Modern Economy
Vol.07 No.03(2016), Article ID:64364,6 pages
10.4236/me.2016.73025
Modeling and Control of Equipment Leasing System Based on Hybrid Automaton
Ying Tian
Liaoning Technical University, Fuxin, China

Copyright © 2016 by author and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 3 January 2016; accepted 7 March 2016; published 10 March 2016
ABSTRACT
The large equipment leasing and management is mainly to control the device and use. The equipment leasing is a discrete control variable, but the disturbance input variable (equipment depreciation costs, maintenance costs, transportation costs, storage costs) is continuous. Therefore, the equipment rental system is a typical mixed system to equipment depreciation costs, maintenance costs, transportation costs, storage costs as a system can be measured disturbance input variables, system leasing system output variables, control equipment demand-driven variables, equipment rental system hybrid automata model, using measured data for simulation. The equipment rental system fit automaton model can reach more than 94%, the maximum prediction error hybrid system control of 2%, and it can better control dynamics equipment rental system.
Keywords:
Hybrid Automaton, Equipment Leasing System, Model

1. Introduction
Disturbance equipment rental system is often presented as a complex dynamic behavior of continuous and discrete events interacting with continuous dynamics and discrete event dynamic system behavior, and interactions between the two have been called hybrid dynamic systems. Equipment rental system is a typical hybrid system. Equipment leasing demand expressed as a discrete event-driven behavior, which is often based on the discrete behavior disturbance variable equipment costs, maintenance costs, storage costs and other continuous dynamic behavior. Generate discrete event changed the topology of agency equipment rental system, causing changes in the way the system is running. It may cause system instability, and even cause splitting system. And in the market fluctuated, continuous and discrete event dynamic interleaving effect makes equipment leasing system become a strong nonlinear and non-unified hybrid dynamic system. Traditional research methods are difficult to use theoretical framework for such a system to complex modeling and analysis of behavior.
Research on hybrid system theory is just emerging in the international community since the 1990s. The theoretical system has been initially established by the IEEE Control Association, called the new discipline which has great prospects of development and application. Hybrid control in other industries has been widely used, such as automatic speed system [1] , air traffic management system [2] and manufacturing [3] . Hybrid automata theory and Petri net theory are the main methods of hybrid systems research. We discuss the research methods such as hybrid power system model [4] using the finite automata theory, and in the literature [5] in the theory of automata and Petri nets, combine research model in electricity inverse problem, when using the programmable proposed timed Petri nets in the literature [6] to build hybrid power system model approach. In the literature [7] in a hierarchical order model on the basis of the delivery structure, mixed Petri network established its process layer model to study the method based on Matlab simulation HPN model using Stateflow software package for the sewage pumping station control system HPN model simulation analysis. In the literature [8] by the outdoor environmental factors as a continuous input system, sunroof opened and closed as a discrete variable. The room temperature as a continuous output, the establishment of a greenhouse hybrid automata model, augmented using recursive minimum convergence squares identification model parameters, intelligent level oversight of the model parameters, based on the basic model of a finite state automaton establishing temperature hybrid automata. Lou xuyan [9] proposes a hybrid control strategy under an encoded control mechanism. The fault diagnosability of the hybrid system is studied based on the fault behavior of the ANT hybrid system. The relationship between fault, fault diagnosability, fault diagnostic accuracy and measurable system state variables is explained by the system trajectories and the concept of fault entropy is used to describe the degree of fault diagnosability [10] .
2. Theoretical Foundation
2.1. Subsystem Model Class
2.1.1. Model
Equipment rental system is a multi-input multi-output system. Shown in Figure 1, the equipment flow cost of the equipment rental system by transportation equipment maintenance equipment depreciation, equipment storage, equipment configuration, according to the flow characteristics of the device can be modeled equipment rental system. The main factors affecting equipment rental for transportation equipment storage equipment maintenance equipment depreciation, equipment, and therefore can be four variables as input variables equipment rental system. Controllable input for a variety of device-control equipment leasing to provide the state, such as optimum deployment near the equipment, the best equipment maintenance cycles, the entering amount of perturbation is computable rental system but cannot control the external environment, such as changes in oil prices affecting transport costs. It will be treated as a discrete variable device status, only research model equipment has been leased or lease state.
Assuming a system in the working point linear constant, with the input of exogenous autoregressive moving average model to describe the system

 (1)
(1)
type:  Shift operator;
Shift operator; ,
,  ,
,  ,
, .
.
U4 (k) is the k sampling points equipment maintenance, equipment transportation costs, equipment storage, equipment depreciation; na represents the order of the pole; each input channel of the order of zero nbi, i = 1, 2, 3, 4; after pure lag were ndi, i = 1, 2, 3, 4;



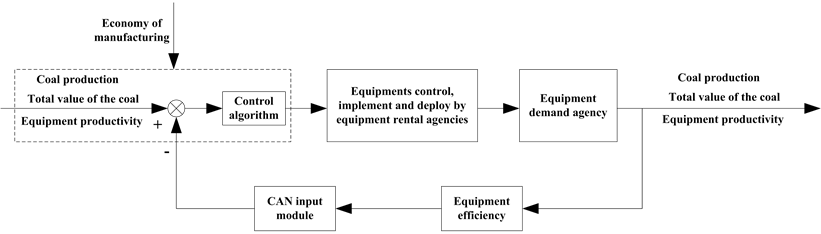
Figure 1. Equipment rental control system.
So, it built equipment rental system model by hybrid system characteristic.
2.1.2. Model Structure Determination
Under certain operating conditions regulated rental system, using statistical hypothesis testing to obtain candidate model structure, assumptions model parameter estimation
 (2)
(2)
When the fit residuals white noise sequence is constituted by a known data observation equation N, Least Squares Parameter Estimation  is close to normal, the mean parameters after convergence of
is close to normal, the mean parameters after convergence of  (N).
(N).  (N) and P (N) excellent fading memory augmented recursive least squares method to calculate;
(N) and P (N) excellent fading memory augmented recursive least squares method to calculate;  is fit residuals equation, and estimate is
is fit residuals equation, and estimate is
 (3)
(3)


When the fit residuals white noise sequence is constituted by a known data observation equation N, Least Squares Parameter Estimation  is close to normal, the mean parameters after convergence of
is close to normal, the mean parameters after convergence of  (N).
(N).  (N) and P (N) excellent fading memory augmented recursive least squares method to calculate,
(N) and P (N) excellent fading memory augmented recursive least squares method to calculate,  is fit residuals equation and estimate is order, equipment rental for the multi-input systems; the confidence interval is zero corresponding model parameters, and may correspond to multiple model structure; candidate models must be verified by computer fit mechanism and systems prior knowledge of the election race again, reducing the number of candidate models.
is fit residuals equation and estimate is order, equipment rental for the multi-input systems; the confidence interval is zero corresponding model parameters, and may correspond to multiple model structure; candidate models must be verified by computer fit mechanism and systems prior knowledge of the election race again, reducing the number of candidate models.
2.1.3. Intelligent Supervisory
Fading memory using augmented recursive least squares method to estimate model parameters of the model structure has been determined, and intelligent supervisory oversight for the identification process, consists of three parts:
1) Inspection P matrix positive definite incentive and signal test;
2) Identification of parameters determines convergence;
3) The combination of mechanistic models, expert experience to determine whether the result is reasonable and trade-offs.

 (4)
(4)
In the equation: (k, r) represents the sampling time; m represents the fluctuation range of the parameter A; L represents the length of the experimental data. Similar arguments B convergence judgment formula parameters A, but because it represents zero, therefore the fluctuation range is set to be greater, and the parameter C is noisy channel parameters of the system, easy to determine their convergence.
2.2. Hybrid Automata Model
According to the basic model of a finite state automaton may establish hybrid automata, hybrid automata embed dynamic behavior of differential equations describe the continuous automatic machine to drive the model, it represents a discrete state machine with a hybrid automatic modes, each corresponding to one sub-systems, in equipment leasing system, device control state having opened and closed 2 in state, corresponding to the five modes: q0 is the initial mode of operation; q1 leasing model for the device; q2 for the device is not leasing model; q3 for the device usage patterns; q4 of equipment failure modes. System of equations for all modes:
 (5)
(5)
In Equation: 
In Equation:  is a disturbance;
is a disturbance;  is a vector parameter to be identified.
is a vector parameter to be identified.
Figure 2 is a hybrid automaton state transition diagram of the system, in which TU, TL, respectively equipment life setpoint. The upper and lower limits, according to the coal mining equipment demand curve for a given set value, the system initial mode is q0, this time device status determines the corresponding model equations f1 or f2, if in a certain mode, the device lifetime limit values on the device between this pattern is maintained and stored to memory mode q3, system description of this mode is f1 or f2. When there is equipment failure, failure mode switch to q4, when troubleshooting after a system restart, recovery mode, return to the initial mode q0.
3. The Results
3.1. Acquisition and Pre-Processing of Data
1 January 2014, certain equipment leasing company to restart the corporate model, began to undertake equipment leasing, an inventory of the number of devices and the status of the entire company’s leasing business conduct sampling and analysis, the use of a period of 12 months, since the signal amplitude magnitude difference larger,
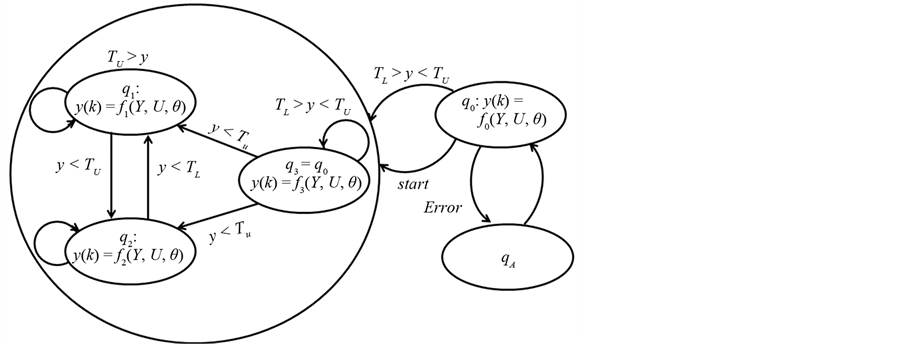
Figure 2. Hybrid automata state transition diagram of equipment rental system.
such as transportation costs, maintenance costs, the sampled data slicer, filtering and normalization preprocessing, which:
Intelligent supervisory convergence parameters have been obtained to supervise the pole and remove the unstable parameter breach mechanism to retain a reasonable value. Take any two sets of identification to obtain convergence parameters.

 (6)
(6)

 (7)
(7)
3.2. Model Structure
By the mechanism analysis, we know that the pole order of not more than 5. Reference Cunha’s analysis, assuming zero order of no more than three bands. Due to the delay of information flow and equipment flow, the device is unlikely, but the flow of information quickly. Assuming that two input sampling period delay is less than 12, Table 1 shows the structure of the final model, the parameters in formula (1).
3.3. Model Parameters
After determining the model structure, with a fading memory by recursive least squares parameter online identification algorithm model. Forgetting factor λ = 0.99, determine conditions for the convergence parameters: five consecutive points fluctuation parameters A are within ±3%, the parameters Bi (i = 1, 2, 3, 4) 5 consecutive fluctuation points are within ±5 within %, do not judge the parameters C convergence.
3.4. Model Prediction and Validation
With the above structure of the equipment rental process model simulation, the upper limit value equipment for one year, the lower limit of three months, the initial state is not lease equipment, according to the switching setpoint control equipment leasing business model based on the state of the transfer of 3.2 Hybrid Automata FIG calculate the analog value of the system (Figure 3).
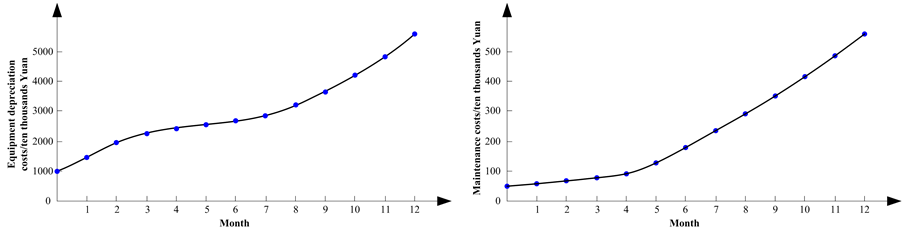
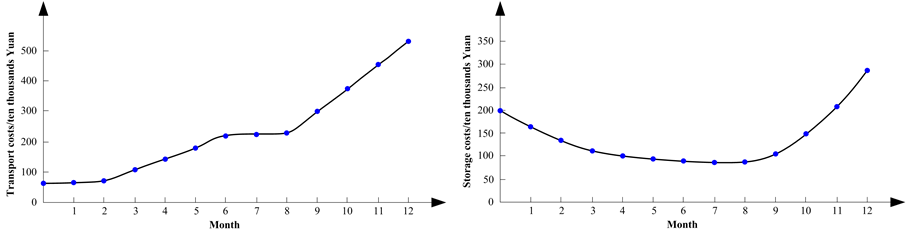
Figure 3. Data of equipment rental factors.

Table 1. Model structure.
4. Conclusion
The equipment leasing is a discrete control variable, but the disturbance input variable is continuous. The equipment rental system is a typical mixed system: system leasing system output variables, control equipment demand-driven variables, equipment rental system hybrid automata model. Hybrid Automata Model maximum error between the measured values and the real is 0.8 million; the smallest error is 4%. When equipment needs more than one year; when the hybrid automata are under control, the system will keep the rental business. Then the equipment rental achievement value requires control device and a combination of other control devices to work together.
Cite this paper
YingTian, (2016) Modeling and Control of Equipment Leasing System Based on Hybrid Automaton. Modern Economy,07,233-238. doi: 10.4236/me.2016.73025
References
- 1. Varaiya, P. (1993) Smart Cars on Smart Roads: Problems of Control. IEEE Transactions on Automatic Control, 38, 195-207.
- 2. Tomlin, C., Lygeros, J. and Sastry, S. (1998) Conflict Resolution for Air Traffic Management: A Study in Multi-Agent Hybrid Systems. IEEE Transactions on Automatic Control, 43, 509-521.
http://dx.doi.org/10.1109/9.664154 - 3. Cassandras, C.G., Pepyne, D.L. and Wardi, Y. (2001) Optimal Control of a Class of Hybrid Systems. IEEE Transactions on Automatic Control, 46, 398-415.
- 4. Hiskens, I.A. and Pai, M.A. (2000) Hybrid Systems View of Power System Modeling. IEEE International Symposium on Circuit and Systems, Geneva, 28 May 2000-31 May 2000, 228-231.
- 5. Hiskens, I.A. (2001) Inverse Problems in Power System. Proceedings of International Symposium on Bulk Power System Dynamic and Control V, 26-31August 2001, Onomichi.
- 6. Zhao, H.-S., Mi, Z.-Q., Niu, D.-X., et al. (2003) Power System Modeling Using Hybrid System Theory. Proceedings of the CSEE, 23, 20-26.
- 7. Cao, R., Li, H.G. and Li, H.Y. (2004) Modeling and Simulation of Sewage-Pump Hybrid System Based on Petri Net. Chinese Journal of Scientific Instrument, 25, 860-862.
- 8. Qin, L.-L., Shi, C. and Wu, G. (2014) Modeling of Temperature Hybrid System in a Modern Greenhouse. Journal of Beijing University of Technology, 40, 996-1001.
- 9. Peng, J.-X., Liu, H.-O. and Chen, H.-Y. (2012) Automated Manual Transmission Fault Diagnosis Based on Hybrid System Characteristic. Journal of Mechanical Engineering, 48, 72-79.
http://dx.doi.org/10.3901/JME.2012.19.072 - 10. Lou, X.-Y. and Ye, Q. (2014) Semi-Global Practical Stabilization of Hybrid System Based on an Encoded Control Mechanism. Acta Antomatica Sinica, 40, 862-874.