Applied Mathematics
Vol.5 No.6(2014), Article ID:44490,9 pages DOI:10.4236/am.2014.56080
Dynamics Behaviors of a Reaction-Diffusion Predator-Prey System with Beddington-DeAngelis Functional Response and Delay
Peng Du, Caixia Duan, Xinyuan Liao*
School of Mathematics and Physics, University of South China, Hengyang, China
Email: *xinyuanliao88@yahoo.com
Copyright © 2014 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/


Received 21 November 2013; revised 21 December 2013; accepted 4 January 2014
ABSTRACT
This paper is concerned with the existence of traveling wave solutions in a reaction-diffusion predator-prey system with Beddington-DeAngelis functional response and a discrete time delay. By introducing a partial quasi-monotonicity condition and constructing a pair of upper-lower solutions, we establish the existence of traveling wave solutions. Moreover, a numerical simulation is carried out to illustrate the theoretical results.
Keywords:Traveling Wave Solutions, Reaction-Diffusion System, Upper-Lower Solutions, Local Stability

1. Introduction
Recently, the dynamics of predator-prey systems is one of the fastest developing areas of modern mathematics due to their significant nature in biological fields and other practical fields. One significant component in these systems is the functional response describing the number of prey consumed per predator per unit time for given quantities of prey N and predators P. The traditional mathematical model describing the predator-prey interactions consists of the following system of differential equations.
In recent years, many authors have explored the dynamic relationship between predators and their preys. There is extensive literature related to these topics for ordinary differential equation models (see [1] -[6] and the references cited therein). We know that more realistic prey-predator models were introduced by Holling suggesting three kinds of functional responses for different species to model the phenomena of predation [3] . On the other hand, species have the natural tendency to move from areas of bigger population concentration to those of smaller population concentration. This kind of diffusion process is called free diffusion and it is not considered in the above mentioned references. In the literature, many researchers have directly introduced the free diffusion to ODEs and DDEs and have also explained why to do so. To name a few, see [7] -[14] . Moreover, such models or similar models with delays and free diffusion have also arisen from a variety of situations like infectious disease dynamics, porous medium, chemical reaction, engineering control theory. Taking into account the inhomogeneous distribution of the species in different spatial locations within a fixed bounded domain , Peng and Wang looked at a diffusive HollingTanner prey-predator model in [7]
, Peng and Wang looked at a diffusive HollingTanner prey-predator model in [7]
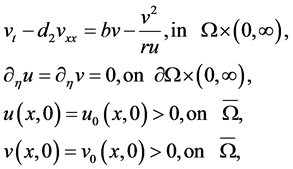 (1.1)
(1.1)
where  and
and  represent the species densities of the prey and predator, respectively.
represent the species densities of the prey and predator, respectively.  is the outward unit normal vector on the smooth boundary
is the outward unit normal vector on the smooth boundary .The constants
.The constants  are the diffusion coefficients corresponding to
are the diffusion coefficients corresponding to  and
and , respectively, and all the parameters appearing in (1.1) are assumed to be positive. The admissible initial data
, respectively, and all the parameters appearing in (1.1) are assumed to be positive. The admissible initial data  and
and  are continuous functions on
are continuous functions on . The homogeneous Neumann boundary condition means that (1.1) is self-contained and has no population flux across the boundary
. The homogeneous Neumann boundary condition means that (1.1) is self-contained and has no population flux across the boundary . For more detailed biological implications of the model, one may further refer to [7] and the references cited therein.
. For more detailed biological implications of the model, one may further refer to [7] and the references cited therein.
In recent years, great attention has been paid to the study of the existence of traveling wave solutions in reactiondiffusion system, since they determine the long term behavior of other solutions, and account for phase transitions between different states of physical systems, propagation of patterns, and domain invasion of species in population biology (see, for example, [10] -[12] , and the references cited therein).
Motivated by the work of Peng and Wang [7] and Wu, Zou [12] , in the present paper, we consider the existence of traveling waves of the following predator-prey model with Beddington-DeAngelis functional response and a discrete time delay due to gestation of predator
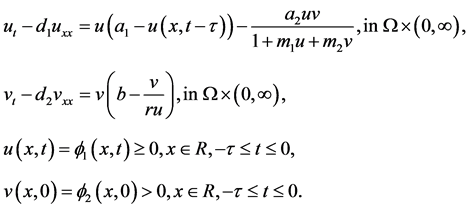 (1.2)
(1.2)
The main purpose of the paper is to consider the existence of traveling wavefronts for the delay model (1.2). In order to study traveling wavefronts, we need to analyze the stability of the positive constant equilibrium first. As a result, the remaining part of this paper is organized as follows. We first use linearized method to study the stability of the positive constant equilibrium of (1.2) in Section 2. Then, applying the method of upper and lower solutions, we establish the existence of traveling wavefronts of (1.2) in Section 3. At the same time, we give some suitable examples to illustrate our results.
2. Asymptotical Stability of the Positive
Constant Equilibrium
Set the right side of the system (1.2) to zero. It is easy to check that the system (1.2) has an axial equilibrium  and a unique positive equilibrium
and a unique positive equilibrium , where
, where

And . In this section, we discuss the locally asymptotical stability of the positive constant equilibrium by the linearized method. The linearized system of (1.2) about a positive constant equilibrium
. In this section, we discuss the locally asymptotical stability of the positive constant equilibrium by the linearized method. The linearized system of (1.2) about a positive constant equilibrium  is
is
 (2.1)
(2.1)
System (2.1) admits nontrivial solutions of the form  if and only if the determinant
if and only if the determinant
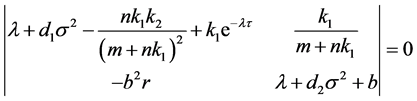
which implies that
 (2.2)
(2.2)
where  is a complex number and
is a complex number and  is a real number (see, for example, Ge and He [11] and the references therein).
is a real number (see, for example, Ge and He [11] and the references therein).
It is easy to check that , so, we rewrite (2.2) as
, so, we rewrite (2.2) as
 (2.3)
(2.3)
We claim that , if
, if  satisfies (2.3) and
satisfies (2.3) and  is sufficiently small. Otherwise, suppose that there exists a
is sufficiently small. Otherwise, suppose that there exists a  satisfying (2.3) such that
satisfying (2.3) such that . Then direct computation gives us
. Then direct computation gives us

We can prove that  So, if
So, if  is sufficiently small, we have
is sufficiently small, we have
It is a contradiction. This proves the claim. As a result, we have proved.
Theorem 2.1. The positive equilibrium  of (1.2) is locally asymptotically stable for
of (1.2) is locally asymptotically stable for  sufficiently small.
sufficiently small.
Remark 2.1. In [7] , it was showed the following result: Suppose that . Then positive equilibrium of (1.1) is asymptotically stable. However, in this paper, we also obtain the asymptotical stability about the positive equilibrium without conditions in absence time delay
. Then positive equilibrium of (1.1) is asymptotically stable. However, in this paper, we also obtain the asymptotical stability about the positive equilibrium without conditions in absence time delay .
.
In order to illustrate the validity of the theoretical result on the asymptotical stability, we perform numerical calculations using the software MATLAB.
Consider the following system:
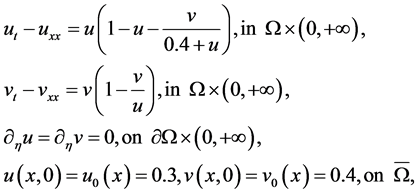
the positive equilibrium  of system (1.2) is locally asymptotically stable (see Figure 1 and Figure 2).
of system (1.2) is locally asymptotically stable (see Figure 1 and Figure 2).
3. Existence of Traveling Wavefront
A traveling wave solution of (1.2) is a special translation invariant solution of the from
 with wave speed c. Various methods including the monotone itera-
with wave speed c. Various methods including the monotone itera-

Figure 1. .
.
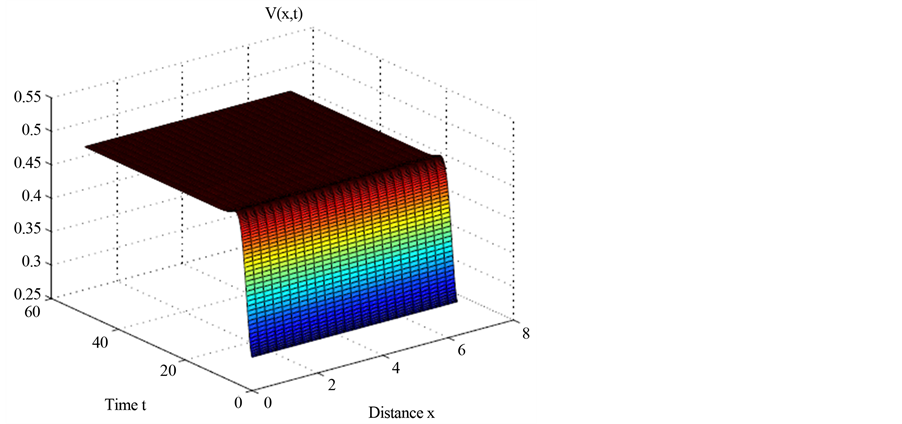
Figure 2. .
.
tion technique [11] [12] and the degree theory [10] have been adopted to study the existence of traveling wave solutions to reaction-diffusion systems with delays. In this section, we use the approach introduced by Canosa [14] to establish the existence of traveling wave solutions connecting the axial equilibrium  to the positive equilibrium
to the positive equilibrium . To seek such a pair of traveling wavefronts of (1.2), we substitute
. To seek such a pair of traveling wavefronts of (1.2), we substitute  and
and , where
, where , into (1.2) to obtain
, into (1.2) to obtain
 (3.1)
(3.1)
Now, we follow the approach of Canosa [14] to construct a uniformly valid asymptotic approximation to the wavefronts for large values of the wave speed c. Suppose that c is large enough. Then  is a small parameter. We aim to seek a pair of solutions to (3.1) of the form
is a small parameter. We aim to seek a pair of solutions to (3.1) of the form

Then (3.1) becomes
 (3.2)
(3.2)
Denote

and substitute them into (3.2). It turns out that  and
and  satisfy
satisfy
 (3.3)
(3.3)
For simplicity of notation, we still denote 
 by
by , respectively. Then (3.3) becomes
, respectively. Then (3.3) becomes
 (3.4)
(3.4)
Now, we are ready to state and prove the following result by the upper and lower solution technique developed by Wu and Zou [12] .
Theorem 3.1. System (1.2) has a traveling wavefront connecting  to
to  for
for  sufficiently small.
sufficiently small.
Proof. The proof is divided into the following two steps.
Step I: Verify a quasi-monotonicity condition. For this purpose, we define the functional

by
 (3.5)
(3.5)
For arbitrary  and
and  such that
such that
and  and
and  we have
we have

which implies

Similarly, we can get

Therefore, if we choose 
 , then by continuity we know that, for
, then by continuity we know that, for  sufficiently small,
sufficiently small,
 . This proves the quasi-monotonicity condition.
. This proves the quasi-monotonicity condition.
Step II: Establish the existence of a pair of upper and lower solutions. To achieve this, we look for wave front solutions of (3.1) in the following profile set

Define

And  where
where 
Then  We distinguish two cases to show that
We distinguish two cases to show that  is a pair of upper solutions to (3.4).
is a pair of upper solutions to (3.4).
Case I: s < 0. It is easy to see that

Thus

Similarly,

Case II: . We have
. We have

which implies that

Therefore,

and

The above discussion tells us that  is an upper solution to (3.4).
is an upper solution to (3.4).
Now, define
 (3.6)
(3.6)
where
 (3.7)
(3.7)
Using (3.6)-(3.7) we have

if  and
and

if  This proves that
This proves that  is a pair of lower solutions to (3.4).
is a pair of lower solutions to (3.4).
So far, we have verified all the assumptions in the theory developed by Wu and Zou [12] . Therefore, there exists at least one solution in the set , that is, system (1.2) has a traveling wavefront solution connecting
, that is, system (1.2) has a traveling wavefront solution connecting  to
to .This completes the proof.
.This completes the proof.
Remark 3.1. We study the existence of traveling wave for a reaction-diffusion Holling-Tanner model with delay. In order to illustrate the validity of the theoretical result obtained in this section, we also perform numerical calculations using the software MATLAB.
Consider the following Holling-Tanner system:
 (3.8)
(3.8)
It should satisfy the following boundary conditions:

where 
 Fix
Fix 
 Then system (3.8) has a positive equilibrium
Then system (3.8) has a positive equilibrium . By Theorem 3.1, we see that system (3.8) has a traveling wave solution connecting the axial solution
. By Theorem 3.1, we see that system (3.8) has a traveling wave solution connecting the axial solution  with the positive equilibrium
with the positive equilibrium  when the wave speed c is larger. Numerical simulation can be carried out by using MATLAB7.01. See Figure 3. However, when the wave speed c is smaller, the system (3.8) doesn’t exist the traveling wave solution. Following we also give a simulation to illustrate our result. See Figure 4.
when the wave speed c is larger. Numerical simulation can be carried out by using MATLAB7.01. See Figure 3. However, when the wave speed c is smaller, the system (3.8) doesn’t exist the traveling wave solution. Following we also give a simulation to illustrate our result. See Figure 4.

Figure 3. The wave speed c = 6, c = 2.3.
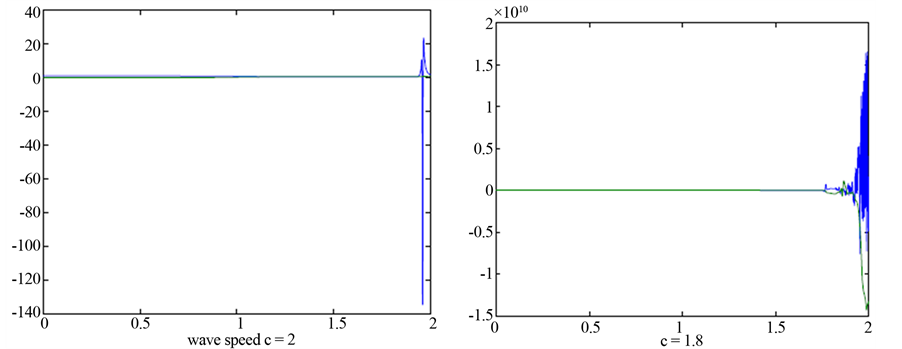
Figure 4. The wave speed c = 2, c = 1.8.
Of course, we mention that the smallest wave speed should exist in between  and
and  by numerical simulation, theoretical proof of the existence of such wave speed seems extraordinarily difficult in this paper and this remains as our future work.
by numerical simulation, theoretical proof of the existence of such wave speed seems extraordinarily difficult in this paper and this remains as our future work.
4. Conclusion
In summary, when  sufficiently small, we have obtained the positive equilibrium
sufficiently small, we have obtained the positive equilibrium  of system (1.2) which is locally asymptotically stable. At the time, we establish the existence of traveling wavefronts of (1.2) connecting
of system (1.2) which is locally asymptotically stable. At the time, we establish the existence of traveling wavefronts of (1.2) connecting  to
to  .
.
References
- Nindjina, A.F., Aziz-Alaouib, M.A. and Cadivelb, M. (2006) Analysis of a Predator-Prey Model with Modified Leslie-Gower and Holling-Type II Schemes with Time Delay. Nonlinear Analysis: Real World Applications, 7, 1104-1118. http://dx.doi.org/10.1016/j.nonrwa.2005.10.003
- Lu, Z. and Liu, X. (2008) Analysis of a Predator-Prey Model with Modified Holling-Tanner Functional Response and Time Delay. Nonlinear Analysis: Real World Applications, 9, 641-650. http://dx.doi.org/10.1016/j.nonrwa.2006.12.016
- Holling, C.S. (1965) The Functional Response of Predator to Prey Density and Its Role in Mimicry and Population Regulation. Entomological Society of Canada, 45, 1-60. http://dx.doi.org/10.4039/entm9745fv
- Braza, P.A. (2003) The Bifurcations Structure for the Holling-Tanner Model for Predator-Prey Interactions Using Two-Timing. SIAM Journal on Applied Mathematics, 63, 889-904. http://dx.doi.org/10.1137/S0036139901393494
- Haquea, M. and Venturino, E. (2006) The Role of Transmissible Diseases in the Holling-Tanner Predator-Prey Model. Theoretical Population Biology, 70, 273-288. http://dx.doi.org/10.1016/j.tpb.2006.06.007
- Saha, T. and Chakrabarti, C. (2009) Dynamical Analysis of a Delayed Ratio-Dependent Holling-Tanner Predator-Prey Model. Journal of Mathematical Analysis and Applications, 358, 389-402. http://dx.doi.org/10.1016/j.jmaa.2009.03.072
- Peng, R. and Wang, M. (2007) Global Stability of the Equilibrium of a Diffusive Holling-Tanner Prey-Predator Model. Applied Mathematics Letters, 20, 664-670. http://dx.doi.org/10.1016/j.aml.2006.08.020
- Yan, X. and Zhang, C. (2010) Asymptotic Stability of Positive Equilibrium Solution for a Delayed Prey-Predator Diffusion System. Applied Mathematical Modelling, 34, 184-199. http://dx.doi.org/10.1016/j.apm.2009.03.040
- Peng, R. and Shi, J. (2009) Non-Existence of Non-Constant Positive Steady States of Two Holling Type-II Predator-Prey Systems: Strong Interaction Case. Journal of Differential Equations, 247, 866-886. http://dx.doi.org/10.1016/j.jde.2009.03.008
- Ma, S. (2001) Traveling Wavefronts for Delayed Reaction—Diffusion Systems via a Fixed Point Theorem. Journal of Differential Equations, 171, 294-314. http://dx.doi.org/10.1006/jdeq.2000.3846
- Ge, Z. and He, Y. (2009) Traveling Wavefronts for a Two-Species Predator-Prey System with Diffusion Terms and Stage Structure. Applied Mathematical Modelling, 33, 1356-1365. http://dx.doi.org/10.1016/j.apm.2007.09.037
- Wu, J. and Zou, X. (2001) Traveling Wave Fronts of Reaction—Diffusion Systems with Delay. Journal of Dynamics and Differential Equations, 13, 651-687.
- Zou, X. (2002) Delay Induced Traveling Wave Fronts in Reaction Diffusion Equations of KPP-Fisher Type. Journal of Computational and Applied Mathematics, 146, 309-321. http://dx.doi.org/10.1016/S0377-0427(02)00363-1
NOTES

*Corresponding author.