Paper Menu >>
Journal Menu >>
 Wireless Sensor Network, 2009, 1, 446-452 doi:10.4236/wsn.2009.15053 Published Online December 2009 (http://www.scirp.org/journal/wsn). Copyright © 2009 SciRes. WSN Group Target Tracking in WSN Based on Convex Hulls Merging Quanlong LI, Zhijia ZHAO, Xiaofei XU, Tingting ZHOU School of Computer Science and Technology, Harbin Institute of Technology, Harbin, China Email: liquanlong@hit.edu.cn Received July 22, 2009; revised September 21, 2009; accepted September 22, 2009 Abstract When a mass of individual targets move closely, it is unpractical or unnecessary to localize and track every specific target in wireless sensor networks (WSN). However, they can be tracked as a whole by view of group target. In order to decrease the amount of energy spent on active sensing and communications, a flexi- ble boundary detecting model for group target tracking in WSN is proposed, in which, the number of sensors involved in target tracking is adjustable. Unlike traditional one or multiple individual targets, the group target usually occupies a large area. To obtain global estimated position of group target, a divide-merge algorithm using convex hull is designed. In this algorithm, group target’s boundary is divided into several small pieces, and each one is enclosed by a convex hull which is constructed by a cluster of boundary sensors. Then, the information of these small convex hulls is sent back to a sink. Finally, big convex hull merged from these small ones is considered as the group target’s contour. According to our metric of precision evaluation, the simulation experiments confirm the efficiency and accuracy of this algorithm. Keywords: Sensor Networks, Target Tracking, Group Target, Convex Hull 1. Introduction Target tracking is a basic application of WSN, and hence has received a considerable amount of attentions in re- search community [1–5]. However, most of the previous works are limited to investigating point target tracking, where a target is regarded as a point and the localization result is also a point. There are also several methods which have discussed to solve multi-target tracking in WSN, e.g. [4]. However, in order to distinguish different targets, more complicated computations and communica- tions are required, especially when the number of targets is relatively large. In fact, when a group of targets move closely to each others (e.g., motorcade, tank column, or a herd of buffalo) in a sensor network, it is unpractical or pointless to localize every specific target. Therefore, the schemes for tracking point targets in WSN are not suit- able for the cases where there are large quantities of tar- gets moving within a huge area. Instead, it’s more valu- able and feasible to track these targets as a whole called group target. Recently, there are several works on group target tracking in WSN [6–9]. In order to detect chemical pol- lution-like events, [6] proposed a scheme for contour tracking by constructing and maintaining a contour net- work which tightly surrounds the contours and captures the important topological features. A fully distributed protocol, named CollECT, is proposed in [7] to detect and track events in a wireless heterogeneous sensor net- work. A dynamic cluster-based structure is introduced in [8] to detect and track the movements of boundaries of continuous objects in a sensor network. The authors in [9] estimate a group target’s boundary as a circle covering all border sensors. Unlike all the above mentioned revelatory works, we proposed a group target tracking protocol on the bound- ary detecting model, clustering model and group target’s boundary construction algorithm. As a first attempt, the idea of convex hulls merging is used to track group target. In this method, the target tracking process is separated into two steps: boundary dividing and boundary merging. In the first step, the sensors chosen to detect the bound- ary of a group target are divided into multiple clusters and each cluster is responsible for tracking a partial boundary of the group target. In each cluster, there is a cluster head (CH) which gathers information from its cluster members (CM) and aggregates these data to form a local convex hull. Then, the aggregated data is sent back to the sink which is usually monitored by humans. In the second step, when sufficient information of local convex hulls is collected at the sink, it will execute the merging algorithm to combine those convex hulls into a global convex hull which is considered as the whole 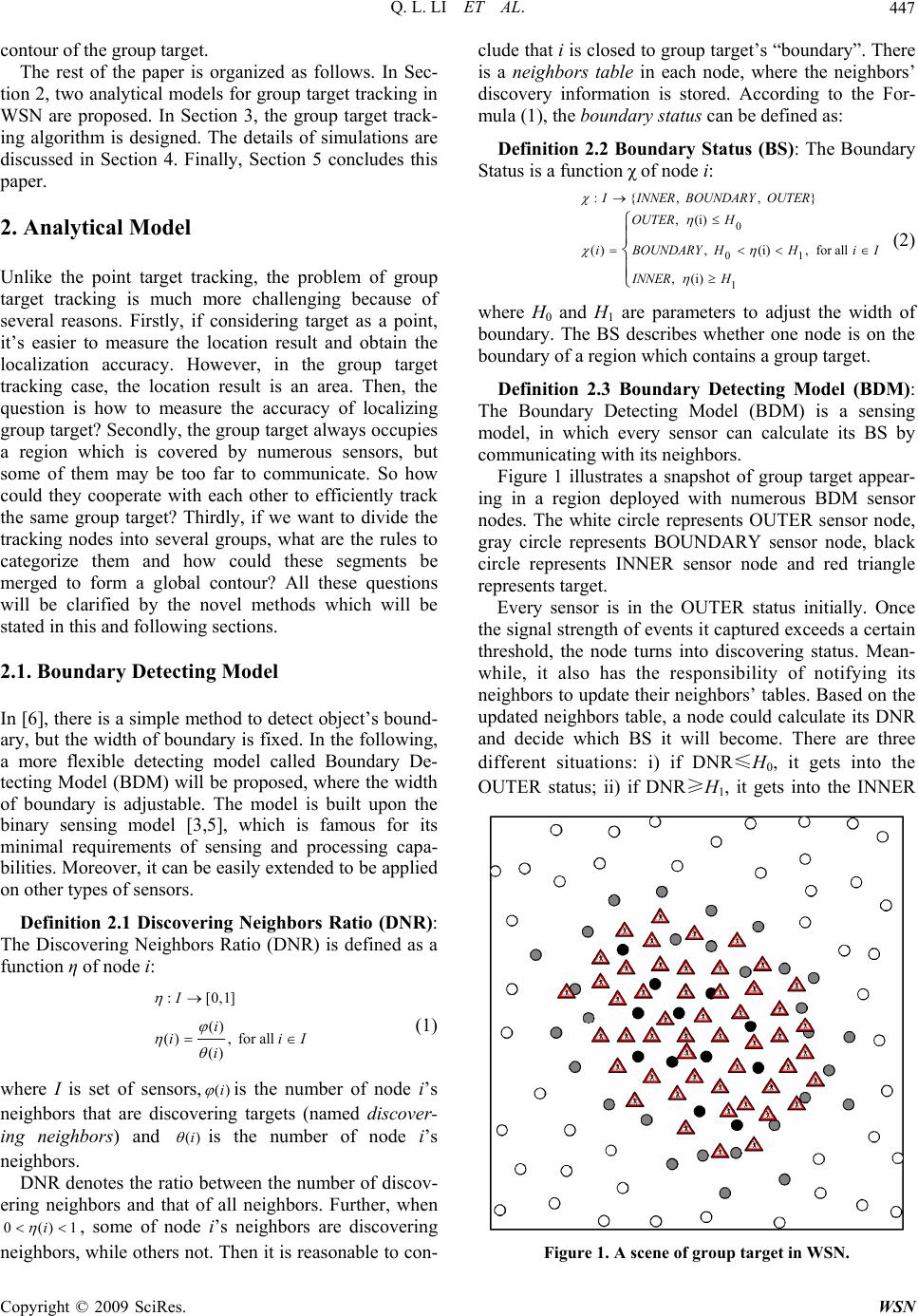 Q. L. LI ET AL.447 contour of the group target. The rest of the paper is organized as follows. In Sec- tion 2, two analytical models for group target tracking in WSN are proposed. In Section 3, the group target track- ing algorithm is designed. The details of simulations are discussed in Section 4. Finally, Section 5 concludes this paper. 2. Analytical Model Unlike the point target tracking, the problem of group target tracking is much more challenging because of several reasons. Firstly, if considering target as a point, it’s easier to measure the location result and obtain the localization accuracy. However, in the group target tracking case, the location result is an area. Then, the question is how to measure the accuracy of localizing group target? Secondly, the group target always occupies a region which is covered by numerous sensors, but some of them may be too far to communicate. So how could they cooperate with each other to efficiently track the same group target? Thirdly, if we want to divide the tracking nodes into several groups, what are the rules to categorize them and how could these segments be merged to form a global contour? All these questions will be clarified by the novel methods which will be stated in this and following sections. 2.1. Boundary Detecting Model In [6], there is a simple method to detect object’s bound- ary, but the width of boundary is fixed. In the following, a more flexible detecting model called Boundary De- tecting Model (BDM) will be proposed, where the width of boundary is adjustable. The model is built upon the binary sensing model [3,5], which is famous for its minimal requirements of sensing and processing capa- bilities. Moreover, it can be easily extended to be applied on other types of sensors. Definition 2.1 Discovering Neighbors Ratio (DNR): The Discovering Neighbors Ratio (DNR) is defined as a function η of node i: :[0,1] () (), for all () I i i i iI (1) where I is set of sensors,()i is the number of node i’s neighbors that are discovering targets (named discover- ing neighbors) and ()i is the number of node i’s neighbors. DNR denotes the ratio between the number of discov- ering neighbors and that of all neighbors. Further, when 0()i1 , some of node i’s neighbors are discovering neighbors, while others not. Then it is reasonable to con- clude that i is closed to group target’s “boundary”. There is a neighbors table in each node, where the neighbors’ discovery information is stored. According to the For- mula (1), the boundary status can be defined as: Definition 2.2 Boundary Status (BS): The Boundary Status is a function χ of node i: 0 01 1 :{, , } , (i) (), (i),for all , (i) IINNER BOUNDARYOUTER OUTER H iBOUNDARYHH i INNER H I (2) where H0 and H1 are parameters to adjust the width of boundary. The BS describes whether one node is on the boundary of a region which contains a group target. Definition 2.3 Boundary Detecting Model (BDM): The Boundary Detecting Model (BDM) is a sensing model, in which every sensor can calculate its BS by communicating with its neighbors. Figure 1 illustrates a snapshot of group target appear- ing in a region deployed with numerous BDM sensor nodes. The white circle represents OUTER sensor node, gray circle represents BOUNDARY sensor node, black circle represents INNER sensor node and red triangle represents target. Every sensor is in the OUTER status initially. Once the signal strength of events it captured exceeds a certain threshold, the node turns into discovering status. Mean- while, it also has the responsibility of notifying its neighbors to update their neighbors’ tables. Based on the updated neighbors table, a node could calculate its DNR and decide which BS it will become. There are three different situations: i) if DNR≤H0, it gets into the OUTER status; ii) if DNR≥H1, it gets into the INNER Figure 1. A scene of group target in WSN. Copyright © 2009 SciRes. WSN  Q. L. LI ET AL. 448 s; iii) otherwise, it gets into th sed in WSN, we th tial to support our algorithm for tracking m Based on Convex .1ocalization Algorithm ed as a aper, our localization result is a nvex hull which is more accurate compared with the rcle in [9]. However, considering the limitation of the -line algorithm to compute local convex hull; vex hull back to a sink; Merge:4:IF (the sink receives sufficient local convex hulls) Execute merging algorithm to compute global convex hull; ELSE Receive local convex hulls. Figure 2. Node’s complete status transition diagram. statu e BOUNDARY status. rough circle. In this p The whole process is completely distributed and only needs local communications among sensors. .2. Boundary Clustering Model 2 Unlike other clustering methods [1] u only needs the BOUNDARY nodes in the clustering process in our clustering model. We divide BOUND- ARY nodes into several clusters without considering the INNER and OUTER nodes. Because the ratio between the number of BOUNDARY nodes and the number of discovering nodes decreases with the group target’s scale increasing, the energy consumption of the whole WSN can be reduced accordingly. At the beginning, all BOUNDARY Nodes stay in the initial status. Then, they get into an election phase. After at, the winner changes into the CH status, while loser gets into the CM status after it chooses one CH as its head. In this section, we introduced two useful models which are essen group target. In Figure 2, complete status transition dia- gram of a node is shown. The dotted lines represent the cluster status transition that runs on each BOUNDARY node, while the solid lines represent the BS transition that runs on every node. 3. racking AlgorithT Hulls Merging . Group Target L3 In the previous work [9], a group target is localiz co ci capability of sensors, we cannot get the accurate convex hull contains all the targets in a group. Instead, we can calculate the convex hull enveloped by all BOUNDARY nodes and it approximates the accurate convex hull. There are some methods [10–12] to calculate the con- vex hull of a set of vertexes. To reduce the computation complexity and energy consumption, two algorithms are selected carefully and some variations and integrations are made necessarily. One of the convex hull algorithms is known as Graham-Scan [10], and the other is an on-line approximate convex hull algorithm [12]. These two algorithms run on the sink and deployed nodes re- spectively. The main idea about the group target local- ization algorithm can be illustrated as follows. First, the convex hull algorithm runs on each CH, which collects the information from all its members and is responsible for sending the result (local convex hull) back to the sink. When the sink gathers enough data of local convex hulls, the merging algorithm will be executed to generate the entire convex hull. The complete algorithm can be de- scribed as follows, named Convex Hulls Merging Local- ization (CHML). Algorithm 1: Convex Hulls Merging Localization Divide:1:CH collects position information from its members; 2:executes on 3:sends local con Copyright © 2009 SciRes. WSN  Q. L. LI ET AL.449 roup target mthe convex re co - s- rithm on Cs mech is a divide-and-conquer algo- rithm [11] faper, we choose an ap d new clusters are dynamically created along the trajectory of the group target. r- e cluster. Considering the dynamic case, when the g oves the clusters around it will keep changing. If algorithm is re-executed for each change, mo mput will be con umed. Ther ation and communication resources efore, it is reasonable to use an on-line algo Hs. In the sink, we use the convex hull thm whirging algori or convex hull. In this p proximation of the on-line algorithm for its simplicity. The error of this algorithm is guaranteed to be very low. The time-complexities of these two algorithms are O(n) and O(nlogn) respectively, where n is the number of BOUNDARY nodes in total. So the total time-complex- ity of our algorithm is O(nlogn). Refer to appendix for details of the algorithms. 3.2. Cluster Maintenance Algorithm When a group target is moving, some previously con- structed clusters are destroyed and some new ones will be formed. In order to track the group target continu- ously, clusters must be maintained so that out-of-date clusters are eliminated an Consider a newly formed cluster. When the group ta et is moving, some new nodes will join thg Meanwhile, some old ones quit. So the topology of the cluster is changing and the original CH may not be able to continue playing as a cluster head. For instance, some new nodes may be too far away to achieve the commu- nication with the CH. In this case, a new CH will be se- lected. Following criterions need to be considered when a new CH is elected. First, the nearer a node is to the cen- ter of the cluster, the more suitable it is to become a CH [8]. Therefore, the sum of the distances from the CH to its members will be the smallest one and it will help to reduce the communication consumption and delay. Fur- thermore, it will ensure the cluster moves in a direction which the group target towards. Second, the convex hull information owned by the original CH is useful to the new CH. For this reason, a node should better be chosen if it could inherit this information easily. Based on the two criterions, a weighted election method is proposed. Let Cj be a cluster, j CI, then for any i, j iC, the distance from i to its cluster’s topology center is di, 22 .... 11 (())(()) d10 || || jj iii ii iC iC jj xxyydaaaa CC (3) where ai is the position of node i. Then the weight of node i is Wi, (4) w1 an if node i is elected as a new CH. So when a ARY node participates, or an old one quits, the CH will compute the weight of each node in its ter. If there is a node whose weight is bigger than that of 4. Performance Evaluation 12 1 1 ii Wwdwn where d w2 are weights of factors, n is the number of lost nodes new BOUND clus- the previous CH, this node will take the old CH’s place and become the new CH. 4.1. Simulation Setup In the simulation, binary sensors are randomly scattered with a uniform distribution in the monitoring region which is a rectangle area with the size of 1000m700m . The communication radius and sensing radius are changed according to the deployment density of sensors onitoring region. ving at the speed of gets into one sensor’s sensing s is Rsense, the sensor will dis- ex hull and polygon PE be its esti- error is defined as: to guarantee enough coverage of the m We simulate a group target mo 5m/s. If there is any target area whose sensing radiu cover it without knowing the number of targets or their accurate positions. 4.2. Evaluation Criteria In a point target tracking evaluation, the localization re- sult is a point and the error can be defined as the distance between the actual position and estimated position. However, the group target localization result is a polygon area. To measure the localization accuracy, we propose the following evaluation criteria. Let polygon PA be a group target’s conv mated convex hull. Then, the 100% EA PP eS (5) where S represents the area of a polygon. Apparently, 01e EA EA PP PP SS is satisfied. This error definition not only re- flects the coverage extent of PE over PA, but also avoids PE to be too large. So the lower the e is, the better the performance can be achieved. By varying the number of deployed sensors and their sensing radiuses, the impact of sensor density and sensing radius on the accuracy of estimated convex hull is investigated. into the monitoring region and that of leaving the area. 4.3. Simulation Results Figure 3(a) shows the tracking accuracy during a com- plete tracking process. It can be seen that, from time 0s to 10s, the accuracy increases sharply. But at the end of the process, the different situations happen. In fact, these variations reflect the process of a group target getting Copyright © 2009 SciRes. WSN  Q. L. LI ET AL. 450 Figure 3(a). Tracking accuracy during a complete tracking process. Figure 3(c). Impact of sensors’ density on accuracy. In Figure 3(b), accuracies of group target tracking al- gorithm under different sensor deployment densities are presented. This figure indicates that, when the sensors’ density is fixed, the performance gets better as the sens- ing radius decreases. But this situation changes when Rsense =10. At this time, the tracking results are unstable. The reason is that, as sensing radius is decreasing, the degree of network coverage also reduces, which affect the tracking accuracy of our algorithm. Ted Figure 3(c). To be reasonable, no matter how many se we can find that he impact of sensors’ density on accuracy is show in nsors are there, the coverage degree should be guaran- teed. The simulation results show that the more sensors are deployed, the better performance is. By varying the number of targets in the group target,its impact on ac- curacy is examined. Figure 3(d) shows that, when the number of targets increases, the accuracy of tracking algorithm improves accordingly. Figure 4 illustrates a segment of trajectory in a com- plete tracking process. From this figure, Figure 3(b). Accuracies of group target tracking under different sensor deployment densities. Figure 3(d). Number of targets and tracking accuracy. Figure 4. Comparison between actual boundary and esti- mated one. the estimated boundary is closed to actual boundary as the group target moving. Copyright © 2009 SciRes. WSN  Q. L. LI ET AL. Copyright © 2009 SciRes. WSN 451 5. Conclusions The problem of group target tracking in wireless sensor networks is fully investigated in this paper. To ach the group target tracking goal, a flexible group targ boundary detecting model is proposed. Moreover, utiliz- ing a computing geometry conception—convex hull, a novel divide-merge group target tracking algorith proposed to solve this challenging problem. By an ing the experimental results from simulations, the group target tracking performance is evaluated. The results show that the proposed algorithm is effective and effi- cient. n, J. C. Hou, and L. Sha, “Dynamic clusteri G. Cao. “DCTC: Dynamic convo , and S. Suri. ao, and J. S. B. Mitchell, CT: Collaborative event detection and tracking in . Kesidis, “Dynamic Computational geometry in C,” and analysis of algorithms,” Addison- sor ieve et “Target tracking with binary proximity sensors: Funda- mental limits, minimal descirptions, and algorithms,” In Proceedings of ACM SenSys, 2006. [6] X. Zhu, R. Sarkar, J. G m is alyz- “Light-weight contour tracking in wireless sensor net- works,” In Proceedings of IEEE INFOCOM, pp. 1849– 1857, 2008. [7] K. P. Shih, S. S. Wang, P. H. Yang, and C. C. Chang, “CollE 6. References 1] W. Che[ng for cluster structure for object detection and tracking in wireless ad-hoc sensor networks,” IEEE International Conference on Communications, Paris, FRANCE, June 20–24, 2004. acoustic target tracking in wireless sensor networks,” IEEE Transactions on Mobile Computing, Vol. 3, No. 3, 004. pp. 258–271, 2 2] W. Zhang and[y [ tree-based collaboration for target tracking in sensor networks,” IEEE Transactions on Wireless Communica- tions, Vol. 3, No. 5, pp. 1689–1701, 2004. [3] J. Aslam, Z. Butler, F. Constantin, V. Crespi, G. Cybenko, and D. Rus, “Tracking a moving object with a binary sen- sor network,” ACM Sensys’03, Los Angeles, California, USA, pp. 150–161, 2003. [4] J. Singh, U. Madhow, R. Kumar, S. Suri, and R. Cagley, “Tracking multiple targets using binary proximity sen- s,” In Proceedings of the 6th International Conference on Information Processing In Sensor Networks, April 2007. [5] N. Shrivastava, R. Mudumbai, U. Madhow wireless heterogeneous sensor networks,” In Proceedings of the 11th IEEE Symposium on Computers and Com- munications (ISCC’06). [8] X. Ji, H. Zha, John J. Metzner, and G 9] D. Cao, B. Jin, and J. Cao, “On group target tracking with binary sensor networks,” In Proceedings of the 5th IEEE International Conference on Mobile Ad Hoc and Sensor System (MASS), pp. 334–339, 2008. [10] O’ Rourke and Joseph, “ China Machine Press, 2005. [11] T. H. Cormen, C. E. Leiseron, and R. L. Rivest. “Introduc- tion to algorithms,” The MIT Press, pp. 947–956, 2002. [12] R. C. T. Lee, S. S. Tseng, and R. C. Chang, “Introduction to the design Wesley, Chapter 12.6, 2002.  Q. L. LI ET AL. 452 Appendix Dynamic approximation convex hull algorithm: Input: A sequence of points with operators , and the number m of pairs of parallel lines being used. Output: A sequence of approximate convex hulls where is covering the reserve here Initialization: Construct m pairs of parallel lines with I. 112 2 (,), (,),p operatorpoperator 12 ,,aa, points i a , l p , w d 12 ,,ppli. slopes 0,tan(/),tan(2/), ,mm tan((1) /)mm respec- ti f vely antersect at the ir with ope rs of par- IF de , Stop; d locate all lines so that th rator is1 (, )p insert . ey all in st input point1 p. Set i=1, i.e. the current input point . IF (p is between each of the m paiStep 1i allel lines) (operator= lete) delete the point Pi, 1ll ELSE insert the point Pi,1ll, Stop; ELSE IF (operator=delete) delete the point Pi, 1ll; ELSE insert the point Pi, 1ll,'i p p ; Step 2. Move e the linnearest to point, without g Step 3. Con nectspect in the clockwise fashion and denote this ap- proximate convex hull as Step 4. If no other point will be input, then stop; oth- erwise, set i=i+1 and receive the next input point as Pi. Go to Step 1. raham-Scan(Q) // Algorithm which will be Step 1.let 'p changin its slope, to touch'pand associate 'pwith this line. struct an approximate convex hull by con- ing the 2m points with reto each line j a. II. G run on the sink 0 p be the point in Q with the minimum y a -coordinate, or the leftmost such point in case of tie; Step 2. let 12 ,,, m p ppbe the remaining points in Q, orted by polar angle in counterclockwise order round 0 s a p (if more than one point has the same angle, remove all but the one that is farthest from 0 p ); tep 3. PUSH(S0 p ,S); Step 4. PUSH(1 p ,S); 5. PUSH(2 Step p ,S); Step 6. for(i=3, i<=m, i++) ile(the angle Step 8. POS(S Step Step 10turn S; Step 7. {whformed by points NEXT-TO-TOP(S), TOP(S), and Pi makes a nonleft turn) ); 9. PUSH(Pi, S); } . re Copyright © 2009 SciRes. WSN |