Int'l J. of Communications, Network and System Sciences
Vol.3 No.6(2010), Article ID:2009,9 pages DOI:10.4236/ijcns.2010.36076
Flocking Control of a Group of Agents Using a Fuzzy-Logic-Based Attractive/Repulsive Function
Institute of Nonlinear and Complex Systems, China Three Gorges University, Yichang, China
E-mail: {yuhui, jiguijian, Shenyj}@ctgu.edu.cn
Received March 5, 2010; revised April 7, 2010; accepted May 17, 2010
Keywords: Flocking, Cooperative Control, Multi-Agent System, Fuzzy Logic
Abstract
In this study, a novel procedure is presented for control and analysis of a group of autonomous agents with point mass dynamics achieving flocking motion by using a fuzzy-logic-based attractive/repulsive function. Two cooperative control laws are proposed for a group of autonomous agents to achieve flocking formations related to two different centers (mass center and geometric center) of the flock. The first one is designed for flocking motion guided at mass center and the other for geometric center. A virtual agent is introduced to represent a group objective for tracking purposes. Smooth graph Laplacian is introduced to overcome the difficulties in theoretical analysis. A new fuzzy-logic-based attractive/repulsive function is proposed for separation and cohesion control among agents. The theoretical results are presented to indicate the stability (separation, collision avoidance and velocity matching) of the control systems. Finally, simulation example is demonstrated to validate the theoretical results.
1. Introduction
A special behavior of large number of interacting dynamic agents called “flocking” has attracted many researchers from diverse fields of scientific and engineering disciplines. Examples of this behavior in the nature include flocks of birds, schools of fish, herds of animals, and colonies of bacteria.
In 1986, Reynolds introduced three heuristic rules that leads to the creation of the first computer animation model of flocking [1]. It should be noticed that these rules are also known as cohesion, separation, and alignment rules respectively in the literature. Similar problems have become a major thrust in systems and control theory, in the context of cooperative control, distributed control of multiple vehicles and formation control. A research field which is tightly related to the theme of this paper is that of consensus seeking of autonomous multi-agent. In this case, multi-agent achieve consensus if their associated state variables converge to a common value [2-5]. In the meantime, an important progression has been achieved on synchronous and/or asynchronous swarm stability analysis [6-8]. Pioneering works [9-11] on flocking motion of particle systems have properly explained the heuristic rules embedded in Reynolds model. One of the important works in [9-11] is the design of attractive/repulsive potential function. In [12], Gu and Hu proposed a flocking control algorithm for fixed and switching network of multi-agent respectively, in which the attractive/repulsive potential was designed using fuzzy logic. Stability is analyzed using the classical Lyapunov theory in fixed network and non-smooth analysis in dynamical network, respectively.
In this study, the flocking behaviors of multi-agent systems with point mass dynamics and dynamical network topology are investigated. The major difference or contribution compared with previous works, for example [9-12], can be outlined as follows. First of all, the new results are based on more general particle model and the flocking motion is centered at different centers, e.g., mass center and geometric center. Secondly, two new cooperative control laws are proposed such that desired collective behaviors (separation, collision avoidance and velocity matching) can be achieved. Finally, smooth graph Laplacian and smooth attractive/repulsive potential based on fuzzy logic are proposed to overcome the difficulties in theoretical analysis and for separation and cohesion control between agents, respectively. In contrast to [12], owing to the design of smooth attractive/repulsive potential based on fuzzy logic and application of smooth graph Laplacian, stability analysis both in fixed and dynamical networks can easily conducted using classical Lyapunov theory.
The rest of the paper is organized as follows. In Section 2, the problems are formulated based on algebraic graph theory, preliminaries about smooth collective potential function and fuzzy control function are provided. In Section 3, two flocking control laws based on fuzzy logic are proposed. Stability analysis is given in Section 4. Simulation results are provided in Section 5. Finally, concluding remarks are made in Section 6.
2. Problem Formulation and Preliminaries
2.1. System Dynamics
Consider a group of  agents (or particles) moving in an
agents (or particles) moving in an  -dimensional Euclidean space, each has point mass dynamics described by
-dimensional Euclidean space, each has point mass dynamics described by
 (1)
(1)
where  is the position vector of agent
is the position vector of agent ,
,  is its velocity vector,
is its velocity vector,  is its mass,
is its mass,  is the control input acting on agent
is the control input acting on agent ,
,  is the velocity damping gain, and
is the velocity damping gain, and  is the velocity damping term.
is the velocity damping term.
For flocking motion of a group of agents, the control objectives are to design flocking control laws such that:
a) The distances  between any two neighbor agents are asymptotically convergent to a desired constant value
between any two neighbor agents are asymptotically convergent to a desired constant value ;
;
b) The velocity vectors  reach consensus, i.e.,
reach consensus, i.e.,  , where
, where  is the velocity vector of the center of a group of agents and
is the velocity vector of the center of a group of agents and  is the velocity vector of a virtual agent;
is the velocity vector of a virtual agent;
c) No collision between agents occurs during the flocking.
The theoretical framework presented in this paper for creation of flocking behavior relies on a number of fundamental concepts in algebraic graph theory [13] that are described below.
A weighted undirected graph will be used to model the interaction topology among agents. An undirected graph  consists of a set of vertices
consists of a set of vertices  and a set of edges
and a set of edges , where an edge is an unordered pair of distinct vertices in
, where an edge is an unordered pair of distinct vertices in . In graph
. In graph , the
, the  th node represents agent
th node represents agent  and a edge denoted as
and a edge denoted as  or
or  represents an information exchange link between agent
represents an information exchange link between agent and
and . The adjacency matrix
. The adjacency matrix  of a graph
of a graph  is a matrix with nonzero elements satisfying the property
is a matrix with nonzero elements satisfying the property . Throughout the paper, for simplicity of notation, we assume
. Throughout the paper, for simplicity of notation, we assume  for all
for all  (or the graphs have no loops). The graph is called weighted whenever the elements of its adjacency matrix are other than just
(or the graphs have no loops). The graph is called weighted whenever the elements of its adjacency matrix are other than just  elements. Here, weighted undirected graph is used in this paper. The degree matrix of
elements. Here, weighted undirected graph is used in this paper. The degree matrix of  is a diagonal matrix
is a diagonal matrix  with diagonal elements
with diagonal elements  that are row-sums of
that are row-sums of . The graph Laplacian is defined as
. The graph Laplacian is defined as . The Laplacian matrix
. The Laplacian matrix  always has a right eigenvector
always has a right eigenvector  associated with eigenvalue
associated with eigenvalue . A graph
. A graph  is called undirected if and only if the adjacency matrix
is called undirected if and only if the adjacency matrix  is symmetric. The set of neighbors of node
is symmetric. The set of neighbors of node  is defined by
is defined by
 (2)
(2)
In fixed network topology, agent  can range or communication with a fixed set of neighbors. Therefore, the set
can range or communication with a fixed set of neighbors. Therefore, the set  is time invariant. However, in dynamical or switching network topology, the set of neighbors of agent
is time invariant. However, in dynamical or switching network topology, the set of neighbors of agent  is time-varying due to limited communication.
is time-varying due to limited communication.
2.2. Smooth Collective Potential Function
Smooth collective potential function is originally proposed in [11]. The following is a brief introduction about it. For more detailed information, the reader is referred to [11].
In order to construct smooth collective potential function, a map  is defined as
is defined as
with a parameter . Note that
. Note that  is differentiable everywhere, but
is differentiable everywhere, but  is not differentiable at
is not differentiable at .
.
Smooth adjacency matrix elements are constructed by using a scalar function  that smoothly varies between
that smoothly varies between  and
and . One possible choice is as follows:
. One possible choice is as follows:
 (3)
(3)
where . Using this function, a position-dependent adjacency matrix
. Using this function, a position-dependent adjacency matrix  can be defined as
can be defined as with
with
 (4)
(4)
and position-dependent Laplacian matrix as 
 , where
, where ,
,  ,
,  denote the interaction range between two agents.
denote the interaction range between two agents.
The set of neighbors of agent  is defined by
is defined by
 .
.
By the definition of , the control objective (1) can be expressed as following algebraic constraint:
, the control objective (1) can be expressed as following algebraic constraint:
 (5)
(5)
where .
.
Given a interaction range , a neighboring graph
, a neighboring graph  can be specified by
can be specified by  and the set of edges
and the set of edges , that clearly depends on
, that clearly depends on .
.
A smooth collective potential function has the form:
where  is a smooth pairwise attractive/repulsive potential with a finite cut-off at
is a smooth pairwise attractive/repulsive potential with a finite cut-off at  and a global minimum at
and a global minimum at . In order to construct a smooth potential function
. In order to construct a smooth potential function , denote
, denote  and define this function as:
and define this function as:
 (6)
(6)
where  is some function to be designed. Obviously, function
is some function to be designed. Obviously, function  should vanish for all
should vanish for all .
.
In the next section, the function  is implemented using fuzzy logic.
is implemented using fuzzy logic.
2.3. Preliminaries of Fuzzy Control Function
To the best of our knowledge, for flocking control, [12] is the first paper in which attractive/repulsive function is designed using fuzzy logic. In this section, we provide a brief introduction about fuzzy control function [12].
A set of fuzzy logic rules performs a mapping from an input to a deterministic control
to a deterministic control , i.e., fuzzy control function. For the kth dimension state
, i.e., fuzzy control function. For the kth dimension state , agent
, agent  uses states
uses states  to build a P-dimension vector
to build a P-dimension vector 
 as fuzzy input. The corresponding fuzzy input set is
as fuzzy input. The corresponding fuzzy input set is . A fuzzy rule between agent
. A fuzzy rule between agent  and agent
and agent  can be expressed as:
can be expressed as:
where ,
,  is the number of fuzzy rules.
is the number of fuzzy rules.
Use the Gaussian function to define the membership function of fuzzy set :
: , where
, where  are the mean and variance, respectively. The activation degree of rule
are the mean and variance, respectively. The activation degree of rule  is calculated by product operation:
is calculated by product operation:

The crisp output  is calculated by center of area method:
is calculated by center of area method:
3. Flocking Motion Guided at Mass Center and/or Geometric Center
In this section, two cooperative control algorithms are developed for flocking guided at mass center and geometric center respectively. In flocking motion, each agent applies a control input that consists of four terms:
 (7)
(7)
where  is a gradient-based term and will be designed using fuzzy logic,
is a gradient-based term and will be designed using fuzzy logic,  is a velocity consensus/alignment term,
is a velocity consensus/alignment term,  is a navigation term due to a group objective and
is a navigation term due to a group objective and  is the velocity damping term.
is the velocity damping term.
Similar to [9-11], the velocity consensus/alignment term  is in the form
is in the form
 (8)
(8)
and
 (9)
(9)
for flocking motion guided at mass center and geometric center, respectively. The navigation term  is designed in the following form
is designed in the following form
 (10)
(10)
The pair  is the desired state vector of the group center (mass center or geometric center). The desired state of the group center can be described by
is the desired state vector of the group center (mass center or geometric center). The desired state of the group center can be described by
 (11)
(11)
3.1. Fuzzy Attractive/Repulsive Control
For state vector , the fuzzy input
, the fuzzy input  consists of
consists of  and
and , where
, where , i.e.,
, i.e.,  and
and 
 . The fuzzy output is defined as
. The fuzzy output is defined as

which implies . A fuzzy rule
. A fuzzy rule  is then defined as:
is then defined as:

Therefore,
The fuzzy output vector between agent  and
and  is
is

where 
Denote the gradient of the attractive/repulsive potential  as:
as:
and denote , we have
, we have
 (12)
(12)
Therefore, gradient-based control term can be designed as
 (13)
(13)
3.2. Flocking Control guided at Group Centers
Consider the multi-agent motion relative to the group center  (the mass center
(the mass center or geometric center
or geometric center ). The position and velocity vectors of agent
). The position and velocity vectors of agent  relative to
relative to is denoted by
is denoted by and
and , the collective state vectors of all agents relative to
, the collective state vectors of all agents relative to by
by  and
and , where
, where or
or ,
,  ,
,  is kronecker product.
is kronecker product.
The mass center of all agents is defined as
 (14)
(14)
Note that
 (15)
(15)
and due to ,
,  ,
,  , we have
, we have
Then, the dynamic of mass center is given by
 (16)
(16)
Denote , the relative dynamic of center of mass is given by
, the relative dynamic of center of mass is given by
 (17)
(17)
where 
We can choose proper control parameters  and
and  such that matrix
such that matrix  is Hurwitz stable, and from Lyapunov theory, for given positive matrix
is Hurwitz stable, and from Lyapunov theory, for given positive matrix , there exists a positive definite matrix
, there exists a positive definite matrix , such that:
, such that:
 (18)
(18)
For creation of flocking motion relative to mass center, we propose following control laws:
 (19)
(19)
where .
.
The geometric center of all agents is defined as
 (20)
(20)
Similarly, for geometric center, we propose following control law:
 (21)
(21)
4. Analysis of Stability
In this section, we present our main results for flocking in multi-agent networks with dynamical topology, and conduct stability analysis based on classical Lyapunov theory and LaSalle's invariance principle. In [12], owing to the discontinuity of collective potential function in the case of dynamical topology, stability analysis is done using classical Lyapunov theory in fixed networks and nonsmooth analysis theory, which is difficult to understand for engineers in real applications, in dynamical networks, respectively. In our paper, due to the design of smooth collective potential function, in both cases of fixed network and dynamical network, stability analysis can be conducted based on classical Lyapunov theory and LaSalle's invariance principle.
For the collective motion relative to mass center , define energy function
, define energy function
 (22)
(22)
where,
 is the parameter of the navigation term.
is the parameter of the navigation term.
Applying control law (19) to system (1), following theorem is held to explain the emergence of flocking behaviors of agents guided at center of mass .
.
Theorem 1 Consider a group of agents applying control law (19) with proper selected parameters  satisfying (18) to system (1). Assume that the initial value
satisfying (18) to system (1). Assume that the initial value  is finite. Then, the following statements hold.
is finite. Then, the following statements hold.
(i) The solution of system (1) asymptotically converges to an equilibrium point  where
where  a local minima of is
a local minima of is .
.
(ii) The velocities of all agents asymptotically converge to the velocity of mass center , and the velocity of mass center
, and the velocity of mass center  asymptotically converge to the desired velocity
asymptotically converge to the desired velocity , i.e.,
, i.e., .
.
(iii) No collision between agents occurs during the flocking.
Proof: First of all, we explain the fact that the energy function  is positive definite.
is positive definite.
Obviously,  and
and  is positive. Therefore, the positive definiteness of energy function
is positive. Therefore, the positive definiteness of energy function  is equivalent to that of
is equivalent to that of . By similar analysis to theorem 1 of [12],
. By similar analysis to theorem 1 of [12],  can be designed positive definite by using proper fuzzy rules, i.e.,
can be designed positive definite by using proper fuzzy rules, i.e.,  can be designed positive definite.
can be designed positive definite.
Secondly, the derivative of the energy function  is seminegative definite.
is seminegative definite.
 (23)
(23)
 (24)
(24)
Due to , we have
, we have

From (15) and note that
We have

Then,
 (25)
(25)
where .
.
From (17), we have
 (26)
(26)
From (23) to (26), we have
 (27)
(27)
Part (i) and part (ii) follow from LaSalle's invariance principle. As  is seminegative definite, given
is seminegative definite, given ,
,  is an invariant set. From
is an invariant set. From , we have
, we have . Therefore, both
. Therefore, both  and
and  are bounded. Given the desired state
are bounded. Given the desired state  is bounded and from the definition of
is bounded and from the definition of  and
and , we know
, we know  is bounded.
is bounded.
From LaSalle's invariance principle, all states starting in converge to the largest invariant set
converge to the largest invariant set . Hence, all states converge to the largest invariant set
. Hence, all states converge to the largest invariant set 
 asymptotically, i.e., all agent velocities
asymptotically, i.e., all agent velocities  converge to the velocity of center of mass,
converge to the velocity of center of mass, , and the position and velocity vectors of center of mass,
, and the position and velocity vectors of center of mass,  , converge to the desired states,
, converge to the desired states,  , asymptotically.
, asymptotically.
Furthermore, in stable state, . There is a equilibrium point at
. There is a equilibrium point at  where
where  is a local minima of
is a local minima of .
.
Finally, we prove part (iii) by contradiction. Assume there exists a time  when two distinct agents
when two distinct agents  collide, i.e.,
collide, i.e., . For all
. For all , we have
, we have
At , defining
, defining  larger than
larger than  leads to
leads to , which is in contradiction with the invariant set
, which is in contradiction with the invariant set . Therefore, no two agents collide at any time
. Therefore, no two agents collide at any time .
.
Remark: From theorem 1, control objective a) and b) are achieved, but the geometric characterization of local minima  of
of  is not possible satisfying the algebraic constraint (5). In [11], the authors pose two conjectures that establish the close relationship between geometric and graph theoretic properties of any local minima of
is not possible satisfying the algebraic constraint (5). In [11], the authors pose two conjectures that establish the close relationship between geometric and graph theoretic properties of any local minima of  and features of flocks. Based on the conjectures in [11], we can conclude that the local minima
and features of flocks. Based on the conjectures in [11], we can conclude that the local minima  of
of  is a so-called quasi-
is a so-called quasi- -lattice [11], i.e.,
-lattice [11], i.e.,
 . Obviously, it is very close to the conformation satisfying algebraic constraint (5).
. Obviously, it is very close to the conformation satisfying algebraic constraint (5).
When control laws (21) applied to system (1), similar theorem is established to explain the emergence of flocking behavior of agents guided at geometric center.
For the collective motion relative to geometric center , define energy function
, define energy function

Where

 ,
,  is the parameter of the navigation term,
is the parameter of the navigation term, .
.
We have following theorem.
Theorem 2 Consider a group of agents applying control law (21) with proper selected parameters  satisfying (18) to system (1). Assume that the initial value
satisfying (18) to system (1). Assume that the initial value is finite. Then, the following statements hold.
is finite. Then, the following statements hold.
1) The solution of system (1) asymptotically converges to an equilibrium point  where
where  a local minima of is
a local minima of is .
.
2) The velocities of all agents asymptotically converge to the velocity of geometric center , and the velocity of geometric center
, and the velocity of geometric center  asymptotically converge to the desired velocity
asymptotically converge to the desired velocity , i.e.,
, i.e.,
 .
.
3) No collision between agents occurs during the flocking.
Proof: The proof of this theorem is similar to that of theorem 1.
5. Simulation
In this section, mass center guided flocking motion is simulated in 2-dimentional space. The following parameters were fixed throughout the simulation: , and
, and  for
for . Eight fuzzy sets are designed for the fuzzy control input
. Eight fuzzy sets are designed for the fuzzy control input . They are LN, N, SN, Z, SP, P, LP, and PP as shown in Figure 1. Eight fuzzy rules are designed as follows:
. They are LN, N, SN, Z, SP, P, LP, and PP as shown in Figure 1. Eight fuzzy rules are designed as follows:
IF  is LN THEN
is LN THEN
 ;
;
IF  is N THEN
is N THEN
 ;
;
IF  is SN THEN
is SN THEN
 ;
;
IF  is Z THEN
is Z THEN ;
;
IF  is SP THEN
is SP THEN
 ;
;
IF  is P THEN
is P THEN
 ;
;
IF  is LP THEN
is LP THEN
 ;
;
IF  is PP THEN
is PP THEN
 .
.
Control parameters  are selected to be
are selected to be
 . The two eigenvalues of matrix
. The two eigenvalues of matrix  are
are  and
and . Therefore, matrix
. Therefore, matrix  is Hurwitzstable. Let
is Hurwitzstable. Let , using Matlab command lyap(K,Q), we obtain positive definite matrix
, using Matlab command lyap(K,Q), we obtain positive definite matrix .
.
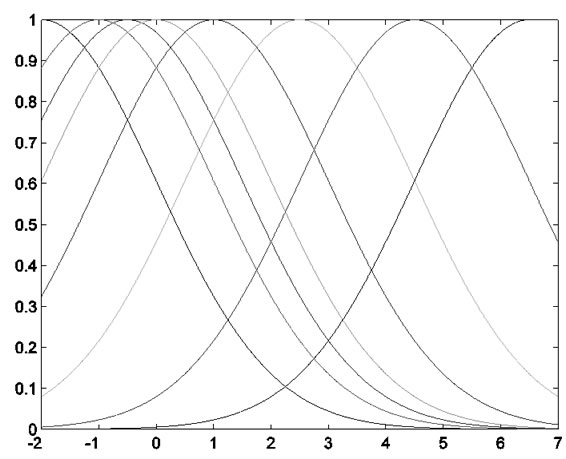
Figure 1. Fuzzy membership function.
Simulation is calculated within 20 seconds time by using Matlab Simulink. In addition, the position of each agent is marked with a right triangle sign.
Figures 2 to 5 show the simulation results within 2-D flocking using control law (19) for 50 agents. Figures 2 to 4 show snapshots of 2-D flocking at time , and
, and  (sec). The initial position and initial velocity coordinates were uniformly chosen in the random domain of
(sec). The initial position and initial velocity coordinates were uniformly chosen in the random domain of  and
and , respectively. The mass of each agent was also uniformly chosen in a random domain of [0.5, 1.5]. A steady configuration was formed
, respectively. The mass of each agent was also uniformly chosen in a random domain of [0.5, 1.5]. A steady configuration was formed
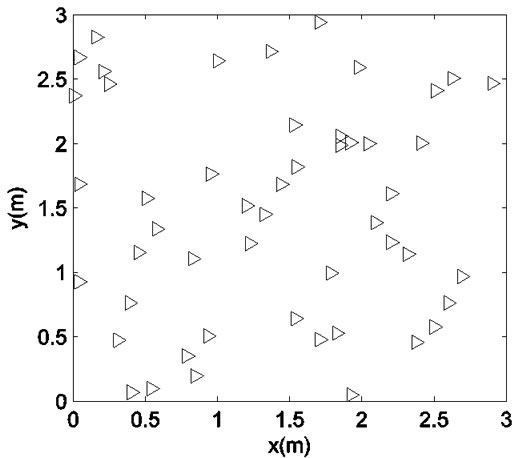
Figure 2. Initial positions of 50 agents.
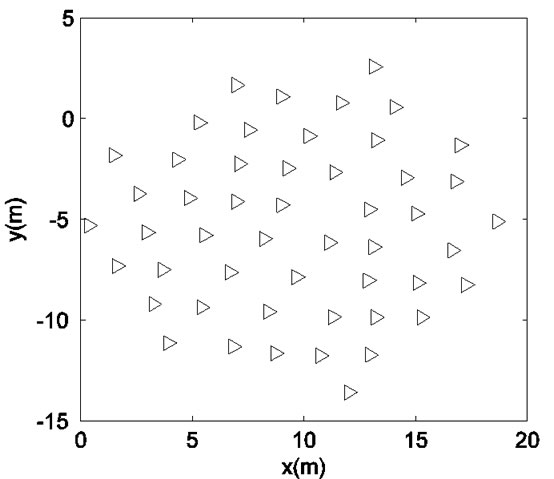
Figure 3. Configuration of 50 agents at t = 4.3495 (sec).
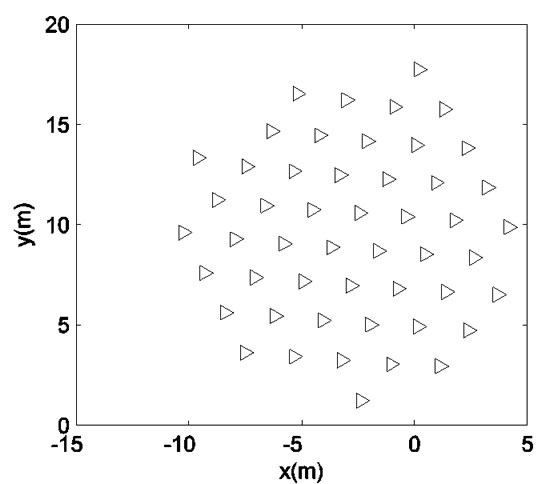
Figure 4. Final configuration of 50 agents at t = 20 (sec).
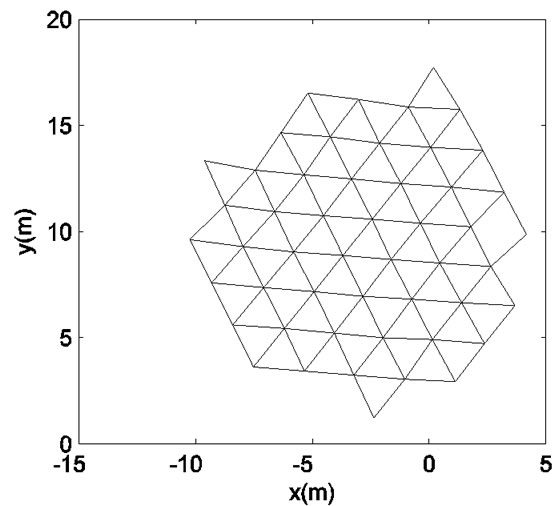
Figure 5. Position-dependent neighboring graph at t = 20 (sec).
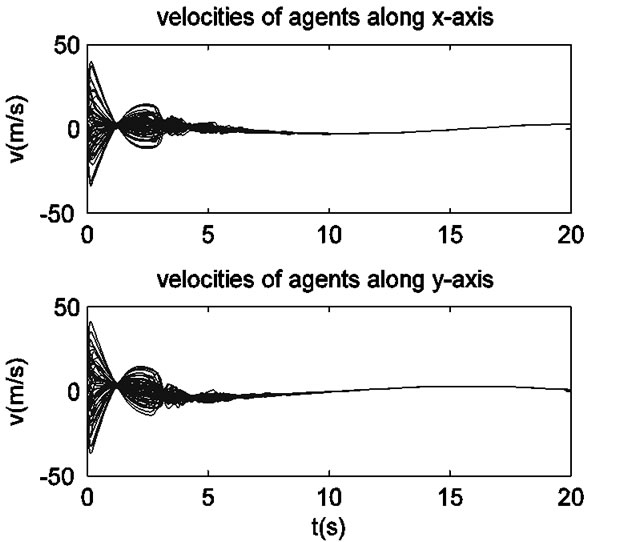
Figure 6. Velocities of 50 agents along x-axis and y-axis respectively.
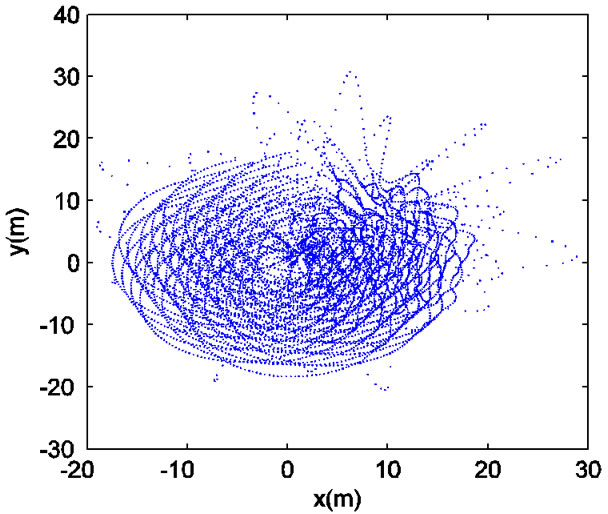
Figure 7. Trajectories of all agents within 20 (sec) time.
as shown in Figure 4 and maintained thereafter. A virtual agent


was used for this example. For highly disconnected neighboring graph  in initial state, Figure 5 shows the connected neighboring graph
in initial state, Figure 5 shows the connected neighboring graph  corresponding to the final configuration. Figure 6 shows velocity matching is achieved along x-axis and y-axis respectively. Figure 7 shows the trajectories of all agents within 20(sec) simulation time and the cohesive behaviors. The simulation demonstration with control law (21) was similar to that conducted by control laws (19), and therefore is not necessarily repeated here.
corresponding to the final configuration. Figure 6 shows velocity matching is achieved along x-axis and y-axis respectively. Figure 7 shows the trajectories of all agents within 20(sec) simulation time and the cohesive behaviors. The simulation demonstration with control law (21) was similar to that conducted by control laws (19), and therefore is not necessarily repeated here.
6. Conclusions
This paper establishes a theoretical framework for design and analysis of flocking control algorithms using a fuzzy-logic-based attractive/repulsive potential function for multiple agent networks with dynamical topology. Two cooperative control laws have been proposed for a group of autonomous agents to achieve flocking motion relative to different centers (mass center and geometric center). A virtual agent is introduced to represent a group objective for tracking purposes. Smooth Laplacian and smooth fuzzy-logic-based attractive/repulsive potential are proposed to overcome the difficulties in stability analysis. Simulation results validated the theoretical results.
7. Acknowledgements
This paper is supported in part by Hubei Provincial Natural Science Foundation under the grant 2008CDB316, Natural Science Research Project of Hubei Provincial Department of Education under the grant D20101201, and Scientific Innovation Team Project of Hubei Provincial College under the grant T200809.
8. References
[1] C. W. Reynolds, “Flocks, Herds, and Schools: A Distributed Behavioral Model,” Computer Graphics (ACM SIGGRAPH '87 Conference Proceedings), Vol. 21, No. 4, 1987, pp. 25-34.
[2] R. Olfati-Saber and R. M. Murray, “Consensus Problems in Networks of Agents with Switching Topology and Time-Delays,” IEEE Transactions on Automatic Control, Vol. 49, No. 9, September 2004, pp. 101-115.
[3] A. Jadbabaie, J. Lin and S. A. Morse, “Coordination of Groups of Mobile Agents Using Nearest Neighbor Rules,” IEEE Transactions on Automatic Control, Vol. 48, No. 6, June 2003, pp. 988-1001.
[4] W. Ren and R. Beard, “Consensus Seeking in MultiAgent Systems Using Dynamically Changing Interaction Topologies,” IEEE Transactions on Automatic Control, Vol. 50, No. 5, May 2005, pp. 655-661.
[5] L. Moreau, “Stability of Multiagent Systems with Time-Dependent Communication Links,” IEEE Transactions On Automatic Control, Vol. 50, No. 2, February 2005, pp. 169-182.
[6] Y. Liu, K. M. Passino and M. M. Polycarpou, “Stability analysis of M-dimensional Asynchronous Swarms with a Fixed Communication Topology,” IEEE Transactions on Automatic Control, Vol. 48, No. 1, Juanary 2003, pp.76- 95.
[7] Y. Liu, K. M. Passino and M. M. Polycarpou, “Stability Analysis of One-Dimensional Asynchronous Swarms,” IEEE Transactions on Automatic Control, Vol. 48, No. 10, October 2003, pp. 1848-1854.
[8] V. Gazi and K. M. Passino, “Stability Analysis of Swarms,” IEEE Transactions on Automatic Control, Vol. 48, No. 4, April 2003, pp. 692-697.
[9] H. G. Tanner, A. Jadbabaie and G. J. Pappas, “Stable Flocking of Mobile Agents, Part I: Fixed Topology,” The 42nd IEEE Conference on Decision and Control, Maui, December 2003, pp. 2010-2015.
[10] H. G. Tanner, A. Jadbabaie and G. J. Pappas, “Stable Flocking of Mobile Agents, Part II: Dynamic Topology,” The 42nd IEEE Conference on Decision and Control, Maui, December 2003, pp. 2016-2021.
[11] R. Olfati-Saber, “Flocking for Multi-Agent Dynamic Systems: Algorithms and Theory,” IEEE Transactions on Automatic Control, Vol. 51, No. 3, March 2006, pp. 401-420.
[12] D. Gu and H. Hu, “Using Fuzzy Logic to Design Separation Function in Flocking Algorithms,” IEEE Transactions on Fuzzy Systems, Vol. 16, No. 4, August 2008, pp. 826-838.
[13] C. Godsil and G. Royle, “Algebraic Graph Theory,” Springer, New York, 2001.