, when the number of sensor nodes is big and the amount of sensing signals is large. Furthermore, nodes can not know the suited minimum number of measure- ments that they need to transmit to Sink under DCS framework. In order to guarantee perfect reconstruction, each node has to transmit enough measurements. This means that DCS only utilizes the inter-signal correlations in jointly decoding processes, but not in jointly encoding processes. In this paper, we design a mobile-agent-based Adap- tive Data Fusion (ADF) algorithm for multiple signal ensembles which is inspired by DCS. Instead of passing large amounts of independently encoding measurements by DCS in each individual node over the network, Mo- bile Agent (MA) can fuse multiple signals from node to node along a shortest path, based on Global Closest First (GCF) heuristics algorithm [12]. According to the sparse property of single signal and the joint sparsity of multiple signal ensembles under the results of data fusion, each node can determine the minimum number of measure- ments needed to transmit to Sink and effectively reduces the transmission cost. Extensive experiments in session 4 demonstrate that the energy efficiency and the recon- struction performance of ADF are more excellent than DSC and mobile-agent-based Full Data Fusion (FDF) algorithm. The organization of this paper is as follows. Section 2 overviews a joint sparsity model in DCS. Single signal and multiple signals reconstruction methods are dis- cussed respectively. Section 3 introduces our two mo- bile-agent-based data fusion algorithms: Full Data Fu- sion (FDF) and Adaptive Data Fusion (ADF). Detailed theoretical analyses indicate that FDF and ADF are more energy efficient than DCS, sufficiently utilizing intra- signal and inter-signal correlation of multiple signal en- sembles. Experiments in Section 4 confirm that ADF indeed reduces large amounts of total transmission cost and the number of total measurements compared to DCS and FDF. Section 5 describes conclusions. 2. Distributed Compressed Sensing 2.1. Joint Sparsity Model The recently introduced theory of DCS enables a new distributed coding algorithm that exploits both intra- and inter-signal correlation structures of multiple signals [9]. In this paper, we focus on a Joint Sparsity Models (JSM, sparse common component +innovations), which can be improved by mobile-agent-based data fusion. For exam- ple, a practical situation well-modeled by the JSM is a group of sensors {Sl ,…SJ } measuring temperatures at a number of outdoor locations throughout the day. The temperature readings xl(l∈{1,2,…J}) have both tempo- ral (intra-signal) and spatial (inter-signal) correlations. Global factors, such as the sun and prevailing winds, could have an effect that is both common to all sensors and structured enough to permit sparse representation in some basis. More local factors, such as shade, water, or animals, could contribute localized innovations that are also structured (and hence sparse in some basis). A simi- lar scenario could be imagined for a network of sensors recording light intensities, air pressure, or other phe- nomena. All of these scenarios correspond to measuring properties of physical processes that change smoothly in time and in space and thus are highly correlated. We adopt language and notation from [9]. Assume that there exists a known basis {|,1,,} m ii Rim ψψΨ=∈= L in which a signal {(1),,()}({1,2,,}) Tm lll xxxmRlJ =∈∈ LL can be sparsely represented as ll x θ =Ψ , where ((1),,()) T lll mθθθ= L is a sparse coefficient vector and 0 |||| l k θ = . Thus, a compressible multiple signal ensem- ble 1 ,, J xx L shares a common sparse component while each single signal contains an innovation sparse compo- nent. That is ˆ lCl θθθ =+ , {1,2,,} lJ ∈ L (1) with 0 ,|||| CCCC xk θθ =Ψ= and 0 ˆ ˆ ˆ,|||| llll xk θθ =Ψ= () lC kk < (2) where kc is a common sparse parameter of θc and kl is an innovation sparse parameter of θl. Thus, the signal xc is common to all of ({1,2,,}) l xlJ ∈ L and has sparse coefficient vector θc in basis ψ, and the signal ˆ ({1,2,,}) l xlJ ∈ L is the unique portions of xl and has sparse coefficient vector ˆ l θ in the same basis. Denote that Ωc is a tight support set of the nonzero values in θc and Ωl is a tight support set of the nonzero values in ˆ l θ . To make linear measurements, denote the measure- ment matrix () l lijnm ϕ × Φ= ({1,2,,}) lJ ∈ L for the mul- tisignal ensembles, where a second basis matrix Φl is inco- herent with Ψ. Thus, a small number of noiseless measure- ments ((1), llll yxy=Φ= ,())({1,2,,}) T ll ynlJ ∈ LL contain sufficient information for approximate reconstru- ction [1,2]. Mathematically, this can be reduced to a standard linear algebra problem: we wish to find  T. J. WANG ET AL. Copyright © 2009 SciRes. WSN 460 ({1,2,,}) l xlJ ∈ L which explains the measurements lllll yx θ =Φ=ΦΨ ({1,2,,}) lJ ∈ L . 2.2. Joint Reconstruction of Multiple Signal Ensembles via 1 l Optimization To give ourselves a firm footing for analyses, we firstly consider single signal reconstruction based on the CS theory, mainly to exploit intra-signal structure at a single node. CS encodes a workable approximation of the sin- gle compressible signal ({1,2,,}) l xlJ ∈ L with l nm = sampling resources and signal reconstruction can be achieved by Basis Pursuit (BP) [1,2] or Orthogonal Matching Pursuit (OMP) [3]. OMP allows faster recon- struction at the expense of more measurements. Formally, BP needs to solve the following 1 l optimi- zation problem (P1) 1 min|||| l θ subject to lllll yx θ =Φ=ΦΨ ({1,2,,}) lJ ∈ L (3) The simulation results in [2] state that there exists meas- urements n ≥ck (oversampling factor c ≥ 4) are required to reconstruct l x with high probability, using linear programming methods e.g. interior point method and simplex method. That is, an optimal reconstructed signal ** ll x θ =Ψ can be achieved by an optimal sparse solution * l θ of the problem (P1). In addition to single signal encoding and decoding methods, the jointly encoding and decoding methods of multiple signal ensembles are considered in DCS. DCS expects that 1) () Cl ckk + ({1,2,,}) lJ ∈ L measurements suffice to reconstruct x1, 2) 1 () J Cl l ckk = + ∑ measurements suffice to reconstruct multiple signal ensembles x1,..., xJ, for there exists 1 J Cl l kk = + ∑ nonzero elements in x1,..., xJ . Furthermore, the recovery problem can be formulated using matrices and vectors as 1 C J θ θ θ θ = M , 1 J x x x = M , 1 J y y y = M , 1 0 0 J Φ Φ= Φ L %O L , 0 0 ΨΨ Ψ= ΨΨ L %MO(4) In order to sufficiently utilize inter-signal correlation of multiple signal ensembles, we assume that 1J Φ==Φ=Φ L and then Φ % can be rewritten as (,,) diag Φ=ΦΦ % L . It is possible to let Sink previously send the same random seed to all sensor nodes in the interesting field and then the same pseudorandom matrix Φ can be generated using simple algorithm with seed at each node. With sufficient sampling, DCS can reconstruct multi- ple signal ensembles by solving the following 1 l opti- mization problem (P2) 1 min|||| θ subject to y θ =ΦΨ % % (5) Due to the optimal spare solution * θ of the problem (P2), we can get the corresponding reconstructed multi- signal ensembles ** x θ =Ψ % . 3. Mobile-Agent-Based Adaptive Data Fusion Algorithm The DCS theory proposes a framework for joint recon- struction of compressible multi-signal ensembles. How- ever, each single node independently encodes in DCS, which does not sufficiently utilize the joint sparsity of multi-signal ensembles. This operation makes each node have to transmit a lot of measurements. In this session, we focus on reducing measurements required to transmit at each node by mobile-agent-based data fusion in WSN. A WSN under a DCS framework, as shown in Figure 1, consists of three types of components: Sink, sensor nodes and communication network. With energy restric- tion, sensor nodes can not directly communicate with Sink. For example, the encoding results of a node Sl+1 in the interesting field are transmitted to Sink by multi skips routing in Figure 1. Other nodes do the same works. In Figure 1, we model a WSN as a graph G=(V,E), where S d 1 S 2 S 1 J S − J S 12 d 1, JJ d − 2 J S − 3 S l S 1 l S + ,1 ll d + S d Figure 1. A WSN under DCS framework. Circles denote sensor nodes. The communication distance between node l S and node 1 ({1,,1}) l SlJ + ∈− L is ,1 ll d + and the communica- tion distance between Sink and l S is approximately as S d by the shortest multiple skips routing. For being simple, other links representing the communication links among nodes and Sink are omitted. On the other hand, a route 1 {,,,,,} SJS SSSS LL represents MA data fusion routing.  T. J. WANG ET AL. Copyright © 2009 SciRes. WSN 461 1 {,,,} SL VSSS = L and E denotes an edge set represent- ing the communication links between node-pairs or links between Sink and nodes. In many applications, a distant Sink S S retrieves relevant interesting field information from the sensor nodes. Let ({1,,}) Sl dlL ∈ L be the total communication distance between Sink and a node ({1,,}) l SlL ∈ L by the shortest multiple skips routing. For being simple, Sink is assumed to be far away from the interesting field so that 1 SSLS ddd ≈≈≈ L and ,1 ({1,,1}) Sll ddlL + ∈− ?L , where ,1 ll d + denotes the com- munication distance between node-pairs l S and 1 l S + [13]. We next describe the communication architecture of WSN in Figure 1 to motivate the formulation of two data fusion algorithms for multiple signal ensembles. Assume that a connected subgraph ''' (,) GVEG =⊆ is found, where ' V contains Sink and encode nodes, i.e., '1 {,,,} SJ VSSSV =⊂ L (,) IHJL << , and ' E de- notes a edge set representing all communication links in ' V . For a node ({1,,}) l SlJ ∈ L , its node weight () l wS denotes the amount of data outgoing from l S . An edge ({1,,1}) l eElJ∈∈− L is denoted by 1 (,) lll eSS + =. The weight of edge l e is equivalent to the weight of l S , i.e., ()() ll wewS =. Two metrics, () l te and () l fe , are associated with each edge, describing the transmission cost and fusion cost on the edge, respectively. In many WSN applications, however, the fusion cost may be neg- ligible. For being simple, we do not consider fusion cost in this paper. The unit cost of the link for transmitting data from S1 to 1 l S + is abstracted as ,1 () r lll ced βε + =+ , where β and r are tunable parameters based on the radio propagation [14]. Thus the transmission cost () l te is ()()() lll tecewe = (6) Similarly, we approximately define ({1,,}) Sl elJ ∈ L is the communication links between a node Sl and Sink by the shortest multiple skips routing, and then the trans- mission cost is approximately as ()() SlSl tece = ()({1,,}) Sl welJ ∈ L , where () Sl ce and () Sl we are the unit transmission cost and the weight of Sl e . Obviously, we can get ()() Sll cece ? , for ,1 Sll dd + ? . From above definitions, the total network energy con- sumption in ''' (,) GVE = with different computing models can be calculated. We firstly consider total net- work energy consumption of DCS. According to encod- ing method of a single signal, we assume that individual node ({1,,}) l SlJ ∈ L can gain a sparse coefficient vec- tor ({1,,}) l lJ θ∈ L by projecting a sensing signal ({1,,}) l xlJ ∈ L into a basis matrix Ψ . This operation may consume some computational energy, but it does not affect the total network energy consumption and can be omitted compared to transmission cost. To conveniently explain the network energy consump- tion, we assume that Cl Ω∩Ω=∅ . Single signal recon- struction, therefore, needs l n measurements with nl= c(kc+kl) in a CS framework, and then the total network energy consumption of DCS can be calculated as follows 11 ()()()() JJ r DCSSlSlSCl ll Ccewedckk βε == ==++ ∑∑ (7) where the number of measurements () lCl nckk =+ di- rectly denotes the weight () Sl we . We consider the network energy consumption of two mobile-agent-based data fusion algorithms. Generally speaking, MA is a special kind of software with small size, whose transmission cost can be omitted compared to transmission cost of larger amount of sensing informa- tion. We will not consider MA transmission cost. Sink predetermined the MA routing 1 {,,,,,} SJS SSSS LL by GCF. The detailed mobile-agent-based data fusion process is presented as follows. In initialize stage, MA migrates toS1and obtains meas- urements y1 with 110 |||| nc θ =. Subsequently, it migrates to S2 and finds θc 1 ˆ θ and 2 ˆ θ by contrasting sparse coef- ficients θ1 and θ2. Thus, it can calculate the common measurements yc corresponding to the common sparse component θ1 of the signal ensembles. This means that measurements y1 and y2 can be divided into 11 ˆ C yyy =+ and 22 ˆ C yyy =+ , where 1 ˆ y and 2 ˆ y correspond to the sparse innovation component 1 ˆ θ and 2 ˆ θ . MA carrying measurements C y , 1 ˆ y and 2 ˆ y with 2 ()( C weck =+ 12 ) kk + migrates to 3 S . We then repeat above process on remaining nodes along MA routing until MA returns to Sink. Such process is a typical mobile-agent-based data fusion process. In this paper, we term this process a mobile-agent-based Full Data Fusion (FDF) algorithm compared to the following adaptive data fusion process. The total network energy consumption of FDF is shown as follows 1 1 1 ,11 1 1 ()()()() ()() ()() J FDFllSJSJ l Jr llCl l r SCJ Ccewecewe dckkk dckkk βε βε − = − + = =+ =++++ +++++ ∑ ∑L L (8) We interest in comparing the total energy consumption  T. J. WANG ET AL. Copyright © 2009 SciRes. WSN 462 of DCS and FDF. The total transmission cost can be cal- culated as follows 1 ,1 1 ()(1)() J rr DCSFDFSClll l CCdJckdck βεβε − + = −=+−−+ ∑ 1 ,1 1 (()()) Jrr SClll l dckdck βεβε − + = =+−+ ∑ (9) Note that ,1 Sll dd + ? and Cl kk > , it is easy to get DCSFDF CC> (10) As expected, the inequality (10) means that the total transmission cost of DCS is much larger than FDF. By analyzing FDF in detail, we find another challenge that MA will carry more and more amount of data fusion results along the MA routing. However, data fusion at a node l S ({2,,}) lJ ∈ L only needs the common meas- urements C y . If MA still carries all front innovation measurements 11 ˆ ˆ ,, l yy − L , it is not in favor of saving communication cost. This result brings a question whether we can avoid transmitting an amount of the in- novation measurements. In this regard, we establish the following data fusion algorithm named mobile-agent- based Adaptive Data Fusion (ADF) algorithm. Different from in FDF, MA only carries the common measure- ments C y in ADF. Concretely, MA can calculate ˆ l θ ({2,,}) lJ ∈ L by contrasting C θ and l θ ({2,, l∈ L }) J , when it carrying C y migrates to l S ({2,,}) lJ ∈ L . This allows l y ({2,,}) lJ ∈ L to be divided into ˆ lCl yyy =+ in which the number of the innovation measurement ˆ l y is ˆ ll nck =. MA carrying measurements C y with () lC weck = continuously mi- grates to 1 l S + . On the other hand, measurements ˆ l y are directly transmitted to Sink. We then repeat above proc- ess on remaining nodes along the same MA routing as FDF until MA returns to Sink. Then, the total network energy consumption of ADF is expressed as follows 121 1 ,1 2 ()() (()())()() r ADFC J rrr llCSlSCJ l Cdckk dckdckdckk βε βεβεβε − + = =++ +++++++ ∑(11) We also attend to compare the total energy consumption of FDF and ADF as follows 1 ,1 1 ()0 Jr FDFADFlll l CCdckβε − + = −=+> ∑ (12) i.e., FDFADF CC> (13) From (10) and (13), it can be shown that DCSFDFADF CCC>> (14) From (14), we can easily obtain the benefits of ADF. Firstly, based on DCS, ADF also sufficiently utilizes both temporal (intra-signal) and spatial (inter-signal) correlations of multi-signal ensembles to analyze single signal sparsity structure and multi-signal ensembles jointly sparsity structure. These sparsity structures make it possible to perform data fusion of multi-signal ensem- bles. Second, the innovation measurements are allowed to directly transmit to Sink, while MA only carries the common measurements. It benefits reducing transmis- sion cost. So we can say that ADF provides the optimal strategy for minimizing total transmission measurements and transmission cost compared to DCS and FDF. According to the above discussion, we can reconstruct multi-signal ensembles by solving the following 1 l op- timization problem (P3) 1 min|||| θ subject to ˆ ˆ ˆ y θ =ΦΨ (15) where 1 C J θ θ θ θ = M , 1 ˆ ˆ ˆ C J y y y y = M , 1 00 00 ˆ 00 C J Φ Φ Φ= Φ L L MLOM L , 0 ˆ 0 Ψ Ψ= Ψ L MOM L . We can obtain **** 1 ˆ ˆ (,,,) T CJ xxxx = L with an optimal sparse solution **** 1 (,,,) T CJ θθθθ = L , where ** CC x θ =Ψ and ** ˆ ˆ ,({1,,}) ll xlJ θ=Ψ∈ L . Furthermore, multi-signal ensembles can be reconstructed by *** ˆ , lCl xxx =+ ({1,,}) lJ ∈ L . The above results focus on theoretical analyses of sav- ing transmission cost in ADF. On the other hand, we are interested in comparing the joint reconstruction per- formance of DCS, FDF and ADF. The following simula- tion results are presented illustrating the better joint re- construction performance of ADF. 4. Simulation In our setup, sensor nodes are randomly distributed in a region of a 5050 mm × square. The distance between Sink and the interesting field is 400 S dm =. When con- sidering transmission cost, we set 2 100// pJbitm β=, 2 r = and 100/ nJbit ε= [12] in (6). Furthermore, we consider a series of example multiple signal ensembles 1 ,, J xx K that satisfy the conditions of joint sparsity model. The signal components 1 ˆ ˆ ,,, CJ xxx K are as- sumed to be sparse in Discrete Cosine Transform (DCT) matrix Ψ with sparse parameters 1 ,,, CJ kkk K , re-  T. J. WANG ET AL. Copyright © 2009 SciRes. WSN 463 46810 2 3 4 5 6 7 x 10 7 Number of nodes J (a) The total transmission cost Transmission cost (nJ) 468 10 1 2 3 4 5 Number of nodes J (b) The relative decreasing rate The relative decreasing rate (%) 468 10 0 2 4 6 8 10 12 x 10 -9 Number of nodes J (c) Joint reconstruction error Joint reconstruction error 468 10 100 200 300 400 500 Number of nodes J (d) The total number of measurements Number of measurements DCS FDF ADF The relative decreasing rate DCS ADF&FDF DCS ADF&FDF Figure 2. Effect of the number of nodes on joint reconstruction performance of multiple signal ensembles. We choose signals with 50 m = , 10, C k = 4({1,,}) l klJ =∈ L and C n 440, C k == ˆ 416 ll nk == ({1,,}) lJ ∈ L . (a) The total network transmission cost, (b) The relative decreasing rate, (c) Joint reconstruction error, (d) The total number of measurements. 20 3040 50 60 0.5 1 1.5 2 2.5 3 3.5 4 x 10 8 Number of nodes J (a) The total transmission cost Transmission cost (nJ) 20 3040 50 60 10 12 14 16 18 20 22 24 26 Number of nodes J (b) The relative decreasing rate The relative decreasing rate (%) DCS FDF ADF The relative decreasing rate Figure 3. Effect of the number of nodes on energy consumption of multiple signal ensembles. We choose signals with 50 m = , 10, C k = 4({1,,}) l klJ =∈ L and 4, CC nk = ˆ 4({1,,}) ll nklJ =∈ L . (a) The total transmission cost, (b) The relative decreasing rate.  T. J. WANG ET AL. Copyright © 2009 SciRes. WSN 464 spectively. We assign random Gaussian values to the nonzero coefficients 1 ˆ ˆ ,,, CJ θθθ K , and the locations of nonzero are chosen at random. As a measure of the re- construction performance, the joint reconstruction error * 2 1 |||| J ll l exx = =− ∑ is designed. The Interior Point (IP) method in “Matlab” is used to solve the problem (P2) and the problem (P3). Our first experiment chooses signals with the length 50 m = and sparse parameters 10, C k= 4({1,,}) l klJ =∈ L . Then the corresponding numbers of measurements are chosen by 40, CC nck==ˆ 16({1,,}) ll ncklJ ==∈ L , where 4 c = . Without loss of generality, assume that one measurement produces 8 bit packet [12]. With increasing number of nodes J , the total number of measurements of DCS is greatly larger than FDF and ADF in Figure 2(d). This result causes the transmission cost of DCS also greatly larger than FDF and ADF in Figure 2(a). To fur- ther illustrate the advantage of ADF, we consider the rela- tive decreasing rate calculated as TC(FDF)-TC(ADF) TC(FDF) τ= in which TC(FDF) and TC(ADF) are the total transmis- sion cost of FDF and ADF, respectively. Figure 2(b) clearly shows that the relative decreasing rate linearly increases with J. This means that the energy efficiency of ADF is more distinctness with increasing number of nodes. In Figure 2(c), we emphasize on comparison of reconstruction performance between DCS and ADF (FDF). ADF and FDF enjoy less joint reconstruction errors than DCS, though ADF and FDF use less number of measurements than DCS. So we can say that ADF per- forms much better than DCS and FDF. WSN typically consists of a large number of sensor nodes, so we need consider energy consumption of much more nodes in DCS, FDF and ADF to further observe the advantage of ADF. We repeat the first experiment while the number of nodes varies from 20 to 60. As expected, the transmission cost of DCS is further larger than FDF and ADF as J increases in Figure 3(a). Comparing Figure 3(b) with Figure 2(b), we note that the relative de- creasing rate scales linearly with J . The energy savings of ADF can be as large as 27%. These results identify that ADF is an optimal strategy with minimum total number of measurements and total transmission cost, which con- sist with the front theoretical conclusions in Section 3. Experiments in Figure 3 bring another question whether we can guarantee better joint reconstruction performance as the number of nodes J increases. In our joint decoding simulations, we find that computational time and complexity will greatly increase as J increases. So measurements in Sink should be grouped according to applications. This operation consists with the idea in [9]. In the next experiment, we use J=40 nodes and their measurements are separated in 5 groups. Average recon- struction error 5 1 ()/5 t t ee = = ∑ is designed to measure the 456789 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 x 10 8 Value of k C (a) The total transmission cost Transmission cost (nJ) DCS FDF ADF 456789 1 2 3 4 5 6 7 x 10 -9 Value of k C (b) Average reconstruction error Average reconstruction error DCS ADF&FDF 4 567 8 9 600 800 1000 1200 1400 1600 1800 2000 2200 Value of k C (c) The total number of measurements Number of measurements DCS ADF&FDF Figure 4. Effect of the number of common sparse parameters kc on joint reconstruction of multiple signal ensembles. We choose 50 m = , fix 3({1,,}) l klJ =∈ L , and vary common kc from 4 to 9 and then choose ˆ 4,4({1,,}) CCll nknklJ ==∈ L . (a) The total transmission cost, (b) Average reconstruction errors, (c) The total number of measurements. 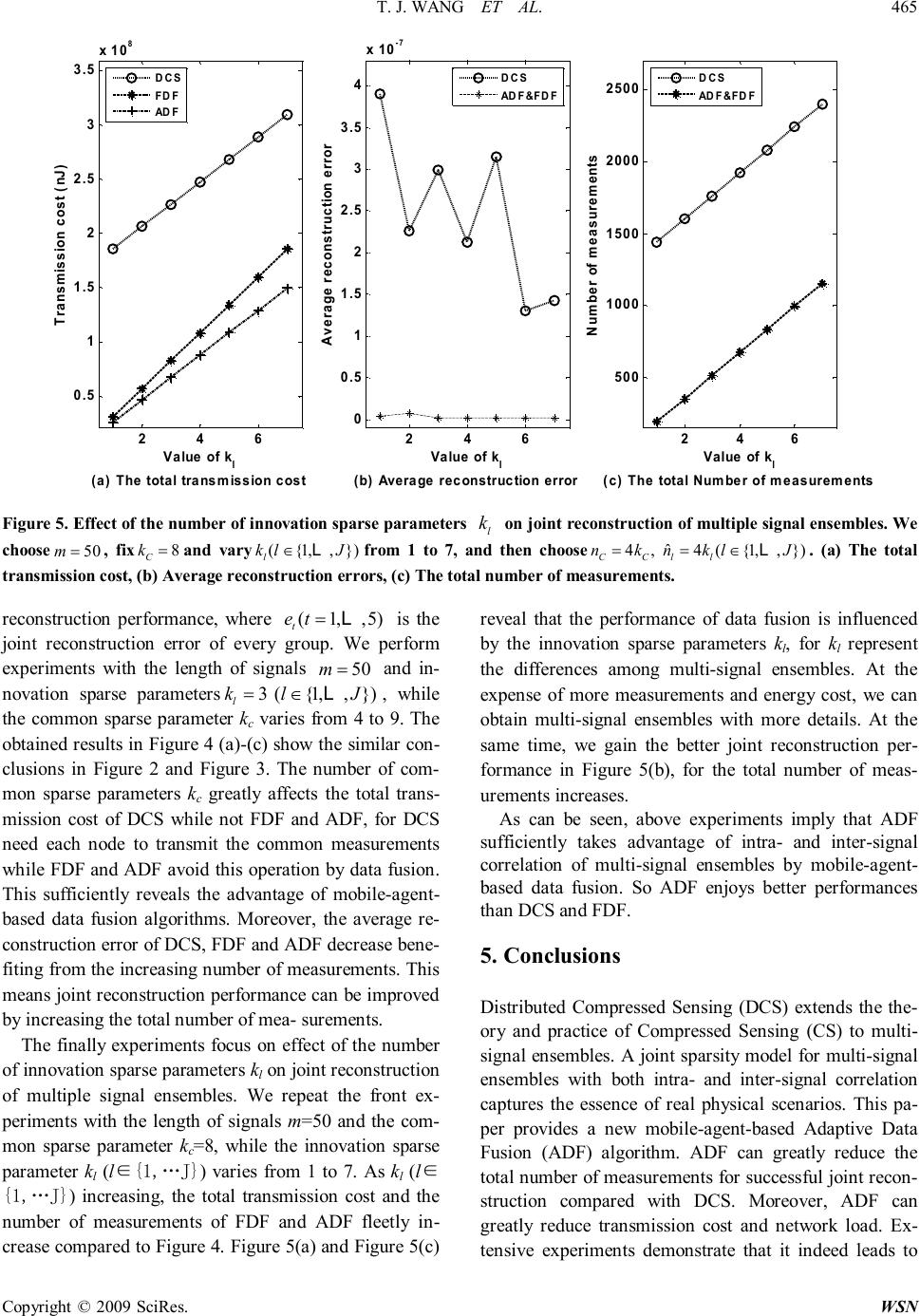 T. J. WANG ET AL. Copyright © 2009 SciRes. WSN 465 2 4 6 0.5 1 1.5 2 2.5 3 3.5 x 10 8 Value of k l (a) The total transmission cost Transmission cost (nJ) 24 6 0 0.5 1 1.5 2 2.5 3 3.5 4 x 10 -7 Value of k l (b) Average reconstruction error Average reconstruction error 246 500 1000 1500 2000 2500 Value of k l (c) The total Number of measurements Number of measurements DCS FDF ADF DCS ADF&FDF DCS ADF&FDF Figure 5. Effect of the number of innovation sparse parameters l k on joint reconstruction of multiple signal ensembles. We choose 50 m = , fix 8 C k = and vary ({1,,}) l klJ ∈ L from 1 to 7, and then choose 4, CC nk = ˆ 4({1,,}) ll nklJ =∈ L . (a) The total transmission cost, (b) Average reconstruction errors, (c) The total number of measurements. reconstruction performance, where (1,,5) t et= L is the joint reconstruction error of every group. We perform experiments with the length of signals 50 m = and in- novation sparse parameters 3 l k = ({1,,}) lJ ∈ L , while the common sparse parameter kc varies from 4 to 9. The obtained results in Figure 4 (a)-(c) show the similar con- clusions in Figure 2 and Figure 3. The number of com- mon sparse parameters kc greatly affects the total trans- mission cost of DCS while not FDF and ADF, for DCS need each node to transmit the common measurements while FDF and ADF avoid this operation by data fusion. This sufficiently reveals the advantage of mobile-agent- based data fusion algorithms. Moreover, the average re- construction error of DCS, FDF and ADF decrease bene- fiting from the increasing number of measurements. This means joint reconstruction performance can be improved by increasing the total number of mea- surements. The finally experiments focus on effect of the number of innovation sparse parameters kl on joint reconstruction of multiple signal ensembles. We repeat the front ex- periments with the length of signals m=50 and the com- mon sparse parameter kc=8, while the innovation sparse parameter kl (l∈{1,…J}) varies from 1 to 7. As kl (l∈ {1,…J}) increasing, the total transmission cost and the number of measurements of FDF and ADF fleetly in- crease compared to Figure 4. Figure 5(a) and Figure 5(c) reveal that the performance of data fusion is influenced by the innovation sparse parameters kl, for kl represent the differences among multi-signal ensembles. At the expense of more measurements and energy cost, we can obtain multi-signal ensembles with more details. At the same time, we gain the better joint reconstruction per- formance in Figure 5(b), for the total number of meas- urements increases. As can be seen, above experiments imply that ADF sufficiently takes advantage of intra- and inter-signal correlation of multi-signal ensembles by mobile-agent- based data fusion. So ADF enjoys better performances than DCS and FDF. 5. Conclusions Distributed Compressed Sensing (DCS) extends the the- ory and practice of Compressed Sensing (CS) to multi- signal ensembles. A joint sparsity model for multi-signal ensembles with both intra- and inter-signal correlation captures the essence of real physical scenarios. This pa- per provides a new mobile-agent-based Adaptive Data Fusion (ADF) algorithm. ADF can greatly reduce the total number of measurements for successful joint recon- struction compared with DCS. Moreover, ADF can greatly reduce transmission cost and network load. Ex- tensive experiments demonstrate that it indeed leads to  T. J. WANG ET AL. Copyright © 2009 SciRes. WSN 466 better performance than DCS and mobile-agent-based Full Data Fusion (FDF). 6. References [1] D. Donoho, “Compressed sensing,” IEEE Trans. on In- formation Theory, Vol. 52, No. 4, pp. 1289–1306, April 2006. [2] Y. Tsaig and D. Donoho, “Extensions of compressed sensing,” Signal Processing, Vol. 86, No. 3, pp. 533–548, March 2006. [3] J. Tropp and A. Gilbert, “Signal recovery from random measurements via orthogonal matching pursuit,” IEEE Transactions on Information Theory, Vol. 53, No. 12, pp. 4655–4666, December 2007. [4] Y. C. Kim, S. S. Narayanan, and K. S. Nayak, “Acceler- ated three-dimensional upper airway MRI using com- pressed sensing,” Magnetic Resonance in Medicine, Vol. 61, pp. 1434–1440, 2009. [5] M. Mishali and Y. C. Eldar, “Blind multi-band signal reconstruction: compressed sensing for analog signals,” IEEE Transactions on Signal Processing, Vol. 57, No. 30, pp. 993–1009, March 2009. [6] M. F. Duarte, S. Sarvotham, D. Baron, and M. B. Wakin, “Distributed compressed sensing of jointly sparse sig- nals,” in 39th Asilomar Conference on Signals, Systems and Computers, pp. 1537–1541, 2005. [7] S. Pradhan and K. Ramchandran, “Distributed source coding using syndromes (DISCUS): Design and con- struction,” IEEE Trans. on Information Theory, Vol. 49, pp. 626–643, 2003. [8] Z. Xiong, A. Liveris, and S. Cheng, “Distributed source coding for sensor networks,” IEEE Signal Processing Magazine, Vol. 21, pp. 80–94, September 2004. [9] D. Baron, M. B. Wakin, M. F. Duarte, S. Sarvotham, and R. G. Baraniuk, “Distributed compressed sensing,” http:// www.dsp.ece.rice.edu/cs. [10] J. Meng, H. Li, and Z. Han, “Sparse event detection in wireless sensor networks using compressive sensing,” The 43rd Annual Conference on Information Sciences and Systems (CISS’09), Baltimore, MD, 2009. [11] A. H. Phan, A. Cichocki, and K. S. Nguyen, “Simple and efficient algorithm for distributed compressed sensing,” IEEE Machine Learning for Signal Processing (MLSP’ 08), pp. 61–66, October 2008. [12] Q. Wu, N. S. V Rao, J. Barhen, S. S. Iyengar, V. K. Vaishnavi, H. Qi, and K. Chakrabarty, “On computing mobile agent routes for data fusion in distributed sensor networks, ” IEEE Transactions on Knowledge and Data Engineering, Vol. 16, No. 6, pp. 740–753, June 2004. [13] W. Bajwa, J. Haupt, and A. Sayeed, “Compressive wire- less sensing,” IPSN’06, Nashville, Tennessee, USA, pp. 19–21, 2006. [14] H. Luo, J. Luo, Y. Liu, and S. K. Das, “Adaptive data fusion for energy efficient routing in wireless sensor networks,” IEEE Transactions on Computers, Vol. 55, No. 10, pp. 1286–1299, October 2006. |