Positioning
Vol.06 No.04(2015), Article ID:60887,10 pages
10.4236/pos.2015.64008
Precise Point Positioning Technique with IGS Real-Time Service (RTS) for Maritime Applications
Mohammed El-Diasty1,2, Mohamed Elsobeiey1
1Department of Hydrographic Surveying, Faculty of Maritime Studies, King Abdulaziz University, Jeddah, Saudi Arabia
2Engineering Department of Public Works, Faculty of Engineering, Mansoura University, Mansoura, Egypt

Copyright © 2015 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).


Received 29 September 2015; accepted 1 November 2015; published 4 November 2015

ABSTRACT
The maritime navigation accuracy requirements for radionavigation systems such as GPS are specified by the International Maritime Organization (IMO). Maritime navigation usually consists of three major phases identified as Ocean/Coastal/Port approach/Inland waterway, in port navigation and automatic docking with an accuracy requirement that ranges from 10 m to 0.1 m. With the advancement in autonomous GPS positioning techniques such as Precise Point Positioning (PPP) and with the advent of the new IGS-Real-Time-Service (RTS), it is necessary to assess the possibility of a wider role of the PPP-based positioning technique in maritime applications. This paper investigates the performance of an autonomous real-time PPP-positioning solution by using the IGS- RTS service for maritime applications that require an accurate positioning system. To examine the performance of the real-time IGS-RTS PPP-based technique for maritime applications, kinematic data from a dual frequency GPS receiver is investigated. It is shown that the real-time IGS-RTS PPP-based GPS positioning technique fulfills IMO requirements for maritime applications with an accuracy requirement ranges from 10 m for Ocean/Coastal/Port approach/Inland waterways navigation to 1.0 m for in port navigation but cannot fulfill the automatic docking application with an accuracy requirement of 0.10 m. To further investigate the real-time PPP-based GPS positioning technique, a comparison is made between the real-time IGS-RTS PPP-based positioning technique and the real-time PPP-based positioning by using the predicted part of the IGS Ultra-Rapid products and the real-time GPS positioning technique with the Wide Area Differential GPS service (WADGPS). It is shown that the IGS-RTS PPP-based positioning technique is superior to the IGS-Ultra-Rapid PPP-based and WADGPS-based positioning techniques.
Keywords:
Real-Time Service, RTS, Maritime, Navigation, IGS, GPS, IMO, Ultra-Rapid, WADGPS

1. Introduction
The maritime navigation accuracy requirements for radionavigation systems such as GPS are specified by the International Maritime Organization (IMO). Marine navigation usually consists of three major phases identified as Ocean/Coastal/Port approach/Inland waterway, in port navigation and automatic docking with an accuracy requirement that ranges from 10 m to 0.1 m. To navigate safely, the pilot needs highly accurate determination of position almost continuously together with information depicting any tendency for the vessel to deviate from its intended track. Standards or requirements for safety of navigation are developed around the above three navigation phases. The accuracy of position-fixing should meet the minimum requirements for maritime users. Table 1 shows the IMO minimum maritime user requirements for horizontal absolute accuracy and integrity of GNSS based positioning [1] -[4] .
GPS positioning is widely used for many applications and is currently recognized by IMO for a future maritime navigation [1] . Therefore, the GPS positioning techniques that ranges from real-time kinematic (RTK) techniques to wide area differential GPS service (WADGPS) and integration of GPS with inertial navigation systems have been investigated by many researchers to investigate whether these techniques meet the IMO requirements from different maritime navigation phases [3] -[7] . Most recently, the International GNSS Service (IGS) produces precise GPS satellite orbit and clock corrections that are available in real-time. These products are known as the IGS Real-Time Service (IGS-RTS). Moreover, Precise Point Positioning (PPP) technology has shown promising light towards the development of an autonomous GPS solution for positioning applications where one GPS receiver is only employed. With the advancement in GPS positioning techniques such as PPP positioning and with the advent of new real-time GNSS correction services such as IGS-RTS service, it is necessary to assess the possibility of a wider role of the PPP-based positioning technique along with IGS-RTS service and their capability to enable new maritime applications. The PPP-based positioning solution using real-time IGS-RTS service is still under investigation by many researchers to examine and analyze its accuracy and solution performance in static and kinematic mode [8] [9] . However, it is essential to examine the positioning solution performance of real-time PPP-based IGS-RTS technique for all potential applications that require an accurate positioning such as maritime navigation applications in ports. The main objective of this paper is to investigate the performance of an autonomous real-time PPP-based GPS positioning technique by using the IGS real-time service (RTS) for maritime applications that require an accurate positioning system and whether the achieved accuracy can meet the IMO standards. To investigate the performance of the real-time IGS-RTS PPP-based positioning technique for maritime applications, kinematic data from a dual frequency Trimble BD960 GPS receiver is collected onboard a vessel and is investigated with the real-time IGS-RTS PPP-based GPS positioning technique. The achieved accuracy of the real-time IGS-RTS PPP-based GPS positioning technique is based on the estimated root-mean-squares errors when compared with RTK-based GPS system and is investigated whether it can meet the international standards (IMO standards) for maritime applications. To further investigate the real-time PPP- based GPS positioning technique, a comparison is made between the real-time IGS-RTS PPP-based positioning technique and the real-time PPP-based positioning technique using IGS Ultra-Rapid product with predicted satellite orbit and clock corrections and the real-time GPS positioning technique using the Wide area differential GPS (WADGPS) service [10] .
2. Real-Time IGS-RTS Precise Point Positioning (PPP) Based Method
Typically, real-time kinematic (RTK) RTK-based GPS method is widely used to provide positioning solution for maritime applications that require an accurate positioning. However, RTK-based GPS method requires the existing of at least one reference receiver to provide regional correction information to the rover receiver. The ma-

Table 1. IMO minimum maritime user requirements accuracy and integrity of GNSS based positioning [1] .
jor drawback of the RTK-based GPS method is the distance between the base station and the rover. Precise Point Positioning (PPP) has proven that it is a valuable method for single point positioning which can be applied over a global scale. PPP is a technique that can provide an accurate position with one single receiver. It is usually used in environment in which the installation of a reference station (for RTK) would be difficult or simply too expensive. It is very sensitive to cycle slip so clear-sky environment is recommended. The PPP technique is well described in [11] . It consists in using precise orbits and clock products, freely available on the IGS website or using private companies such as satellite link with Navcom Technology, which are considered as fundamental corrections for systematic satellite orbit and clock errors that cannot be modeled. The mathematical model for PPP is commonly described by the following two observation equations [11] :
 (1)
(1)
 (2)
(2)
where Piono-free and φiono-free are ionosphere free combination of L1 and L2 for pseudorange and carrier-phase measurements respectively,  is the geometric range between satellite and station, c is the vacuum speed of light, dt and dT are receiver and satellite clock offset that can be corrected by the employed precise clock products, respectively, T is the tropospheric delay, N is the float ambiguity and εP and εL are the relevant measurement noise, including satellite orbit residual error, multipath error and other un-modelled errors. Geometric range is a function of the satellite coordinates (XS, YS, ZS) that their accuracy are affected by the employed precise orbits products and the receiver coordinates (xr, yr, zr) that are considered as unknown parameters in the PPP estimator, which can be described by the following equation:
is the geometric range between satellite and station, c is the vacuum speed of light, dt and dT are receiver and satellite clock offset that can be corrected by the employed precise clock products, respectively, T is the tropospheric delay, N is the float ambiguity and εP and εL are the relevant measurement noise, including satellite orbit residual error, multipath error and other un-modelled errors. Geometric range is a function of the satellite coordinates (XS, YS, ZS) that their accuracy are affected by the employed precise orbits products and the receiver coordinates (xr, yr, zr) that are considered as unknown parameters in the PPP estimator, which can be described by the following equation:
 (3)
(3)
By the presence of the IGS, the PPP accuracy can reach a few millimeters with daily static observations [12] - [14] . However, kinematic positioning using PPP, even using the final IGS products, needs about 30 min to obtain sub-decimeter precision. Currently, the IGS provides an accurate GPS satellite orbit and clock corrections for real-time applications. These accurate real-time products are known as the IGS Real-Time Service (IGS- RTS). IGS-RTS utilizes the GPS data from more than 130 globally distributed stations to estimate the GPS satellite orbit and clock corrections. The IGS-RTS correction products are delivered to users over the Network Transport of RTCM by Internet Protocol (NTRIP) [15] .
The objective in this paper is to estimate the real-time IGS-RTS PPP-based navigation solution and investigate whether this navigation solution can meet the international standards (IMO standards) for maritime navigation. In the real-time IGS-RTS PPP-based GPS method, the GPS dual frequency measurements are employed to generate the so-called ionospheric-free linear combination, which remove the ionospheric error. The observation equations for ionospheric-free pseudorange and carrier phase measurements are processed to estimate the real-time IGS-RTS PPP-based GPS positions. To provide sub-decimeter level accuracy, after applying the major orbit, clock corrections and tropospheric dry corrections, the pseudorange and carrier phase measurement must be further corrected. This includes taking into account different corrections such as phase wind up effect, satellite antenna offset, solid earth tides, ocean loading, earth rotation parameters and eccentricity relativistic effect and Sagnac effect. Kouba and Heroux [11] , Leick [16] , Hofmann-Wellenhof et al. [17] , Laurichesse et al. [18] and Leandro [19] are the main references for PPP-based and RTK-based GPS positioning techniques. The PPP-based GPS positioning technique requires precise satellite position and corresponding clock information. For post-processing applications, PPP-based GPS solution is obtained using IGS final and rapid products that provide the estimated satellite orbit and clock corrections. For real-time applications, PPP-based GPS solution can be obtained using an IGS Ultra-Rapid product with predicted satellite orbit and clock corrections or RTS service that provide instantaneous satellite orbit and clock corrections. Table 2 shows the accuracy of different IGS products and shows that RTS products and Ultra-Rapid products can be used for real-time applications. It should be noted that, the accuracy of a satellite clock correction is fundamental to the final positioning solution using a PPP method. The root-mean-square of the current IGS-RTS satellite clock product is about 0.5 ns. Recent researches showed that using the IGS-RTS positioning technique, a user with a single GPS receiver can obtain precise results comparable to the RTK-based positioning technique [13] . However, it is necessary to assess the possibility of a wider role of the PPP-based positioning technique along with IGS-RTS service and their capability to enable new maritime applications.
Table 2. Precise GPS satellite orbits and clock corrections provided by the IGS.
In an autonomous PPP-based GPS positioning technique, the GPS raw data collected from an autonomous GPS receiver can be processed with real-time satellite orbit and clock corrections using the IGS-Ultra-Rapid predicted products or the IGS-RTS instantaneous products by employing one of the many PPP software packages such as CSRS-PPP developed by Natural Resources Canada (NRCan), GPS Analysis and Positioning Software (GAPS) developed by Rodrigo Leandro (University of New Brunswick), Automatic Precise Positioning Service (APPS) developed by Jet Propulsion Laboratory (JPL), magicGNSS by GMV). The type of the developed PPP filter to compute the position is fundamental such as a simple weighted least square filter, a sequential least squares filter and a Kalman filter. The applied filter determines the quality of the PPP software. Therefore, the above PPP software packages provide different solution. It should be noted that Martin et al. [20] showed that the CSRS-PPP of NRCan and magicGNSS of GMV produce the most favorable and comparable results for kinematic positioning, therefore the CSRS-PPP software of NRCan is employed in developing the real-time IGS-RTS PPP-based GPS navigation solution investigated in this paper.
3. Field System Test
To examine the performance of the IGS-RTS real-time PPP-based GPS positioning technique for maritime applications, a dual frequency GPS data (GPS pseudorange and carrier phase measurements) from a Trimble BD960 receiver was collected in October, 2013 in Port Lambton, Ontario, onboard vessel owned by the Canadian Hydrographic Service (CHS) of the Department of Fisheries and Oceans (DFO). The GPS receiver is connected to an additional receiver to receive and process the wide area differential GPS (WADGPS) corrections along with GPS measurements and estimate the GPS positions in real-time mode. Figure 1 shows the test trajectory. The length of the collected kinematic data is 20,611 s (about 5.72 hours). The base station GPS measurements at Lambton Port were simultaneously collected and employed to estimate the RTK-based GPS solution and considered as the reference solution to validate the real-time IGS-RTS PPP-based GPS positioning technique (our target). Moreover, the real-time IGS-Ultra-Rapid PPP-based GPS positioning technique and the real-time GPS positioning technique with the Wide area differential GPS (WADGPS) service were investigated and compared with the real-time IGS-RTS PPP-based GPS positioning technique.
4. Results and Discussion
The real-time PPP-based GPS positions were estimated from the CSRS-PPP software of NRCan with real-time satellite orbit and clock corrections using the IGS-RTS instantaneous products and the IGS-Ultra-Rapid predicted products. Also, the real-time GPS positions were obtained from the GPS receiver connected to an additional receiver that can receive and process the wide area differential GPS (WADGPS) corrections with GPS measurements in real-time mode. The performance accuracies of the IGS-RTS PPP-based GPS positioning technique, IGS-Ultra-Rapid PPP-based GPS positioning technique and WADGPS-based positioning technique were investigated whether it can meet the IMO standards for maritime navigation. It should be noted that the IMO minimum maritime user requirements horizontal absolute accuracy and integrity of GNSS based positioning are given at 95 confidence level (see Table 1). To investigate whether the absolute horizontal accuracy of
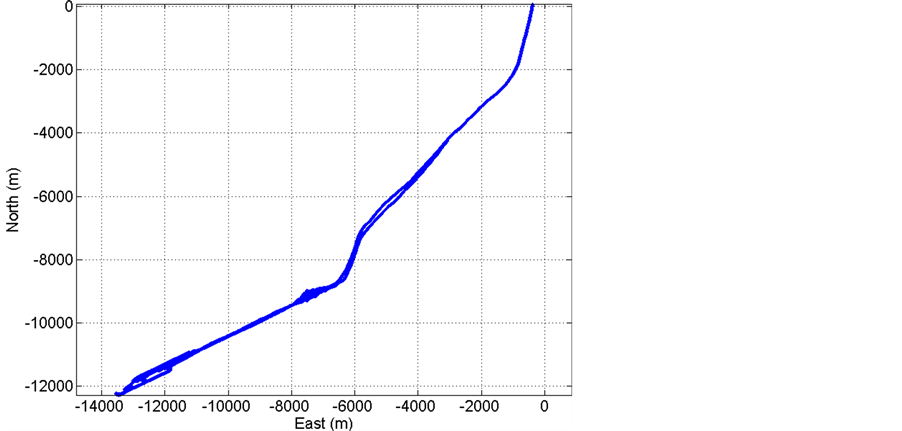
Figure 1. Test trajectory.
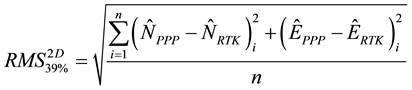
the real-time PPP-based GPS positioning technique meets the IMO requirements, the actual overall two dimensional (2D of northing and easting)  root-mean-squares error at 95% confidence level should be estimated as [4] :
root-mean-squares error at 95% confidence level should be estimated as [4] :
 , (4)
, (4)
 , (5)
, (5)
where  is the estimated overall root-mean-squares error from the 2D position error, the differences between the real-time PPP-based GPS solution and the reference RTK-based GPS solution, that is considered as RMS at 39% confidence level,
is the estimated overall root-mean-squares error from the 2D position error, the differences between the real-time PPP-based GPS solution and the reference RTK-based GPS solution, that is considered as RMS at 39% confidence level,  and
and  are the estimated northing and easting using real-time PPP- based technique,
are the estimated northing and easting using real-time PPP- based technique,  and
and  are the estimated northing and easting using real-time RTK-based technique (where it is considered as a “reference” value) and n is the total number of epochs. The estimated overall root- mean-squares error is
are the estimated northing and easting using real-time RTK-based technique (where it is considered as a “reference” value) and n is the total number of epochs. The estimated overall root- mean-squares error is  then compared against the IMO absolute horizontal accuracy given in Table 1. On the other hand, to monitor the integrity of the real-time PPP-based GPS positioning technique and investigate whether it meets the IMO requirements, the estimated epoch-by-epoch 2D position errors are compared against the IMO integrity given in Table 1. Integrity is relatively straight-forward to interpret when analyzing real data. If the 2D position error is obtained that is further than the IMO alert limit requirement, and no 2D position error closer than the alert limit are obtained within the IMO time-to-alarm requirement, then the IMO integrity requirement is not fulfilled. The integrity risk is taken as the proportion of 10 s periods over the course of the data collection that contains the IMO integrity requirements that are not fulfilled. It is worth noting that, IMO specifies that the integrity risk statistic should be over a period of 3 hours that are fully investigated with more than 5 hours of real data in this paper.
then compared against the IMO absolute horizontal accuracy given in Table 1. On the other hand, to monitor the integrity of the real-time PPP-based GPS positioning technique and investigate whether it meets the IMO requirements, the estimated epoch-by-epoch 2D position errors are compared against the IMO integrity given in Table 1. Integrity is relatively straight-forward to interpret when analyzing real data. If the 2D position error is obtained that is further than the IMO alert limit requirement, and no 2D position error closer than the alert limit are obtained within the IMO time-to-alarm requirement, then the IMO integrity requirement is not fulfilled. The integrity risk is taken as the proportion of 10 s periods over the course of the data collection that contains the IMO integrity requirements that are not fulfilled. It is worth noting that, IMO specifies that the integrity risk statistic should be over a period of 3 hours that are fully investigated with more than 5 hours of real data in this paper.
The performance accuracy of real-time PPP-based positioning technique based on IGS-RTS products (called as IGS-RTS PPP-based solution in this paper), IGS-Ultra-Rapid products (called as IGS-Ultra-Rapid PPP-based solution in this paper) and the wide area differential GPS (called as WADGPS-based solution in this paper) are investigated in the following two sub-sections and are identified as case 1, case 2 and case 3. Then, the performance of IGS-RTS PPP-based solution and the real-time IGS-Ultra-Rapid PPP-based solution are further implemented whether they meet IMO requirements in the fourth sub-section.
4.1. Case 1: Real-Time PPP-Based Technique with IGS-RTS Instantaneous Products
The main objective of this paper is the investigation of the performance accuracy of the IGS-RTS positioning technique and whether it meets the IMO standards for maritime applications. In this case, the real-time PPP- based GPS positioning technique using the IGS-RTS instantaneous products with real-time satellite orbit and clock corrections is investigated. Figure 2 shows the difference (errors) between the horizontal position (north and east) estimated from the real-time IGS-RTS PPP-based GPS solution and the position estimated from RTK- based GPS solution, where RTK is considered as a “reference” value. It is shown that the performance of the real-time IGS-RTS PPP-based GPS positioning technique converges to the favorable accuracy after about 1200 s (about 20 minutes). Figure 2 shows that the 2D horizontal error reaches about 0.10 m and becomes almost steady after the estimated convergence time.
Table 3 shows the estimated mean error, maximum error, root-mean-square error  (one sigma value at 39% confidence level) and root-mean-squares error
(one sigma value at 39% confidence level) and root-mean-squares error  (at 95% confidence level) of the real-time IGS-RTS PPP-based GPS solution for 2D horizontal position after the convergence to the favorable accuracy (about 20 minutes). It can be seen that the real-time IGS-RTS PPP-based GPS positioning technique can achieve 0.08 m (sub-decimeter accuracy) and 0.20 m for 2D horizontal position at 39% and 95% confidence levels, respectively, with a maximum error of about 0.22 m. It is worth noting that the real-time IGS-RTS PPP-based GPS positioning technique accuracy is of sub-decimeter accuracy and is comparable to the accurate RTK-based GPS positioning technique.
(at 95% confidence level) of the real-time IGS-RTS PPP-based GPS solution for 2D horizontal position after the convergence to the favorable accuracy (about 20 minutes). It can be seen that the real-time IGS-RTS PPP-based GPS positioning technique can achieve 0.08 m (sub-decimeter accuracy) and 0.20 m for 2D horizontal position at 39% and 95% confidence levels, respectively, with a maximum error of about 0.22 m. It is worth noting that the real-time IGS-RTS PPP-based GPS positioning technique accuracy is of sub-decimeter accuracy and is comparable to the accurate RTK-based GPS positioning technique.
4.2. Case 2: Real-Time PPP-Based Technique with IGS-Ultra-Rapid Predicted Products
In this case, the real-time PPP-based GPS positioning technique using the IGS-Ultra-Rapid predicted products with real-time satellite orbit and clock corrections is investigated. Figure 3 shows the difference (errors) between the horizontal position (north and east) estimated from the real-time IGS-Ultra-Rapid PPP-based GPS solution and the position estimated from RTK-based GPS solution. It can be seen that the performance of the
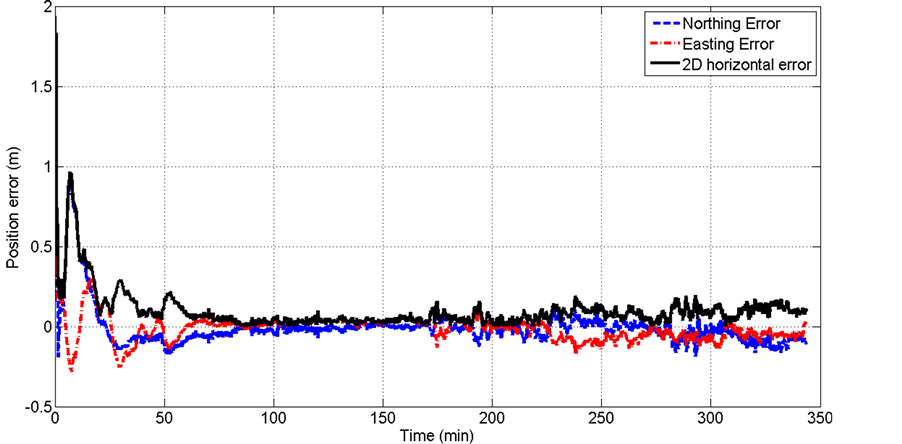
Figure 2. The northing, easting, and height errors estimated from the difference between the real-time IGS-RTS PPP-based GPS solution and RTK-based GPS solution.
Table 3. The summary statistics for IGS-RTS PPP-based GPS solution.
real-time IGS-Ultra-Rapid PPP-based GPS solution converges to a favorable accuracy after about 2400 s (about 40 minutes). Figure 3 shows that the 2D horizontal error reaches about 1.0 m and becomes almost steady after the estimated convergence time.
Table 4 shows the estimated mean error, maximum error, root-mean-square error  (one sigma value at 39% confidence level) and root-mean-squares error
(one sigma value at 39% confidence level) and root-mean-squares error  (at 95% confidence level) of the real-time IGS-Ultra-Rapid PPP-based GPS solution for 2D horizontal position after the convergence to the favorable accuracy. It can be seen that the real-time IGS-Ultra-Rapid PPP-based GPS positioning technique can achieve 0.60 m (sub-meter accuracy) and 1.5 m for 2D horizontal position at 39% and 95% confidence levels, respectively, with a maximum error of about 1.0 m. It is worth noting that the IGS-RTS PPP-based positioning technique is superior to the IGS-Ultra-Rapid PPP-based positioning technique and with a shorter solution convergence time to reach the favorable accuracy. The reason behind the superiority of the IGS-RTS PPP-based positioning accuracy and convergence time over of the IGS-Ultra-Rapid PPP-based positioning accuracy and convergence time is that the accuracy of the IGS-RTS precise clock product is about one order of magnitude (ten times) better than the accuracy of the IGS-Ultra-Rapid clock product as shown in Table 2.
(at 95% confidence level) of the real-time IGS-Ultra-Rapid PPP-based GPS solution for 2D horizontal position after the convergence to the favorable accuracy. It can be seen that the real-time IGS-Ultra-Rapid PPP-based GPS positioning technique can achieve 0.60 m (sub-meter accuracy) and 1.5 m for 2D horizontal position at 39% and 95% confidence levels, respectively, with a maximum error of about 1.0 m. It is worth noting that the IGS-RTS PPP-based positioning technique is superior to the IGS-Ultra-Rapid PPP-based positioning technique and with a shorter solution convergence time to reach the favorable accuracy. The reason behind the superiority of the IGS-RTS PPP-based positioning accuracy and convergence time over of the IGS-Ultra-Rapid PPP-based positioning accuracy and convergence time is that the accuracy of the IGS-RTS precise clock product is about one order of magnitude (ten times) better than the accuracy of the IGS-Ultra-Rapid clock product as shown in Table 2.
4.3. Case 3: Real-Time PPP-Based Technique with Wide Area Differential GPS (WADGPS) Service
In this case, the real-time GPS positioning technique using the Wide area differential GPS (WADGPS) service is investigated. Figure 4 shows the difference (errors) between the horizontal position (north and east) estimated from the real-time WADGPS-based solution and the position estimated from RTK-based GPS solution. It is shown that the performance of the real-time WADGPS-based solution is contaminated by high level of noise where the WADGPS-based positioning technique is mainly dependent on the GPS pseudorange measurements that are corrected using only the satellite orbit and clock corrections in this paper (dual frequency receiver case).
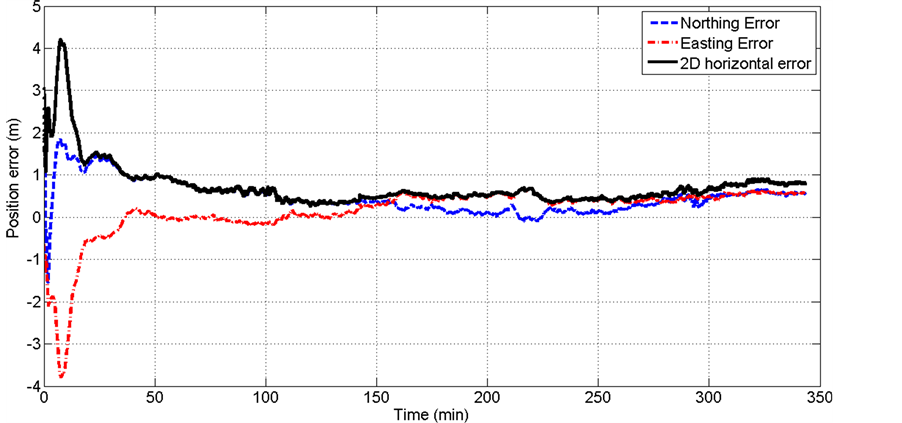
Figure 3. The northing, easting, and height errors estimated from the difference between the real-time IGS- Ultra-Rapid PPP-based GPS solution and RTK-based GPS solution.
Table 4. The summary statistics for IGS-ultra-rapid PPP-based GPS solution.
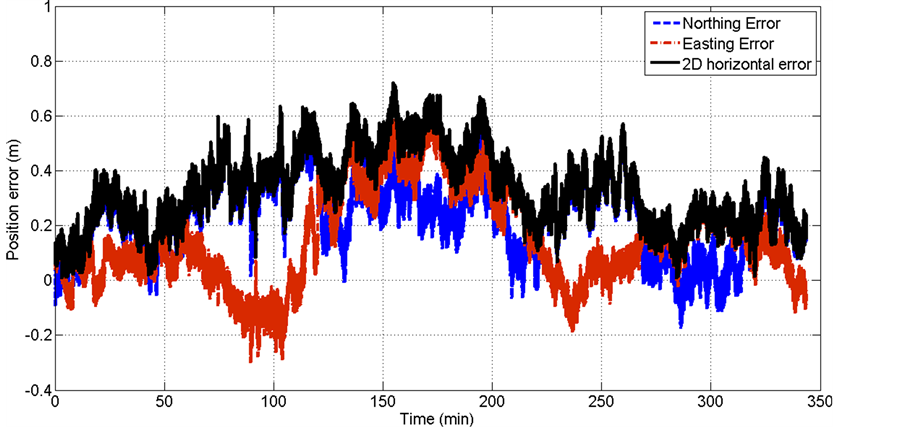
Figure 4. The northing, easting, and height errors estimated from the difference between the real-time WADGPS-based GPS solution and RTK-based GPS solution.
Table 5. The summary statistics for WADGPS-based GPS solution.
Table 5 shows the estimated mean error, maximum error, root-mean-square error  (one sigma value at 39% confidence level) and root-mean-squares error
(one sigma value at 39% confidence level) and root-mean-squares error  (at 95% confidence level) of the real-time WADGPS-based GPS solution for 2D horizontal position. It can be seen that the real-time WADGPS-based GPS positioning technique can achieve 0.37 m (sub-meter accuracy) and 0.90 m for 2D horizontal position at 39% and 95% confidence levels, respectively, with a maximum error of about 0.72 m. It should be noted that the IGS-RTS PPP-based positioning technique is superior to the WADGPS-based positioning technique. The reason behind the superiority of the IGS-RTS PPP-based positioning accuracy over of the WADGPS-based positioning accuracy is that the IGS-RTS PPP-based positioning technique employs the pseudorange and carrier phase measurements along with the IGS-RTS precise orbit and clock products that provide solution at sub-decimeter level accuracy; however, WADGPS-based positioning technique employs only pseudorange measurements along with the WADGPS orbit and clock corrections that provide solution at sub-meter level accuracy.
(at 95% confidence level) of the real-time WADGPS-based GPS solution for 2D horizontal position. It can be seen that the real-time WADGPS-based GPS positioning technique can achieve 0.37 m (sub-meter accuracy) and 0.90 m for 2D horizontal position at 39% and 95% confidence levels, respectively, with a maximum error of about 0.72 m. It should be noted that the IGS-RTS PPP-based positioning technique is superior to the WADGPS-based positioning technique. The reason behind the superiority of the IGS-RTS PPP-based positioning accuracy over of the WADGPS-based positioning accuracy is that the IGS-RTS PPP-based positioning technique employs the pseudorange and carrier phase measurements along with the IGS-RTS precise orbit and clock products that provide solution at sub-decimeter level accuracy; however, WADGPS-based positioning technique employs only pseudorange measurements along with the WADGPS orbit and clock corrections that provide solution at sub-meter level accuracy.
4.4. Real-Time PPP-Based IGS-RTS, IGS-Ultra-Rapid PPP-Based and WADGPS-Based Positioning Techniques Investigated Vis-À-Vis IMO Requirements
IMO requirements for horizontal position limits are given at 95% confidence level in Table 1. To investigate whether the performance of the real-time GPS solution meets the IMO requirements, the estimated 2D root-mean- squares error  should be less than the horizontal absolute accuracy limit (accuracy check) and the estimated maximum 2D position error should be less than the horizontal alarm limit for a time duration of more than 3 hours with no gap (integrity check). Table 6 shows that the real-time IGS-Ultra-Rapid PPP-based GPS solution fulfills only the Ocean/Coastal/Port approach/Inland waterway phase and both the real-time IGS-RTS PPP-based GPS solution and WADGPS-based GPS solution fulfill the Ocean/Coastal/Port approach/Inland waterway phase and in port navigation phase. However, it is also shown in Table 6 that none of the three real-time GPS positioning techniques fulfills the automatic docking phase with a stringent IMO accuracy requirement of 0.10 m.
should be less than the horizontal absolute accuracy limit (accuracy check) and the estimated maximum 2D position error should be less than the horizontal alarm limit for a time duration of more than 3 hours with no gap (integrity check). Table 6 shows that the real-time IGS-Ultra-Rapid PPP-based GPS solution fulfills only the Ocean/Coastal/Port approach/Inland waterway phase and both the real-time IGS-RTS PPP-based GPS solution and WADGPS-based GPS solution fulfill the Ocean/Coastal/Port approach/Inland waterway phase and in port navigation phase. However, it is also shown in Table 6 that none of the three real-time GPS positioning techniques fulfills the automatic docking phase with a stringent IMO accuracy requirement of 0.10 m.
Table 6. Real-time IGS-RTS PPP-based, IGS-Ultra-Rapid PPP-based and WADGPS-based real-time solutions investigated vis-à-vis IMO standards.
5. Conclusion and Recommendation
This paper investigated an accurate autonomous worldwide real-time PPP-based GPS positioning system using the IGS real-time service (RTS) product for maritime applications that require an accurate positioning system and whether the achieved accuracy can meet the IMO standards. It is found that the real-time IGS-RTS PPP- based GPS solution fulfills IMO requirements at 95 confidence level for maritime applications with an accuracy requirement ranges from 10 m for Ocean/Coastal/Port approach/Inland waterways navigation to 1.0 m for in port navigation but cannot fulfill the automatic docking application with an accuracy requirement of 0.10 m. To further investigate the real-time PPP-based GPS positioning technique, a comparison was made between the real-time IGS-RTS PPP-based positioning technique and the real-time PPP-based positioning technique by using an IGS Ultra-Rapid product and the real-time GPS positioning technique with the Wide area differential GPS (WADGPS) service. It is found that the IGS-RTS PPP-based positioning technique is superior to the Ultra- Rapid PPP-based positioning technique and the WADGPS-based GPS positioning technique with a shorter convergence time to reach the favorable accuracy when compared with Ultra-Rapid PPP-based positioning. Also, it is found that the real-time IGS-Ultra-Rapid PPP-based GPS positioning technique fulfills only the Ocean/ Coast- al/Port approach/Inland waterway phase, but the WADGPS-based positioning technique fulfills the Ocean/ Coastal/Port approach/Inland waterway and in port navigation phases. It is worth noting that none of the three real-time GPS positioning techniques fulfills the automatic docking navigation phase with a stringent IMO accuracy requirement of 0.10 m. In conclusion, the IGS-RTS PPP-based positioning technique can fulfill the IMO requirements for Ocean/Coastal/Port approach/Inland waterway and in port navigation phases with high level of confidence when compared with the IGS-Ultra-Rapid PPP-based and WADGPS-based positioning techniques and it is recommended to wait about 30 minutes to converge to the favorable accuracy. However, automatic docking navigation phase cannot be fulfilled with IGS-RTS PPP-based GPS positioning technique and may need an aiding system to improve the accuracy and hence can fulfill its stringent IMO requirement.
Acknowledgements
The authors would like to acknowledge the Canadian Hydrographic Service (CHS) for providing the kinematic test data of POS-MV system. We would also like to thank the Geodetic Survey Department of the Natural Resources of Canada (NRCan) for kindly providing the Canadian Spatial Reference System―Precise Point Positioning (CSRS-PPP) software package.
Cite this paper
MohammedEl-Diasty,11,MohamedElsobeiey, (2015) Precise Point Positioning Technique with IGS Real-Time Service (RTS) for Maritime Applications. Positioning,06,71-80. doi: 10.4236/pos.2015.64008
References
- 1. IMO Resolution A.915(22) (2002) Revised Maritime Policy and Requirements for a Future GNSS. Adopted on January 22nd, 2002, London.
- 2. IMO Resolution A.953(23) (2004) Revised World-Wide Radionavigation System. Adopted on February 26th, 2004, London.
- 3. Parkins, A. (2009) Performance of Precise Marine Positioning Using Future Modernised Global Satellite Positioning Systems and a Novel Partial Ambiguity Resolution Technique. PhD Thesis, Department of Civil, Environmental and Geomatic Engineering, UCL, London, United Kingdom.
- 4. El-Diasty, M. (2010) Development of a MEMS-Based INS/GPS Vessel Navigation System for Marine Applications. PhD Dissertation, Publication Number NR64919, York University, Toronto.
- 5. Moore, T., Hill, C. and Monteiro, L. (2001) Is DGPS Still a Good Option for Mariners? The Journal of Navigation, 54, 437-446. http://dx.doi.org/10.1017/S0373463301001552
- 6. Fairbanks, M., Ward, N., Roberts, W., Dumville, M. and Ashkenazi, V. (2004) GNSS Augmentation Systems in the Maritime Sector. ION NTM, San Diego, 26-28 January 2004, 662-673.
- 7. Moore, T., Hill, C., Norris, A., Hide, C., Park, D. and Ward, N. (2008) The Potential Impact of GNSS/INS Integration on Maritime Navigation. The Journal of Navigation, 61, 221-237.
http://dx.doi.org/10.1017/S0373463307004614 - 8. Elsobeiey, M. and Al-Harbi, S. (2015) Performance of Real-Time Precise Point Positioning Using IGS Real-Time Service. GPS Solutions, 1-7 http://dx.doi.org/10.1007/s10291-015-0467-z
- 9. Grinter, T. and Roberts, C. (2013) Real Time Precise Point Positioning: Are We There Yet? IGNSS Symposium, Outrigger Gold Coast, 16-18 July 2013, Paper 8.
- 10. Rho, H. and Langley, R. (2005) Dual-Frequency GPS Precise Point Positioning with WADGPS Corrections. ION GNSS 2005, Long Beach, 13-16 September 2005, 1470-1482.
- 11. Kouba, J. and Heroux, P. (2001) Precise Point Positioning Using IGS Orbit Products. GPS Solutions, 5, 12-28. http://dx.doi.org/10.1007/PL00012883
- 12. Yigit, C.O., Gikas, V., Alcay, S. and Ceylan, A. (2013) Performance Evaluation of Short to Long Term GPS, GLONASS and GPS/GLONASS Post-Processed PPP. Survey Review, 46, 155-166.
http://dx.doi.org/10.1179/1752270613Y.0000000068 - 13. Rizos, C., Janssen, V., Roberts, C. and Grinter, T. (2012) GNSS: Precise Point Positioning PPP versus DGNSS. Geomatics World (October), 18-20.
- 14. El-Mowafy, A. (2011) Analysis of Web-Based GNSS Post-Processing Services for Static and Kinematic Positioning Using Short Data Spans. Survey Review, 43, 535-549.
http://dx.doi.org/10.1179/003962611X13117748892074 - 15. IGS (2015) IGS Real-Time Service.
ftp://igs.org/pub/resource/pubs/IGS_Real_Time_Service-131031.pdf - 16. Leick, A. (2004) GPS Satellite Surveying. 2nd Edition, John Wiley & Sons, Hoboken.
- 17. Hofmann-Wellenhof, B., Lichtenegger, H. and Walse, E. (2008) GNSS Global Navigation Satellite Systems; GPS, Glonass, Galileo & More. Springer Wien, New York.
- 18. Laurichesse, D., Mercier, F., Berthias, J.P., Broca, P. and Cerri, L. (2009) Integer Ambiguity Resolution on Undifferenced GPS Phase Measurements and Its Application to PPP and Satellite Precise Orbit Determination. Navigation, Journal of the Institute of Navigation, 56, 135-149.
- 19. Leandro, R.F. (2009) Precise Point Positioning with GPS: A New Approach for Positioning, Atmospheric Studies, and Signal Analysis. PhD Thesis, Technical Report No. 267, University of New Brunswick, Fredericton, 232 p.
- 20. Martín, A., Anquela, A., Berné, J. and Sanmartin, M. (2005) Kinematic GNSS-PPP Results from Various Software Packages and Raw Data Configurations. Scientific Research and Essays, 7, 419-431.