Advances in Pure Mathematics
Vol.05 No.07(2015), Article ID:56793,6 pages
10.4236/apm.2015.57037
Simplified Methods for Eigenvalue Assignment
Omar Moh’d El-Basheer El-Ghezawi
Electrical Engineering Department, The University of Jordan, Amman, Jordan
Email: ghezawi@ju.edu.jo
Copyright © 2015 by author and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 20 March 2015; accepted 26 May 2015; published 29 May 2015
ABSTRACT
A state feedback method of reduced order for eigenvalue assignment is developed in this paper. It offers immediate assignment of  eigenvalues, with freedom to assign the remaining
eigenvalues, with freedom to assign the remaining  eigenvalues. The method also enjoys a systematic one-step application in the case where the system has a square submatrix. Further simplification is also possible in certain cases. The method is shown to be applicable to uncontrollable systems, offering the simplest control law when having maximum uncontrollable eigenvalues.
eigenvalues. The method also enjoys a systematic one-step application in the case where the system has a square submatrix. Further simplification is also possible in certain cases. The method is shown to be applicable to uncontrollable systems, offering the simplest control law when having maximum uncontrollable eigenvalues.
Keywords:
Eigenvalue Assignment, Pole Placement, Recursive Methods

1. Introduction
The problem of eigenvalue assignment is well established in control theory where numerous methods have been proposed―each with certain advantages and disadvantages. However, a need still arises for methods which are simple in concept and can be easily implemented. A fulfillment to such need is contributed by this paper.
As compared with some previous methods for eigenvalue assignment, this method doesn’t require specific transformations, knowledge of the open loop eigenvalues or the determination of the closed loop eigenvectors. The method utilizes submatrices stemming from a particular state transformation. The transformation is only needed in the development of the method and not the actual assignment of the eigenvalues.
The proposed method tackles eigenvalue assignment by manipulating lower order matrices, hence enjoying some numerical advantages. Furthermore,  eigenvalues are assigned independently of the remaining
eigenvalues are assigned independently of the remaining  eigenvalues. The method is simplified when
eigenvalues. The method is simplified when , where
, where  is the rank of
is the rank of , resulting in a systematic feedback law requiring only the specification of two
, resulting in a systematic feedback law requiring only the specification of two  matrices. It can be further simplified in cases where the columns of
matrices. It can be further simplified in cases where the columns of  and
and  constitute an invertible matrix.
constitute an invertible matrix.
The method is also shown to apply to uncontrollable systems where certain features of some submatrices are pointed out, thus providing additional degrees of freedom in the control law. Furthermore, in the case of maximum number of uncontrollable eigenvalues, the controller is shown to exhibit its simplest form and offer arbitrariness which may be utilized in fulfilling a myriad of design objectives.
Finally, the systematic and straightforward nature of the method is demonstrated by two examples.
2. The Nonrecursive Feedback Law
The assignment law considered is a state feedback law of the form  applied to the system
applied to the system
 (2.1)
(2.1)
where ,
,  , the rank of
, the rank of  is
is ,
,  and
and  refer to the range and null spaces of
refer to the range and null spaces of .
.
For the development of the simplified methods, a state transformation T is used where , leading to system and input matrices of the form conformal with those in [1] .
, leading to system and input matrices of the form conformal with those in [1] .
 (2.2)
(2.2)
where
 (2.3)
(2.3)
Such requirement on  necessitates
necessitates  where
where  is an
is an  matrix chosen to ensure the nonsingularity of
matrix chosen to ensure the nonsingularity of . The inverse of
. The inverse of  is represented by
is represented by
 (2.4)
(2.4)
where , and
, and  can be looked upon as a name for that partition of
can be looked upon as a name for that partition of  related to
related to  and
and  or as unique generalized inverses of matrices [2] [3] . The generalized inverses are unique in our case since they satisfy the additional conditions
or as unique generalized inverses of matrices [2] [3] . The generalized inverses are unique in our case since they satisfy the additional conditions
 (2.5)
(2.5)
Using the terminology above, the submatrices become
 (2.6)
(2.6)
In addition
 (2.7)
(2.7)
With reference to the recursive method of Hassan et al. [1] ,  eigenvalues are assigned through an
eigenvalues are assigned through an  matrix
matrix  while the remaining
while the remaining  eigenvalues are assigned through the reduced order matrix pair
eigenvalues are assigned through the reduced order matrix pair  i.e. the
i.e. the  eigenvalues to be assigned are eigenvalues of
eigenvalues to be assigned are eigenvalues of . The reduced order matrix
. The reduced order matrix  is determined independently of
is determined independently of 
The recursive method [1] is now manipulated to result in a non-recursive feedback law.
According to [1] ; having undergone all recursive steps the final feedback matrix is given by
 (2.8)
(2.8)
where
 (2.9)
(2.9)
i.e.

substituting  as given in (2.3) and
as given in (2.3) and  as given in (2.4) yields
as given in (2.4) yields


Substituting the values of  as in (2.6), gives
as in (2.6), gives


Using the fact that  as in (2.7), the equation can be finally put in the form
as in (2.7), the equation can be finally put in the form
 (2.10)
(2.10)
The advantage of this feedback law as given in (2.10) is that assignment of n eigenvalues is split into independent assignment of  eigenvalues through
eigenvalues through  and assignment of
and assignment of  eigenvalues of
eigenvalues of  through a suitable
through a suitable . Existing non-recursive methods not requiring state transformation like [4] and [5] or any other eigenvalue assignment method can be used to determine
. Existing non-recursive methods not requiring state transformation like [4] and [5] or any other eigenvalue assignment method can be used to determine . In addition, since
. In addition, since  has dimension
has dimension , the matrix
, the matrix  has a reduced dimension
has a reduced dimension . Further utilization of (2.10) is to be followed in Section 6 when it comes to assignment of uncontrollable eigenvalues, where it is shown that a further reduction in the order of
. Further utilization of (2.10) is to be followed in Section 6 when it comes to assignment of uncontrollable eigenvalues, where it is shown that a further reduction in the order of  is possible to the extent that
is possible to the extent that  can be taken as zero in certain cases.
can be taken as zero in certain cases.
3. A Simplified Method When  and the System Is Controllable
and the System Is Controllable
Although the previous development resulted in a controller which manipulates lower order matrices; the selection of  remains an eigenvalue problem to be solved. Known methods of eigenvalue assignment can be used with the benefit of dealing with reduced order matrices, see [6] . However, further simplification can be made in the case where
remains an eigenvalue problem to be solved. Known methods of eigenvalue assignment can be used with the benefit of dealing with reduced order matrices, see [6] . However, further simplification can be made in the case where and
and  is invertible as developed below.
is invertible as developed below.
Due to the presence of identical terms within the parenthesis’s, we simplify one term in the state feedback matrix
 (2.10)
(2.10)
where  assigns
assigns  eigenvalues and
eigenvalues and  assigns the remaining
assigns the remaining  eigenvalues through
eigenvalues through
 (3.1)
(3.1)
Assuming the nonsingularity of  and that the remaining
and that the remaining  eigenvalues are eigenvalues of the matrix
eigenvalues are eigenvalues of the matrix , then
, then
 (3.2)
(3.2)
Substituting the value of  in any term within a parenthesis of (2.10) gives
in any term within a parenthesis of (2.10) gives

Using (2.7), and recalling 
 (3.3)
(3.3)
substituting this value for the two terms in the parenthesis’s in Equation (2.10) gives
 (3.4)
(3.4)
Some remarks regarding the control law are stated below.
A necessary condition for the invertibility of  is the controllability of the system.
is the controllability of the system.
To see this, suppose  is nonsingular and the system is uncontrollable, then according to (3.4) it is possible to change all
is nonsingular and the system is uncontrollable, then according to (3.4) it is possible to change all  eigenvalues of
eigenvalues of , contradicting the established fact that uncontrollable eigenvalues cannot be changed by state feedback. Hence, only if the system is controllable will
, contradicting the established fact that uncontrollable eigenvalues cannot be changed by state feedback. Hence, only if the system is controllable will  be nonsingular.
be nonsingular.
No need to do the state transformation. The determination of (2.4) is only needed to extract  and to subsequently evaluate the inverse of
and to subsequently evaluate the inverse of  (equals
(equals ).
).
Assignment of  eigenvalues is achieved through
eigenvalues is achieved through  lower order
lower order  and
and  matrices, which can be diagonal, Jordan forms, or skew?symmetric when it comes assignment of complex eigenvalues.
matrices, which can be diagonal, Jordan forms, or skew?symmetric when it comes assignment of complex eigenvalues.
As compared with other assignments laws the highest power of  involved is two while it’s
involved is two while it’s  for certain celebrated methods like Ackermann’s method [7] . This gives numerical advantages in terms of reducing matrix multiplication rounding errors, as demonstrated by Petkov [8] , who showed that matrix multiplications is ill conditioned.
for certain celebrated methods like Ackermann’s method [7] . This gives numerical advantages in terms of reducing matrix multiplication rounding errors, as demonstrated by Petkov [8] , who showed that matrix multiplications is ill conditioned.
4. Further Simplification
Additional simplification can be done to the form of (3.4). By replacing  by
by  where
where ,
,  , and
, and  have the same set of eigenvalues,
have the same set of eigenvalues,


Ending up with a compact form for K as
 (4.1)
(4.1)
If  is chosen as a matrix representation of
is chosen as a matrix representation of , then
, then  can be obtained independently of
can be obtained independently of , see Lancaster [9] and Schott [10] . Also, theorem 6.4.5 pp 115 of Graybill’s book [2] states, if
, see Lancaster [9] and Schott [10] . Also, theorem 6.4.5 pp 115 of Graybill’s book [2] states, if  and
and , then
, then  can be determined independently as
can be determined independently as  and
and  respectively. The left inverse of
respectively. The left inverse of  now involves an inverse of an
now involves an inverse of an  symmetric
symmetric  matrix instead of the inverse of the generally non-symmetric
matrix instead of the inverse of the generally non-symmetric 
 matrix needed to extract
matrix needed to extract .
.
The choice of  has many advantages.
has many advantages.
§ The selection of N is systematic.
§ Such choice gives the advantage of inverting an  matrix through inversion of symmetric
matrix through inversion of symmetric  matrices; thus providing numerical advantages.
matrices; thus providing numerical advantages.
§ Further computational advantages are gained if the Gram-Schmidt ortho-normalization procedure is used (can be easily programmed on a digital computer and is already within the MATLAB function library). In this case, if  is orthonormal, then
is orthonormal, then .
.
A further simplification to (4.1) is possible in the case where  is taken as
is taken as . In which case,
. In which case,  becomes the unity matrix offering a more simplified form given by.
becomes the unity matrix offering a more simplified form given by.
 (4.2)
(4.2)
So, the design process now reduces to the selection of  which specify the desired eigenvalues and the calculation of
which specify the desired eigenvalues and the calculation of  according to (2.5).
according to (2.5).
5. The Uncontrollable Case
The non-recursive feedback law can still be applied when the system is uncontrollable. In our case, and as has been shown by [11] , the pair  and
and  is the uncontrollable pair, i.e. the uncontrollable eigenvalues are eigenvalues of
is the uncontrollable pair, i.e. the uncontrollable eigenvalues are eigenvalues of .
.
For the case , the uncontrollability of the system implies the following:
, the uncontrollability of the system implies the following:
a) The matrix  has to be a singular matrix, otherwise an
has to be a singular matrix, otherwise an  exists which can reassign arbitrarily all eigenvalues of
exists which can reassign arbitrarily all eigenvalues of . This, together with the
. This, together with the  arbitrary eigenvalues assigned by
arbitrary eigenvalues assigned by  makes the total number of arbitrarily assigned eigenvalues
makes the total number of arbitrarily assigned eigenvalues , an impossibility for an uncontrollable system as proved in the control literature.
, an impossibility for an uncontrollable system as proved in the control literature.
b) Since  has to be singular, then it has columns which are scalar multiple of each other, or linear combi-
has to be singular, then it has columns which are scalar multiple of each other, or linear combi-
nations of each other. To see this, due to uncontrollability, the matrix  is an
is an  square matrix which can never have the full rank
square matrix which can never have the full rank . Since
. Since  has necessarily rank
has necessarily rank , this leaves
, this leaves  with a rank less than
with a rank less than , indicating a dependence of
, indicating a dependence of  and since
and since  then
then  may annihi-
may annihi-
late . In the case of annihilation,
. In the case of annihilation,  will have at least a zero column, say the
will have at least a zero column, say the  column. Such fact renders the
column. Such fact renders the  row of
row of  immaterial since the product
immaterial since the product  will not depend on that row. This provides arbitrariness in the
will not depend on that row. This provides arbitrariness in the  row of
row of  which can be utilized further in the design of the controller. It can lead to manipulating lower order matrices within
which can be utilized further in the design of the controller. It can lead to manipulating lower order matrices within , gaining calculation efficiency.
, gaining calculation efficiency.
In the light of the above facts since a nonsingular  doesn’t exists, the formula given in (3.4) cannot be used. Instead, any eigenvalue assignment method available in the control literature (see [12] - [14] ) can be used to calculate
doesn’t exists, the formula given in (3.4) cannot be used. Instead, any eigenvalue assignment method available in the control literature (see [12] - [14] ) can be used to calculate  with the advantage of dealing with matrices of reduced order.
with the advantage of dealing with matrices of reduced order.
6. Justification of  for the Case of Maximum Number of Uncontrollable Eigenvalues
for the Case of Maximum Number of Uncontrollable Eigenvalues
If the system has the maximum number of  uncontrollable eigenvalues, then
uncontrollable eigenvalues, then  is identically the zero matrix. This has to be the case, otherwise, a nonzero
is identically the zero matrix. This has to be the case, otherwise, a nonzero  is capable of changing some of these eigenvalues, an impossibility since the total number of uncontrollable is assumed to be
is capable of changing some of these eigenvalues, an impossibility since the total number of uncontrollable is assumed to be .
.
However, although (3.4) cannot be used to get the final feedback matrix , a most simple form of (2.10) is now considered. The simplicity hinges on letting
, a most simple form of (2.10) is now considered. The simplicity hinges on letting . That is.
. That is.
 (6.1)
(6.1)
The justification for this form stems from the fact that in our case all uncontrollable eigenvalues are those of , and can be specified by
, and can be specified by  which can be
which can be  itself, in which case, and according to (3.1),
itself, in which case, and according to (3.1),  will be zero, in which case
will be zero, in which case  can be taken as zero. Substituting
can be taken as zero. Substituting  in (2.10) results in (6.1).
in (2.10) results in (6.1).
Seeing it differently, since in our case  is identically zero, this makes the product of
is identically zero, this makes the product of  zero. This renders the value of
zero. This renders the value of  immaterial, so any
immaterial, so any  can be taken including the case
can be taken including the case .
.
Note that  in (6.1) doesn’t depend on
in (6.1) doesn’t depend on , so we can relax the uniqueness of
, so we can relax the uniqueness of ; just requiring
; just requiring . This is because there always exists a nonunique
. This is because there always exists a nonunique  with a corresponding
with a corresponding  such that
such that  as required by conditions (2.4). A systematic choice for
as required by conditions (2.4). A systematic choice for  is
is .
.
Note that  can still be totally arbitrary. Such choice can be used to satisfy certain design requirements like controller matrix norm, sensitivity studies, eigenvector specifications, etc. For such cases, one has to resort to (2.10).
can still be totally arbitrary. Such choice can be used to satisfy certain design requirements like controller matrix norm, sensitivity studies, eigenvector specifications, etc. For such cases, one has to resort to (2.10).
7. Examples
Example 1: Consider the controllable system given by
It is required to assign the eigenvalues −2, −3 and −5 ± j4.
To extract F3, MATLAB was used with  taken as an orthonormal representation of
taken as an orthonormal representation of , resulting in
, resulting in
Hence, to five significant digits

The matrices  may be chosen as
may be chosen as

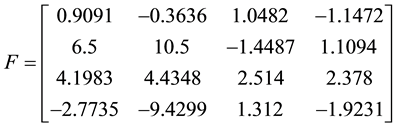
Using the control law given by (3.4) results in the following state feedback matrix

To check, the system closed loop matrix  is
is
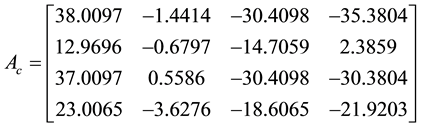
Which has the eigenvalues −2, −3, −5 + j4 and −5 − j4.
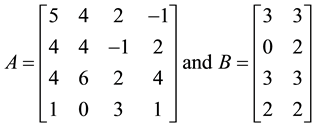
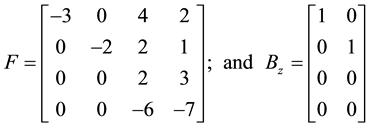
Example 2: Consider the following system [15] where

This system is uncontrollable with −1 and −4 being the uncontrollable eigenvalues. It is desired to assign the two eigenvalues −4 and −5.
So let
To expose the controllable and uncontrollable eigenvalues, we may take 
Yielding
Which shows that , −2 and −3 are the controllable eigenvalues and that the uncontrollable eigenvalues are those of
, −2 and −3 are the controllable eigenvalues and that the uncontrollable eigenvalues are those of ; i.e. −1 and −4. In fact, we need not bother finding them as they aren’t needed in the calculation of K.
; i.e. −1 and −4. In fact, we need not bother finding them as they aren’t needed in the calculation of K.
Besides, the inverse of T isn’t needed to extract . Instead,
. Instead,  can be taken as
can be taken as  giving
giving
Using K as in (6.1) yields a state feedback K matrix, say 

Another , just satisfying
, just satisfying  with no regard to any N may be
with no regard to any N may be
Which results in a different state feedback K matrix, say 
Both  and
and  result in the assignment of two eigenvalues −4 and −5 and the uncontrollable eigenvalues −1 and −4.
result in the assignment of two eigenvalues −4 and −5 and the uncontrollable eigenvalues −1 and −4.
8. Conclusion
The paper has considered a method for eigenvalue assignment based on a scheme of recursive nature. The method involves algebraic manipulation of lower order matrices with an advantage of not requiring state transformation or eigenvectors determination. The method is further simplified in the case where . The method is extended to deal with uncontrollable systems where it is shown that
. The method is extended to deal with uncontrollable systems where it is shown that  exhibits a certain degree of arbitrariness, to the extent of resulting in the simplest form for the state feedback law. The examples considered demonstrate the ease of use of the method.
exhibits a certain degree of arbitrariness, to the extent of resulting in the simplest form for the state feedback law. The examples considered demonstrate the ease of use of the method.
References
- Hassan, M.M. and Amin, M.H. (1987) Recursive Eigenstructure Assignment in Linear Systems. International Journal of Control, 45, 291-310. http://dx.doi.org/10.1080/00207178708933729
- Graybill, F.A. (1983) Matrices with Applications in Statistics. Wadsworth Publishing Company, Belmont.
- Green, P.E. and Carroll, J.D. (1976) Mathematical Tools for Applied Multivariate Analysis. Academic Press, New York.
- El-Ghezawi, O.M.E. (1991) A Two-Stage Method for Eigenvalueigen Vector Assignment. Dirasat, 17, 65-77.
- D’azzo, J.J. and Houpis, C.H. (1995) Linear Control Systems: Analysis and Design. 4th Edition, McGraw-Hill, New York.
- El-Ghezawi, O.M.E. (2010) Unification and Improvement of Certain Methods for Eigenvalue Assignment. Dirasat, 37, 206-213.
- Ackermann, J. and Utkin, V.I. (1998) Sliding Mode Control Design Based on Ackermann’s Formula. IEEE Transactions on Automatic Control, 43, 234-237. http://dx.doi.org/10.1080/00207178708933729
- Petkov, P., Christov, N. and Konstantinov, M. (1991) Computational Methods for Linear Control Systems. Prentice Hall, Upper Saddle River.
- Lancaster, P. and Tismentasky, M. (1985) The Theory of matrices with Applications. 2nd Edition, Academic Press, New York.
- Schott, J.R. (1997) Matrix Analysis for Statistics. John Wiley, Hoboken.
- El-Ghezawi, O.M.E. (1997) Recursive and Modified Recursive Eigenstructure Assignment of Uncontrollable Systems. Dirasat, 24, 620-628.
- Liu, G.P. and Patton, R.J. (1998) Eigenstructure Assignment for Control System Design. John Wiley & Sons, New York.
- White, B.A. (1995) Eigenstructure Assignment: A Survey. Proceedings of the Institution of Mechanical Engineers, 209, 1-11. http://dx.doi.org/10.1243/pime_proc_1995_209_357_02
- Sobel, K.M., Shapiro, E.Y. and Andry, A.N. (1994) Eigenstructure Assignment. International Journal of Control, 59, 13-37. http://dx.doi.org/10.1080/00207179408923068
- Friedland, B. (2005) Control System Design: Introduction to State Space Methods. Dover Publications, New York.