Wireless Sensor Network
Vol.5 No.10(2013), Article ID:37986,13 pages DOI:10.4236/wsn.2013.510021
On Energy-Efficient Time Synchronization for Wireless Sensors under Large-Scale and Small-Scale Fading Effects
1Embedded Systems Laboratory, Faculty of Engineering, University of Buenos Aires, Buenos Aires, Argentina
2CONICET, National Scientific and Technical Research Council, Buenos Aires, Argentina
3LPSC, Faculty of Engineering, University of Buenos Aires, Buenos Aires, Argentina
4Signals and Systems for Computing Group, Faculty of Engineering, Catholic University, Porto Alegre, Brazil
Email: pbriff@fi.uba.ar, lse@fi.uba.ar, lrey@fi.uba.ar, vargas@pucrs.br
Copyright © 2013 Pablo Briff et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received July 27, 2013; revised August 27, 2013; accepted September 4, 2013
Keywords: Wireless Sensor Networks; Clock Offset Estimation; Time Synchronization; Wireless Channel Fading
ABSTRACT
In this work, the existing trade-off between time synchronization quality and energy is studied for both large-scale and small-scale fading wireless channels. We analyze the clock offset estimation problem using one-way, two-way and N-way message exchange mechanisms affected by Gaussian and exponentially distributed impairments. Our main contribution is a general relationship between the total energy required for synchronizing a wireless sensor network and the clock offset estimation error by means of the transmit power, number of transmitted messages and average message delay, deriving the energy optimal lower bound as a function of the time synchronization quality and the number of hops in a multi-hop network.
1. Introduction
With the advent of wireless technologies over the last decade, Wireless Sensor Networks (WSN’s) are overtaking wired networks in the field of sensing [1]. A WSN typically consists of low cost sensor nodes that run on battery or obtain energy from harvesting techniques, namely self-powered sensors. For this reason, energy management becomes a substantial matter in order to guarantee reasonable sensors’ lifetime values. Networkwide time synchronization for WSN’s provides mechanisms for achieving power management and device location, while it constitutes an indispensable requirement for in-network processing of the sensed data. However, synchronizing an entire WSN represents a far-from-trivial enterprise that encompasses a suite of challenges to be solved, for which it remains within the top-five most challenging open topics in WSN’s [2]. Still, with the recent introduction of the “Internet of Things” (IoT), the density of the nodes in a WSN is expected to be considerably increased [3], and time synchronization will become a substantial need for achieving the desired performance figures. Due to the fact that in the most general case there will be no common clock signal broadcasted over the entire network, time synchronization algorithms aim to provide a mechanism by which all sensors obtain an estimate of their internal clocks with respect to the other nodes so as to reach a consensus on the concept of time among all the sensors in the network. For each sensor i, its internal clock ci can be modelled as a linear equation with a corresponding skew αi and offset βi [4,5], namely . In order to achieve a target synchronization quality, parameter estimation techniques can be applied, being the estimation error
. In order to achieve a target synchronization quality, parameter estimation techniques can be applied, being the estimation error ![]() a function of the estimator and the number of samples employed. Since time synchronization involves messages exchange and transmission/reception operation, it becomes an energy-consuming task for sensors to carry out; still, the communication channel may undergo impairments making transmitted messages do not reach their destinations, which constitutes a waste of energy for the entire network. Consequently, time synchronization implies an unavoidable energy expenditure; however, when achieved, it could allow significant further savings in energy consumption through proper network power management.
a function of the estimator and the number of samples employed. Since time synchronization involves messages exchange and transmission/reception operation, it becomes an energy-consuming task for sensors to carry out; still, the communication channel may undergo impairments making transmitted messages do not reach their destinations, which constitutes a waste of energy for the entire network. Consequently, time synchronization implies an unavoidable energy expenditure; however, when achieved, it could allow significant further savings in energy consumption through proper network power management.
This work is organized as follows: Section 2 provides an overview of the related work on the field of clock offset estimation, Sections 3 and 4 state the general system model for the power consumption vs. estimation quality trade-off when using one-way messages, Section 5 extends the limits found in Section 4 to two-way messages’ clock offset estimation, and a generalization of the problem to n-way messages is presented in Section 6; Section 7 shows that the results for two-way messages exchange are applicable to the renowned ReferenceBroadcast Synchronization algorithm [6], whereas Section 8 depicts the simulation results for the limits found in this research for the two-way message exchange scenario. Finally, Section 9 exposes the conclusions of this work.
2. Related Work
There is a number of clock synchronization techniques that base their operating principle on estimation theory and messages exchange among sensors. Examples of these are Reference-Broadcast Synchronization (RBS) [6], Timing-Sync Protocol for Sensor Networks (TPSN) [7] and Pairwise Broadcast Synchronization (PBS) [8]. All three protocols make use of the number of received messages from a given sensor node to produce their clock estimation. In RBS, a reference node broadcasts reference beacons that serve the nodes in the network to perform receiver-receiver pairwise synchronization. TPSN, however, creates a hierarchical structure in which each node synchronizes to its parent in a sender-receiver fashion. Yet, in PBS, a pair of supernodes A and P exchange messages that are overheard by all nodes in the network, allowing each node to construct their local estimate of the clock offset and skew with respect to the supernodes based on reception time stamps. Thus, for a given node B the quality of offset estimation with respect to reference node P can be obtained as follows [8]:
 (1)
(1)
It can be noted from (1) that the estimation quality, represented by the variance of the estimator, depends on the number of received messages  and the time stamps differences Di. Increasing
and the time stamps differences Di. Increasing  will enhance estimation quality in detriment of the energy consumed; this trade-off will be treated throughout this work in order to provide the basis for its theoretical limits. For simplicity reasons and without loss of generality, the problem of clock offset estimation will be studied in this work, although it can be generalized to skew estimation as well. More recent works such as [9,10] approach the energy efficiency problem from a protocol perspective, without detailing the physical phenomena involved in wireless channels. For example, [9] proposes a new algorithm, the Recursive Time Synchronization Protocol (RTSP), which aims to minimize the number of transmitted messages in a WSN, although the authors do not include in their analysis the transmit or receive power in each sensor node as part of the minimization problem. Thus, many authors expose this energy-synchronization quality balance as a known open topic (such as [11,12]), to the best of our knowledge, previous contributions in the field of clock synchronization focus on the algorithmic aspect of the timing mechanism with little concern on the energy, physical phenomena (i.e., fading channels) and average message delay required to attain such a goal. Moreover, the trade-off “transmit power—clock synchronization quality” is a critical issue for wireless embedded systems that requires to find an optimal solution. This paper extends the work we presented in [13] and provides a concrete answer to the following question: “What is the minimum energy required to synchronize a WSN within a target clock accuracy?”
will enhance estimation quality in detriment of the energy consumed; this trade-off will be treated throughout this work in order to provide the basis for its theoretical limits. For simplicity reasons and without loss of generality, the problem of clock offset estimation will be studied in this work, although it can be generalized to skew estimation as well. More recent works such as [9,10] approach the energy efficiency problem from a protocol perspective, without detailing the physical phenomena involved in wireless channels. For example, [9] proposes a new algorithm, the Recursive Time Synchronization Protocol (RTSP), which aims to minimize the number of transmitted messages in a WSN, although the authors do not include in their analysis the transmit or receive power in each sensor node as part of the minimization problem. Thus, many authors expose this energy-synchronization quality balance as a known open topic (such as [11,12]), to the best of our knowledge, previous contributions in the field of clock synchronization focus on the algorithmic aspect of the timing mechanism with little concern on the energy, physical phenomena (i.e., fading channels) and average message delay required to attain such a goal. Moreover, the trade-off “transmit power—clock synchronization quality” is a critical issue for wireless embedded systems that requires to find an optimal solution. This paper extends the work we presented in [13] and provides a concrete answer to the following question: “What is the minimum energy required to synchronize a WSN within a target clock accuracy?”
3. System Model
Transmit power and clock synchronization quality operate on different layers: the first one is a physical magnitude whereas the latter belongs to the application layer. Nonetheless, with the introduction of the cross layer design concept [1], all layers should be aligned in order to achieve an energy-optimal solution. However, prior to estimation, physical layer reception occurs with a given probability of failure as a function of the transmit power S, given by the outage probability Pout of the channel, defined as the probability that the received signal falls under a minimum acceptable threshold [14]. Some authors prefer to use the term packet reception rate (PRR), which generally refers to the ratio between the received and transmitted packets [15], although in this work it is more convenient to talk of outage probability, since it provides a closer look into the physical effects that lead to successfully receiving a packet or not.
Let’s consider each node’s clock offset θ is estimated with an unbiased estimator , and let
, and let  be the variance of the clock offset estimator. The problem described in this section centers on the fact that sender node A sends m packets while receiver node B receives
be the variance of the clock offset estimator. The problem described in this section centers on the fact that sender node A sends m packets while receiver node B receives  successful messages. The outage probability can also serve as a measure of the delay
successful messages. The outage probability can also serve as a measure of the delay ![]() introduced by the communication channel for achieving the synchronization quality, since the probability
introduced by the communication channel for achieving the synchronization quality, since the probability  of successfully receiving the target
of successfully receiving the target  messages when sending
messages when sending  messages is a binomial random variable (RV) with success probability
messages is a binomial random variable (RV) with success probability  and mean
and mean . This leads to an average delay per message δ defined by the rate of successfully received messages as follows:
. This leads to an average delay per message δ defined by the rate of successfully received messages as follows:
 (2)
(2)
where  is the message transmission time. Thus, reducing the outage probability will also enhance the synchronization time. That is, time-sensitive applications may adjust their performance by tuning the transmit power accordingly. However, this must be balanced with the application’s energy budget, since in order to reduce
is the message transmission time. Thus, reducing the outage probability will also enhance the synchronization time. That is, time-sensitive applications may adjust their performance by tuning the transmit power accordingly. However, this must be balanced with the application’s energy budget, since in order to reduce  , the transmit power S must be increased. Considering the estimation quality depends on the number of successfully received packets
, the transmit power S must be increased. Considering the estimation quality depends on the number of successfully received packets , the interesting relation
, the interesting relation  is sought. Thus, it is necessary to account for the estimation quality’s dependance on the number of received messages, namely
is sought. Thus, it is necessary to account for the estimation quality’s dependance on the number of received messages, namely  , and the number of received messages as a function of transmit power, i.e.
, and the number of received messages as a function of transmit power, i.e. .
.
In this work, we analyze two different perturbations of the estimated magnitude, i.e. Gaussian and exponential distributions corresponding to the impairments of the estimated clock offset θ. As explained in [16,17], a single-server M/M/1 queue can fittingly represent the cumulative link delay for point-to-point hypothetical reference connection, where the random delays are independently modeled as exponential RVs. The exponential random delays have their origins in the access time and processing times of the nodes. The reason for adopting Gaussian pdf is due to the central limit theorem, which asserts that the pdf of the sum of a large number of independent and identically distributed (iid) RVs approaches that of a Gaussian RV. This model will be appropriate if the delays are thought to be the addition of numerous independent random processes [17]. In addition to this, when nodes are estimating the magnitudes by means of the commonly used technique of Medium Access Control (MAC) layer time-stamping, the estimation noise is Gaussian distributed since the send time, access time and transmission time uncertainties are canceled out [7,18]. We also approach the synchronization problem from the local perspective of a node that is synchronizing with a neighbouring node, irrespective of the network size and topology. Still, we consider that the nodes’ spatial positions remain approximately constant during the synchronization process, as specified in Section 3.2. The analysis presented in this work is not tied to a particular procedure but it represents a universal lower bound on the “energy—synchronization quality” trade-off.
3.1. Estimators and Theoretical Limits
The trade-off studied in this work can be stated as an estimation problem. Both expected value and variance of the offset’s unbiased estimator are defined as shown below:
 (3)
(3)
 (4)
(4)
In order to formulate a general problem, the CramerRao lower bound [19] can be used for delimiting the best performance an estimator can afford. Thus, the estimation quality relates with the Fisher Information function  as follows:
as follows:
 (5)
(5)
with the Fisher Information’s expression as shown below [19]:
 (6)
(6)
where f is the likelihood function of the parameter θ.
3.2. Communication Channel Model
For wireless channels, received to transmitted power ratio  is dictated by [14]:
is dictated by [14]:
 (7)
(7)
where K is a constant that models the antenna gain, d0 a reference distance, γ the path loss exponent, d the distance between transmitter and receiver nodes, and , being ψ a RV that models either large-scale (shadowing) or small-scale (multipath fading) effects. A communication is defined to be successful, i.e. the receiver can process the transmitted message, when the received Signal-to-Noise Ratio (SNR) γs satisfies
, being ψ a RV that models either large-scale (shadowing) or small-scale (multipath fading) effects. A communication is defined to be successful, i.e. the receiver can process the transmitted message, when the received Signal-to-Noise Ratio (SNR) γs satisfies , being γ0 the minimum acceptable SNR by the receiver [14]. We will consider that the wireless channel is memoryless and time-invariant, meaning that each channel use will be independent and uncorrelated from each other, i.e., they will undergo independent and identically distributed (i.i.d.) fading effects [14]; this means that two subsequent messages sent over the wireless channel will present independent and uncorrelated impairments. Although this situation is not always present in practice, this assumption simplifies the mathematical problem while at the same time enables us to gain insight into the general problem. This condition may be applicable to fast-varying channels as well as moving sensors where the displacement distance
, being γ0 the minimum acceptable SNR by the receiver [14]. We will consider that the wireless channel is memoryless and time-invariant, meaning that each channel use will be independent and uncorrelated from each other, i.e., they will undergo independent and identically distributed (i.i.d.) fading effects [14]; this means that two subsequent messages sent over the wireless channel will present independent and uncorrelated impairments. Although this situation is not always present in practice, this assumption simplifies the mathematical problem while at the same time enables us to gain insight into the general problem. This condition may be applicable to fast-varying channels as well as moving sensors where the displacement distance  of a sensor is much less than the distance d that separates a pair of sensors. In a typical scenario where wireless sensors transmit over 2.4 GHz, with a wavelength of λ = 1.25 cm, it will be sufficient that
of a sensor is much less than the distance d that separates a pair of sensors. In a typical scenario where wireless sensors transmit over 2.4 GHz, with a wavelength of λ = 1.25 cm, it will be sufficient that  and
and  m.
m.
3.3. Multiple Broadcast Domains
Figure 1 depicts a situation where nodes deployed in a network contained in different broadcast domains need to

Figure 1. Network topology where multiple broadcast domains are present and multi-hop communication is required.
communicate to each other through an intermediate node. We will initially study the one-way message exchange situation, where Node 1 sends messages to Node 2, and the latter estimates Node 1’s clock offset without message exchange. Following to presenting a solution to this problem, we will study the two-way message exchange scenario, where Node 2 will respond messages to Node 1, and they will both estimate each other’s clock offsets. Finally, we will extend the results to the case in which Node 1 needs to communicate with Node 3 through Node 2, which will create a 4-way message exchange (Node 1-Node 2, Node 2-Node 3, and all the return messages to Node 1), a situation that can be generalized to N-way if there are N/2 broadcast domains and all sensors need to communicate with each other in the network. Therefore, with N-way message exchange we address the multiple hop communications in a multi-domain WSN.
3.4. Problem to Solve: Energy Optimization
The number of successfully received packets  is related to the transmit power S as shown below:
is related to the transmit power S as shown below:
 (8)
(8)
The main challenge is to find the transmit power S that satisfies the following condition:
 (9)
(9)
Equation (9) seeks the minimum transmit power S that guarantees the necessary amount of received messages  so that the clock offset estimation error
so that the clock offset estimation error  is less than a desired level
is less than a desired level![]() . For Cramer-Rao efficient estimators, i.e. estimators that attain equality in (5), the following inequality can be stated:
. For Cramer-Rao efficient estimators, i.e. estimators that attain equality in (5), the following inequality can be stated:
 (10)
(10)
where I is the Fisher Information of the estimated parameter θ as a function of the received samples . Thus, the problem can be stated as follows:
. Thus, the problem can be stated as follows:
 (11)
(11)
Equation (11) can be thought of as an expression of cross-layer design in wireless sensor networks, since it relates a physical layer magnitude (S) with an application layer parameter (![]() ). This expression seeks the minimum transmit power S for achieving a desired estimation error
). This expression seeks the minimum transmit power S for achieving a desired estimation error ![]() on the clock offset θ by successfully receiving
on the clock offset θ by successfully receiving  messages after transmitting m messages.
messages after transmitting m messages.
In order to account for energy optimization, both transmitter and receiver energy must be minimized; the first one depends on the transmit power S and the number of transmitted messages m, whereas the latter is determined by the total time the receiver circuit is powered-on. A priori, the time during which the receiver is turned on could be defined by ; however, this time equals the total transmit time, while the receiver node should be turned on for longer in order to receive all the messages since it cannot know in advance each message arrival time. Then, it is expected that the receiver assesses the channel properties and increases its receive time by a linear factor of
; however, this time equals the total transmit time, while the receiver node should be turned on for longer in order to receive all the messages since it cannot know in advance each message arrival time. Then, it is expected that the receiver assesses the channel properties and increases its receive time by a linear factor of . Thus, the total receive time becomes
. Thus, the total receive time becomes . That said, the total energy function for a pair of nodes (i, j), where node i is transmitting messages to node j, can be expressed as follows:
. That said, the total energy function for a pair of nodes (i, j), where node i is transmitting messages to node j, can be expressed as follows:
 (12)
(12)
where  as per (2) and
as per (2) and  represents the ratio between the receive power and the transmit power, which typically falls in the range
represents the ratio between the receive power and the transmit power, which typically falls in the range  for commercial transceivers [20]. Although the energy in (12) depends on
for commercial transceivers [20]. Although the energy in (12) depends on , this term has a smooth variation with S for which it does not strongly contribute to the overall variation as the rest of the unknowns S, m and
, this term has a smooth variation with S for which it does not strongly contribute to the overall variation as the rest of the unknowns S, m and ![]() do, which may present an unbounded variation as it will be shown in Section 6. Hence, it is sufficient to minimize the product of all S, m and
do, which may present an unbounded variation as it will be shown in Section 6. Hence, it is sufficient to minimize the product of all S, m and ![]() to find the minimum energy working point. Then, let:
to find the minimum energy working point. Then, let:
 (13)
(13)
be a measure of the energy employed in the synchronization process. Thus, the objective is to minimize the  function for both small-scale and large-scale fading effects. This will be the main motivation throughout the rest of this work.
function for both small-scale and large-scale fading effects. This will be the main motivation throughout the rest of this work.
3.5. Distribution Functions of the Clock Offset
3.5.1. Gaussian Distribution Function
As per (6), the Fisher Information function requires a likelihood function to be applied. Considering the case of Gaussian distributed likelihood functions, for  Gaussian i.i.d observations of θ, the joint probability distribution function is expressed as:
Gaussian i.i.d observations of θ, the joint probability distribution function is expressed as:
 (14)
(14)
where  is the variance of the perturbations that impair the measurements around the real value of the parameter θ to be estimated. Operating with (6), (11) and (14), we obtain:
is the variance of the perturbations that impair the measurements around the real value of the parameter θ to be estimated. Operating with (6), (11) and (14), we obtain:
 (15)
(15)
3.5.2. Exponential Distribution Function
In this section we study the case in which the offset θ will be estimated from  observations affected by exponential random delays. Let the one-way message estimator of the clock offset be:
observations affected by exponential random delays. Let the one-way message estimator of the clock offset be:
 (16)
(16)
where X is the delay of the channel with exponential pdf, and  is the expectation of X, thus θ is an unbiased estimator. The pdf of X can be expressed as:
is the expectation of X, thus θ is an unbiased estimator. The pdf of X can be expressed as:
 (17)
(17)
where  and
and  are the expectation and variance of the delay X, respectively. The joint pdf after
are the expectation and variance of the delay X, respectively. The joint pdf after  i.i.d received messages becomes:
i.i.d received messages becomes:
 (18)
(18)
By applying (6), the Fisher Information for exponential delays is defined by:
 (19)
(19)
For notational simplicity, we will symbolize the case of Gaussian delays with the parameter  and exponential delays with
and exponential delays with .
.
4. One-Way Message Clock Offset Estimation Quality as a Function of Transmit Power
4.1. Motivation
Clock estimation by means of unidirectional messages represents an energy-efficient situation for each receiver node, since it does not require to implement a message exchange mechanism, while it can minimize or turn-off its radio operation upon receiving the required number of messages. The Flooding Time Synchronization Protocol (FTSP) [21], makes use of this technique, where each node produces a linear regression estimation of the sender’s clock offset. For this work, the one-way message mechanism represents the starting point for exposing the underlying issues associated with clock synchronization by means of wireless messages.
4.2. Large-Scale Effects: Path Loss and Shadowing
Large-scale fading represents the average signal power attenuation or path loss over large areas, a phenomenon affected by prominent terrain contours (billboards, clump of buildings, etc.) between the transmitter and receiver [22]; still, for indoor applications, this phenomenon is also present for distances smaller than 10 meters [14]. Under path loss and shadowing, the outage probability Pout is defined as the probability that the received power falls below a given outage threshold SRx expressed in dBm as found below [14]:
 (20)
(20)
with the unknown transmit power S expressed in dBm. Parameters K, d, d0, γ, d defined in (7) are assumed known. In this scenario, the RV  assumes a Gaussian distribution with zero mean and variance
assumes a Gaussian distribution with zero mean and variance  (assumed known). Involving (8), (11), (20), (15) for Gaussian delays (
(assumed known). Involving (8), (11), (20), (15) for Gaussian delays ( ) and (19) for exponential delays (
) and (19) for exponential delays ( ), it can be seen that for a desired estimation precision
), it can be seen that for a desired estimation precision![]() , the transmit power S must fulfill the following:
, the transmit power S must fulfill the following:
 (21)
(21)
Equation (21) shows that for decreasing estimation error![]() , either power S or number of transmitted messages m must be increased accordingly. Being the Q(z) function bounded by the interval (0, 1), condition in (21)
, either power S or number of transmitted messages m must be increased accordingly. Being the Q(z) function bounded by the interval (0, 1), condition in (21)
can be met if and only if . The range of this expression is dominated by m for a given estimation error
. The range of this expression is dominated by m for a given estimation error![]() . Since Q increases with increasing S, the minimum transmit power Smin will be found on the limit of equality in (21). It is then convenient to rewrite this equation into a function as follows:
. Since Q increases with increasing S, the minimum transmit power Smin will be found on the limit of equality in (21). It is then convenient to rewrite this equation into a function as follows:
 (22)
(22)
with . From (22), the number of transmitted messages m is determined by:
. From (22), the number of transmitted messages m is determined by:
 (23)
(23)
After combining (2) and (20), the delay ![]() adopts the following expression under large-scale effects:
adopts the following expression under large-scale effects:
 (24)
(24)
By substituting (23) and (24) into (13), and expressing Smin in dBm, the minimization problem is stated as:
 (25)
(25)
Defining , we can rewrite (25) as follows:
, we can rewrite (25) as follows:
 (26)
(26)
Considering , and replacing back
, and replacing back , (25) solves to the following condition for both optimized transmit power and transmitted messages:
, (25) solves to the following condition for both optimized transmit power and transmitted messages:
 (27)
(27)
which can be graphically solved to find the optimal Smin value, provided that . Equations (23) and (27) represent an energy-efficient solution to the target estimation error
. Equations (23) and (27) represent an energy-efficient solution to the target estimation error ![]() under the effect of large-scale fading.
under the effect of large-scale fading.
4.3. Small-Scale Effects: Multipath Fading
Small scale fading refers to the dramatic changes in signal amplitude and phase as a result of small changes in spatial separation between transmitted and receiver [22], a situation that occurs when the transmitter and receiver nodes are surrounded by a large number of scattering objects [14]. Under small scale fading, or Rayleigh fading, there is no line-of-sight signal component and the envelope of the received signal is described by a Rayleigh probability density function (pdf). The outage probability under Rayleigh fading for a minimum acceptable SNR  and average transmitted SNR
and average transmitted SNR  becomes [14]:
becomes [14]:
 (28)
(28)
where  and
and  are dimensionless whereas the transmit power S and the noise power
are dimensionless whereas the transmit power S and the noise power  are expressed in Watt. Consequently, by combining (15) with (8) and (28), the relation between transmit power S, number of transmitted messages m and estimation precision
are expressed in Watt. Consequently, by combining (15) with (8) and (28), the relation between transmit power S, number of transmitted messages m and estimation precision ![]() for small-scale effects is described by the following expression:
for small-scale effects is described by the following expression:
 (29)
(29)
As per (29), the number of transmitted messages m is determined by:
 (30)
(30)
The delay ![]() under small-scale effects can be expressed as:
under small-scale effects can be expressed as:
 (31)
(31)
By substituting (30) and (31) into (13), the minimization problem becomes:
 (32)
(32)
where Smin is expressed in Watt. Equation (32) solves to:
 (33)
(33)
Consequently, as per (30), the expression of the minimum number of transmitted messages m results in:
 (34)
(34)
Equation (34) shows an inversely proportional dependance on m with estimation quality![]() , which exhibits the existing trade-off between estimation quality and number of transmitted messages, and their relation to energy consumption as determined by (13).
, which exhibits the existing trade-off between estimation quality and number of transmitted messages, and their relation to energy consumption as determined by (13).
5. Two-Way Message Clock Offset Estimation Quality as a Function of Transmit Power
5.1. Motivation
So far, we have studied the problem of one-way message estimation. In this section, we extend our work presented in [13] to the most commonly used technique for estimating the clock offset (and clock skew as well) in the time synchronization problem in WSN’s, i.e., two-way message exchange mechanism; a complete description of this technique can be found in [17] and an application of minimum variance unbiased estimation (MVUE) of the clock offset for the two-way message exchange mechanism is detailed in [23].
5.2. General Provisions
We will consider that all nodes are constructively identical, meaning that their minimum acceptable SNR  will be equal for all of them, and they will transmit signals over a symmetric channel in an environment with equal noise power
will be equal for all of them, and they will transmit signals over a symmetric channel in an environment with equal noise power  and
and  for both small-scale and large-scale effects, respectively. In addition to this, we will consider that signals transmitted in uplink or downlink transmission will undergo the same stochastic process for the noise impairments, with equal mean, variance and distribution. In summary:
for both small-scale and large-scale effects, respectively. In addition to this, we will consider that signals transmitted in uplink or downlink transmission will undergo the same stochastic process for the noise impairments, with equal mean, variance and distribution. In summary:
 (35)
(35)
5.3. Model Statement
Let’s consider the situation where two nodes i and j produce local estimates of the clock offset based on the number of observations (messages) exchanged amongst them, as it is the case of TPSN or RBS. Although these two synchronization protocols differ in nature, they both exploit two-way messages exchange in order to achieve synchronization. Under a two-way message scenario, each node i will compute a valid sample if and only if 1) it succeeds to deliver a message to node j and, 2) it receives the associated response to this message; this means that both transmitted and received (i.e., replied) messages must be successfully delivered to the destination. To be more specific, let’s consider node i sends a message  to node j at time k. Node i will wait for the reply message
to node j at time k. Node i will wait for the reply message  from node j associated to time slot k for computing its k-th estimation sample. This property of the nature of two-way message exchange mechanism that makes two independent messages be chained together to produce a valid estimation sample will be further exploited in the next sections.
from node j associated to time slot k for computing its k-th estimation sample. This property of the nature of two-way message exchange mechanism that makes two independent messages be chained together to produce a valid estimation sample will be further exploited in the next sections.
5.4. Problem Outline
Recalling Section 3.4, we now need to find its counterpart for two-way message exchange. Since each individual node i will process the k-th estimation sample based on the message it sent to node j and its associated response, we can state the probability that node i receives a valid sample from its neighbour node j at time k as:
 (36)
(36)
where  indicates that node j has successfully received a message sent from node i, at time k. Since the messages sent by the nodes are independent from the other’s messages, and each channel use is also an i.i.d. RV, (36) can be rewritten as:
indicates that node j has successfully received a message sent from node i, at time k. Since the messages sent by the nodes are independent from the other’s messages, and each channel use is also an i.i.d. RV, (36) can be rewritten as:
 (37)
(37)
Since we assumed identical nodes immersed in a symmetric, time-invariant wireless channel, we can rewrite (37) as follows:
 (38)
(38)
where  is the round-trip success probability for the round-trip message k between nodes i and j and
is the round-trip success probability for the round-trip message k between nodes i and j and  is the traditional outage probability defined in Section 4. Equation (38) indicates that, for a given node, the probability of receiving a valid round-trip estimation sample k depends on the square of the outage probability of the wireless channel. Moreover, the large-scale and smallscale effects studied in Sections 4.2 and 4.3 will be have to be reapplied with this new channel success factor. The counterpart of (8) under a two-way message scenario becomes:
is the traditional outage probability defined in Section 4. Equation (38) indicates that, for a given node, the probability of receiving a valid round-trip estimation sample k depends on the square of the outage probability of the wireless channel. Moreover, the large-scale and smallscale effects studied in Sections 4.2 and 4.3 will be have to be reapplied with this new channel success factor. The counterpart of (8) under a two-way message scenario becomes:
 (39)
(39)
where  for each (i, j) pair and for all k.
for each (i, j) pair and for all k.
5.5. Large-Scale Effects
By combining (20) with (38), the round-trip success probability ![]() equals
equals . Hence, this leads the problem under large-scale effects to the following solution:
. Hence, this leads the problem under large-scale effects to the following solution:
 (40)
(40)
with . For the minimum transmit power found in (40), the corresponding minimum number of transmitted messages is given by:
. For the minimum transmit power found in (40), the corresponding minimum number of transmitted messages is given by:
 (41)
(41)
Yet, the delay under this scenario is expected to be twice as much the one-way message exchange delay:
 (42)
(42)
5.6. Small-Scale Effects
With the introduction of![]() , (32) will have its exponent increased by a factor of 4, which can be thought of as increasing the noise power
, (32) will have its exponent increased by a factor of 4, which can be thought of as increasing the noise power . Thus, obtaining the tuple (
. Thus, obtaining the tuple ( ) is straightforward:
) is straightforward:
 (43)
(43)
This shows that the effect of small-scale effects for the round-trip message scenario can be linearized to the number of round-trips required for obtaining a single valid message k. It is interesting to note that the minimum number of messages mmin remains unchanged with respect to the one-way scenario for equal![]() , while the adjusting variable remains the transmit power S.
, while the adjusting variable remains the transmit power S.
6. N-way Message Clock Offset Estimation Quality as a Function of Transmit Power
A generalization of the problem can be easily inferred for both fading scenarios. Let a single estimation sample be composed of n messages exchanged between nodes i and j over a symmetrical stationary channel. A value of n = 1 represents one-way messages, n = 2 corresponds to two-way messages, and so on. A situation in which a single node produces a single estimate sample based on n hops will represent a n-way message exchange mechanism. Then the following generalization can be stated for each channel fading situation.
6.1. Large-Scale Effects
 (44)
(44)
6.2. Small-Scale Effects
 (45)
(45)
Equation (44) shows that for increasing n, both mmim and  grow unbounded since
grow unbounded since  as
as . Thus, Smin needs to be increased in order to keep
. Thus, Smin needs to be increased in order to keep , so that mmim and
, so that mmim and  do not experiment an abrupt growth as n is raised. For small-scale fading effects, as shown in (45), Smin increases linearly with n for achieving the target estimation error
do not experiment an abrupt growth as n is raised. For small-scale fading effects, as shown in (45), Smin increases linearly with n for achieving the target estimation error![]() ; also, the average message delay
; also, the average message delay  increases unbounded with n, which represents no benefit from the energetic or application standpoint. Finally, the minimum number of messages mmim mainly depends on and inversely proportional to
increases unbounded with n, which represents no benefit from the energetic or application standpoint. Finally, the minimum number of messages mmim mainly depends on and inversely proportional to![]() .
.
7. Application Example: RBS Algorithm
In this section, the Reference-Broadcast Synchronization (RBS) [6] protocol will be used as an example to apply the aforementioned theoretical limits. In RBS, a pair of receiver nodes synchronize by estimating each other’s relative offsets after receiving a common reference signal which is assumed to arrive simultaneously to all nodes within the same broadcast domain. This approach, called receiver-receiver synchronization, removes the largest nondeterministic part of the receive delay due to the broadcast characteristic of the wireless channel. Thus, each pair of neighbouring nodes (i, j) will exchange their observations of the reference broadcast message and will estimate each other’s relative clock offset  with the following estimator:
with the following estimator:
 (46)
(46)
Considering that  and
and , where
, where  and
and  represent AWGN noise with equal mean and variance, while
represent AWGN noise with equal mean and variance, while  is the absolute time at sample k, we can rewrite (46) as follows:
is the absolute time at sample k, we can rewrite (46) as follows:
 (47)
(47)
where  is a Gaussian RV with distribution
is a Gaussian RV with distribution .
.
Lemma 1: As per (47), RBS estimates the offset between nodes i and j through the sample mean, which is the Minimum Variance Unbiased Estimator (MVUE) estimator of , attaining the Cramer-Rao Lower Bound (CRLB) exposed in (10). Then, the general lower bounds shown in Section 3.4 are seamlessly applicable to the RBS protocol.
, attaining the Cramer-Rao Lower Bound (CRLB) exposed in (10). Then, the general lower bounds shown in Section 3.4 are seamlessly applicable to the RBS protocol.
Proof: an unbiased estimator of the parameter  based on measurements x that attains the CRLB can be found if and only if [19]:
based on measurements x that attains the CRLB can be found if and only if [19]:
 (48)
(48)
for some functions  and
and . Still, if
. Still, if  and
and  exist, the CRLB equals
exist, the CRLB equals  and
and  is the MVUE estimator of
is the MVUE estimator of . Defining
. Defining , and involving the likelihood function defined in (14), (48) takes the following expression:
, and involving the likelihood function defined in (14), (48) takes the following expression:
 (49)
(49)
Equation (49) shows that the CRLB is defined by
 while
while
 is the MVUE estimator of
is the MVUE estimator of . Thus, by introducing (47), the MVUE estimator of
. Thus, by introducing (47), the MVUE estimator of  is the sample mean. Hence, Lemma 1 is proved.
is the sample mean. Hence, Lemma 1 is proved.
8. Simulation Results
This section exposes the simulations results for typical WSN parameters as referenced in [14] under the most commonly used exchange mechanism, i.e. two-way message exchange (n = 2). Figure 2 and 3 depict the dependance of the number of transmitted messages m and the required energy  with transmit power S under the influence of large-scale fading, for Gaussian and exponential delays, respectively, and for different values of the estimation quality
with transmit power S under the influence of large-scale fading, for Gaussian and exponential delays, respectively, and for different values of the estimation quality![]() . The counterpart for smallscale or Rayleigh fading is shown in Figure 4 and 5, for Gaussian and exponential delays, respectively. Results show that it is necessary to finely adjust S to obtain a minimum m so as to minimize the overall synchronization energy.
. The counterpart for smallscale or Rayleigh fading is shown in Figure 4 and 5, for Gaussian and exponential delays, respectively. Results show that it is necessary to finely adjust S to obtain a minimum m so as to minimize the overall synchronization energy.
As the number of hops n increases, the energy minima move towards higher values of S for both fading scenar-

Figure 2. Number of transmitted messages and Energy required as a function of transmit power for large-scale fading, for different clock offset estimation qualities using two-way messages, with Gaussian delays.
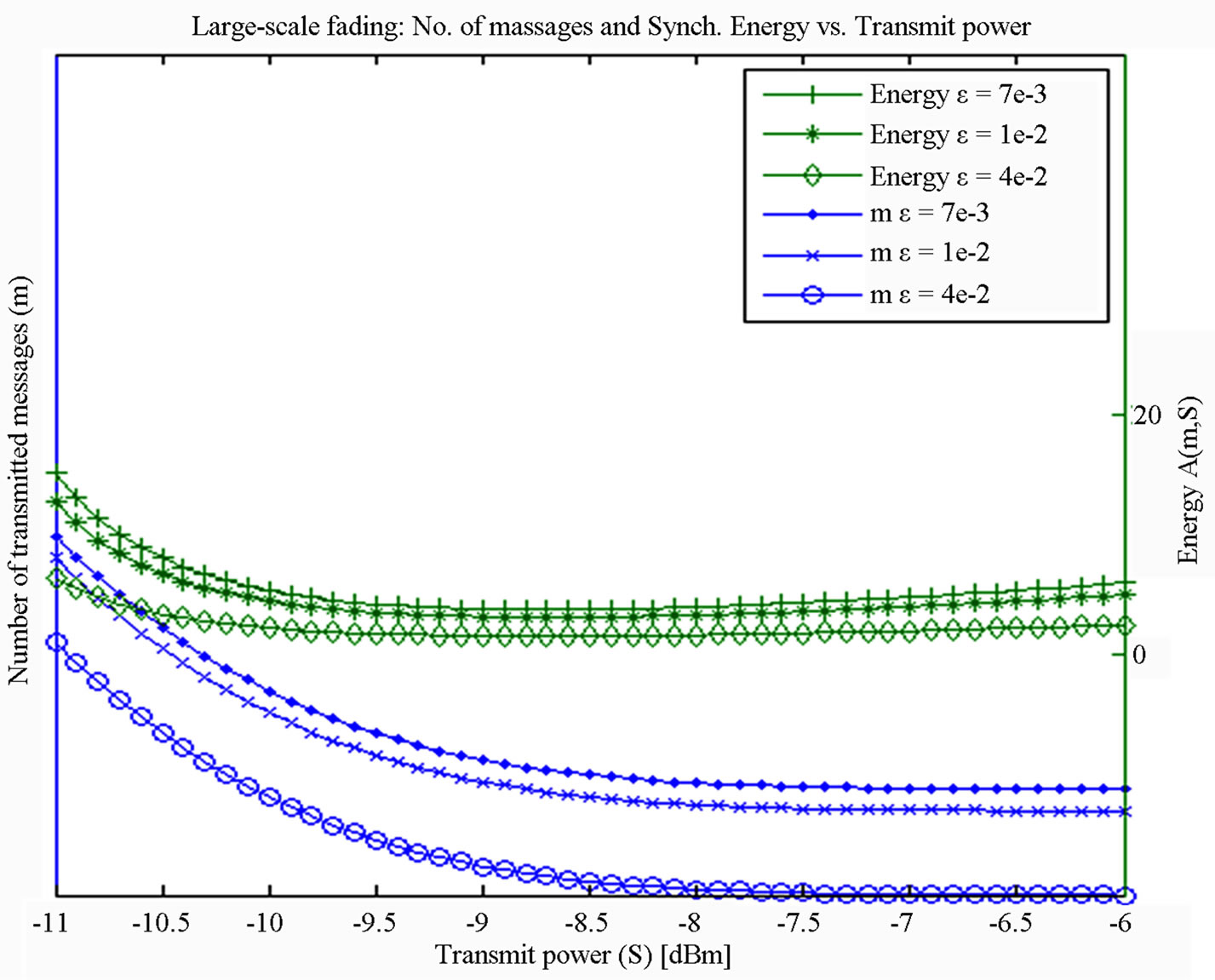
Figure 3. Number of transmitted messages and energy required as a function of transmit power for large-scale fading, for different clock offset estimation qualities using two-way messages, with exponential delays.
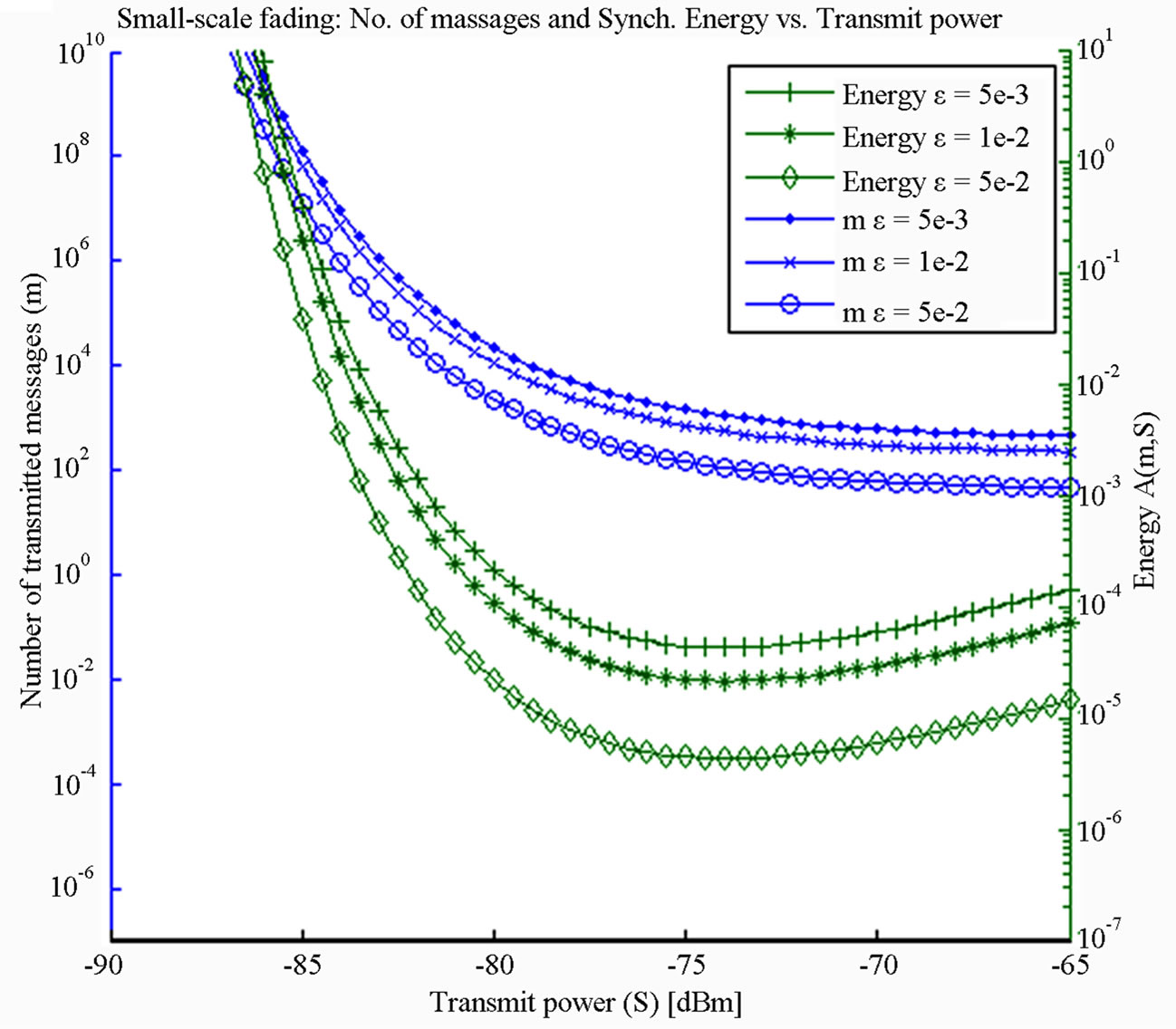
Figure 4. Number of transmitted messages and energy required as a function of transmit power for small-scale fading, for different clock offset estimation qualities using two-way messages, with Gaussian delays.
ios; this means that dense multi-hop sensor networks (large n) will require more synchronization energy. Examples of these types of networks can be found in [24], applied to farming and geographic surveillance. Figure 6
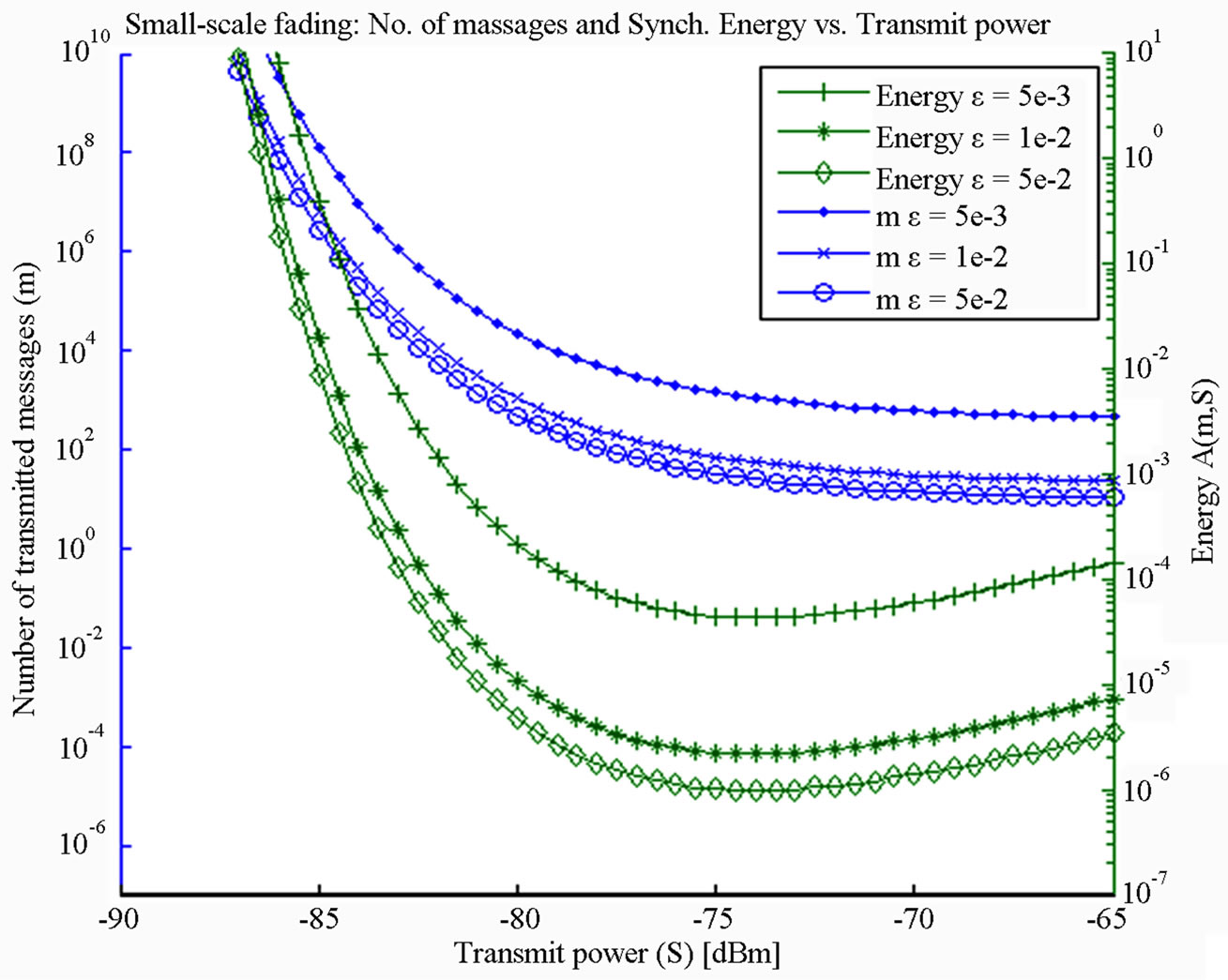
Figure 5. Number of transmitted messages and energy required as a function of transmit power for small-scale fading, for different clock offset estimation qualities using two-way messages, with exponential delays.
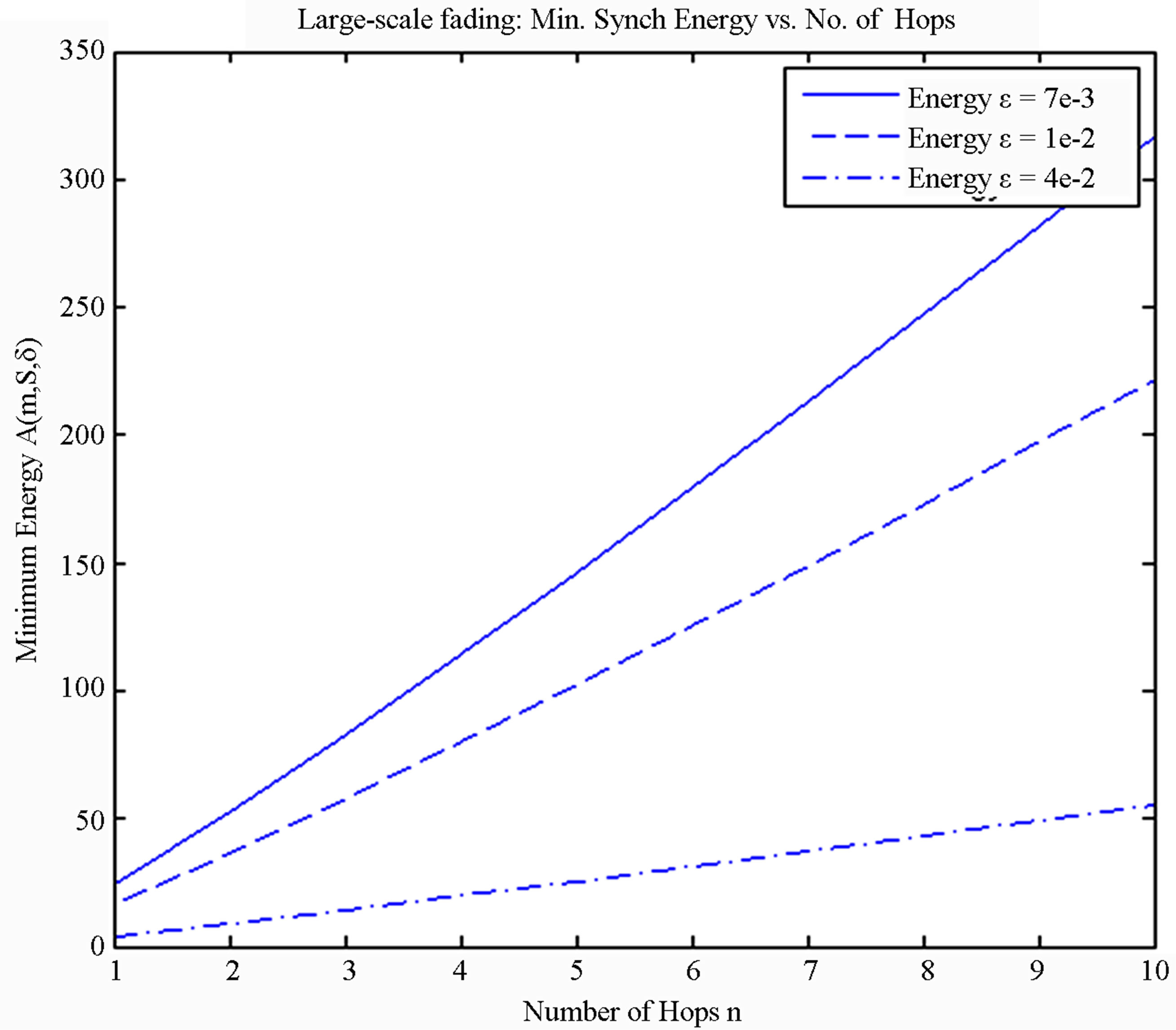
Figure 6. Minimum synchronization energy as a function of number of hops for large-scale fading, for different clock offset estimation qualities, with Gaussian delays.
shows the energy minima for large-scale fading and Gaussian noise, where it can be seen that the growth of  is fairly smooth due to the fact that Smin tends to maximize the Q-function for maintaining mmin and
is fairly smooth due to the fact that Smin tends to maximize the Q-function for maintaining mmin and  as minimum as possible. The counterpart for small-scale fading and Gaussian noise is displayed in Figure 7, where the best-effort situation exhibits a linear growth of the energy function with the number of hops;
as minimum as possible. The counterpart for small-scale fading and Gaussian noise is displayed in Figure 7, where the best-effort situation exhibits a linear growth of the energy function with the number of hops;
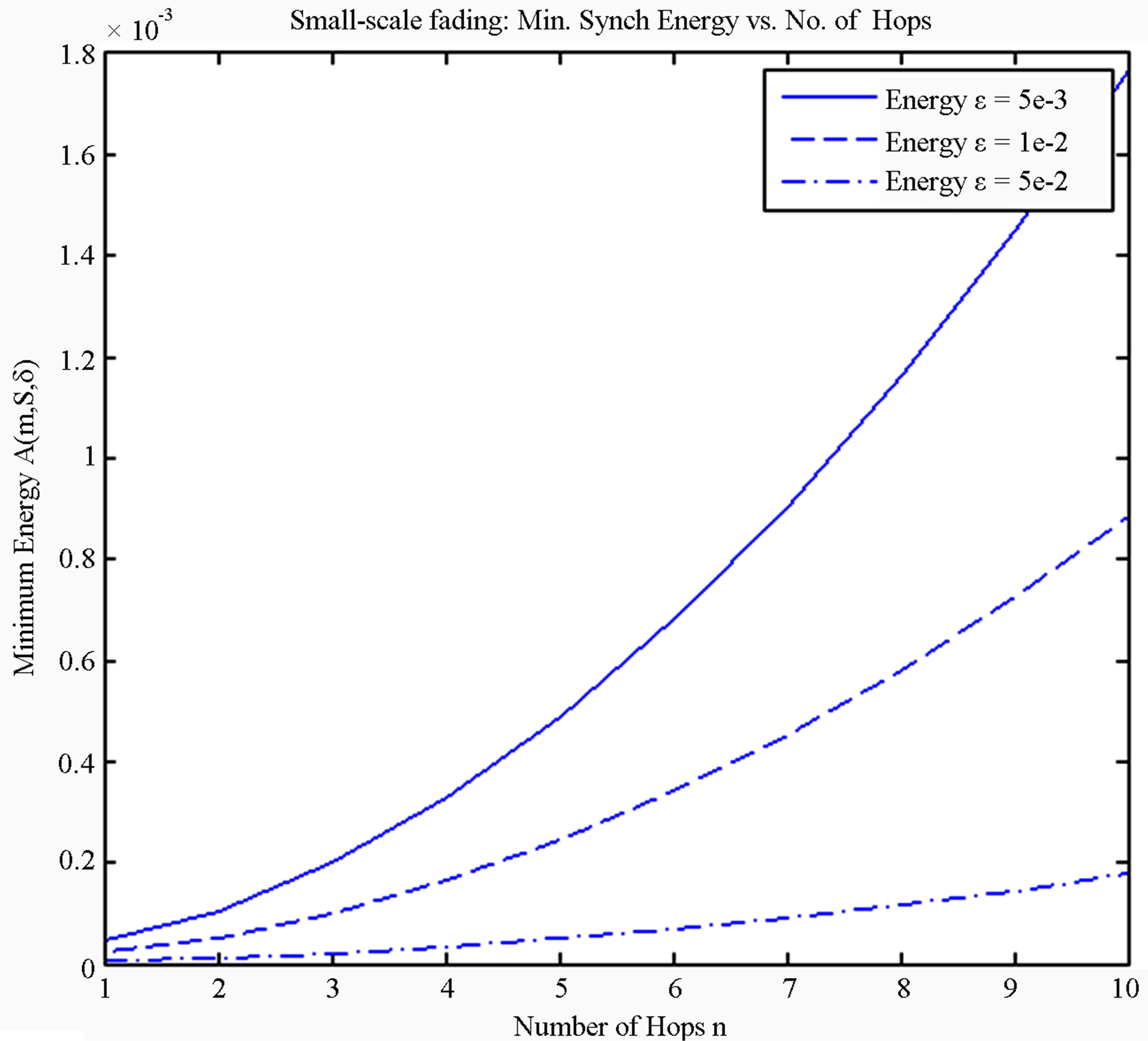
Figure 7. Minimum synchronization energy as a function of number of hops for small-scale fading, for different clock offset estimation qualities, with Gaussian delays.
for values of the transmit power smaller than the minimum-energy power Smin, an exponential growth of  is expected for increasing n, as dictated by (45).
is expected for increasing n, as dictated by (45).
9. Summary and Discussions
Time synchronization for a WSN can be achieved by means of parameter estimation techniques which require a number of messages to be transmitted from a sender to a receiver node. The minimum amount of total energy required for achieving a desired estimation quality ![]() is represented by the product of the transmit power S, number of messages m and the average message delay
is represented by the product of the transmit power S, number of messages m and the average message delay![]() . By introducing the concept of outage probability of the wireless channel for both large-scale and small-scale fading scenarios, a minimization problem can be stated for the total energy function. The resolution of the entire system finds the energy-optimal working point which represents a lower bound for the estimation quality.
. By introducing the concept of outage probability of the wireless channel for both large-scale and small-scale fading scenarios, a minimization problem can be stated for the total energy function. The resolution of the entire system finds the energy-optimal working point which represents a lower bound for the estimation quality.
The general results obtained in this work have been applied to the cases of Gaussian and exponential perturbations for the Cramer-Rao efficient, unbiased offset estimator . For other estimators that do not fulfill these conditions, the estimation error
. For other estimators that do not fulfill these conditions, the estimation error  shall be used instead of the Fisher Information function in order to compute the theoretical limits for that particular case. The renowned one-way and two-way message exchange scenarios have been extensively analyzed in this work, proving that the RBS synchronization algorithm achieves one-way message exchange theoretical limits. Finally, the results obtained throughout this work have been extended for the case of n-way messages, which will serve as a basis to generalize the synchronization energy problem to densely deployed multi-hop wireless sensor networks, as it will be in the realm of the Internet of Things. As part of our future work, we will extend this analysis to a generic WSN aiming to find the network-wide energy vs. estimation quality trade-off, including the effect of interference from simultaneous transmitters in the analysis. We are also considering incorporating in our analysis the development of energy harvesting techniques in an attempt to render the synchronization process as autonomous as possible from energy provided from external environment.
shall be used instead of the Fisher Information function in order to compute the theoretical limits for that particular case. The renowned one-way and two-way message exchange scenarios have been extensively analyzed in this work, proving that the RBS synchronization algorithm achieves one-way message exchange theoretical limits. Finally, the results obtained throughout this work have been extended for the case of n-way messages, which will serve as a basis to generalize the synchronization energy problem to densely deployed multi-hop wireless sensor networks, as it will be in the realm of the Internet of Things. As part of our future work, we will extend this analysis to a generic WSN aiming to find the network-wide energy vs. estimation quality trade-off, including the effect of interference from simultaneous transmitters in the analysis. We are also considering incorporating in our analysis the development of energy harvesting techniques in an attempt to render the synchronization process as autonomous as possible from energy provided from external environment.
REFERENCES
- A. Swami, Q. Zhao, Y. Hong and L. Tong, “Wireless Sensor Networks, Signal Processing and Communications Perspectives,” Wiley, Hoboken, 2007, pp. 9-89.
- T. Locher, P. Von Rickenbach and R. Wattenhofer, “Sensor Networks Continue to Puzzle: Selected Open Problems,” Proceedings of the Ninth International Conference on Distributed Computing and Networking, 2008. http://dx.doi.org/10.1007/978-3-540-77444-0_3
- Postscapes, “Tracking the Internet of Things,” 2012. www.postscapes.com
- F. Ren, C. Lin and F. Liu, “Self-Correcting Time Synchronization Using Reference Broadcast in Wireless Sensor Network,” IEEE Wireless Communications, 2008.
- L. Schenato and G. Gamba, “A Distributed Consensus Protocol for Clock Synchronization in Wireless Sensor Network,” Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, 12-14 December 2007, pp. 2289-2294.
- J. Elson, L. Girod and D. Estrin, “Fine-Grained Network Time Synchronization Using Reference Broadcasts,” Proceedings of the 5th Symposium on Operating Systems Design and Implementation, Boston, Vol. 36, No. SI, 2002, pp. 147-163.
- S. Ganeriwal, R. Kumar and M. Srivastava, “Timing- Sync Protocol for Sensor Networks,” SenSys ’03, ProCeedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, 2003, pp. 138-149.
- K. Noh, E. Serpedin and K. Qaraqe, “A New Approach for Time Synchronization in Wireless Sensor Networks: Pairwise Broadcast Synchronization,” IEEE Transactions on Wireless Communications, Vol. 7, No. 9, 2008.
- M. Akhlaq and T. R. Sheltami, “Rtsp: An Accurate and Energy-Efficient Protocol for Clock Synchronization in WSNs,” IEEE Transactions on Instrumentation and Measurement, Vol. 62, No. 3, 2013, pp. 578-589.
- F. Ferrari, M. Zimmerling, L. Thiele and O. Saukh, “Efficient Network Flooding and Time Synchronization with Glossy,” IEEE 10th International Conference on Information Processing in Sensor Networks (IPSN), Chicago, 12-14 April 2011, pp. 73-84.
- E. Serpedin and Q. Chaudhari, “Synchronization in Wireless Sensor Networks: Parameter Estimation, Performance Benchmarks, and Protocols,” Cambridge University Press, Cambridge, 2009. http://dx.doi.org/10.1017/CBO9780511627194
- Q. Chaudhari, E. Serpedin and K. Qaraqe, “Cramer-Rao Lower Bound for the Clock Offset of Silent Nodes Synchronizing through a General Sender Receiver Protocol in Wireless Sensor Nets,” 16th European Signal Processing Conference (EUSIPCO), Lausanne, 2008.
- P. Briff, F. Vargas, A. Lutenberg and L. Rey Vega, “On the Trade-Off of Power Consumption and Time Synchronization Quality in Wireless Sensor Networks,” Proceedings of the 11th IEEE Conference on Sensors, Taipei, 28-31 October 2012, pp. 1927-1930.
- A. Goldsmith, “Wireless Communications,” Cambridge University Press, Cambridge, 2005. http://dx.doi.org/10.1017/CBO9780511841224
- N. Pustchi and T. Korkmaz, “Improving Packet Reception Rate for Mobile Sinks in Wireless Sensor Networks,” 2012 IEEE International Symposium on World of Wireless, Mobile and Multimedia Networks (WoWMoM), San Francisco, 25-28 June 2012, pp. 1-9.
- D. R. Jeske, “On Maximum-Likelihood Estimation of Clock Offset,” IEEE Transactions on Communications, Vol. 53, No. 1, 2005, pp. 53-54. http://dx.doi.org/10.1109/TCOMM.2004.840668
- K. Noh, Q. Chaudhari, E. Serpedin and B. Sutter, “Novel Clock Phase Offset and Skew Estimation Using TwoWay Timing Message Exchanges for Wireless Sensor Networks,” IEEE Transactions on Communications, Vol. 55, No. 4, 2007, pp. 766-777. http://dx.doi.org/10.1109/TCOMM.2007.894102
- S. Song, L. He, Y. Jiang, C. Hu and Y. Cao, “Wireless Sensor Network Time Synchronization Algorithm Based on sfd,” Advances in Wireless Sensor Networks, 2013, pp. 393-400.
- S. Kay, “Fundamentals of Statistical Signal Processing: Volume 1,” Prentice Hall, Upper Saddle River, 1993, pp. 27-77.
- Texas Instruments Inc., “Cc2520 Data Sheet 2.4 ghz IEEE 802.15.4/Zigbee rf Transceiver,” Texas Instruments Inc., 2007.
- M. Maroti, B. Kusy, G. Simon and A. Ledeczi, “The Flooding Time Synchronization Protocol,” Proceedings of 2nd International Conference on Embedded Networked Sensor Systems, 2004, pp. 39-49. http://dx.doi.org/10.1145/1031495.1031501
- B. Sklar, “Rayleigh Fading Channels in Mobile Digital Communication Systems—Part 1: Characterization,” IEEE Communications Magazine, Vol. 35, No. 9, 1997, pp. 136-146. http://dx.doi.org/10.1109/35.620535
- Q. Chaudhari, E. Serpedin and K. Qaraqe, “On Minimum Variance Unbiased Estimation of Clock Offset in a TwoWay Message Exchange Mechanism,” IEEE Transactions on Information Theory, Vol. 56, No. 6, 2010, pp. 2893- 2904. http://dx.doi.org/10.1109/TIT.2010.2046233
- K. Romer and F. Mattern, “The Design Space of Wireless Sensor Networks,” IEEE Wireless Communication, Vol. 11, No. 6, 2004, pp. 54-61.